JP5113539B2 - Vehicle contact avoidance support device - Google Patents
Vehicle contact avoidance support device Download PDFInfo
- Publication number
- JP5113539B2 JP5113539B2 JP2008009089A JP2008009089A JP5113539B2 JP 5113539 B2 JP5113539 B2 JP 5113539B2 JP 2008009089 A JP2008009089 A JP 2008009089A JP 2008009089 A JP2008009089 A JP 2008009089A JP 5113539 B2 JP5113539 B2 JP 5113539B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- contact
- avoidance
- contact avoidance
- detection means
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Description
この発明は車両の接触回避支援装置に関し、より具体的には車両(自車)の周囲の対向車などの物体との接触の回避を支援すると共に、接触回避支援動作の過剰を抑制するようにした装置に関する。 The present invention relates to a vehicle contact avoidance support device, and more specifically, to support avoidance of contact with an object such as an oncoming vehicle around the vehicle (own vehicle) and to suppress excessive contact avoidance support operation. Related to the device.
車両に電磁波を送信するレーダを搭載して対向車などの物体を検出・認識し、それとの接触の可能性があると判断される場合、接触回避支援動作を行う装置が知られており、その例として下記の特許文献1記載の技術を挙げることができる。特許文献1記載の技術においては、自車と対向車の横方向の位置の偏差を求め、それに基づいて接触の可能性を判定している。
特許文献1記載の技術にあっては上記のように構成することで対向車との接触の回避を図っているが、交差点あるいは右折レーンにおいて自車も対向車も右折するとき、その直前まで正対しながら接近するため、接触回避支援動作が過剰となることがある。 The technology described in Patent Document 1 avoids contact with the oncoming vehicle by configuring as described above. However, when both the own vehicle and the oncoming vehicle turn right at the intersection or right turn lane, the vehicle is in the right position until just before that. On the other hand, the contact avoidance assisting operation may become excessive due to the approach.
従って、この発明の目的は上記した課題を解決し、交差点あるいは右折レーンにおいて接触回避支援動作が過剰とならないようにした車両の接触回避支援装置を提供することにある。 Therefore, an object of the present invention is to provide a vehicle contact avoidance support device that solves the above-described problems and prevents the contact avoidance support operation from becoming excessive at an intersection or a right turn lane.
上記の目的を解決するために、請求項1にあっては、自車の周囲に存在する物体を検出する物体検出手段と、自車の運動状態を検出する運動状態検出手段と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し、前記予測された進路が重なる場合、前記対向車を障害物と認識して自車との接触の可能性を判定する接触可能性判定手段と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段とを備えた車両の接触回避支援装置において、自車が交差点あるいはその近傍を走行しているか否か判定する走行位置判定手段と、自車が交差点あるいはその近傍を走行していると判定されるとき、前記接触回避支援動作の実行を抑制する接触回避支援動作抑制手段とを備え、前記接触回避支援抑制手段は、自車および前記対向車が共に右に回避すると想定して回避量を算出すると共に、前記算出された回避量に基づいて前記接触回避支援動作の実行を抑制する如く構成した。 In order to solve the above-mentioned object, according to claim 1, object detection means for detecting an object existing around the own vehicle, movement state detection means for detecting the movement state of the own vehicle, and the object detection When the oncoming vehicle is detected based on the output of the means and the movement state detection means, the course of the host vehicle is predicted based on the output of the movement state detection means, and the oncoming vehicle is determined based on the output of the object detection means. A contact possibility determination means for recognizing the oncoming vehicle as an obstacle and determining the possibility of contact with the own vehicle when the predicted paths overlap, and there is a possibility of the contact In the vehicle contact avoidance assistance device comprising contact avoidance support means for executing contact avoidance support operation for assisting contact avoidance with the oncoming vehicle, the vehicle travels at or near an intersection. Running to determine whether or not A location determination unit, when the vehicle is determined to be traveling intersection or in the vicinity thereof and a suppressing contact avoidance assistance operation suppressing means the execution of the contact avoidance assistance operation, the contact avoidance assistance inhibition means , calculates the amount of avoidance is assumed that the vehicle and the oncoming vehicle both to avoid the right, and configured as you suppress the execution of the contact avoidance assistance operation based on the avoidance amount the calculated.
請求項2にあっては、自車の周囲に存在する物体を検出する物体検出手段と、自車の運動状態を検出する運動状態検出手段と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し、前記予測された進路が重なる場合、前記対向車を障害物と認識して自車との接触の可能性を判定する接触可能性判定手段と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段とを備えた車両の接触回避支援装置において、自車が右折レーンを走行しているか否か判定する走行レーン判定手段と、自車が右折レーンを走行していると判定されるとき、前記接触回避支援動作の実行を抑制する接触回避支援動作抑制手段とを備え、前記接触回避支援抑制手段は、自車および前記対向車が共に右に回避すると想定して回避量を算出すると共に、前記算出された回避量に基づいて前記接触回避支援動作の実行を抑制する如く構成した。 In claim 2, the object detection means for detecting an object existing around the own vehicle, the movement state detection means for detecting the movement state of the own vehicle, and the outputs of the object detection means and the movement state detection means When the oncoming vehicle is detected based on the output of the motion state detecting means, the course of the own vehicle is predicted, and the course of the oncoming vehicle is predicted based on the output of the object detecting means, and the predicted If it is determined that there is a possibility of contact, contact possibility determining means for recognizing the oncoming vehicle as an obstacle and determining the possibility of contact with the own vehicle, In a vehicle contact avoidance assistance device comprising contact avoidance support means for performing contact avoidance support operation for supporting contact avoidance with the vehicle, a travel lane determination means for determining whether or not the vehicle is traveling in a right turn lane, The vehicle is driving on the right turn lane When it is determined that, a suppressing contact avoidance assistance operation suppressing means the execution of the contact avoidance assistance operation, the contact avoidance assistance inhibition means, assuming the vehicle and the oncoming vehicle both to avoid the right It calculates the amount of avoidance Te was constructed as that to suppress execution of the contact avoidance assistance operation based on the avoidance amount the calculated.
請求項3に係る車両の接触回避支援装置にあっては、自車の乗員の右折意図を検出する右折意図検出手段を備えると共に、前記接触回避支援動作抑制手段は、自車の乗員の右折意図が検出されたとき、前記接触回避支援動作の実行を抑制する如く構成した。 In the vehicle contact avoidance support device according to claim 3, the vehicle avoidance support operation suppression unit includes a right turn intention detection unit that detects the right turn intention of the occupant of the own vehicle, and the contact avoidance support operation suppression unit includes the right turn intention of the occupant of the own vehicle. when is detected, and configured as to suppress the execution of the previous SL contact avoidance assistance operation.
請求項4にあっては、自車の周囲に存在する物体を検出する物体検出手段と、自車の運動状態を検出する運動状態検出手段と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し、前記予測された進路が重なる場合、前記対向車を障害物と認識し、所定の判定条件に従って自車との接触の可能性を判定する接触可能性判定手段と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段とを備えた車両の接触回避支援装置において、前記対向車が直進すると想定して回避量を算出すると共に、前記算出した回避量に基づいて接触回避支援作動距離を算出する接触回避支援作動距離算出手段と、自車が交差点あるいはその近傍を走行しているか否か判定する走行位置判定手段と、自車が交差点あるいはその近傍を走行していると判定されるとき、自車および前記対向車が共に減速して停止すると想定して停止までに必要な停止必要距離を算出する停止必要距離算出手段と、自車が交差点あるいはその近傍を走行していると判定されるとき、前記判定条件を変更する判定条件変更手段とを備え、前記判定条件変更手段は、前記算出された接触回避支援作動距離が前記停止必要距離を超えるとき、前記停止必要距離に基づいて前記判定条件を変更する如く構成した。 In claim 4, the object detection means for detecting an object existing around the own vehicle, the movement state detection means for detecting the movement state of the own vehicle, and the outputs of the object detection means and the movement state detection means When the oncoming vehicle is detected based on the output of the motion state detecting means, the course of the own vehicle is predicted, and the course of the oncoming vehicle is predicted based on the output of the object detecting means, and the predicted If the courses overlap, the oncoming vehicle is recognized as an obstacle, and contact possibility determining means for determining the possibility of contact with the own vehicle according to a predetermined determination condition is determined, and it is determined that there is a possibility of the contact. A contact avoidance assisting device for a vehicle comprising contact avoidance assisting means for performing a contact avoidance assisting operation for assisting contact avoidance with the oncoming vehicle, and calculating an avoidance amount assuming that the oncoming vehicle goes straight ahead. , Calculated above A contact avoidance assistance operation distance calculating means for calculating the contact avoidance assistance operation distance based on避量and determining traveling position determining means whether the vehicle is traveling the intersection or in the vicinity of, the vehicle is an intersection or a When it is determined that the vehicle is traveling in the vicinity, it is assumed that both the own vehicle and the oncoming vehicle decelerate and stop, and the necessary stop distance calculating means for calculating the necessary stop distance required until the stop, and the own vehicle Or, when it is determined that the vehicle is traveling in the vicinity thereof, it includes a determination condition changing means for changing the determination condition , and the determination condition changing means is configured such that the calculated contact avoidance assist working distance is equal to the required stop distance. more than time, and configured as to change the determination condition based on the stop required distance.
請求項5にあっては、自車の周囲に存在する物体を検出する物体検出手段と、自車の運動状態を検出する運動状態検出手段と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し、前記予測された進路が重なる場合、前記対向車を障害物と認識し、所定の判定条件に従って自車との接触の可能性を判定する接触可能性判定手段と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段とを備えた車両の接触回避支援装置において、前記対向車が直進すると想定して回避量を算出すると共に、前記算出した回避量に基づいて接触回避支援作動距離を算出する接触回避支援作動距離算出手段と、自車が右折レーンを走行しているか否か判定する走行レーン判定手段と、自車が右折レーンを走行していると判定されるとき、自車および前記対向車が共に減速して停止すると想定して停止までに必要な停止必要距離を算出する停止必要距離算出手段と、自車が右折レーンを走行していると判定されるとき、前記判定条件を変更する判定条件変更手段とを備え、前記判定条件変更手段は、前記算出された接触回避支援作動距離が前記停止必要距離を超えるとき、前記停止必要距離に基づいて前記判定条件を変更する如く構成した。 In claim 5, the object detection means for detecting an object existing around the own vehicle, the movement state detection means for detecting the movement state of the own vehicle, and the outputs of the object detection means and the movement state detection means When the oncoming vehicle is detected based on the output of the motion state detecting means, the course of the own vehicle is predicted, and the course of the oncoming vehicle is predicted based on the output of the object detecting means, and the predicted If the courses overlap, the oncoming vehicle is recognized as an obstacle, and contact possibility determining means for determining the possibility of contact with the own vehicle according to a predetermined determination condition is determined, and it is determined that there is a possibility of the contact. A contact avoidance assisting device for a vehicle comprising contact avoidance assisting means for performing a contact avoidance assisting operation for assisting contact avoidance with the oncoming vehicle, and calculating an avoidance amount assuming that the oncoming vehicle goes straight ahead. , Calculated above A contact avoidance assistance operation distance calculating means for calculating the contact avoidance assistance operation distance based on避量, and determines the travel lane determining unit whether or not the own vehicle is running on a right turn lane, the host vehicle is traveling on a right turn lane When it is determined that the host vehicle and the oncoming vehicle both decelerate and stop, the required stop distance calculating means for calculating the required stop distance required until the vehicle stops, and the host vehicle travels on the right turn lane. Determination condition changing means for changing the determination condition when it is determined that the determination condition change means is required to stop when the calculated contact avoidance assistance operating distance exceeds the required stop distance. It was constructed as to change the determination condition based on the distance.
請求項6に係る車両の接触回避支援装置にあっては、自車の乗員の右折意図を検出する右折意図検出手段を備えると共に、前記判定条件変更手段は、自車の乗員の右折意図が検出されたとき、前記判定条件を変更する如く構成した。 In the vehicle contact avoidance support device according to claim 6, the vehicle is provided with a right turn intention detecting means for detecting the right turn intention of the occupant of the own vehicle , and the determination condition changing means detects the right turn intention of the occupant of the own vehicle. when, and as configured to change the pre-Symbol determination condition.
請求項1に係る車両の接触回避支援装置にあっては、対向車との接触の可能性があると判定される場合、それとの接触回避を支援する接触回避支援動作を実行する接触回避支援手段を備え、自車が交差点あるいはその近傍を走行しているか否か判定し、肯定されるとき、自車および対向車が共に右に回避すると想定して算出された回避量に基づいて接触回避支援動作の実行を抑制する如く構成したので、交差点で自車と対向車が共に右折するような状況において接触回避支援動作が過剰となるのを防止することができる。 In the contact avoidance support device for a vehicle according to claim 1, when it is determined that there is a possibility of contact with an oncoming vehicle, a contact avoidance support means for performing a contact avoidance support operation for supporting contact avoidance with the oncoming vehicle. Bei example a vehicle is judged whether or not the traveling intersection or near, when the result is affirmative, the contact avoidance based on the avoidance amount vehicle and oncoming vehicle are both calculated on the assumption that avoids the right Since it is configured to suppress the execution of the support operation, it is possible to prevent the contact avoidance support operation from becoming excessive in a situation where both the own vehicle and the oncoming vehicle turn right at the intersection.
請求項2に係る車両の接触回避支援装置にあっては、対向車との接触の可能性があると判定される場合、それとの接触回避を支援する接触回避支援動作を実行する接触回避支援手段を備え、自車が右折レーンを走行しているか否か判定し、肯定されるとき、自車および対向車が共に右に回避すると想定して算出された回避量に基づいて接触回避支援動作の実行を抑制する如く構成したので、自車の右折を精度良く予測して抑制することとなって接触回避支援動作が過剰となるのを防止することができる。 In the contact avoidance support device for a vehicle according to claim 2, when it is determined that there is a possibility of contact with an oncoming vehicle, contact avoidance support means for performing a contact avoidance support operation for supporting contact avoidance with the oncoming vehicle Bei give a determines whether the vehicle is running on a right turn lane or, when the result is affirmative, the contact avoidance assistance operation based on the avoidance amount vehicle and oncoming vehicle are both calculated on the assumption that avoids the right Therefore, it is possible to prevent the contact avoidance assist operation from becoming excessive because the right turn of the own vehicle is accurately predicted and suppressed.
請求項3に係る車両の接触回避支援装置にあっては、自車の乗員の右折意図を検出すると共に、自車の乗員の右折意図が検出されたとき、接触回避支援動作の実行を抑制する如く構成したので、上記した効果に加え、自車の右折を一層精度良く予測して抑制することとなって接触回避支援動作が過剰となるのを一層良く防止することができる。 In the vehicle contact avoidance support device according to claim 3, the right turn intention of the passenger of the own vehicle is detected, and the execution of the contact avoidance support operation is suppressed when the right turn intention of the passenger of the own vehicle is detected. Thus, in addition to the above-described effects, the right turn of the host vehicle can be predicted and suppressed with higher accuracy, and the contact avoidance support operation can be further prevented from being excessive.
請求項4に係る車両の接触回避支援装置にあっては、所定の判定条件に従って対向車との接触の可能性を判定すると共に、接触の可能性があると判定される場合、それとの接触回避を支援する接触回避支援動作を実行する接触回避支援手段を備え、対向車が直進すると想定して算出した回避量に基づいて接触回避支援作動距離を算出する一方、自車が交差点あるいはその近傍を走行しているか否か判定し、肯定されるとき、自車および対向車が共に減速して停止すると想定して停止までに必要な停止必要距離を算出し、接触回避支援作動距離が停止必要距離を超えるとき、停止必要距離に基づいて判定条件を変更する如く構成したので、状況に適した接触可能性判断が可能となり、よって接触回避支援動作が過剰となるのを防止することができる。 In the vehicle contact avoidance assistance device according to claim 4, the possibility of contact with the oncoming vehicle is determined according to a predetermined determination condition, and when it is determined that there is a possibility of contact, contact avoidance with the vehicle is avoided. e Bei contact avoidance assistance means for performing a contact avoidance assistance operation to support, while calculating the contact avoidance assistance operation distance based on the avoidance amount calculated on the assumption that an oncoming vehicle goes straight, the vehicle is an intersection or near the When it is affirmed, it is assumed that both the host vehicle and the oncoming vehicle will decelerate and stop, calculate the necessary stop distance required before stopping, and the contact avoidance assistance working distance must be stopped when exceeding the distance, since as configured to change the determination condition based on the stop required distance, the contact possibility determining becomes possible suitable conditions, therefore be in contact avoidance assistance operation is prevented from becoming excessive That.
請求項5に係る車両の接触回避支援装置にあっては、所定の判定条件に従って対向車との接触の可能性を判定すると共に、接触の可能性があると判定される場合、それとの接触回避を支援する接触回避支援動作を実行する接触回避支援手段を備え、対向車が直進すると想定して算出した回避量に基づいて接触回避支援作動距離を算出する一方、自車が右折レーンを走行しているか否か判定し、自車が右折レーンを走行していると判定されるとき、自車および対向車が共に減速して停止すると想定して停止までに必要な停止必要距離を算出し、接触回避支援作動距離が停止必要距離を超えるとき、停止必要距離に基づいて判定条件を変更する如く構成したので、自車の右折を精度良く予測することとなって接触の可能性を的確に判定することができ、よって接触回避支援動作が過剰となるのを防止することができる。 In the vehicle contact avoidance support device according to claim 5, the possibility of contact with the oncoming vehicle is determined according to a predetermined determination condition, and when it is determined that there is a possibility of contact, contact avoidance with the vehicle is avoided. e Bei contact avoidance assistance means for performing a contact avoidance assistance operation to support, while calculating the contact avoidance assistance operation distance based on the avoidance amount calculated on the assumption that an oncoming vehicle goes straight, traveling the vehicle right turn lane When it is determined that the host vehicle is traveling on the right turn lane , the required stop distance required until stopping is calculated assuming that the host vehicle and the oncoming vehicle both decelerate and stop. When the contact avoidance support working distance exceeds the required stop distance, the judgment condition is changed based on the required stop distance . Therefore, the right turn of the own vehicle is accurately predicted, and the possibility of contact is accurately determined. To judge Can, therefore contact avoidance assistance operation can be prevented from becoming excessive.
請求項6に係る車両の接触回避支援装置にあっては、自車の乗員の右折意図を検出すると共に、自車の乗員の右折意図が検出されたとき、判定条件を変更する如く構成したので、上記した効果に加え、自車の右折を一層精度良く予測することとなり、よって接触回避支援動作が過剰となるのを一層良く防止することができる。 In the vehicle contact avoidance support device according to claim 6, the right turn intention of the occupant of the own vehicle is detected, and the determination condition is changed when the right turn intention of the occupant of the own vehicle is detected. In addition to the above-described effects, the right turn of the host vehicle is predicted with higher accuracy, and therefore it is possible to better prevent the contact avoidance assist operation from becoming excessive.
以下、添付図面に即してこの発明に係る車両の接触回避支援装置を実施するための最良の形態について説明する。 The best mode for carrying out a vehicle contact avoidance assisting apparatus according to the present invention will be described below with reference to the accompanying drawings.
図1はこの発明の第1実施例に係る車両の接触回避支援装置を全体的に示す概略図である。 FIG. 1 is a schematic view showing a vehicle contact avoidance assisting apparatus according to a first embodiment of the present invention.
図1において、符号10は接触回避支援装置を示し、装置10は、内燃機関(図に「ENG」と示す。以下「エンジン」という)12の駆動力を自動変速機(図に「T/M」と示す)14から駆動輪(図示せず)に伝達する車両(自車。エンジン12、自動変速機14などで部分的に示す)16に搭載され、制御装置18と、ブレーキアクチュエータ20と、EPS(Electric Power Steering)アクチュエータ22と、警報装置24と、シートベルト駆動機構26とを備える。
In FIG. 1,
制御装置18は、走行制御部28と、エンジン制御部30と、変速制御部32と、ブレーキ制御部34と、EPS制御部36と、シートベルト制御部38とからなる。これら制御部は全てマイクロコンピュータを備えると共に、相互に通信自在に構成される。
The
走行制御部28は接触回避支援動作を行う接触回避支援手段などとして機能するが、それについては後述する。エンジン制御部30と変速制御部32は、エンジン12と自動変速機14の動作を制御するが、エンジン制御部30と変速制御部32の動作は本願の要旨と直接の関連を有しないため、説明は省略する。
The
ブレーキアクチュエータ20は、ブレーキペダル(図示せず)の踏み込み力を増力するマスタバック(図示せず)と、増力された踏み込み力で制動圧を発生し、ブレーキ油圧機構(図示せず)を介して駆動輪と従動輪に装着されたブレーキを動作させるマスタシリンダ(図示せず)からなる。
The
ブレーキ制御部34はブレーキアクチュエータ20に接続される。ブレーキ制御部34は、走行制御部28の指令に応じ、ブレーキ油圧機構を介して乗員(運転者)のブレーキペダル操作とは独立にブレーキアクチュエータ20を動作させる自動ブレーキを実行することで車両16の走行を制動(減速)する。
The
EPSアクチュエータ22は、前輪が駆動輪である場合を例にとって説明すると、ステアリングシャフトなどから伝達されるステアリングホイール(図示せず)の回転運動をピニオンを介してラック(共に図示せず)の往復運動に変換し、タイロッド(図示せず)を介して前輪を転舵させる機構において、そのラック上に配置された電動機からなる。
The
EPS制御部36はEPSアクチュエータ22に接続される。EPS制御部36は、走行制御部28の指令に応じ、EPSアクチュエータ22を動作させて乗員(運転者)に操舵トルクを付与する。
The
警報装置24は車両16の運転席付近に設置されたオーディオスピーカとインディケータ(共に図示せず)を備え、走行制御部28に接続される。走行制御部28は警報装置24を動作させ、音声と視覚を介して乗員に警報する。
The
シートベルト駆動機構26は、車両16の運転席に設置され、運転者が装着するシートベルト(図示せず)に接続され、シートベルトを駆動する。シートベルト制御部38はシートベルト駆動機構26に接続され、その駆動力を調節して乗員に警報する。また、走行制御部28は、さらに必要に応じ、EPS制御部36を介してEPSアクチュエータ22を動作させてステアリングホイールを回転させることによっても乗員に警報する。
The seat
上記に加え、装置10は、図示のようなセンサ類を備える。
In addition to the above, the
以下説明すると、撮影装置40は、CCDカメラやC−MOSカメラからなるカメラ40aと画像処理部40bからなる。カメラ40aは車両16のフロントウィンドウ内の車室側でルームミラー近傍の位置に配置され、フロントウィンドウ越しに進行方向前方を撮影する。画像処理部40bは、カメラ40aで撮影して得た画像を入力し、フィルタリングや二値化などの画像処理を行って画像データを生成し、走行制御部28に出力する。
As will be described below, the photographing
レーダ装置42は、車両16のボディのノーズ部などに配置されてレーザ光やミリ波などの電磁波を車両16の進行方向前方などの周囲に発信(送信)するレーダ42aと、それが車両16の周囲に存在する物体によって反射されて生じた反射波を受信するレーダ処理部42bからなる。レーダ処理部42bは反射波の有無から物体を検出すると共に、物体が検出されるときはその距離、方位、移動速度を検出して走行制御部28に出力する。
The
操舵トルクセンサ44はステアリングホイールとEPSアクチュエータ22の間に配置され、ステアリングホイールから乗員が入力(操作)した操舵力(操舵トルク)の方向と大きさに応じた出力を生じる。操舵角センサ46はステアリングシャフトの付近に配置され、ステアリングホイールを通じて乗員が入力(操作)した操舵角の方向と大きさに応じた出力を生じる。
The
ヨーレートセンサ48は車両16の重心位置付近に配置され、車両16の鉛直軸(ヨー軸)回りのヨーレート(回転角速度)に応じた出力を生じる。車速センサ50は駆動輪のドライブシャフト(図示せず)の付近に配置され、駆動輪の所定回転ごとにパルスを出力する。また、右折用のウインカ(図示せず)の通電回路に配置され、通電されて点灯されるときオン信号を出力するウインカスイッチ52も配置される。
The
上記したセンサの出力も走行制御部28に送られ、走行制御部28はそれらの入力値から操舵トルクなどを検出すると共に、車速センサ50の出力をカウントして車両16の走行速度である車速を検出する。
The output of the above-described sensor is also sent to the
装置10は、さらに、ナビゲーション装置54を備える。ナビゲーション装置54は、現在位置検出部54aと、ナビゲーション処理部54bと、地図データ記憶部54cと、入力部54dと、表示部54eからなる。
The
現在位置検出部54aは、GPS(Global Positioning System)信号などの測位信号を受信する測位信号受信部54a1と、車両16の水平面での向きや鉛直方向に対する傾斜角度などに応じた信号を出力するジャイロセンサ54a2を備え、受信した測位信号あるいはジャイロセンサ54a2と前記した車速センサ50の出力に基づく自律航法に基づいて車両16の現在位置を算出する。
The current
地図データ記憶部54cはCD−ROMなどの記憶媒体からなり、車両16が走行する道路の幅員、交差点、右折レーンなどを含む地図(道路)データを記憶(格納)する。入力部54dは過剰動作抑制スイッチ(後述)などを含むスイッチ群やキーボードなどからなり、表示部54eはディスプレイを備える。
The map data storage unit 54c includes a storage medium such as a CD-ROM, and stores (stores) map (road) data including the width of the road on which the
ナビゲーション処理部54bは、地図データ記憶部54cに記憶される地図(道路)データにおいて現在位置検出部54aで得られる車両16の現在位置、あるいは入力部54dに入力される車両16の位置などを表示部54eに表示させる。ナビゲーション処理部54bと走行制御部28は通信自在に接続され、ナビゲーション処理部54bは自車16が走行する位置を道路地図データ上に特定する情報を走行制御部28に出力する。
The
図2は、図1に示す装置10の制御を示すフロー・チャートである。図2は、より具体的には装置10の制御装置18の内の走行制御部28の動作を示すフロー・チャートである。
FIG. 2 is a flowchart showing the control of the
以下説明すると、S10において前記したレーダ装置42のレーダ処理部42bの出力に基づき、自車(車両)16の周囲の物体(ガードレール、先行車、対向車など)を検出すると共に、検出された物体の自車16に対する相対位置と相対速度を検出する。次いでS12に進み、車速センサ50とヨーレートセンサ48の出力から自車(車両)16の車速とヨーレート、即ち、自車16の運動状態を検出する。
In the following, in S10, an object (a guardrail, a preceding vehicle, an oncoming vehicle, etc.) around the host vehicle (vehicle) 16 is detected based on the output of the
次いでS14に進み、物体の自車16に対する相対速度と自車16の車速の差から物体の対地速度を求め、対地速度が自車16の方向に向かってくる物体、即ち、対向車があるか否か判断する。
Next, in S14, the ground speed of the object is obtained from the difference between the relative speed of the object with respect to the
S14で否定されるときは以降の処理をスキップすると共に、肯定されるときは対向車が検出されたと判断し、S16に進み、検出された運動状態(換言すればS12の運動状態検出手段の出力)に基づいて自車16の進路を予測すると共に、対向車の位置の変化(換言すればS10の物体検出手段の出力)に基づいて対向車の進路を予測する。 When the result in S14 is negative, the subsequent processing is skipped. When the result is affirmative, it is determined that an oncoming vehicle has been detected, and the process proceeds to S16, where the detected motion state (in other words, the output of the motion state detection means in S12). ) Based on the change in the position of the oncoming vehicle (in other words, the output of the object detection means in S10).
次いでS18に進み、予測された自車16の進路と対向車の進路が重なるか否か判断し、否定されるときは以降の処理をスキップすると共に、肯定されるときはS20に進み、対向車を障害物と認識する。
Next, the process proceeds to S18, where it is determined whether or not the predicted course of the
次いでS22に進み、ナビゲーション装置54のナビゲーション処理部54bにアクセスして地図データ記憶部54cに記憶される地図(道路)データを読み出し、自車16が交差点あるいはその近傍、より具体的には交差点か、その所定距離(例えば30m)手前を走行しているか否か判断する。
Next, in S22, the
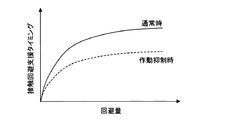
S22で否定されるときはS24に進み、対向車は直進すると想定し、図3に示す如く、左に回避するための回避量と右に回避するための回避量をそれぞれ算出し、それらの中の小さい方を選択する。次いでS26に進み、選択された回避量で図4に示す特性の中、通常時の特性を検索して接触回避支援タイミング(時間)を算出する。 When the result in S22 is negative, the program proceeds to S24, and it is assumed that the oncoming vehicle goes straight, and as shown in FIG. 3, the avoidance amount for avoiding to the left and the avoidance amount for avoiding to the right are calculated, Select the smaller one. Next, the process proceeds to S26, and the contact avoidance support timing (time) is calculated by searching the normal characteristics among the characteristics shown in FIG. 4 with the selected avoidance amount.
他方、S22で肯定されるときはS28に進み、自車16も対向車も共に右に回避(右折)すると想定し、図5に示す如く、右に回避するための回避量を算出し、S30に進み、算出された回避量で図4に示す特性の中、作動抑制時の特性を検索して接触回避支援タイミング(時間)を算出する。
On the other hand, when the result in S22 is affirmative, the program proceeds to S28, where it is assumed that both the
次いでS32に進み、算出された接触回避支援タイミングに、自車16に対する対向車の相対速度を乗算して接触回避支援作動距離を算出し、S34に進み、接触回避支援作動距離が自車16に対する対向車の相対距離(自車16と対向車との離間距離)を超えるか否か判断する。
Next, the process proceeds to S32, the contact avoidance support working distance is calculated by multiplying the calculated contact avoidance support timing by the relative speed of the oncoming vehicle with respect to the
S34で否定されるときは以降の処理をスキップすると共に、肯定されるときは対向車と自車16との接触の可能性があると判定し、S36に進み、警報作動、具体的には接触回避支援動作の実行、より具体的には警報装置24を作動させて音声または視覚による警報を実行する。
When the result in S34 is negative, the subsequent processing is skipped. When the result is affirmative, it is determined that there is a possibility of contact between the oncoming vehicle and the
図4を参照して上記を説明すると、回避量が大きくなるほど回避に時間がかかるため、接触回避支援タイミングは図示のように回避量が増加するほど増大するように設定される一方、作動抑制時にあっては、通常時に比し、小さいように設定される。 The above description will be described with reference to FIG. 4. Since the avoidance time increases as the avoidance amount increases, the contact avoidance support timing is set so as to increase as the avoidance amount increases as shown in FIG. In that case, it is set to be smaller than the normal time.
この値が相対速度に乗算されて接触回避支援作動距離が決定される。接触回避支援タイミングが小さくなると、相対距離を超え難くなることから、交差点あるいはその近傍を走行する作動抑制時にあっては、作動抑制時の特性を選択して接触回避支援タイミングを小さく算出することで、接触の可能性があると判定され難くなり、警報装置24を作動され難くすることができる。
This value is multiplied by the relative speed to determine the contact avoidance assist working distance. When the contact avoidance support timing becomes small, it becomes difficult to exceed the relative distance.Therefore, when the operation is suppressed at the intersection or in the vicinity thereof, by selecting the characteristic at the time of the operation suppression and calculating the contact avoidance support timing small. It becomes difficult to determine that there is a possibility of contact, and the
第1実施例にあっては上記の如く、自車16の周囲に存在する物体を検出する物体検出手段(撮影装置40、レーダ装置42、走行制御部28,S10)と、自車16の運動状態を検出する運動状態検出手段(車速センサ50、ヨーレートセンサ48,S12)と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき(S14)、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し(S16)、前記予測された進路が重なる場合(S18)、前記対向車を障害物と認識して自車との接触の可能性を判定する接触可能性判定手段(S20からS34)と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段(S36)とを備えた車両16の接触回避支援装置10において、自車が交差点あるいはその近傍を走行しているか否か判定する走行位置判定手段(S22)と、自車が交差点あるいはその近傍を走行していると判定されるとき、前記接触回避支援動作の実行を抑制する接触回避支援動作抑制手段とを備え、前記接触回避支援手段は、自車16および前記対向車が共に右に回避(右折)すると想定して回避量を算出する(S28)と共に、前記算出された回避量に基づいて前記接触回避支援動作の実行を抑制する(S30)、即ち、接触回避支援作動距離を小さく設定することで接触回避支援動作の実行を抑制する如く構成したので、交差点で自車16と対向車が共に右折するような状況において接触回避支援動作が過剰となるのを防止することができる。
In the first embodiment, as described above, the object detection means (the photographing
図6はこの発明の第2実施例に係る車両の接触回避支援装置の動作を示すフロー・チャートである。 FIG. 6 is a flowchart showing the operation of the vehicle contact avoidance assisting device according to the second embodiment of the present invention.
第2実施例は第1実施例の変形例であり、図2に示す第1実施例のフロー・チャートと相違する点に焦点をおいて説明すると、S10からS20まで同様の処理を行ってS22に進み、S22で肯定されるときはS22aに進み、自車16の乗員が右折意図を有するか否か判断する。右折意図は前記ウインカスイッチ52の出力から判断し、ウインカスイッチ52がオン信号を出力しているとき、乗員が自車16を右に操舵して右折する意図を有すると判断する。
The second embodiment is a modification of the first embodiment, and will be described with a focus on differences from the flowchart of the first embodiment shown in FIG. 2. The same processing from S10 to S20 is performed and S22 is performed. When the result in S22 is affirmative, the program proceeds to S22a, in which it is determined whether the occupant of the
S22aで否定されるときはS24以降に進むと共に、肯定されて自車16の乗員が右折意図を有すると判断されるときはS28に進み、自車16も対向車も共に右に回避(右折)すると想定して図5に示すように右に回避するための回避量を算出し、S30に進み、算出された回避量から図4に示す特性の中、作動抑制時の特性を検索して接触回避支援タイミング(時間)を算出する。尚、S32以降の処理を含む残余の構成は、第1実施例と異ならない。
When the result in S22a is negative, the process proceeds to S24 and after, and when it is affirmed and it is determined that the occupant of the
第2実施例に係る車両16の接触回避支援装置10にあっては上記の如く、自車16の乗員の右折意図を検出する右折意図検出手段を備えると共に(S22a)、前記接触回避支援動作抑制手段は、交差点あるいはその近傍にあって自車16の乗員の右折意図が検出されたとき、S28以降に進んで接触回避支援動作の実行を抑制する(S28からS30)如く構成したので、第1実施例で延べた効果に加え、自車16の右折を一層精度良く予測して抑制することとなって接触回避支援動作が過剰となるのを一層良く防止することができる。
As described above, the contact
図7はこの発明の第3実施例に係る車両の接触回避支援装置の動作を示すフロー・チャートである。 FIG. 7 is a flow chart showing the operation of the vehicle contact avoidance assistance device according to the third embodiment of the present invention.
図2に示す第1実施例のフロー・チャートと相違する点に焦点をおいて説明すると、S100からS110まで第1実施例と同様の処理を行った後、S112に進み、ナビゲーション装置54のナビゲーション処理部54bにアクセスして地図データ記憶部54cに記憶される地図(道路)データを読み出し、自車16が右折レーンを走行しているか否か判断する。
2 will be described focusing on the points of difference from the flowchart of the first embodiment shown in FIG. 2. After performing the same processing as in the first embodiment from S100 to S110, the process proceeds to S112, where the
ここで、「右折レーン」は交差点内に設けられる右折用のレーンのみならず、交差点以外の場所、例えば右折しつつ対向車線を横切って駐車場あるいはショッピングモールに進入させるためのレーンをいう。 Here, the “right turn lane” means not only a right turn lane provided in an intersection, but also a place other than the intersection, for example, a lane for making a right turn and entering a parking lot or a shopping mall across an opposite lane.
S112で否定されるときはS114に進み、対向車は直進すると想定して図3に示すように左右の回避量をそれぞれ算出して小さい方を選択し、S116に進み、選択された回避量から図4に示す特性の中、通常時の特性を検索して接触回避支援タイミング(時間)を算出する。 When the result in S112 is negative, the process proceeds to S114, and it is assumed that the oncoming vehicle goes straight. As shown in FIG. 3, the left and right avoidance amounts are calculated and the smaller one is selected, and the process proceeds to S116. Of the characteristics shown in FIG. 4, the normal characteristics are searched to calculate the contact avoidance support timing (time).
他方、S112で肯定されるときはS118に進み、自車16も対向車も共に右に回避(右折)すると想定し、図5に示す如く、右に回避するための回避量を算出し、S120に進み、算出された回避量から図4に示す特性の中、作動抑制時の特性を検索して接触回避支援タイミング(時間)を算出する。
On the other hand, when the result in S112 is affirmative, the routine proceeds to S118, where it is assumed that both the
次いでS122に進み、算出された接触回避支援タイミングに相対速度を乗算して接触回避支援作動距離を算出し、S124に進み、接触回避支援作動距離が自車16に対する対向車の相対距離を超えるか否か判断し、否定されるときは以降の処理をスキップすると共に、肯定されるときは対向車と自車16との接触の可能性があると判定し、S126に進み、警報作動を実行する。尚、残余の構成は第1実施例と異ならない。
Next, the process proceeds to S122, the contact avoidance support operating distance is calculated by multiplying the calculated contact avoidance support timing by the relative speed, and the process proceeds to S124, where the contact avoidance support operating distance exceeds the relative distance of the oncoming vehicle with respect to the
第3実施例にあっては上記の如く、自車16の周囲に存在する物体を検出する物体検出手段(撮影装置40、レーダ装置42、走行制御部28,S100)と、自車の運動状態を検出する運動状態検出手段(車速センサ50、ヨーレートセンサ48,S102)と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき(S104)、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し(S106)、前記予測された進路が重なる場合(S108)、前記対向車を障害物と認識して自車との接触の可能性を判定する接触可能性判定手段(S110からS124)と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段(S126)とを備えた車両16の接触回避支援装置10において、自車16が右折レーンを走行しているか否か判定する走行レーン判定手段(S112)と、自車が右折レーンを走行していると判定されるとき、前記接触回避支援動作の実行を抑制する接触回避支援動作抑制手段とを備え、前記接触回避支援手段は、自車16および前記対向車が共に右に回避(右折)すると想定して回避量を算出する(S118)と共に、前記算出された回避量に基づいて前記接触回避支援動作の実行を抑制する(S120)、即ち、接触回避支援作動距離を小さく設定することで接触回避支援動作の実行を抑制する如く構成したので、自車16の右折を精度良く予測して抑制することとなって接触回避支援動作が過剰となるのを防止することができる。
In the third embodiment, as described above, the object detection means (the photographing
図8はこの発明の第4実施例に係る車両の接触回避支援装置の動作を示すフロー・チャートである。 FIG. 8 is a flow chart showing the operation of the vehicle contact avoidance assistance device according to the fourth embodiment of the present invention.
第4実施例は第3実施例の変形例であり、図7に示す第3実施例のフロー・チャートと相違する点に焦点をおいて説明すると、S100からS110まで同様の処理を行ってS112に進み、S112で肯定されるときはS112aに進み、自車16の乗員が右折意図を有するか否か判断する。
The fourth embodiment is a modification of the third embodiment, and will be described focusing on the differences from the flowchart of the third embodiment shown in FIG. 7. The same processing from S100 to S110 is performed and S112 is performed. If the result in S112 is affirmative, the program proceeds to S112a, in which it is determined whether the occupant of the
S112aで否定されるときはS114以降に進むと共に、肯定されて自車16の乗員が右折意図を有すると判断されるときはS118に進み、自車16も対向車も共に右に回避(右折)すると想定して図5に示すように右に回避するための回避量を算出し、S120に進み、算出された回避量から図4に示す特性の中、作動抑制時の特性を検索して接触回避支援タイミング(時間)を算出する。尚、S122以降の処理を含む残余の構成は、第3実施例と異ならない。
When the result in S112a is negative, the process proceeds to S114 and the subsequent steps. When the determination is affirmative and it is determined that the occupant of the
第4実施例に係る車両16の接触回避支援装置10にあっては上記の如く、自車16の乗員の右折意図を検出する右折意図検出手段を備えると共に(S112a)、前記接触回避支援動作抑制手段は、右折レーンにあって自車16の乗員の右折意図が検出されたとき、S118以降に進んで接触回避支援動作の実行を抑制する(S118からS120)如く構成したので、第3実施例で延べた効果に加え、自車16の右折を一層精度良く予測して抑制することとなって接触回避支援動作が過剰となるのを一層良く防止することができる。
As described above, the contact
図9はこの発明の第5実施例に係る車両の接触回避支援装置の動作を示すフロー・チャートである。 FIG. 9 is a flowchart showing the operation of the vehicle contact avoidance assistance device according to the fifth embodiment of the present invention.
図2に示す第1実施例のフロー・チャートと相違する点に焦点をおいて説明すると、S200からS210まで第1実施例と同様の処理を行った後、S212に進み、対向車は直進すると想定して図3に示すように左右の回避量をそれぞれ算出し、それらの中の小さい方を選択する。次いでS214に進み、選択された回避量から図4に示す特性の中、通常時の特性を検索して接触回避支援タイミング(時間)を算出し、S216に進み、算出された接触回避支援タイミングに相対速度を乗算して接触回避支援作動距離を算出する。 When focusing on the differences from the flow chart of the first embodiment shown in FIG. 2, after performing the same processing as in the first embodiment from S200 to S210, the process proceeds to S212 and the oncoming vehicle goes straight. Assuming that the left and right avoidance amounts are calculated as shown in FIG. 3, the smaller one is selected. Next, the process proceeds to S214, and the contact avoidance support timing (time) is calculated by searching the characteristic shown in FIG. 4 from the selected avoidance amount, and the process proceeds to S216, where the calculated contact avoidance support timing is set. Multiply the relative speed to calculate the contact avoidance assist working distance.
次いでS218に進み、自車16が交差点あるいはその近傍を走行しているか否か判断する。S218で肯定されるときはS220に進み、自車16も対向車も共に減速して停止すると想定し、図10に示す如く、停止までの必要距離を算出する。次いでS222に進み、S216で算出された接触回避支援作動距離が算出された停止までの必要距離を超えるか否か判断し、肯定されるときはS224に進み、算出された停止までの必要距離を接触回避支援作動距離と置き換える。
Next, in S218, it is determined whether or not the
尚、S222で否定されるときは、より短い距離を採用するためにS224をスキップすると共に、S218で否定されるときは、S220からS224をスキップする。 When the result in S222 is negative, S224 is skipped to adopt a shorter distance, and when the result in S218 is negative, S220 to S224 are skipped.
次いでS226に進み、接触回避支援作動距離が自車16に対する対向車の相対距離を超えるか否か判断し、否定されるときは以降の処理をスキップすると共に、肯定されるときは対向車と自車16との接触の可能性があると判定し、S228に進み、警報作動を実行する。尚、残余の構成は第1実施例と異ならない。
Next, in S226, it is determined whether or not the contact avoidance assist working distance exceeds the relative distance of the oncoming vehicle with respect to the
第5実施例ににあっては上記の如く、自車16の周囲に存在する物体を検出する物体検出手段(撮影装置40、レーダ装置42、走行制御部28,S200)と、自車の運動状態を検出する運動状態検出手段(車速センサ50、ヨーレートセンサ48,S202)と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき(S204)、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し(S206)、前記予測された進路が重なる場合、前記対向車を障害物と認識し(S208からS210)、所定の判定条件に従って自車との接触の可能性を判定する接触可能性判定手段(S212からS226)と、前記接触の可能性があると判定される場合、前記対向車との接触回避を支援する接触回避支援動作を実行する接触回避支援手段(S228)、即ち、接触回避支援作動距離を算出して対向車との相対距離と比較することで対向車との接触の可能性を判定すると共に、接触の可能性があると判定される場合、それとの接触回避を支援する接触回避支援動作を実行する接触回避支援手段(S212からS228)とを備えた車両16の接触回避支援装置10において、前記対向車が直進すると想定して回避量を算出すると共に、前記算出した回避量に基づいて接触回避支援作動距離を算出する接触回避支援作動距離算出手段(S212からS216)と、自車が交差点あるいはその近傍を走行しているか否か判定する走行位置判定手段(S218)と、自車16が交差点あるいはその近傍を走行していると判定されるとき、自車および前記対向車が共に減速して停止すると想定して停止までに必要な停止必要距離を算出する停止必要距離算出手段(S218からS220)と、自車16が交差点あるいはその近傍を走行していると判定されるとき、前記判定条件を変更、即ち、回避量から接触回避支援タイミングを算出して相対速度に乗算することで接触回避支援作動距離を算出する手法(S212からS216)に加え(あるいは代え)、停止までの必要距離を算出することで接触回避支援作動距離を算出する判定条件変更手段とを備え、前記判定条件変更手段は、前記算出された接触回避支援作動距離が前記停止必要距離を超えるとき、前記停止必要距離に基づいて前記判定条件を変更する(S222からS224)如く構成したので、状況に適した接触可能性判断が可能となり、よって接触回避支援動作が過剰となるのを防止することができる。
In the fifth embodiment, as described above, the object detection means (the photographing
図11はこの発明の第6実施例に係る車両の接触回避支援装置の動作を示すフロー・チャートである。 FIG. 11 is a flow chart showing the operation of the vehicle contact avoidance assistance device according to the sixth embodiment of the present invention.
図9に示す第5実施例のフロー・チャートと相違する点に焦点をおいて説明すると、S300からS310まで第5実施例と同様の処理を行った後、S312に進み、対向車は直進すると想定して図3に示すように左右の回避量をそれぞれ算出して小さい方を選択する。次いでS314に進み、選択された回避量から図4に示す特性の中、通常時の特性を検索して接触回避支援タイミング(時間)を算出し、S316に進み、算出された接触回避支援タイミングに相対速度を乗算して接触回避支援作動距離を算出する。 When focusing on the differences from the flow chart of the fifth embodiment shown in FIG. 9, after performing the same processing as the fifth embodiment from S300 to S310, the process proceeds to S312 and the oncoming vehicle goes straight. Assuming that, as shown in FIG. 3, the left and right avoidance amounts are calculated and the smaller one is selected. Next, the process proceeds to S 314, and the contact avoidance support timing (time) is calculated by searching the characteristics shown in FIG. 4 from the selected avoidance amount, and the process proceeds to S 316, where the calculated contact avoidance support timing is set. Multiply the relative speed to calculate the contact avoidance assist working distance.
次いでS318に進み、自車16が右折レーンを走行しているか否か判断し、肯定されるときはS320に進み、自車16も対向車も共に減速して停止すると想定し、図10に示す如く、停止までの必要距離を算出する。次いでS322に進み、S316で算出された接触回避支援作動距離が算出された停止までの必要距離を超えるか否か判断し、肯定されるときはS324に進み、算出された停止までの必要距離を接触回避支援作動距離と置き換える。
Next, the process proceeds to S318, where it is determined whether or not the
尚、S322で否定されるときは、より短い距離を採用するためにS324をスキップすると共に、S318で否定されるときはS320からS324をスキップする。 When the result in S322 is negative, S324 is skipped to adopt a shorter distance, and when the result in S318 is negative, S320 to S324 are skipped.
次いでS326に進み、接触回避支援作動距離が自車16に対する対向車の相対距離を超えるか否か判断し、否定されるときは以降の処理をスキップすると共に、肯定されるときは対向車と自車16との接触の可能性があると判定し、S328に進み、警報作動を実行する。尚、残余の構成は第5実施例と異ならない。
Next, the process proceeds to S326, in which it is determined whether or not the contact avoidance assist working distance exceeds the relative distance of the oncoming vehicle with respect to the
第6実施例ににあっては上記の如く、自車16の周囲に存在する物体を検出する物体検出手段(撮影装置40、レーダ装置42、走行制御部28,S300)と、自車の運動状態を検出する運動状態検出手段(車速センサ50、ヨーレートセンサ48,S302)と、前記物体検出手段と運動状態検出手段の出力に基づいて対向車が検出されるとき(S304)、前記運動状態検出手段の出力に基づいて自車の進路を予測すると共に、前記物体検出手段の出力に基づいて前記対向車の進路を予測し(S306)、前記予測された進路が重なる場合、前記対向車を障害物と認識し(S310)、所定の判定条件に従って、即ち、接触回避支援作動距離を算出して対向車との接触の可能性を判定する接触可能性判定手段(S312からS326)と、接触の可能性があると判定される場合、それとの接触回避を支援する接触回避支援動作を実行する接触回避支援手段(S328)とを備えた車両16の接触回避支援装置10において、前記対向車が直進すると想定して回避量を算出すると共に、前記算出した回避量に基づいて接触回避支援作動距離を算出する接触回避支援作動距離算出手段(S312からS316)と、自車が右折レーンを走行しているか否か判定する走行レーン判定手段(S318)と、自車16が右折レーンを走行していると判定されるとき、自車および前記対向車が共に減速して停止すると想定して停止までに必要な停止必要距離を算出する停止必要距離算出手段(S318からS320)と、自車16が右折レーンを走行していると判定されるとき、前記判定条件を変更、即ち、回避量から接触回避支援タイミングを算出して相対速度に乗算することで接触回避支援作動距離を算出する手法(S312からS316)に加え(あるいは代え)、停止までの必要距離を算出することで接触回避支援作動距離を算出することで判定条件を変更する判定条件変更手段とを備え、前記判定条件変更手段は、前記算出された接触回避支援作動距離が前記停止必要距離を超えるとき、前記停止必要距離に基づいて前記判定条件を変更する(S322からS324)如く構成したので、状況に適した接触可能性判断が可能となり、よって接触回避支援動作が過剰となるのを防止することができる。
In the sixth embodiment, as described above, the object detection means (the photographing
図12はこの発明の第7実施例に係る車両の接触回避支援装置の動作を示すフロー・チャートである。 FIG. 12 is a flowchart showing the operation of the vehicle contact avoidance assistance device according to the seventh embodiment of the present invention.
第7実施例は第6実施例の変形例であり、図9に示す第5実施例のフロー・チャートと相違する点に焦点をおいて説明すると、S200からS216まで同様の処理を行ってS218に進み、自車16が交差点あるいはその近傍を走行しているか判断し、肯定されるときはS218aに進み、自車16の乗員が右折意図を有するか否か判断する。
The seventh embodiment is a modification of the sixth embodiment, and will be described focusing on differences from the flow chart of the fifth embodiment shown in FIG. 9. The same processing from S200 to S216 is performed and S218 is performed. In step S218a, it is determined whether the
S218aで肯定されて自車16の乗員が右折意図を有すると判断されるときはS220に進み、停止までの必要距離を算出し、S222に進み、接触回避支援作動距離が算出された停止までの必要距離を超えるか否か判断し、肯定されるときはS224に進み、算出された停止までの必要距離を接触回避支援作動距離と置き換える。尚、S226以降の処理を含む残余の構成は、第5実施例と異ならない。
When it is affirmed in S218a and it is determined that the occupant of the
第7実施例に係る車両の接触回避支援装置にあっては上記の如く、自車16の乗員の右折意図を検出する右折意図検出手段(S218a)を備えると共に、前記判定条件変更手段は、交差点あるいはその近傍にあって自車16の乗員の右折意図が検出されたとき、S220以降に進んで判定条件を変更する(S220からS224)如く構成したので、上記した効果に加え、自車の右折を一層精度良く予測することとなり、よって接触回避支援動作が過剰となるのを一層良く防止することができる。
As described above, the vehicle contact avoidance assistance device according to the seventh embodiment includes the right turn intention detection means (S218a) for detecting the right turn intention of the occupant of the
尚、図示は省略するが、第6実施例を変形し、図11フロー・チャートにおいてS320の前に自車16の乗員の右折意図を検出するステップを設け、右折レーンを走行すると共に自車16の乗員の右折意図が検出されたとき、S320以降に進んで判定条件を変更するように構成しても良く、それによって第7実施例と同様、自車の右折を一層精度良く予測することとなり、よって接触回避支援動作が過剰となるのを一層良く防止することができる。
Although not shown in the drawings, the sixth embodiment is modified to provide a step of detecting the right turn intention of the occupant of the
尚、上記において、警報作動は、警報装置24を作動させて音声または視覚による警報を実行するように構成したが、ブレーキ制御部34、EPS制御部36、シートベルト制御部38の一つまたはそれ以上を動作させても良い。
In the above description, the alarm operation is configured such that the
ブレーキ制御部34の場合、ブレーキアクチュエータ20を動作させる自動ブレーキによる車両の減速である。EPS制御部36の場合、EPSアクチュエータ22を動作させるステアリング(操舵)トルク付与であり、シートベルト制御部38の場合、シートベルト駆動機構26を介してシートベルトを引き込ませることによる警報である。尚、ナビゲーション装置54の表示部54eを用いることも可能である。
In the case of the
また、交差点あるいはその近傍、もしくは右折レーンを走行しているか、もしくは右折レーンを走行しているか否かをナビゲーション装置54のナビゲーション処理部54bにアクセスして地図データ記憶部54cに記憶される地図(道路)データを読み出して判断するようにしたが、撮影装置40の画像処理部40bの出力から判断しても良い。
In addition, a map stored in the map data storage unit 54c by accessing the
また、乗員の右折意図をウインカスイッチ52の出力から判断したが、車室内にカメラを配置して乗員の顔や視線を検出し、乗員が右方向を向いている場合、右折意図があると判断しても良い。
In addition, although the occupant's intention to turn right is determined from the output of the
10 車両の接触回避支援装置、16 車両(自車)、18 制御装置、20 ブレーキアクチュエータ、24 警報装置、26 シートベルト駆動機構、28 走行制御部、40 撮影装置、42 レーダ装置、48 ヨーレートセンサ、50 車速センサ、52 ウインカスイッチ、54 ナビゲーション装置、54a 現在位置検出部、54b ナビゲーション処理部、54c 地図データ記憶部
DESCRIPTION OF
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008009089A JP5113539B2 (en) | 2008-01-18 | 2008-01-18 | Vehicle contact avoidance support device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008009089A JP5113539B2 (en) | 2008-01-18 | 2008-01-18 | Vehicle contact avoidance support device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009166764A JP2009166764A (en) | 2009-07-30 |
| JP5113539B2 true JP5113539B2 (en) | 2013-01-09 |
Family
ID=40968455
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008009089A Active JP5113539B2 (en) | 2008-01-18 | 2008-01-18 | Vehicle contact avoidance support device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5113539B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6961995B2 (en) * | 2017-05-12 | 2021-11-05 | トヨタ自動車株式会社 | Driving support device |
| JP7036358B2 (en) * | 2017-06-20 | 2022-03-15 | ジオテクノロジーズ株式会社 | Map data structure, transmitter, and driving support device |
| JP6740969B2 (en) | 2017-07-11 | 2020-08-19 | 株式会社デンソー | Braking assistance device and braking assistance control method in vehicle |
| JP7255240B2 (en) * | 2019-03-06 | 2023-04-11 | 株式会社デンソー | Driving support device |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0524518A (en) * | 1991-07-26 | 1993-02-02 | Mazda Motor Corp | Automatic braking device of vehicle |
| JP3154749B2 (en) * | 1991-07-26 | 2001-04-09 | マツダ株式会社 | Automatic vehicle braking system |
| JP4211327B2 (en) * | 2002-08-29 | 2009-01-21 | 日産自動車株式会社 | Driving safety support device |
| JP4055656B2 (en) * | 2003-05-30 | 2008-03-05 | トヨタ自動車株式会社 | Collision prediction device |
| JP2006306270A (en) * | 2005-04-28 | 2006-11-09 | Nissan Motor Co Ltd | Collision control device for vehicle |
-
2008
- 2008-01-18 JP JP2008009089A patent/JP5113539B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009166764A (en) | 2009-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6677822B2 (en) | Vehicle control device | |
| JP6583061B2 (en) | Automatic operation control device | |
| JP6555067B2 (en) | Lane change support device | |
| JP6269606B2 (en) | Vehicle control device | |
| JP4506568B2 (en) | Parking assistance device | |
| JP4161938B2 (en) | Travel control device | |
| JP5888407B2 (en) | Driving assistance device | |
| JP2018203119A (en) | Steering assist device | |
| WO2012032624A1 (en) | Degree-of-danger calculation apparatus | |
| CN111226267A (en) | Driving control method and driving control device for driving support vehicle | |
| JP6421716B2 (en) | Vehicle driving support control device | |
| JP4532569B2 (en) | Vehicle driving support device | |
| JP2009137562A (en) | Vehicle control device, vehicle control method, and computer program | |
| JP4907408B2 (en) | Vehicle travel safety device | |
| JP2007190977A (en) | Vehicle control device | |
| JP2006301842A (en) | Driving support device of vehicle | |
| JP2017189989A (en) | Lane keep apparatus | |
| JP6970215B2 (en) | Vehicle control device, vehicle with it, and control method | |
| JP5113539B2 (en) | Vehicle contact avoidance support device | |
| JP4476781B2 (en) | Vehicle travel safety device | |
| JP4956504B2 (en) | Vehicle travel safety device | |
| JP2021094908A (en) | Travel support system and control method for the same | |
| JP6524878B2 (en) | Lane change support device | |
| JP4818762B2 (en) | Driving assistance device | |
| JP5016503B2 (en) | Vehicle contact avoidance support device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120711 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120904 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121003 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5113539 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |