JP5014919B2 - ブレーキ制御装置 - Google Patents
ブレーキ制御装置 Download PDFInfo
- Publication number
- JP5014919B2 JP5014919B2 JP2007212523A JP2007212523A JP5014919B2 JP 5014919 B2 JP5014919 B2 JP 5014919B2 JP 2007212523 A JP2007212523 A JP 2007212523A JP 2007212523 A JP2007212523 A JP 2007212523A JP 5014919 B2 JP5014919 B2 JP 5014919B2
- Authority
- JP
- Japan
- Prior art keywords
- brake
- control unit
- control device
- pressure
- master
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/665—Electrical control in fluid-pressure brake systems the systems being specially adapted for transferring two or more command signals, e.g. railway systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/745—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on a hydraulic system, e.g. a master cylinder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/34—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition
- B60T8/44—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition co-operating with a power-assist booster means associated with a master cylinder for controlling the release and reapplication of brake pressure through an interaction with the power assist device, i.e. open systems
- B60T8/441—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition co-operating with a power-assist booster means associated with a master cylinder for controlling the release and reapplication of brake pressure through an interaction with the power assist device, i.e. open systems using hydraulic boosters
- B60T8/442—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition co-operating with a power-assist booster means associated with a master cylinder for controlling the release and reapplication of brake pressure through an interaction with the power assist device, i.e. open systems using hydraulic boosters the booster being a fluid return pump, e.g. in combination with a brake pedal force booster
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/34—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition
- B60T8/48—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition connecting the brake actuator to an alternative or additional source of fluid pressure, e.g. traction control systems
- B60T8/4809—Traction control, stability control, using both the wheel brakes and other automatic braking systems
- B60T8/4827—Traction control, stability control, using both the wheel brakes and other automatic braking systems in hydraulic brake systems
- B60T8/4863—Traction control, stability control, using both the wheel brakes and other automatic braking systems in hydraulic brake systems closed systems
- B60T8/4872—Traction control, stability control, using both the wheel brakes and other automatic braking systems in hydraulic brake systems closed systems pump-back systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
Description
図1は、本実施例1のブレーキ制御装置1の全体構成を示す。FL輪は左前輪、FR輪は右前輪、RL輪は左後輪、RR輪は右後輪である。また、矢印付きの破線は信号線であり、矢印の向きによって信号の流れを表す。
以下、ホイル圧制御機構3の油圧回路構成を説明する。
通常制御時には、マスタシリンダ2の作動液がブレーキ回路10,20を介して各ホイルシリンダ4a〜4dに供給され、ブレーキ力が発生する。
運転者がブレーキペダルを踏み込むと、マスタ圧が発生する。通常、倍力システムでは、ブレーキペダルの軸力(インプットロッド6の推力に相当)を増幅する機構(マスタ圧制御機構5やマスタ圧制御装置8に相当)を備えることで高いマスタ圧を発生させる。しかし、上記機構が故障した場合は、マスタ圧自体を高くすることができなくなる。
アウト側ゲート弁11は、電磁吸引力を発生するコイルと、この電磁吸引力に応じて作動し開弁量を調節する可動子と、ブレーキ回路10kおよびブレーキ回路10が接続されたバルブボディから構成されている。
アウト側ゲート弁11を上記のように制御している間は、基本的にイン側ゲート弁17を開弁してポンプP1を駆動させる。ポンプP1はモータMにより駆動されることから、例えば、マスタ圧Pmcに応じて設定される倍力されたホイル圧Pwcを供給可能な吐出圧を実現する最低回転数等を設定し、その最低回転数になるようにモータMを駆動する。すると、ポンプP1から必要な液圧が確保されるため、ホイル圧Pwcを所望の液圧に制御することができる。
以下、マスタ圧制御機構5の構成と動作について説明する。
駆動モータ50は三相DCブラシレスモータであり、マスタ圧制御装置8の制御指令に基づき供給される電力によって動作し、所望の回転トルクを発生する。
次に、マスタ圧制御機構5とマスタ圧制御装置8による、インプットロッド6の推力の増幅作用について説明する。
Pmc=(FIR+K×△x)/AIR=(FPP−K×△x)/APP …(1)
ここで、圧力平衡式(1)における各要素は、以下のとおりである。
Pmc:プライマリ液室2dの液圧(マスタ圧)、
FIR :インプットロッド6の推力、
FPP :プライマリピストン2bの推力、
AIR :インプットロッド6の受圧面積、
APP :プライマリピストン2bの受圧面積、
K :バネ6d、6eのバネ定数、
Δx:インプットロッド6とプライマリピストン2bとの相対変位量。
一方、倍力比αは、下記(2)式のように表わされる。
α=PM/C×(APP+AIR)/FIR …(2)
よって、この(2)式に上記(1)式のPM/Cを代入すると、倍力比αは下記(3)式のようになる。
α=(1+K×Δx/FIR)×(AIR+APP)/AIR …(3)
図2は、マスタ圧制御装置8の電気回路構成の一例を示す。図2で太線枠8内は、マスタ圧制御装置8の電気回路を示し、点線枠5内は、マスタ圧制御機構5側の電気回路を示す。太線枠9はホイル圧制御装置9(の電気回路)であり、例えばVDC等のECUを示す。
CPU80でマスタ圧制御機構5の故障を検出した場合、または監視用制御回路83でCPU80の故障を検出した場合、または信号線Lの断線やショート等が発生した場合には、信号I/F回路86fおよび信号線Lを介してホイル圧制御装置9にバックアップ要求信号を出力し、ホイル圧制御装置9をバックアップ制御モードに移行させて、バックアップ制御を行わせる。
次に、ホイル圧制御装置9がバックアップ要求信号を受信したときに実行する制御について説明する。図3は、ホイル圧制御装置9の制御モードに関するフローチャートの一例を示す。
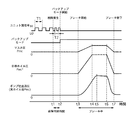
図4、図5は、故障発生時のバックアップ制御モードがブレーキ力に与える影響を示すタイムチャートである。ユニット間信号(信号I/F回路86fから出力される、信号線Lの電気信号)、バックアップ要求信号、マスタ圧Pmc、目標ホイル圧Pwc*、およびポンプ吐出液圧(実ホイル圧Pwc)の時間変化を示す。
以下、実施例1から把握される、本発明のブレーキ制御装置1が有する効果を列挙する。
なお、第1のコントロールユニット(マスタ圧制御装置8)だけでなく、または第1のコントロールユニット(マスタ圧制御装置8)に代えて、第2のコントロールユニット(ホイル圧制御装置9)に不揮発性メモリ(記憶回路85)を設け、故障情報をこれに保持することとしてもよい。
これにより、上記(2)(3)の作用効果を確実に得ることができる。
図6は、本実施例2のマスタ圧制御装置8の電気回路構成を示す。実施例2では、マスタ圧制御装置8とホイル圧制御装置9とを結ぶ信号線Lの形態が、実施例1と異なる。その他の構成は実施例1と同様である。なお、実施例1と共通する部分については同一の符号を付して説明を省略する。
本実施例2のように構成された通信手段を有する場合、マスタ圧制御装置8が外部制御装置から車両情報や制御信号を受信するとともに、マスタ圧制御機構5で発生させるマスタ圧Pmcまたはブレーキ力を外部制御装置へ送信することで、他の外部制御装置と協調した倍力可変制御や自動ブレーキ機能を実現することもできる。
実施例2のホイル圧制御装置9の制御フローは、実施例1(図3)と同様である。ただし、ステップS1では、マスタ圧制御装置8からCAN通信を介してバックアップ要求信号を受信したか否かにより、バックアップ制御要求の有無を判断する。
(9)倍力機構状態送信部(CAN通信I/F回路86g)は第1のコントロールユニット(マスタ圧制御装置8)に設けられ、第1のコントロールユニット(マスタ圧制御装置8)は、通信線(信号線L1,L2)を介して第2のコントロールユニット(ホイル圧制御装置9)に対し、倍力機構(マスタ圧制御機構5)および/または第1のコントロールユニット(マスタ圧制御装置8)の状態として故障情報をCAN通信(その他のシリアル通信またはフレックス・レイ通信)し、第2のコントロールユニット(ホイル圧制御装置9)は、上記故障情報を受信したときは、液圧制御部(ホイル圧制御機構3)を作動させてホイルシリンダ4a〜4d内を加圧するバックアップ制御を行う。
図7は、本実施例3のマスタ圧制御装置8の電気回路構成を示す。実施例3は、マスタ圧制御装置8とホイル圧制御装置9とを結ぶ信号線Lのセットを複数(2つ)有する点で、実施例2と異なる。具体的には、信号線L1,L2のセットおよびCAN通信I/F回路86gに加えて、信号線L3,L4のセットおよびCAN通信I/F回路86hを有している。これらの信号線L1〜L4は、実施例1,2の信号線と同様に使用できる。その他の構成は実施例2と同様である。
実施例3のホイル圧制御装置9の制御フローは、実施例2(図3)と同様である。S1でバックアップ制御要求を判断する方法として、信号線L1,L2と信号線L3,L4のどちらか一方のセットを介してバックアップ制御要求を受信した(通信不能もしくは通常時と異なる信号となった)場合、または信号線L1,L2と信号線L3,L4の双方でバックアップ制御要求を受信した場合、とする。
(10)通信線を複数(信号線L1,L2と信号線L3,L4)有し、少なくとも1つの通信線(信号線L1,L2または信号線L3,L4)が通信異常であっても第1のコントロールユニット(マスタ圧制御装置8)により倍力機構(マスタ圧制御機構5)を作動させてホイルシリンダ圧力Pwcを制御する。
以上、本発明を実施するための最良の形態を、実施例1〜4に基づいて説明してきたが、本発明の具体的な構成は実施例1〜4に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。
2 マスタシリンダ
3 ホイル圧制御機構
3a、3b マスタ圧センサ
4a〜4d ホイルシリンダ
5 マスタ圧制御機構
7a、7b ブレーキ操作量検出装置(変位センサ)
8 マスタ圧制御装置
9 ホイル圧制御装置
11,21 アウト側ゲート弁
17,27 イン側ゲート弁
50 駆動モータ
80 CPU
83 監視用制御回路
85 記憶回路
86f 信号インターフェイス回路
86g、86h CAN通信インターフェイス回路
BP ブレーキペダル
L 信号線
P ポンプ
Claims (9)
- 運転者のブレーキ操作により作動するマスタシリンダと、
運転者のブレーキ操作量をブレーキペダルのブレーキストロークによって検出するストロークセンサと、
運転者のブレーキ操作量に応じて前記マスタシリンダを作動させてホイルシリンダ内の圧力を加圧可能な倍力機構と、
前記ストロークセンサが接続され、正常時に前記ストロークセンサの検出値に応じて前記マスタシリンダを加圧すべく前記倍力機構の作動を制御する第1のコントロールユニットと、
前記マスタシリンダの圧力を検出するマスタシリンダ圧力センサと、
前記倍力機構とは別に設けられ、前記ホイルシリンダ内の圧力を加圧可能な液圧源を有する液圧制御部と、
前記マスタシリンダ圧力センサが接続され、前記液圧制御部の作動を制御する第2のコントロールユニットと、
前記第1のコントロールユニットと前記第2のコントロールユニットとを結び、前記倍力機構または前記第1のコントロールユニットの状態を通信する通信線と、を備え、
前記第1のコントロールユニットは、前記第1および第2のコントロールユニットが起動している間であって前記倍力機構の作動時および非作動時に、前記倍力機構または前記第1のコントロールユニットの状態として故障情報を前記通信線を介して送信する倍力機構状態送信部を備え、
前記第2のコントロールユニットは、前記故障情報を受信したときに、前記マスタシリンダ圧力センサの信号入力に基づいて運転者のブレーキ操作量を検出し、該検出したブレーキ操作量に基づいて前記液圧制御部を作動させて前記ホイルシリンダ内を加圧するバックアップ制御を行い、
前記第1または第2のコントロールユニットは、不揮発性メモリを有し、前記故障情報は前記不揮発性メモリに記憶され、ブレーキ操作中および非操作中において前記故障情報が保持されているブレーキ制御装置。 - 前記倍力機構は、
ブレーキペダルと連動して移動するインプットロッドと、
前記マスタシリンダのピストンを変位させる駆動モータと、を有し、
前記インプットロッドは、前記駆動モータが停止した状態でも前記マスタシリンダのピストンを変位させて前記マスタシリンダを作動させることを特徴とする請求項1に記載のブレーキ制御装置。 - 前記液圧制御部は、
前記液圧源として前記マスタシリンダからブレーキ液を吸入するポンプと、
前記マスタシリンダと前記ホイルシリンダとの間に設けられ、閉弁方向に付勢されたとき前記ホイルシリンダから前記マスタシリンダ側にブレーキ液の排出を制限するゲート弁と、を有し、
前記バックアップ制御は、前記ゲート弁を閉弁方向に付勢した状態で前記ポンプによって前記ホイルシリンダをポンプアップ加圧することを特徴とする請求項1または2に記載のブレーキ制御装置。 - 前記通信線はCAN通信その他のシリアル通信またはフレックス・レイ通信の通信線であることを特徴とする請求項1乃至3のいずれかに記載のブレーキ制御装置。
- 前記第1のコントロールユニットは前記通信線の通信異常を検出するとともに、前記通信異常時には前記液圧制御部により前記バックアップ制御を行うことを特徴とする請求項1乃至4のいずれかに記載のブレーキ制御装置。
- 前記通信線は複数設けられ、少なくとも1つの前記通信線が通信異常であっても前記第1のコントロールユニットは、前記倍力機構を作動させて前記ホイルシリンダ圧力を制御することを特徴とする請求項1乃至5のいずれかに記載のブレーキ制御装置。
- 前記通信線は2つ設けられ、前記第2のコントロールユニットは、前記2つの通信線から前記故障情報を受信したときに、前記バックアップ制御を行うことを特徴とする請求項1乃至5のいずれかに記載のブレーキ制御装置。
- 前記第1のコントロールユニットは、前記倍力機構と前記第1のコントロールユニットの正常状態を示す第1の信号状態に通信線を保持し、前記倍力機構または前記第1のコントロールユニットに故障が検出された場合、前記第1の信号状態から前記倍力機構と前記第1のコントロールユニットの少なくとも一方における異常状態の存在を示す第2の信号状態に通信線の状態を切り替えるよう構成されていることを特徴とする請求項1乃至7のいずれかに記載のブレーキ制御装置。
- 前記第1のコントロールユニットと前記第2のコントロールユニットのうちの一方のコントロールユニットは、前記通信線を介して送られる周期的な電気信号を連続的に生成して、前記通信線を前記第1の信号状態に連続的に保持するよう構成されていることを特徴とする請求項8に記載のブレーキ制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007212523A JP5014919B2 (ja) | 2007-08-17 | 2007-08-17 | ブレーキ制御装置 |
| US12/188,938 US8348352B2 (en) | 2007-08-17 | 2008-08-08 | Brake control apparatus and method |
| DE102008037666.3A DE102008037666B4 (de) | 2007-08-17 | 2008-08-14 | Bremsregelvorrichtung |
| CN200810210936.1A CN101367378B (zh) | 2007-08-17 | 2008-08-15 | 制动控制装置和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007212523A JP5014919B2 (ja) | 2007-08-17 | 2007-08-17 | ブレーキ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009045982A JP2009045982A (ja) | 2009-03-05 |
| JP2009045982A5 JP2009045982A5 (ja) | 2010-09-16 |
| JP5014919B2 true JP5014919B2 (ja) | 2012-08-29 |
Family
ID=40299289
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007212523A Active JP5014919B2 (ja) | 2007-08-17 | 2007-08-17 | ブレーキ制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8348352B2 (ja) |
| JP (1) | JP5014919B2 (ja) |
| CN (1) | CN101367378B (ja) |
| DE (1) | DE102008037666B4 (ja) |
Families Citing this family (83)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE502006008526D1 (de) * | 2005-10-12 | 2011-01-27 | Continental Teves Ag & Co Ohg | Bremsanlage für kraftfahrzeuge |
| DE102009000781A1 (de) * | 2009-02-11 | 2010-08-12 | Robert Bosch Gmbh | Verfahren zum Betrieb einer hydraulischen, eine Blockierschutzregeleinrichtung aufweisenden Fahrzeugbremsanlage |
| JP2010235018A (ja) * | 2009-03-31 | 2010-10-21 | Hitachi Automotive Systems Ltd | 車両制動システム及びマスタシリンダ |
| JP5050015B2 (ja) | 2009-07-30 | 2012-10-17 | 日立オートモティブシステムズ株式会社 | ブレーキ制御システム |
| US8843284B2 (en) * | 2009-08-14 | 2014-09-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for controlling manual transmissions |
| DE102009028770A1 (de) * | 2009-08-21 | 2011-02-24 | Robert Bosch Gmbh | Verfahren zur Betätigung einer hydraulischen Fahrzeugbremsanlage |
| JP5439108B2 (ja) * | 2009-09-30 | 2014-03-12 | 株式会社東芝 | 二次電池装置及び車両 |
| JP5241667B2 (ja) * | 2009-09-30 | 2013-07-17 | 日立オートモティブシステムズ株式会社 | ブレーキ制御システム |
| US20110160971A1 (en) * | 2010-02-09 | 2011-06-30 | Dale Scott Crombez | Electro-Hydraulic Brake Brake-By-Wire System and Method |
| US9002608B2 (en) * | 2010-02-09 | 2015-04-07 | Ford Global Technologies, Llc | Electro-hydraulic brake-by-wire system and method |
| DE202010017605U1 (de) * | 2010-02-15 | 2012-10-08 | Robert Bosch Gmbh | Bremskraftverstärker sowie Verfahren und Vorrichtung zu dessen Betrieb |
| JP5582289B2 (ja) * | 2010-03-03 | 2014-09-03 | 日立オートモティブシステムズ株式会社 | ブレーキ装置 |
| JP5672430B2 (ja) * | 2010-03-31 | 2015-02-18 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| FR2958903B1 (fr) * | 2010-04-14 | 2012-08-17 | Bosch Gmbh Robert | Ensemble hydraulique de freinage d'un vehicule comprenant un capteur de niveau de fluide hydraulique. |
| JP2011230528A (ja) * | 2010-04-23 | 2011-11-17 | Nissan Motor Co Ltd | 複合ブレーキの協調制御装置 |
| JP5569688B2 (ja) * | 2010-09-29 | 2014-08-13 | 日立オートモティブシステムズ株式会社 | ブレーキ装置 |
| DE102011084206A1 (de) * | 2010-10-12 | 2012-04-12 | Continental Teves Ag & Co. Ohg | Bremsanlage für Kraftfahrzeuge |
| JP5740905B2 (ja) * | 2010-10-20 | 2015-07-01 | 日産自動車株式会社 | 車両用制動力制御装置 |
| CN101973259B (zh) * | 2010-10-21 | 2013-04-24 | 浙江吉利汽车研究院有限公司 | 一种自动驻车装置 |
| JP2013541462A (ja) | 2010-11-03 | 2013-11-14 | アイピーゲート・アクチェンゲゼルシャフト | 作動装置、特に車両用ブレーキシステムの作動装置 |
| US9145886B2 (en) * | 2011-03-15 | 2015-09-29 | Ford Global Technologies, Llc | Electric vacuum pump backup control system and method |
| DE102011005984A1 (de) * | 2011-03-23 | 2012-09-27 | Robert Bosch Gmbh | Verfahren und System zur Kompensation eines mangelnden Druckaufbaus im Bremssystem eines Fahrzeugs |
| CN103596824B (zh) * | 2011-06-13 | 2016-04-20 | 丰田自动车株式会社 | 液压产生装置以及液压制动系统 |
| KR20130008165A (ko) * | 2011-07-12 | 2013-01-22 | 주식회사 만도 | 통합유압제어장치의 구현을 위한 실링 구조 및 이를 구비하는 통합유압제어장치 |
| US9278679B2 (en) * | 2011-07-15 | 2016-03-08 | Ipgate Ag | Safety circuit for blocking drive of a brake booster |
| US8706358B2 (en) * | 2011-10-21 | 2014-04-22 | Honda Motor Co., Ltd. | Method of controlling braking in a vehicle |
| CN103129551B (zh) * | 2011-11-23 | 2015-04-22 | 联创汽车电子有限公司 | 混合动力车的制动控制系统 |
| DE102011087907A1 (de) * | 2011-12-07 | 2013-06-13 | Continental Teves Ag & Co. Ohg | Verfahren sowie elektronische Einrichtung zur Verbesserung der Verfügbarkeit eines elektromechanischen Aktuators |
| US9664528B2 (en) * | 2012-03-27 | 2017-05-30 | Autoliv Asp, Inc. | Inertial sensor enhancement |
| DE102012211278A1 (de) | 2012-06-29 | 2014-01-02 | Robert Bosch Gmbh | Verfahren zum Betreiben eines rekuperativen Bremssystems eines Fahrzeugs, Steuervorrichtung für ein rekuperatives Bremssystem eines Fahrzeugs und rekuperatives Bremssystem |
| JP2014019266A (ja) * | 2012-07-17 | 2014-02-03 | Hitachi Automotive Systems Ltd | 車両用ブレーキ装置 |
| JP5849030B2 (ja) * | 2012-08-23 | 2016-01-27 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| JP5961513B2 (ja) | 2012-09-28 | 2016-08-02 | 日立オートモティブシステムズ株式会社 | 車両制御装置およびブレーキ制御装置 |
| JP5898035B2 (ja) * | 2012-09-28 | 2016-04-06 | 日立オートモティブシステムズ株式会社 | ディスクブレーキ装置 |
| CN103802813B (zh) * | 2012-11-12 | 2018-11-06 | 博世汽车部件(苏州)有限公司 | 助力器及制动系统 |
| JP6004575B2 (ja) * | 2012-11-13 | 2016-10-12 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| DE102012222978A1 (de) * | 2012-12-12 | 2014-06-12 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Bremssystems eines Fahrzeugs und Steuervorrichtung für ein Bremssystem eines Fahrzeugs |
| JP2014169039A (ja) * | 2013-03-05 | 2014-09-18 | Hitachi Automotive Systems Ltd | ブレーキ制御装置 |
| JP6064762B2 (ja) * | 2013-04-16 | 2017-01-25 | 株式会社デンソー | 車両制御装置 |
| KR101880744B1 (ko) * | 2013-04-23 | 2018-07-23 | 주식회사 만도 | 유압 제어 장치 및 그 유압 제어 방법 |
| JP2015051672A (ja) * | 2013-09-05 | 2015-03-19 | 日立オートモティブシステムズ株式会社 | ブレーキシステム及びブレーキ装置及びブレーキ制御方法 |
| ITTO20131050A1 (it) * | 2013-12-19 | 2015-06-20 | Freni Brembo Spa | Dispositivo attuatore per freni a controllo automatico |
| DE102014210998A1 (de) * | 2014-06-10 | 2015-12-17 | Robert Bosch Gmbh | Hydrauliksteuergerät für zumindest ein Hydraulikaggregat eines Bremssystems und Bremskraftverstärkersteuergerät für einen elektromechanischen Bremskraftverstärker eines Bremssystems |
| US20160001753A1 (en) * | 2014-07-07 | 2016-01-07 | Goodrich Corporation | Apparatus and system for power distribution to brake systems |
| CN104442762B (zh) * | 2014-10-09 | 2017-06-23 | 浙江万向精工有限公司 | 一种基于轮缸减压阀的线控制动系统压力控制方法 |
| US9440632B2 (en) * | 2014-11-05 | 2016-09-13 | Bendix Commercial Vehicle Systems Llc | Method, controller and system for monitoring brake operation |
| DE102015202337A1 (de) | 2015-02-10 | 2016-08-11 | Robert Bosch Gmbh | Steuervorrichtung und Verfahren zum Betreiben eines Bremssystems eines Fahrzeugs |
| CN107074232B (zh) * | 2015-02-27 | 2019-09-17 | 日立汽车系统株式会社 | 制动控制装置 |
| US9539993B2 (en) | 2015-06-11 | 2017-01-10 | Ford Global Technologies, Llc | By-wire fallback braking mode for brake-by-wire systems in vehicles |
| DE102015217531A1 (de) * | 2015-09-14 | 2017-03-16 | Robert Bosch Gmbh | Bremskraftverstärker, Bremseinrichtung |
| DE102015217530A1 (de) * | 2015-09-14 | 2017-03-16 | Robert Bosch Gmbh | Bremskraftverstärker für ein Kraftfahrzeug |
| DE102016209108A1 (de) * | 2015-12-02 | 2017-06-08 | Continental Teves Ag & Co. Ohg | Bremsdrucksteuergerät |
| CN105398440B (zh) * | 2015-12-07 | 2018-09-07 | 宁波拓普智能刹车系统有限公司 | 一种机电磁一体化制动助力装置 |
| DE102017200819A1 (de) * | 2016-02-26 | 2017-08-31 | Continental Teves Ag & Co. Ohg | Verfahren zum Betrieb einer Bremsanlage eines Kraftfahrzeugs und Bremsanlage |
| CN105799683B (zh) * | 2016-02-28 | 2018-05-04 | 商洛学院 | 一种用于车辆的机械电子液压制动系统 |
| US10179583B2 (en) * | 2016-03-29 | 2019-01-15 | Ford Global Technologies, Llc | Vehicle subsystem coordination and control |
| CN106184153A (zh) * | 2016-08-16 | 2016-12-07 | 北京英创汇智科技有限公司 | 一种液压制动系统 |
| US10099670B2 (en) | 2016-12-14 | 2018-10-16 | Robert Bosch Gmbh | Vehicle braking system and method |
| DE102017003654A1 (de) * | 2017-04-13 | 2018-10-18 | Lucas Automotive Gmbh | Hydraulische Kraftfahrzeug-Bremsanlage und Steuergerätesystem hierfür |
| US10343664B2 (en) | 2017-04-28 | 2019-07-09 | Veoneer Us, Inc. | System and method for dynamic braking of motor associated with brake booster subsystem |
| FR3066166B1 (fr) * | 2017-05-09 | 2020-01-17 | Robert Bosch Gmbh | Dispositif de commande d'un systeme de freinage de vehicule |
| DE102017209738A1 (de) * | 2017-06-09 | 2018-12-13 | Robert Bosch Gmbh | Kommunikationssystem für ein hydraulisches Bremssystem |
| DE102017209892A1 (de) * | 2017-06-12 | 2018-12-13 | Robert Bosch Gmbh | Verfahren und Steuervorrichtung zum Ausführen einer Not- und/oder Panikbremsung eines Fahrzeugs |
| JP6747388B2 (ja) * | 2017-06-28 | 2020-08-26 | 株式会社アドヴィックス | 制動制御装置 |
| DE102017114556A1 (de) | 2017-06-29 | 2019-01-03 | Ipgate Ag | Vorrichtung für ein hydraulisches Betätigungssystem |
| DE102017212359A1 (de) * | 2017-07-19 | 2019-01-24 | Robert Bosch Gmbh | Vorrichtung und Verfahren zum Betreiben eines Bremssystems eines Kraftfahrzeugs |
| US10889278B2 (en) * | 2017-12-14 | 2021-01-12 | Bombardier Recreational Products Inc. | Braking system for a vehicle having hand and foot brake levers |
| DE102017223565A1 (de) * | 2017-12-21 | 2019-06-27 | Robert Bosch Gmbh | Verfahren zur Verstärkung der Bremskraft in einer elektronisch schlupfregelbaren Fahrzeugbremsanlage mit elektromechanischer Bremskraftverstärkung |
| DE102018201408A1 (de) * | 2018-01-30 | 2019-08-01 | Robert Bosch Gmbh | Kommunikationsverfahren zwischen einem Bremskraftverstärker eines Fahrzeugs und einem ESP-Steuergerät des Fahrzeugs und Bremssystem |
| CN108189826B (zh) * | 2018-02-06 | 2023-10-27 | 吉林大学 | 适用于制动能量回收的全解耦式机械电子助力制动系统 |
| KR102500083B1 (ko) * | 2018-03-08 | 2023-02-15 | 에이치엘만도 주식회사 | 전자식 브레이크 시스템 및 그 제어방법 |
| US20210046909A1 (en) | 2018-03-28 | 2021-02-18 | Hitachi Automotive Systems, Ltd. | Electric brake system, hydraulic pressure control circuit, and fluid amount control circuit |
| DE102018219516A1 (de) * | 2018-11-15 | 2020-05-20 | Robert Bosch Gmbh | Bremssystem und Verfahren zum Betreiben eines Bremssystems |
| CN109733374B (zh) * | 2018-12-28 | 2023-02-03 | 上海擎度汽车科技有限公司 | 控制器供电系统 |
| KR102643094B1 (ko) * | 2019-04-18 | 2024-03-04 | 현대모비스 주식회사 | 전자식 유압 브레이크 장치 및 그의 제어 방법 |
| JP7342495B2 (ja) * | 2019-07-30 | 2023-09-12 | マツダ株式会社 | 車両制御システム |
| CN110316174B (zh) * | 2019-08-16 | 2023-08-08 | 吉林大学 | 具有踏板力补偿功能的集成式电动助力制动系统 |
| DE102019134466A1 (de) * | 2019-12-16 | 2021-06-17 | Knorr-Bremse Systeme für Nutzfahrzeuge GmbH | Systemarchitektur eines elektronischen Bremssystems |
| KR20210137680A (ko) * | 2020-05-11 | 2021-11-18 | 현대모비스 주식회사 | 차량용 제동장치 및 그 제어방법 |
| CN111605533B (zh) * | 2020-06-01 | 2021-08-13 | 长沙理工大学 | 一种汽车动力系统的工作方法 |
| DE102021119715A1 (de) | 2021-07-29 | 2023-02-02 | Zf Active Safety Gmbh | Verfahren zum Betreiben einer Bremsanlage, Computerprogrammprodukt und Steuergerät |
| DE102021119717A1 (de) * | 2021-07-29 | 2023-02-02 | Zf Active Safety Gmbh | Verfahren zum Betreiben einer Bremsanlage, Computerprogrammprodukt, Steuerschaltung und Steuergerät |
| JP2023093197A (ja) * | 2021-12-22 | 2023-07-04 | 株式会社アドヴィックス | 車両の制動制御装置 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS613058U (ja) | 1984-06-07 | 1986-01-09 | マツダ株式会社 | 自動車の電磁サ−ボブレ−キ装置 |
| DE4022671A1 (de) | 1990-07-17 | 1992-01-23 | Wabco Westinghouse Fahrzeug | Elektronisches bremssystem fuer stassenfahrzeuge |
| JP3438238B2 (ja) * | 1992-09-30 | 2003-08-18 | マツダ株式会社 | 車両の制御装置 |
| DE4310061A1 (de) | 1993-03-27 | 1994-09-29 | Teves Gmbh Alfred | Hydraulische Bremsanlage mit Schlupfregelung |
| US5335301A (en) | 1993-05-05 | 1994-08-02 | Methode Electronics, Inc. | Fiber optic connector with sliding key |
| DE4343314A1 (de) | 1993-12-18 | 1995-06-22 | Bosch Gmbh Robert | Fremdkraftbremsanlage |
| DE4415613C1 (de) * | 1994-05-04 | 1995-04-27 | Daimler Benz Ag | Hydraulische Zweikreis-Bremsanlage für ein Straßenfahrzeug |
| DE19500188B4 (de) | 1995-01-05 | 2006-05-11 | Robert Bosch Gmbh | Schaltungsanordnung für eine Bremsanlage |
| JPH0999829A (ja) * | 1995-10-04 | 1997-04-15 | Nisshinbo Ind Inc | 車輪速補正方法 |
| JP3887852B2 (ja) | 1995-12-20 | 2007-02-28 | 株式会社デンソー | ブレーキ制御装置 |
| DE19644880C1 (de) | 1996-10-29 | 1998-04-02 | Bosch Gmbh Robert | Verfahren und Vorrichtung zum Betreiben einer Bremsanlage eines Fahrzeugs |
| US5709438A (en) | 1996-12-19 | 1998-01-20 | Robert Bosch Technology Corporation | Failed booster back-up braking system |
| JPH10175538A (ja) * | 1996-12-19 | 1998-06-30 | Aisin Seiki Co Ltd | 流体給排装置 |
| DE19703776B4 (de) | 1997-02-01 | 2006-02-16 | Continental Teves Ag & Co. Ohg | Bremsdruckgeber für eine hydraulische Bremsanlage für Kraftfahrzeuge |
| DE19705653B4 (de) * | 1997-02-14 | 2007-05-24 | Continental Teves Ag & Co. Ohg | Hydraulische Bremsanlage |
| JP3971490B2 (ja) | 1997-09-10 | 2007-09-05 | 本田技研工業株式会社 | 車両用制動装置 |
| DE19742988C1 (de) | 1997-09-29 | 1999-01-28 | Siemens Ag | Bremsanlage für ein Kraftfahrzeug |
| DE19807369A1 (de) | 1998-02-21 | 1999-08-26 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung einer Bremsanlage |
| DE19807366A1 (de) | 1998-02-21 | 1999-08-26 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung einer Bremsanlage |
| JP3846523B2 (ja) | 1999-03-02 | 2006-11-15 | トヨタ自動車株式会社 | 車輌の制動力制御装置 |
| DE19937156A1 (de) | 1999-08-06 | 2001-02-08 | Bosch Gmbh Robert | Elektrisch gesteuertes, dezentrales Steuersystem in einem Fahrzeug |
| JP4723706B2 (ja) * | 1999-09-02 | 2011-07-13 | トヨタ自動車株式会社 | 車両用電気制御システム |
| DE10033835B4 (de) | 2000-07-12 | 2013-05-02 | Continental Teves Ag & Co. Ohg | Bremsanlage für ein Kraftfahrzeug sowie Verfahren zu ihrer Steuerung |
| JP4389407B2 (ja) * | 2001-05-11 | 2009-12-24 | トヨタ自動車株式会社 | 液圧源装置 |
| JP4096599B2 (ja) | 2002-04-10 | 2008-06-04 | 株式会社アドヴィックス | 液圧制御装置の液圧測定方法、及び液圧制御装置の健全性評価方法 |
| JP4258280B2 (ja) * | 2003-06-03 | 2009-04-30 | 住友電気工業株式会社 | 自動車の制御装置のバックアップ・システム |
| JP4760246B2 (ja) * | 2004-09-30 | 2011-08-31 | トヨタ自動車株式会社 | 液圧ブレーキ装置 |
| WO2006046318A1 (ja) * | 2004-10-29 | 2006-05-04 | Hitachi, Ltd. | ブレーキ装置およびその制御装置 |
| JP4646738B2 (ja) * | 2005-08-26 | 2011-03-09 | 株式会社アドヴィックス | ブレーキ液圧制御装置 |
| DE102006015905A1 (de) * | 2005-09-15 | 2007-04-19 | Continental Teves Ag & Co. Ohg | Bremssystem für Kraftfahrzeuge |
| US8500213B2 (en) | 2005-09-26 | 2013-08-06 | Hitachi, Ltd. | Electrically Actuated Booster |
| JP4721165B2 (ja) | 2005-11-04 | 2011-07-13 | 日立オートモティブシステムズ株式会社 | ブレーキ装置 |
| JP4822320B2 (ja) * | 2005-11-22 | 2011-11-24 | 油研工業株式会社 | 可変容量形双方向回転ポンプおよび該ポンプを用いた油圧回路 |
| JP2007212523A (ja) | 2006-02-07 | 2007-08-23 | Sumitomo Electric Ind Ltd | 光ケーブル |
-
2007
- 2007-08-17 JP JP2007212523A patent/JP5014919B2/ja active Active
-
2008
- 2008-08-08 US US12/188,938 patent/US8348352B2/en active Active
- 2008-08-14 DE DE102008037666.3A patent/DE102008037666B4/de active Active
- 2008-08-15 CN CN200810210936.1A patent/CN101367378B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101367378B (zh) | 2014-01-08 |
| US20090045672A1 (en) | 2009-02-19 |
| US8348352B2 (en) | 2013-01-08 |
| DE102008037666A1 (de) | 2009-03-05 |
| CN101367378A (zh) | 2009-02-18 |
| DE102008037666B4 (de) | 2021-02-18 |
| JP2009045982A (ja) | 2009-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5014919B2 (ja) | ブレーキ制御装置 | |
| JP5014916B2 (ja) | ブレーキ制御装置 | |
| US9031757B2 (en) | Brake control apparatus | |
| JP5514805B2 (ja) | ブレーキ制御装置 | |
| US10023166B2 (en) | Brake control device | |
| US8360532B2 (en) | Brake control system | |
| JP5241667B2 (ja) | ブレーキ制御システム | |
| JP5096593B2 (ja) | ブレーキ装置 | |
| EP2163445B1 (en) | Brake control system | |
| JP5220827B2 (ja) | 車両用ブレーキ装置 | |
| JP5096987B2 (ja) | ブレーキ倍力装置 | |
| US10005442B2 (en) | Brake control device | |
| US10065622B2 (en) | Vehicle control apparatus and brake control apparatus | |
| JP6849822B2 (ja) | 電動倍力装置およびブレーキ制御装置 | |
| WO2011145673A1 (ja) | ブレーキ装置 | |
| JP2004513816A (ja) | 自動車用電気油圧式ブレーキ装置 | |
| WO2017006631A1 (ja) | ブレーキ制御装置およびブレーキシステム | |
| JP2010018193A (ja) | ブレーキ制御装置 | |
| JP2014097687A (ja) | ブレーキ制御装置 | |
| JP5982885B2 (ja) | 制動制御装置 | |
| JP6299035B2 (ja) | ブレーキ装置の駆動回路 | |
| JP5260721B2 (ja) | ブレーキ制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20090924 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20090924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100802 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120605 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120606 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150615 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5014919 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |