JP4608643B2 - 地震の予知方法、地震の予知システム、地震の予知プログラム及び記録媒体 - Google Patents
地震の予知方法、地震の予知システム、地震の予知プログラム及び記録媒体 Download PDFInfo
- Publication number
- JP4608643B2 JP4608643B2 JP2004009928A JP2004009928A JP4608643B2 JP 4608643 B2 JP4608643 B2 JP 4608643B2 JP 2004009928 A JP2004009928 A JP 2004009928A JP 2004009928 A JP2004009928 A JP 2004009928A JP 4608643 B2 JP4608643 B2 JP 4608643B2
- Authority
- JP
- Japan
- Prior art keywords
- earthquake
- seismic
- time
- amplitude
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 47
- 238000001514 detection method Methods 0.000 claims description 59
- 230000007246 mechanism Effects 0.000 claims description 29
- 238000009825 accumulation Methods 0.000 claims description 21
- 239000000284 extract Substances 0.000 claims description 13
- 238000009499 grossing Methods 0.000 claims description 13
- 230000001186 cumulative effect Effects 0.000 claims description 11
- 230000011664 signaling Effects 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 claims description 4
- 238000012545 processing Methods 0.000 claims description 4
- 230000006378 damage Effects 0.000 claims 3
- 230000008859 change Effects 0.000 description 25
- 230000000737 periodic effect Effects 0.000 description 24
- 230000000694 effects Effects 0.000 description 16
- 230000033001 locomotion Effects 0.000 description 16
- 230000008569 process Effects 0.000 description 12
- 238000009826 distribution Methods 0.000 description 11
- 238000001228 spectrum Methods 0.000 description 8
- 230000007704 transition Effects 0.000 description 7
- 230000010355 oscillation Effects 0.000 description 6
- VEXZGXHMUGYJMC-UHFFFAOYSA-M Chloride anion Chemical compound [Cl-] VEXZGXHMUGYJMC-UHFFFAOYSA-M 0.000 description 5
- 230000002159 abnormal effect Effects 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 3
- 230000002354 daily effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 239000003673 groundwater Substances 0.000 description 3
- 239000002243 precursor Substances 0.000 description 3
- 230000003595 spectral effect Effects 0.000 description 3
- 230000002547 anomalous effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 125000004122 cyclic group Chemical group 0.000 description 2
- 239000010438 granite Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000003203 everyday effect Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000005293 physical law Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000012731 temporal analysis Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000000700 time series analysis Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images









Description
前記地震要素の時系列化手段により得られた地震要素の時系列を地震の各要素c毎にバンドパスフィルターで濾過し任意な地震発生順序mでFcmを得て前記請求項1の振幅位相比較検出手段へ出力するフィルタ出力手段を備えてなる地震の予知装置である。
(34度N、133.75度E、30km) に略等しい。従って、震央の平均値は、図2に示された中国地方の地理的な中心地で、振動の座標原点は固定されていると仮定する。
5.0である。夫々のスケールはグラフの基準値からのオフセット値を示し、上からLATとLON、が200倍、DEPが10倍、INTが2倍、MAGが400倍されている。上方向に負のオフセット値、下方向に正のオフセット値が取られる。従って、LATとLONの正負の600は、夫々34度と133度から、3度に増減に相当する。つまり、-600は緯度(LAT)の場合31度となり、LONは130度となる。又、DEPは、−300の目盛りが0km、INTは、−400が0時間に、MAGは、−600が3.5、+600が6.5となる。
(数2)
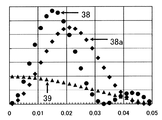
CIm(a)を表示していて、40が60個、41が20個のINTを連続してa個累積(加算)した時系列で、それぞれ40がCIm(60) と41がCIm(20)である。もしそれらを、累積個数の60、20で除算すると、INTの時系列Dcの移動平均となる。従って、41は、増加方向が逆となるが、図5の22aと同じ時系列でもある。周期変動の周期に相当する60イベントを累積した40は、60個の連続した地震を発生するのに費やした日数を表し、41は、20個の連続した地震を発生するのに費やした日数を表している。従って、日数が多くなれば、MAGが3.5以上の地震活動が静穏になった事を意味する。この時、地震活動の静穏は、実施例で選択した中国地方という広範囲な領域にわたって観測されている。
=3.5の大きさの地震活動が多くなる事を示す負の振幅状態を示している。この様な、予兆静穏の後には、図9の24aに示されるように大きな地震が必ず発生している。ただし予兆40fの後の地震は、MAGが4.9の地震である。次に14aと17a、17aと20a、20aと14aの振幅と位相関係から判明する地震現象の予兆静穏も含め異なる予兆について、その予兆の発生要因について概略する。
従って、もし、大地震が発生しそうであれば、それら繰り返し振動に、なにか異常(予兆)が、地震の前に表れると考えられる。
749にある)が観察されるのは、1994/06/06から1994/09/03(m = 743 〜 757)である。更に、その直後のm = 759
(1994/10/14)が40のプロファイルに示される第2段階の2番目の鋭い増加40dに対応している。この位相反転時、要素MAGの振動26aは、少し変動しているが略負の振幅値を持ち、DEPの20aと略同位相となっている。ステップ8によって、これら振幅、位相関係を検出し、観測された阪神・淡路大震災の予兆的静穏は、地震のINTが長くなる事を示す正の振幅値の23aと、地震のDEPは浅くなる事を示す負の振幅値の20aと、地震活動は静穏状態であるが、略MAG=3.5の大きさを持った地震の地震活動が活発になる事を示す負の振幅値の26aである。そして、この予兆静穏は、図9における40プロファイルの第2段階の予兆静穏を確実に抽出している。このようにして抽出した阪神・淡路大震災の予兆的静穏の推移は、阪神・淡路大震災前に出現した地下水の化学物質の含有量(塩化物の含有量)の予兆変化の推移と非常によく一致する。阪神・淡路大震災直後、在庫ペットボトルのミネラルウォータ中の塩化物含有量を製造年月日順序に解析した論文報告によると、ペットボトルの塩化物の含有量は、1993年9月まで変化が無く安定していた。しかし、約3ヶ月を周期とする振動が1993年11月に始まった。(ステップ8で、最初に明らかな予兆的位相変化の兆候を観測したのは、1993年10月である。)1994年8月の始め、その振動はその周期を変え5ヶ月前に到達した高さのレベルに到達した。それから、そのレベルは新たなピークに到達し、そしてまだ振動し続けた。定常的な塩化物の含有量の上昇が、最終的に確立したのは、1994年の10月か11月である。
(34度N、133.75度E、30km)の周りを振動している事を示している。しかしながら、予兆静穏の期間(m=725-760)になると、14aと17aの符合は正を保ち、20aは略負を保つ。このことは、大部分の地震の震源が、地理的な原点から、北東方向の浅い領域(神戸地方)に向かっている。
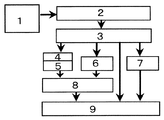
2 地震要素信号化手段
3 地震要素の時系列化手段
4 一次微分出力手段
5 二次微分出力手段
6 フィルタ出力手段
7 時間間隔累積検出手段
8 振幅位相比較検出手段
9 予知手段
Claims (13)
- 対象とする領域に発生した地震から、所定の地震を抽出し、それら地震の震源情報から、震源に関する要素を、緯度(LAT)、経度(LON)と深さ(DEP)、地震と地震の時間間隔(INT)、マグニチュード(MAG)とし、更に、発震機構解の情報とから得る地震の破壊メカニズムに関する要素を、節面1(N1)と節面2(N2)の走行(R)と傾斜角(DEC)、P軸(PA)とT(TA)軸の方位(DIR)と鉛直角(VER)として、
それら地震情報の各要素を表すパラメータをcとして、その選択領域の地震現象を、各要素cの時系列データで表して観測するために、抽出したj番目の地震の各要素cに関する地震情報をDcjとして数値化する地震要素信号化ステップと、
前記地震要素信号化ステップにより抽出されたDcjを、地震の発生順序j(j=1、2、3、・・、m、・・)に基づいて、直接、もしくは、所定の選択処理または平滑化処理を施し、Dc=(Dc1、Dc2、Dc3、・・、Dcm、・・)を得る地震要素の時系列化ステップと、
前記地震要素の時系列ステップで得られたDcの任意な地震発生順序mにおける任意間隔n(n=1,2,3、・・)の差、DcmとDcm−nとの差に比例する量を一次差分値ΔDcm,nとして求める一次微分出力ステップと、
前記一次微分出力ステップから出力された時系列値ΔDcm,nの任意間隔k(k=1、2、・・)での差、即ちΔDcm,nとΔDcm−k,nとの差に比例する量を任意な地震発生順序mでの二次差分値Δ2Dcm,n,kとして求める二次微分出力ステップと、
前記二次微分出力ステップで得られた二次差分値Δ2Dcm,n,kの振幅と位相とを異なる要素間で比較検出し、各要素間の振幅関係と位相関係と地震要素の時系列を出力する振幅位相比較検出ステップと、
前記地震の各要素間の振幅位相比較検出ステップにより検出された各要素間の振幅関係と位相関係で要素が、震源の深さ(DEP)と、地震と地震の時間間隔(INT)の間で位相が反転し、マグニチュード(MAG)の振幅値が、負の値を取るような位相振幅関係を検出した後、INTの位相が、次の半周期後に反転し、INTの振幅値のピークも反転する時点を、地震発生の予測時刻とし、その予測時刻まで地震要素がLAT、LON、DEPである時系列を線形延長した(LAT、LON、DEP)情報を予測震源とし、発震機構解のパラメータやDEPとMAGの位相振幅関係から地震のマグニチュードの程度を予測し、地震の発生時刻、震源、マグニチュードを予知するステップと、
を備えてなる地震の予知方法。 - 請求項1に記載の地震の予知方法において、任意な地震の発生個数をa(a=1、2、・・)とし、前記地震要素信号化ステップと時系列化ステップにより抽出した地震と地震の一つずつ離れた時間間隔を任意な地震発生順序mまで、a個累積しCIm(a)とする時間間隔累積検出ステップを備えてなる地震の予知方法。
- 請求項1ないし請求項2のいずれかに記載の地震の予知方法において、任意な地震の発生個数をa(a=1、2、・・)とし、m番目の地震とm−a番目の地震発生時刻の差をCIm(a)とする時間間隔累積検出ステップを備えてなる地震の予知方法
- 請求項1ないし請求項3のいずれかの地震の予知方法において、地震要素の時系列化ステップにより得られた地震要素の時系列を地震の各要素c毎にバンドパスフィルターで濾過し任意な地震発生順序mでFcmを得て前記振幅位相比較検出ステップへ出力するフィルタ出力手段を備えてなる地震の予知装置。
- 対象とする領域に発生した地震から、所定の地震を抽出し、それら地震の震源情報から、震源に関する要素を、緯度(LAT)、経度(LON)と深さ(DEP)、地震と地震の時間間隔(INT)、マグニチュード(MAG)とし、更に、発震機構解の情報とから得る地震の破壊メカニズムに関する要素を、節面1(N1)と節面2(N2)の走行(R)と傾斜角(DEC)、P軸(PA)とT(TA)軸の方位(DIR)と鉛直角(VER)として、
それら地震情報の各要素を表すパラメータをcとして、その選択領域の地震現象を、各要素cの時系列データで表して観測するために、抽出したj番目の地震の各要素cに関する地震情報をDcjとして数値化する地震要素信号化ステップと、
前記地震要素信号化ステップにより抽出されたDcjを、地震の発生順序j(j=1、2、3、・・、m、・・)に基づいて、直接、もしくは、所定の選択処理または平滑化処理を施し、Dc=(Dc1、Dc2、Dc3、・・、Dcm、・・)を得る地震要素の時系列化ステップと、
前記地震要素の時系列ステップで得られたDcの任意な地震発生順序mにおける任意間隔n(n=1,2,3、・・)の差、DcmとDcm−nとの差に比例する量を一次差分値ΔDcm,nとして求める一次微分出力ステップと、
前記一次微分出力ステップから出力された時系列値ΔDcm,nの任意間隔k(k=1、2、・・)での差、即ちΔDcm,nとΔDcm−k,nとの差に比例する量を任意な地震発生順序mでの二次差分値Δ2Dcm,n,kとして求める二次微分出力ステップと、
前記二次微分出力ステップで得られた二次差分値Δ2Dcm,n,kの振幅と位相とを異なる要素間で比較検出し、各要素間の振幅関係と位相関係と地震要素の時系列を出力する振幅位相比較検出ステップと、
前記地震の各要素間の振幅位相比較検出ステップにより検出された各要素間の振幅関係と位相関係で要素が、震源の深さ(DEP)と、地震と地震の時間間隔(INT)の間で位相が反転し、マグニチュード(MAG)の振幅値が、負の値を取るような位相振幅関係を検出した後、INTの位相が、次の半周期後に反転し、INTの振幅値のピークも反転する時点を、地震発生の予測時刻とし、その予測時刻まで地震要素がLAT、LON、DEPである時系列を線形延長した(LAT、LON、DEP)情報を予測震源とし、発震機構解のパラメータやDEPとMAGの位相振幅関係から地震のマグニチュードの程度を予測し、地震の発生時刻、震源、マグニチュードを予知するステップと、
を備えてなる地震の予知装置。 - 請求項5の地震の予知装置において、任意な地震の発生個数をa(a=1、2、・・)とし、前記地震要素信号化手段と時系列化手段により抽出した地震と地震の一つずつ離れた時間間隔を任意な地震発生順序mまで、a個累積しCIm(a)とする地震の予知装置。
- 請求項5ないし請求項6のいずれかの地震の予知装置において、任意な地震の発生個数をa(a=1、2、・・)とし、m番目の地震とm−a番目の地震発生時刻の差をCIm(a)とする時間間隔累積検出手段を備えてなる地震の予知装置。
- 請求項5ないし請求項7のいずれかの地震の予知装置において、
前記地震要素の時系列化手段により得られた地震要素の時系列を地震の各要素c毎にバンドパスフィルターで濾過し任意な地震発生順序mでFcmを得て前記請求項1の振幅位相比較検出手段へ出力するフィルタ出力手段を備えてなる地震の予知装置。 - 対象とする領域に発生した地震から、所定の地震を抽出し、それら地震の震源情報から、震源に関する要素を、緯度(LAT)、経度(LON)と深さ(DEP)、地震と地震の時間間隔(INT)、マグニチュード(MAG)とし、更に、発震機構解の情報とから得る地震の破壊メカニズムに関する要素を、節面1(N1)と節面2(N2)の走行(R)と傾斜角(DEC)、P軸(PA)とT(TA)軸の方位(DIR)と鉛直角(VER)として、
それら地震情報の各要素を表すパラメータをcとして、その選択領域の地震現象を、各要素cの時系列データで表して観測するために、抽出したj番目の地震の各要素cに関する地震情報をDcjとして数値化する地震要素信号化ステップと、
前記地震要素信号化ステップにより抽出されたDcjを、地震の発生順序j(j=1、2、3、・・、m、・・)に基づいて、直接、もしくは、所定の選択処理または平滑化処理を施し、Dc=(Dc1、Dc2、Dc3、・・、Dcm、・・)を得る地震要素の時系列化ステップと、
前記地震要素の時系列ステップで得られたDcの任意な地震発生順序mにおける任意間隔n(n=1,2,3、・・)の差、DcmとDcm−nとの差に比例する量を一次差分値ΔDcm,nとして求める一次微分出力ステップと、
前記一次微分出力ステップから出力された時系列値ΔDcm,nの任意間隔k(k=1、2、・・)での差、即ちΔDcm,nとΔDcm−k,nとの差に比例する量を任意な地震発生順序mでの二次差分値Δ2Dcm,n,kとして求める二次微分出力ステップと、
前記二次微分出力ステップで得られた二次差分値Δ2Dcm,n,kの振幅と位相とを異なる要素間で比較検出し、各要素間の振幅関係と位相関係と地震要素の時系列を出力する振幅位相比較検出ステップと、
前記地震の各要素間の振幅位相比較検出ステップにより検出された各要素間の振幅関係と位相関係で要素が、震源の深さ(DEP)と、地震と地震の時間間隔(INT)の間で位相が反転し、マグニチュード(MAG)の振幅値が、負の値を取るような位相振幅関係を検出した後、INTの位相が、次の半周期後に反転し、INTの振幅値のピークも反転する時点を、地震発生の予測時刻とし、その予測時刻まで地震要素がLAT、LON、DEPである時系列を線形延長した(LAT、LON、DEP)情報を予測震源とし、発震機構解のパラメータやDEPとMAGの位相振幅関係から地震のマグニチュードの程度を予測し、地震の発生時刻、震源、マグニチュードを予知するステップと、
を備えてなる地震の予知プログラム。 - 請求項9記載の地震の予知プログラムにおいて、任意な地震の発生個数をa(a=1、2、・・)とし、前記地震要素信号化ステップと時系列化ステップにより抽出した地震と地震の一つずつ離れた時間間隔を任意な地震発生順序mまで、a個累積しCIm(a)とする時間間隔累積検出ステップと
を備えてなる地震の予知プログラム。 - 請求項9ないし請求項10のいずれかに記載の地震の予知プログラムにおいて、任意な地震の発生個数をa(a=1、2、・・)とし、m番目の地震とm−a番目の地震発生時刻の差をCIm(a)とする時間間隔累積検出ステップと
を備えてなる地震の予知プログラム。 - 請求項9ないし請求項11のいずれかに記載の地震の予知プログラムにおいて、
地震要素の時系列化ステップにより得られた地震要素の時系列を地震の各要素c毎にバンドパスフィルターで濾過し任意な地震発生順序mでFcmを得て前記振幅位相比較検出ステップへ出力するフィルタ出力手段を備えてなる地震の予知プログラム。 - 請求項9ないし請求項11のいずれかに記載の地震の予知プログラムを記録した記録媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004009928A JP4608643B2 (ja) | 2003-01-17 | 2004-01-19 | 地震の予知方法、地震の予知システム、地震の予知プログラム及び記録媒体 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003010045 | 2003-01-17 | ||
| JP2004009928A JP4608643B2 (ja) | 2003-01-17 | 2004-01-19 | 地震の予知方法、地震の予知システム、地震の予知プログラム及び記録媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004239901A JP2004239901A (ja) | 2004-08-26 |
| JP4608643B2 true JP4608643B2 (ja) | 2011-01-12 |
Family
ID=32964841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004009928A Expired - Lifetime JP4608643B2 (ja) | 2003-01-17 | 2004-01-19 | 地震の予知方法、地震の予知システム、地震の予知プログラム及び記録媒体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4608643B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3318899B1 (en) * | 2015-07-02 | 2022-05-18 | Tokyo Gas Co., Ltd. | Seismic sensor and earthquake determination method |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006103929A1 (ja) * | 2005-03-29 | 2006-10-05 | National University Corporation The University Of Electro-Communications | 地震予知システム、地震予知方法、地震予知プログラム及び地震予知プログラムを記録した記録媒体 |
| JP5903360B2 (ja) * | 2012-09-27 | 2016-04-13 | 日本電信電話株式会社 | 地震予測システム、配信装置、地震予測方法、およびプログラム |
| JP5798545B2 (ja) * | 2012-11-02 | 2015-10-21 | 株式会社武田エンジニアリング・コンサルタント | 大地震と巨大地震の予知方法、予知装置、予知プログラム及び記録媒体 |
| US20160004620A1 (en) * | 2013-05-16 | 2016-01-07 | Hitachi, Ltd. | Detection apparatus, detection method, and recording medium |
| JP6397972B1 (ja) * | 2017-08-09 | 2018-09-26 | 公立大学法人兵庫県立大学 | 地震予測装置、地震予測マップ作成装置、地震予測方法、地震予測マップ作成方法、およびプログラム |
| CN111382908B (zh) * | 2020-03-11 | 2023-08-22 | 中国地震局地球物理研究所 | 一种考虑大震时间相关性的地震随机事件集模拟方法 |
| CN115327620B (zh) * | 2021-05-11 | 2023-07-28 | 中国石油化工股份有限公司 | 微地震联合时差叠加定位方法 |
| CN113589381B (zh) * | 2021-08-09 | 2023-06-27 | 成都理工大学 | 一种基于压缩感知的相位与反射系数同时反演方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2787143B2 (ja) * | 1992-09-10 | 1998-08-13 | 株式会社武田エンジニアリング・コンサルタント | 運動変化検出装置 |
-
2004
- 2004-01-19 JP JP2004009928A patent/JP4608643B2/ja not_active Expired - Lifetime
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2787143B2 (ja) * | 1992-09-10 | 1998-08-13 | 株式会社武田エンジニアリング・コンサルタント | 運動変化検出装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3318899B1 (en) * | 2015-07-02 | 2022-05-18 | Tokyo Gas Co., Ltd. | Seismic sensor and earthquake determination method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004239901A (ja) | 2004-08-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Lévy et al. | Dynamic response of the Chamousset rock column (Western Alps, France) | |
| Akinci et al. | Effect of time dependence on probabilistic seismic-hazard maps and deaggregation for the Central Apennines, Italy | |
| Uchida et al. | A decade of lessons learned from the 2011 Tohoku‐Oki earthquake | |
| Picozzi et al. | Interferometric analysis of strong ground motion for structural health monitoring: the example of the L’Aquila, Italy, seismic sequence of 2009 | |
| Tormann et al. | Size distribution of Parkfield's microearthquakes reflects changes in surface creep rate | |
| JP4608643B2 (ja) | 地震の予知方法、地震の予知システム、地震の予知プログラム及び記録媒体 | |
| Colombero et al. | Integration of ambient seismic noise monitoring, displacement and meteorological measurements to infer the temperature-controlled long-term evolution of a complex prone-to-fall cliff | |
| Mishra et al. | Aftershock investigation in the Andaman–Nicobar Islands of India and its seismotectonic implications | |
| Zollo et al. | Space and time behavior of seismic activity at Mt. Vesuvius volcano, southern Italy | |
| Psimoulis et al. | Detection of ground motions using high-rate GPS time-series | |
| Kanamori | Lessons from the 2004 Sumatra–Andaman earthquake | |
| Park et al. | Temporal variations of repeating low frequency volcanic earthquakes at Ngauruhoe Volcano, New Zealand | |
| JP5798545B2 (ja) | 大地震と巨大地震の予知方法、予知装置、予知プログラム及び記録媒体 | |
| Kumar et al. | Earthquake genesis and earthquake early warning systems: challenges and a way forward | |
| JP4506625B2 (ja) | リアルタイム地震情報を利用した地震動の予測システム | |
| Psimoulis et al. | Long-period surface motion of the multipatch M w9. 0 Tohoku-Oki earthquake | |
| Allgeyer et al. | Modelling the tsunami free oscillations in the Marquesas (French Polynesia) | |
| JP6177628B2 (ja) | 地中地震動を利用した即時地震動予測方法 | |
| Paros et al. | Breakthrough underwater technology holds promise for improved local tsunami warnings | |
| Nikolopoulos et al. | Traces of long-memory in pre-seismic MHz electromagnetic time series-Part1: Investigation through the R/S analysis and time-evolving spectral fractals | |
| Sokolov et al. | Instrumental intensity distribution for the Hector Mine, California, and the Chi-Chi, Taiwan, earthquakes: Comparison of two methods | |
| Macpherson et al. | Using local infrasound to estimate seismic velocity and earthquake magnitudes | |
| Rindraharisaona et al. | Assessing swells in La Réunion Island from terrestrial seismic observations, oceanographic records and offshore wave models | |
| Bevilacqua et al. | Data analysis of the unsteadily accelerating GPS and seismic records at Campi Flegrei caldera from 2000 to 2020 | |
| Chouliaras et al. | Current seismic quiescence in Greece: Implications for seismic hazard |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060810 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090901 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100308 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100805 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100915 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131022 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4608643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |