JP3740281B2 - 通信システム、通信制御装置、その制御方法および記憶媒体 - Google Patents
通信システム、通信制御装置、その制御方法および記憶媒体 Download PDFInfo
- Publication number
- JP3740281B2 JP3740281B2 JP14216198A JP14216198A JP3740281B2 JP 3740281 B2 JP3740281 B2 JP 3740281B2 JP 14216198 A JP14216198 A JP 14216198A JP 14216198 A JP14216198 A JP 14216198A JP 3740281 B2 JP3740281 B2 JP 3740281B2
- Authority
- JP
- Japan
- Prior art keywords
- communication device
- mobile communication
- position information
- level
- command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M3/00—Automatic or semi-automatic exchanges
- H04M3/42—Systems providing special services or facilities to subscribers
- H04M3/42229—Personal communication services, i.e. services related to one subscriber independent of his terminal and/or location
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2242/00—Special services or facilities
- H04M2242/30—Determination of the location of a subscriber
Description
【発明の属する技術分野】
本発明は、移動通信装置の位置情報を用いて呼び出しや通知動作を行うことが可能な通信システム、通信制御装置、その制御方法および記憶媒体に関するものである。
【0002】
【従来の技術】
一般にコンタクトを取りたい相手に直接会いに行く場合には、予め電話をして待っていてもらったり、待ち合わせをしたり、居場所を予想して行ったりすることが考えられる。それには、相手の所在が分かることが重要である。
【0003】
また、従来より、コンタクトをとりたい相手を呼び出す手段としては、電話やポケットぺージャ等、様々なものが提供されている。これらのコンタクト手段は、相手の所在や忙しさに依らない一方的な呼出手段である。
【0004】
また、相手の所在を判定するシステムとして、従来より赤外線を用いた位置センサシステム(例えば、オリベッティ社のアクティブ・バッジ・システム等)が製品として存在する。これは、それぞれ赤外線の発信と受信を行うセンサとバッジ(ネームタグ)とを有して構成されるものであり、センサは、卓上、部屋の壁や天井、廊下の壁や天井等、様々な場所に配置され、バッジは各人が胸につけるようになっている。
【0005】
そして、このシステムは、定期的にバッジからバッジのIDを赤外線を用いて送信し、その赤外線を受信したセンサがシステムに対して受信したバッジIDを送信する。このようにして、バッジ(バッジを付けた人)がどのセンサに反応したかによって、バッジ(バッジを付けた人)の位置を検出する。さらに、このシステムは検出した位置情報をもとに、画面上にバッジ(バッジを付けた人)の所在を表示する機能を備えている。
【0006】
また、人を呼び出す方法として、バッジに付属するスピーカから音を出す(これは、いわゆるポケットページャの機能である)ことができるようになっている。
【0007】
【発明が解決しようとする課題】
しかしながら、相手がその場所にいるかどうかが分からない状態で会いに行ったり、電話をかけたりすると、相手がいなかったり、忙しかったりしてコンタクトをとれないことが多い。このコンタクトの失敗は、作業の効率低下を引き起こすという問題がある。また、近くに来たら会うということもあるが、自分も移動することを考えると、なかなか会う機会に恵まれないことがある。また、近くに会いたい相手がいたとしても、気付かないこともある。
【0008】
そこで本発明は、上記の課題を解決するために提案されたもので、位置センサシステムから得られる人の所在情報をもとに、相手が呼び出し可能かどうかを判定して、無駄な呼び出しを減らし、呼び出し相手の作業に極力割り込みをかけないで呼び出しを行うことができるコンタクト支援システムを提供することを目的とする。
【0009】
さらに、お互いの所在を考慮して、出会うきっかけを提供し、お互いの移動距離を最小限にすることのできるコンタクト支援システムを提供することを目的とする。
【0010】
さらに、上記2つの目的を同時に実現することによって、お互いの移動距離が少なく、適切に相手の状態を考慮した呼び出しを行うことのできるコンタクト支援システムを提供することを目的とする。
【0011】
【課題を解決するための手段】
本発明は、移動通信装置の位置情報を検知する位置検知手段と、上記移動通信装置が相手を呼び出す強さを示すレベルと、通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当手段と、上記移動通信装置の相手を呼び出す強さを示すレベルを参照する参照手段と、上記検知された位置情報と、上記参照された移動通信装置のレベルと上記通信装置のレベルとの差とに基づいて、上記移動通信装置と上記通信装置との通信を許可するかどうかを制御する制御手段とを有することを特徴とする通信システムである。
【0012】
また、本発明は、移動通信装置と通信可能な通信制御装置であって、上記移動通信装置が相手を呼び出す強さを示すレベルと、上記通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当手段と、上記移動通信装置との通信要求を、通信装置から受信する受信手段と、上記移動通信装置の位置を検知する位置検知装置から、上記移動通信装置の位置情報を取得する取得手段と、上記移動通信装置の相手を呼び出す強さを示すレベルを記憶装置から参照する参照手段と、上記取得された位置情報と、上記参照された移動通信装置のレベルと通信装置のレベルとの差とに基づいて、上記通信装置と上記移動通信装置との通信を許可するかどうかを制御する制御手段とを有することを特徴とする通信制御装置である。
【0013】
さらに、本発明は、移動通信装置と通信可能な通信制御装置を制御するための制御方法であって、上記移動通信装置が相手を呼び出す強さを示すレベルと、上記通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当ステップと、上記移動通信装置との通信要求を、通信装置から受信するステップと、上記移動通信装置の位置を検知する位置検知装置から、上記移動通信装置の位置情報を取得するステップと、上記移動通信装置の相手を呼び出す強さを示すレベルを記憶装置から参照する参照ステップと、上記取得された位置情報に応じて、上記通信装置と上記移動通信装置との通信を許可するかどうかを制御するステップとを有することを特徴とする制御方法。
【0014】
そして、本発明は、移動通信装置と通信可能な通信制御装置を制御するための制御方法を、コンピュータに実行させるためのプログラムをコンピュータ読み出し可能に記憶した記憶媒体であって、上記移動通信装置が相手を呼び出す強さを示すレベルと、上記通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当ステップと、上記移動通信装置との通信要求を、通信装置から受信するステップと、上記移動通信装置の位置を検知する位置検知装置から、上記移動通信装置の位置情報を取得するステップと、上記取得された位置情報と、上記参照された移動通信装置のレベルと通信装置のレベルとの差とに基づいて、上記通信装置と上記移動通信装置との通信を許可するかどうかを制御するステップとをコンピュータに実行させるプログラムを記憶したコンピュータ読取可能な記憶媒体。
【0016】
【発明の実施の形態および実施例】
図1は、本発明の実施例に係るコンタクトシステムの構成を示すブロック図であり、図2は、このコンタクト支援システムとセンサシステムとの関係を示すブロック図である。
【0017】
本実施例のコンタクト支援システム100は、図1に示すように、コマンド解析部1と、コマンド作成部2と、通信部3と、表示部4と、呼び出し判定部5と、データベースアクセス部6と、外部記憶装置(判定のための情報)7と、メモリ8とから構成されている。
【0018】
また、本実施例のコンタクト支援システム100は、図2に示すように、センサシステム102および位置情報データベース101とネットワークを介して接続されているものとする。センサシステム102は、図3に示すように、様々な場所に配置されたセンサ302と、人が付けるタグ(バッジ)301によって、タグ301とセンサ302の位置関係を位置情報データベース101のデータを更新することによって管理する。
【0019】
すなわち、タグ301はタグ毎に異なるID(Identification)を赤外線等を用いて周期的に送信するようにし、センサ302はセンサの範囲内にタグ302が存在する場合、その信号を受信する。そして、センサ302は自身のIDと信号を受信したタグ301のIDを位置情報データベース101に送信する。位置情報データベース101では、これらの情報からタグ301が位置するセンサ302の位置を管理する。そして、本実施例のコンタクト支援システム100は、位置情報データベース101のデータを参照して、人の所在情報を得て、それを呼び出し可否の判定に利用する。
【0020】
また、センサシステム102におけるタグ(バッジ)にスピーカが内蔵されており、コマンドによって所望のタグのスピーカから音を出すことができるものとする。この音によって相手を呼び出すものとする。なお、この音による呼び出し部分は、PBX(Private Branch Exchange )を利用した電話呼び出しやポケットページャ呼び出しでも構わない。
【0021】
図1において、コマンド解析部1は、キーボードやマウス等の入力デバイスと接続されており、入力されたコマンドを解析する。コマンド作成部2は、センサシステム102に対して、スピーカから音を出すように指示するコマンドを作成する。
【0022】
通信部3は、ネットワークと接続しており、位置情報データベース101やセンサシステム102と通信を行う。表示部4は、ディスプレイと接続しており、出力内容を表示する。呼び出し判定部5は、相手の位置情報等をもとにして呼び出し可能かどうかの判定を行う。
【0023】
データベースアクセス部6は、位置情報データベース101からデータを参照する。外部記憶装置(判定のための情報)7は、本システムを利用するユーザや場所に関する情報を格納するためのものである。メモリ8は、本システムが一時的にデータを退避するために使用する。
【0024】
なお、以上のコマンド解析部1、コマンド作成部2、および呼び出し判定部5等は、本実施例のシステムに設けられるマイクロコンピユータ(図示せず)の機能の一部として設けられている。また、以下に示す各フローチャートの動作は、このマイクロコンピュータ内のメモリに格納された制御プログラムによって実行されるものである。そして、このようなマイクロコンピュータの制御プログラムは、例えばハードディスク、フロッピディスク、CDROM等の各種記憶媒体に予め格納されたものを、本実施例のシステムリーダ(図示せず)にセットし、マイクロコンピュータに読み取らせるようにすることも可能である。
【0025】
以下、本実施例のシステムの動作を図4、図5のフローチャートを用いて説明する。
【0026】
図4は、本実施例のシステムの開始から終了までの動作において、入力デバイスからコマンド入力があった場合の各処理の流れを示すフローチャートである。本実施例のシステムを起動すると、まず、ステップS1において、システム内部で使用する変数の初期化を行う。そして、ステップS2において、入力デバイスからのコマンド入力があると、コマンド解析部1は入力されたコマンドの解析を行う。
【0027】
次に、ステップS3において、入力されたコマンドが呼び出し相手の指定であるかどうかの検査を行う。この結果が相手の指定であった場合には、ステップS4において、呼び出し相手のユーザIDの検索を行う。なお、ユーザが相手を指定する場合には相手の名前によって指定を行い、その名前からユーザIDを検索するようにする。
【0028】
また、この検索に必要な情報は、外部記憶装置7に格納されており、図6に示すような形式になっている。ユーザ名、ユーザID、レベルの3つ組のリストとして構成されている。レベルは、そのユーザが他人を呼び出す場合における強さを表しており、値が大きいほど、他人を呼び出す力が大きい。本実施例では、このレベルは、0から10までの整数値としている。検索した結果、得られたユーザIDは、メモリ8に格納される。
【0029】
なお、レベルの数値を決める方法には、会社内の上下関係やセールスマンと顧客の関係等、いろいろと考えられる。
【0030】
ステップS3で、呼び出し相手の指定でなかった場合、ステップS5において、入力コマンドが緊急度を指定するものかどうかを検査する。この結果が緊急度指定であった場合には、ステップS6において、指定された緊急度をメモリ8に格納する。本実施例では、この緊急度は0から10までの整数値とし、指定されない場合の初期値は0とする。
【0031】
この緊急度を大きくすることによって、例えば、部下から上司への呼び出しが可能となる。
【0032】
ステップS4またはステップS6が終了すると、ステップS2に戻る。
【0033】
また、ステップS5で、緊急度指定でなかった場合、ステップS7において、入力コマンドが呼び出しの実行を要求するものであるかどうかを検査する。この結果が呼び出し実行の要求であった場合には、ステップS8において、コマンド作成部2により、データベースアクセス部6が位置情報データベース101に対して発行する位置情報データ要求コマンドを作成する。そして、ステップS9において、データベースアクセス部6が通信部3を介して、ステップS8で作成したコマンドを位置情報データベース101に対して送信する。
【0034】
次に、ステップS10において、通信部3は、位置情報データベース101からの位置情報データの受信待ちを行う。なお、通信部3が位置情報データベース101からの位置情報データを受信したときの処理は図5により後述する。
【0035】
ステップS7で、呼び出し実行の要求でなかった場合、入力されたコマンドは終了コマンドであるので、本実施例のシステムは終了する。
【0036】
図5は、本実施例のシステムが位置情報データベース101から位置情報データを受信したときの処理を示すフローチャートである。
【0037】
図5において、通信部3が位置情報データを受信すると、ステップS20において、データベースアクセス部6が受信したデータの解析を行う。この解析の結果得られた位置情報データは、メモリ8に格納される。なお、位置情報データベース101から得られる位置情報は、呼び出し相手のタグ301が位置するセンサ302のセンサIDである。
【0038】
そして、ステップS21において、呼び出し判定部5が呼び出し可能性の度合いを示す呼び出し判定数を計算する。このとき用いる式を図8に示す。図8において、ユーザmが呼び出し側であり、ユーザnが呼び出される側である。各ユーザのレベルは、図6に示す外部記憶装置7に格納されたテーブルをもとに参照される。
【0039】
呼び出す相手のユーザIDは、図4のステップS4でメモリ8に格納されているので、そのユーザIDからテーブルを参照する。また、呼び出し側(ユーザm)のユーザIDは予め設定されていて(システムにログインしたユーザのユーザID)、そのユーザIDからテーブルを参照する。また、緊急度は、図4のステップS6でメモリ8に格納された値を用いる。ユーザnのいる場所のレベルは、ユーザがその場所にいたときの呼び出しにくさを表す数で、本実施例では0から10までの整数値としている。この値が大きいほど、その場所にいるユーザが呼び出しにくいことを表す。
【0040】
図8の式により呼び出し判定数が計算されると、ステップS22において、図4で指定したユーザの呼び出しが可能かどうかを検査する。この判定に用いるルールを図9に示す。判定数が0よりも大きかったら呼び出し可能であると判定する。また、0であったら、どちらともいえないと判定し、0よりも小さかったら、呼び出し不可であると判定する。
【0041】
ステップS22で、判定数が0よりも大きい場合には、ステップS23において、呼び出しを実行する。本実施例では、センサシステム102に対して、タグ(バッジ)のスピーカから音を出すためのコマンドを生成し、そのコマンドをセンサシステム102に送信する。なお、この呼び出し処理は、PBXを用いて電話のダイヤルをしてもよいし、ポケットページャを鳴らしてもよい。
【0042】
ステップS22で、判定数が0であった場合には、表示部4が図10に示す確認ダイアログ20をディスプレイに出力する。すなわち、判定ではどちらともいえないので、判断をユーザに任せることになる。ユーザが“はい”のボタン21もしくは“いいえ”のボタン22を押すことによって呼び出すかどうかを決定する。なお、いずれかのボタンが押されると、確認ダイアログ20を消去する。
【0043】
ステップS25において、呼び出し判定部5は、どちらのボタンが押されたかを検査し、“はい”のボタン21が押された場合にはステップS23で呼び出しが実行される。また、“いいえ”のボタン22が押された場合にはステップS1に戻る。
【0044】
ステップS22で、判定数が0より小さい場合には、ステップS26において、呼び出し不可と判定し、図11に示す警告ダイアログ30を表示部4がディスプレイに出力する。ユーザが“了解”ボタン31を押すことによって、警告ダイアログ30は消去され処理が終了する。
【0045】
ステップS23、ステップS25、ステップS26の各処理が終了すると、本実施例のシステムの動作は1サイクルし、図4のステップS1に戻る。
【0046】
ここで、ステップS21、およびステップS22における呼び出し判定処理の内容を、図6、図7に示す具体的な数値を用いて説明する。
【0047】
ここでは、まず、ユーザが会議室1にいるユーザBを呼び出す場合について計算する。緊急度は1とする。ユーザAのレベルは10、ユーザBのレベルは0、会議室1のレベルは7であるので、判定数は10−0+1−7=4となり、0より大きい。したがって、この場合は呼び出しが実行される。
【0048】
また、ユーザCが役員室1にいるユーザAを呼び出す場合について計算する。緊急度は5とする。ユーザCのレベルは5、ユーザAのレベルは10、役員室1のレベルは10であるので、判定数は、5−10+5−10=−10となり、0より小さい。したがって、この場合は呼び出し不可である。
【0049】
次に、本実施例のシステムで利用する位置情報データべース101とセンサシステム102について、その構成と動作を図を用いて詳しく説明する。
【0050】
図12は、センサシステム102の構成を示すブロック図である。同図において、コンピュータ端末600は位置情報を収集し、それをネットワークに流すものである。センサ700は、RSシリアルなどのケーブルによって、コンピュータ端末600と接続している。また、センサ700は、本システムを動作させる前に、検出したい場所に複数配置し、それらは全てコンピュータ端末600と接続する。バッジ800は、各ユーザが胸などに装着するものである。なお、本実施の形態においては、バッジ800とセンサ700の通信に赤外線を用いたシステムを説明する。
【0051】
センサ700において、通信部702は、コンピュータ端末600と通信を行うものである。コマンド処理部704は、コンピュータ端末600から送信されたコマンドを受信し、解析するものである。送信部706は、コマンド処理部704が受信したコマンドを、バッジ800に向けて送信するものである。赤外線発光部708は、電気信号を赤外線光に変換してバッジ800に向けて発光する。位置情報管理部710は、バッジ800から受信したバッジIDとセンサIDを組み合わせた位置情報を作成したり、その位置情報を通信部702から送信したりする。
【0052】
また、受信部712は、バッジ800からのバッジIDを受信するものである。赤外線受光部714は、バッジ800から送信される赤外線光を受光し、その内容を電気的な信号に変化し、受信部712に送る。ROM716は、センサ700の動作を処理するプログラムや各センサ固有のセンサIDなどが書き込まれている。RAM718は、センサ700の動作処理におけるデータの一時退避領域として使用される。
【0053】
また、バッジ800において、赤外線受光部802は、センサ700から発光された赤外線を受光し、その内容を電気的な信号に変換して、受信部804に送る。受信部804は、センサ700から送信されたコマンドを受信するものである。コマンド処理部806は、受信部804が受信したコマンドを解析し実行するものである。音出力部808は、コマンド処理部806の命令にしたがって音を発する。
【0054】
また、赤外線発光部810は、電気信号を赤外線に変化してセンサ700に向けて発光する。発信部812は、バッジIDを赤外線発光部に渡して、センサ700に向けて送信するものである。ID管理部814は、バッジIDをタイマ816の動作にしたがって定期的に送信命令を出すものである。ROM818は、、バッジ800の動作を処理するプログラムや各バッジ固有のバッジIDなどが書き込まれている。RAM820は、バッジ800の動作処理におけるデータの一時待避領域として使用される。タイマ816は、バッジIDを送信する時間間隔を得るために使用する。
【0055】
また、コンピュータ端末600は、図13に示すような構成をしている。同図において、CPU602は、ROM606に記憶されているプログラムにしたがって、RAM608、通信I/F(インターフェース)604、外部I/F(インターフェース)610の各種制御を行う。ROM606には、外部I/F610から受信する位置情報の処理や、CPU602の処理を実行するための各種プログラムを格納している。また、CPU602の制御で実行されるセンサシステム102を実行するプログラムがROM606に格納されている。通信I/F604は、ネットワークと接続し、システムが取得した位置情報を要求に応じてネットワークに送出する。外部I/F610は、複数のセンサ700と接続し、センサ700からの位置情報を受信する。
【0056】
次に、センサシステム102の各部における動作をフローチャートを用いて説明する。
【0057】
図14は、バッジ800のバッジIDを定期的に送信する動作処理を示すフローチャートである。
【0058】
同図において、まず、ステップS1401において、ID管理部814がタイマ816を初期化する。タイマ816の初期化とは、時刻変数tを0にすることである。その後、タイマ816は、tを定期的にインクリメント(例えば、1秒毎に1加算する)する。
【0059】
そして、ステップS1402において、タイマ816は、tをインクリメントする度に、tが設定されたTに達したかどうかを検査する。設定されたTは、ROM818に記憶されており、その値をRAM820に読み出して、tと比較する。
【0060】
ここで、tがTに達していない場合は、ステップS1402を繰り返して検査を行う。また、tがTに達した場合は、ステップS1403において、ID管理部814がバッジIDの送信命令を送信部812に発行し、その命令を受けた送信部812は、赤外線発光部810を介してバッジIDを赤外線光にして発光する。バッジIDは、ROM818に記憶されており、その値をRAM820に読み出すことによって参照される。
【0061】
図15は、バッジ800のセンサ700からのコマンドを受信したときの動作処理を示すフローチャートである。
【0062】
同図において、まず、ステップS1501において、赤外線受光部802が赤外線光を受光すると、受信部804がコマンドを受信する。次にS1502において、コマンド処理部806は、受信したコマンドがアラーム要求かどうかを検査する。
【0063】
この検査の結果、アラーム要求であった場合には、ステップS1503において、コマンド処理部806が音出力命令を音出力部808に発光し、音出力部808が音を出力する。
【0064】
この処理が終了すると、次のコマンドを待つためにステップS1501に戻る。また、ステップS1501に戻る。また、ステップS1502で、コマンドがアラーム要求でなかった場合は、そのコマンドは無効であるのでステップS1501に戻る。
【0065】
図16は、センサ700の動作処理を示すフローチャートである。
【0066】
同図において、まず、ステップS1601において、センサ700の初期化を行う。RAM718のクリアなどである。次に、ステップS1602において、バッジ800からのバッジIDを受信したかどうかの検査を行う。
【0067】
バッジIDの受信は、次のようにして行われる。バッジ800が発光した赤外線光を赤外線受光部714が受光し、その内容を電気信号に変換して、受信部712に伝えられる。バッジIDを受信した受信部712はRAM718にバッジIDを格納することによって、受信が完了する。
【0068】
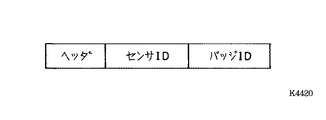
そして、ステップS1603において、位置情報管理部710が位置情報を作成する。ここでは、ROM716に記憶されているセンサIDと、受信したバッジIDの組になったデータを、センサ700における位置情報という。その形式を図17に示す。
【0069】
図17におけるヘッダは、コンピュータ端末600と通信するための情報であり、データの長さやデータのID番号などが書き込まれる。作成された位置情報は、ステップS1604において、位置情報管理部710が通信部702にデータ送信命令を発行し、コンピュータ端末600に対して位置情報が送信される。送信が終了すると、ステップS1601からの処理を繰り返す。
【0070】
また、ステップS1602で、バッジIDの受信でなかった場合は、コンピュータ端末600からのコマンドであるので、ステップS1605において、コマンド処理部704がコマンドを受信し解析する。そして、ステップS1606において、受信したコマンドをバッジ800に送信する。具体的には、コマンド処理部704がコマンド送信命令を送信部706に発行し、送信部706は、赤外線発光部708でコマンドを赤外線光に変換して発光する。
【0071】
図18は、コンピュータ端末600の動作処理を示すフローチャートである。同図において、まず、ステップS1801において、各種初期化を行う。ROM606から動作処理のためのプログラムをRAM608に読み込んだり、RAM608の変数領域を初期値に設定するなどである。
【0072】
次に、ステップS1802において、センサ700からの位置情報を外部I/F610において受信したかどうかを検査する。ここで、位置情報を受信していた場合は、ステップS1803において、位置情報データベース101に送信するための位置情報を作成する。そして、ステップS1804において、通信I/F604を介してネットワークへ位置情報を送信する。位置情報送信が終了すると、ステップS1801からの処理を操り返す。
【0073】
また、ステップS1802で位置情報の受信がでなかった場合は、ステップS1805において、本発明によるシステム100からのコマンドを受信したかどうかを検査する。具体的には、通信I/F604がネットワークからコマンドデータを受信したかどうかを検査する。ここで、コマンド受信でなかった場合は、ステップS1802からの処理を繰り返す。コマンド受信を検出した場合には、ステップS1806において、センサ700に送信するためのコマンドを作成し、ステップS1807において、コマンドを外部I/F610から送信する。コマンド送信が終了すると、ステップS1802からの処理を繰り返す。
【0074】
次に、位置情報データベース101の動作について説明する。
【0075】
図19は、位置情報データベース101の動作処理を示すフローチャートである。同図において、まず、ステップS1901において、各種初期化を行う。ROM906から動作処理のためのプログラムをRAM908に読み込んだり、RAM908の変数領域を初期値に設定するなどである。
【0076】
次に、ステップS1902において、本実施例によるシステム100から位置情報要求コマンドを受信したかどうかを検査する。コマンドが位置情報要求コマンドであった場合には、ステップS1903において、コマンドにて指定されたユーザの位置情報を作成して、ステップS1904において、位置情報を送信する。位置情報の送信が終了すると、ステップS1902へ戻る。
【0077】
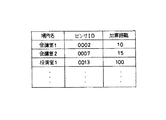
ステップS1902で、位置情報要求コマンドでなかった場合は、ステップS1905において、位置センサシステム102からの位置情報を受信したかどうかを検査する。位置情報を受信した場合は、ステップS1906において、位置情報の更新を行う。
【0078】
本実施例においては、位置情報を図20に示すような表で管理する。受信した位置情報におけるバッジIDに対して、現在どこにいるかを示すセンサIDと位置情報を受信した時刻を更新する。時刻はシステム内蔵のクロックより取得する。また、この表は、外部記憶装置(例えばハードディスクドライブ)上に格納されており、位置情報の変更に際しては、外部I/F910を介してデータの書き込みが行われる。
【0079】
なお、受信した位置情報におけるバッジIDが、初めて現れた時には表に追加される。
【0080】
次に本発明の第2実施例について説明する。
【0081】
図21は、本発明の第2実施例によるコンタクト支援システムの構成を示すブロック図である。これは、図1に示した構成のうち、データベースアクセス部6にタイマ9を接続した構成になっている。
【0082】
図22、図23は、第2の実施例のコンタクト支援システムの動作を示すフローチャートである。
【0083】
本実施例では、呼び出し判定を行った結果、呼び出し不可と判定した場合に、自動的に相手の所在の変化を待って、呼び出し処理を繰り返すリトライ機能を設けたものである。タイマ9は、システム起動時に設定された時間ごとにデータベースアクセス部6を実行させ、図4のステップS8からステップS10で説明した通りの処理を繰り返し実行させる。このため、図22では、繰り返し実行のための合流端子Cが追加されている。
【0084】
図23は、呼び出し判定の処理を示している。ここで、上述した図5の処理では、データ解析(ステップS20)の後、呼び出し可能度の計算(ステップS21)の前に、前回のユーザのいた場所との違いを検査するステップS30が、図5の処理に加わっている。
【0085】
また、呼び出し判定で呼び出し不可と判断した場合には、警告ダイアログを出力する代わりに、ステップS31でタイマ9を起動し、ステップS32で所定時間の計算が行われると、分岐端子Cより、図22のステップS8に進む。これにより、呼び出しが失敗した場合には、呼び出し判定処理が繰り返されることになる。そして、この繰り返しのタイミングは、タイマ9に設定された時間ごとに行う。これで、呼び出しが成功するまで、呼び出し判定が繰り返されることになる。
【0086】
次に本発明の第3実施例について説明する。
【0087】
図24は、本発明の第3実施例に係るコンタクト支援システムの構成を示すブロック図である。
【0088】
図示のように、本実施例のシステム2400はコマンド解析部2401、コマンド作成部2402と、通信部2403と、表示部2402と、距離判定部2405と、データベースアクセス部2406と、メモリ2407と、外部記憶装置(判定のための情報)2408と、タイマ2409とから構成されている。
【0089】
ここで、第1実施例のときと同様に、コンタクト支援システム2400は、図2に示すように、センサシステム102、および、位置情報データベース101とネットワークを介して接続されているものとする。
【0090】
センサシステム102は、あちこちに配置されたセンサと、人が付けるタグ(バッジ)によって、タグとセンサの位置関係を位置情報データベース101のデータを更新することによって管理する。また、センシングの方法としては、赤外線、電波、超音波、磁気を用いたもの、または、それらを組み合わせたもののいずれであってもよい。
【0091】
コンタクト支援システム2400は、位置情報データベース101のデータを参照して、人の所在情報を得て、それを呼び出し可否の判定に利用する。また、センサシステム102におけるタグ(バッジ)にはスピーカが内蔵されており、コマンドによって所望のタグのスピーカから音を出すことができるものとする。そして、この音によって相手が近づいたことを知らせるものとする。なお、この音によるアラーム部分は、PBXを利用した電話やポケットページャを使用しても実現できる。
【0092】
図24において、コマンド解析部2401は、キーボードやマウス等の入力デバイスと接続されており、入力されたコマンドを解析する。コマンド作成部2402は、センサシステム102に対して、スピーカから音を出すように指示するコマンドを作成する。通信部2403はネットワークと接続しており、位置情報データベース101やセンサシステム102と通信を行う。
【0093】
表示部2404は、ディスプレイと接続しており、出力内容を表示する。距離判定部2405は、自分と相手の位置情報データをもとにしてお互いの距離を計算し、その距離が指定範囲内かどうかの判定を行う。データベースアクセス部2406は、位置情報データベース101から位置情報データを参照する。
【0094】
外部記憶装置(判定のための情報)2408は、本実施例のシステムを利用するユーザや場所に関する情報を格納するためのものである。メモリ2407は、システムが一時的にデータを待避するための領域として使用する。また、タイマ2409は、データベースアクセス部2406が定期的に位置情報を参照するように時間管理を行う。
【0095】
次に、本システムの動作をフローチャートを用いて説明する。
【0096】
図25は、本実施例のシステムの開始から終了までの動作において、入力デバイスからコマンド入力があった場合の各処理の流れを示すフローチャートである。
【0097】
システムを起動すると、まず、ステップS2501において、システム内部で使用する変数の初期化を行う。そして、ステップS2502において、入力デバイスからのコマンド入力があると、コマンド解析部2501は入力されたコマンドの解析を行う。次に、ステップS2503において、入力されたコマンドが自分の指定であるかどうかの検査を行う。
【0098】
本実施例のシステムは、誰もが使用できるシステムであり、自分の名前も指定することを想定している。ただし、システムを立ち上げたユーザのみが使用する場合には、環境変数等によりユーザ名を取得することもできる。
【0099】
そして、ステップS2503の結果が自分の指定であった場合には、ステップS2504において、ユーザIDの検索を行う。ユーザが自分を指定するのは、自分の名前によって指定するので、その名前からユーザIDを検索する。この検索に必要な情報は、外部記憶装置2408に格納されており、ユーザ名とユーザIDの組のリスト形式になっている。検索した結果、得られたユーザIDは、メモリ2407に格納される。
【0100】
ステップS2503で、自分の指定でなかった場合には、ステップS2505において、入力コマンドが相手を指定するものかどうかを検査する。この結果が相手の指定であった場合には、ステップS2506において、ステップS2504と同様にユーザIDを検索して、その結果をメモリ2407に格納する。
【0101】
以上のステップS2504またはステップS2506が終了するとステップS2502に戻る。
【0102】
また、ステップS2505で、相手の指定でなかった場合、ステップS2507において、入力コマンドが自分と相手の距離を検索する要求であるかどうかを検査する。この結果が検索開始の要求であった場合には、ステップS2508において、タイマ2409は初期化処理を行う。タイマ2409の初期化とは、時刻変数tを0にすることである。
【0103】
タイマ2409は、tを定期的にインクリメントする。そして、タイマ2409は、tをインクリメントする度に、tが設定されたTに達したかどうかをステップS2509にて検査する。そして時間がTに達していた場合には、距離判定のために、分岐端子Aを介して図26のステップS2601へ進む。また、時間がTに達していない場合はステップS2509を繰り返す。
【0104】
ステップS2507で、検索開始の要求でなかった場合には、システム終了を要求するコマンドであるので、システムが終了する。
【0105】
次に、時間Tが経過する度に行う距離判定の処理を図26を用いて説明する。
【0106】
まず、ステップS2601で、コマンド作成部2402が自分および相手の位置情報を位置情報データベース101から参照するためのコマンドを作成する。そして、ステップS2602において、作成した位置情報を参照するためのコマンドを通信部2403が位置情報データベース101に対して送信する。
【0107】
次に、ステップS2603において、通信部2403が位置情報データベース101からの位置情報を受信したかどうかの検査を行う。データを受信しない間は、ステップS2603を繰り返す。そして、ステップS2603で、位置情報データを受信した場合は、ステップS2604において、データベースアクセス部2406が自分および相手の位置情報を取得する。このとき図25のステップS2504およびステップS2506で取得したユーザIDをメモリ2407から参照し、各々の位置情報を取得する。取得した位置情報はメモリ2407に格納する。
【0108】
そして、ステップS2605において、メモリ2407に格納された前回の位置情報と比較して、自分もしくは相手が移動したかどうかを検査する。この結果、自分も相手も移動していない場合は、お互いの距離に変化がないので、距離判定の処理を繰り返すために、分岐端子Bより図25のステップS2508に戻る。ここで、前回の位置情報において、初回に関しては、初期値と比較する。初期値は図24のステップS2501において、メモリ2407に格納されているものとする。
【0109】
また、ステップS2605において、自分もしくは相手が移動した場合には、S2606において自分と相手との距離を計算する。
【0110】
次に、得られた自分および相手の位置情報から2人の距離を計算する処理について説明する。この方法については、様々考えられるが、本実施例では4つの方法について説明する。
【0111】
まず、第1の方法を図27を用いて説明する。図27は、タグ(バッジ)を付けた人が存在する場所をブロックに分けている様子を示している。
【0112】
図27において、2700は分けられたブロックの1つであるB1を示す。同様にB2、B3…となる。また、2701から2703は、タグ(バッジ)の存在位置を示している。すなわち、図27の例では、ある検査した時間において、タグT1がブロックB3に、タグT2がブロックB8に、タグT3がブロックB16に、それぞれ存在していることを示している。
【0113】
このとき、自分のいるブロックの8近傍のブロックに相手がいる場合に、指定範囲内に相手がいるものとすることができる。ここで、タグT2が自分で、タグT1が相手の場合、自分のいるブロックB8から見て、相手のいるブロックは8近傍にあるので、指定範囲内にいると判断できるのである。
【0114】
この処理を図26で説明すると、ステップS2606で、自分および相手のいるブロックをステップS2604で得られた位置情報をもとに取得し、ステップS2607において、相手のブロックが自分のブロックの8近傍であるかどうかの検査を行う。この結果、8近傍でなかった場合は、検査を繰り返すために分岐端子Bより図25のステップS2508に戻る。
【0115】
ステップS2607で、相手が8近傍のブロックにいた場合は、ステップS2608において、コマンド作成部2402が相手が近づいたことを知らせるためのコマンドを作成し、ステップS2609において、通信部2403がコマンドをセンサシステム102に送信する。本実施例では、タグ(バッジ)にスピーカが内蔵されており、センサシステム102にコマンドを送ることによって音を鳴らすこととしている。
【0116】
次に、ステップS2609が終了すると、システム全体を繰り返し実行するために、分岐端子Cより図25のステップS2501へ戻る。
【0117】
次に、第2の距離判定方法について、図28を用いて説明する。図28において、2800は、センサシステム102のセンサの有効範囲を示している。この範囲の中心距離をL1からL6で示している。2801、2802はタグの存在する位置である。自分をタグT1、相手をタグT2とすると、タグT1が存在するセンサの有効範囲とタグT2が存在するセンサの有効範囲の距離はL2である。このL2が指定された距離より長いか短いかによって指定範囲内に相手がいるかどうかの判定を行うことができる。
【0118】
次に、第3の距離判定方法について、図29を用いて説明する。図29において、2900、2901はタグ(バッジ)を示す。2902は、各タグがセンサによって検知される強度を示す。この円が大きいほど、センサに反応する強度が強いことを表している。言い換えると、この円は、タグが存在する可能性のある範囲を示していることになる。したがって、タグT1およびタグT2が移動して、ちょうど図29のように円が接する位置に来たときに、指定範囲内に近づいたと判定することができる。
【0119】
次に、第4の距離判定方法について、図30を用いて説明する。図30において、3000、3001はタグ(バッジ)を示す。位置センサシステムにより、それぞれのタグの位置が、タグT1が(x1、y1)、タグT2が(x2、y2)で与えられたとすると、2点間の距離の公式により、タグ間の距離が求まる。この距離が指定された距離よりも短い場合に、指定範囲内に近づいたと判定することができる。
【0120】
以上説明した各種距離判定方法において、センサの設置位置は、図31に示すような表で管理されている。この表の内容は、外部記憶装置2408に予め記憶してあり、必要に応じて参照することができる。例えば、第2の距離判定方法では、センサ間の距離を、図31の表の座標データを参照して、2点間の距離の公式を用いて計算することができる。
【0121】
また、距離判定において、相手がいる場所に応じて重みを付けることができる。これは、相手が重要な会議に参加している場合に、無条件に(距離判定だけで)アラームすることを避けるためである。図32に示すような表を参照し、求められた相手との距離に、相手のいる場所に応じた仮想的な距離を加算することによって実現できる。
【0122】
例えば、相手との距離が30で、指定範囲内距離が50であった場合には、もし、相手が会議室1にいる場合は、加算距離が10なので、30+10=40が相手との距離となり、指定範囲内であると判定できる。もし、相手が役員室1にいる場合は、加算距離が100なので、30+100=130が相手との距離となり指定範囲内でないと判定する。
【0123】
また、距離の計算において、その直線距離ではなく、オフィスのように直線で移動できない場合を考慮することも可能である。例えば、オフィスのレイアウトをデータとして入力しておき、自分から相手への移動の最短経路を求める。この最短経路にそって、図33に示すような移動負荷表を用いて、移動にかかるコストを計算する。このコストを相手との距離とすれば実現できる。
【0124】
次に、本発明の第4実施例について説明する。
【0125】
本実施例は、上述の第1実施例と第3実施例を組み合わせた実施例であり、呼び出し判定において、ユーザ間の呼び出し関係と距離の両方を判定に用いるシステムを実現している。
【0126】
図34は、本実施例のシステムの構成を示すブロック図であり、コマンド解析部3401と、コマンド作成部3402と、通信部3403と、表示部3404と、呼び出し判定部3405と、呼び出し強度計算部3406と、距離計算部3407と、データベースアクセス部3408と、メモリ3409と、外部記憶装置(判定のための情報)3410と、タイマ3411とから構成されている。
【0127】
また、本実施例のコンタクト支援システムは、第1実施例、第3実施例の場合と同様に、図2に示すような、センサシステム102および、位置情報データベース101にネットワークを介して接続されているものとする。
【0128】
図34において、コマンド解析部3401は、キーボードやマウス等の入力デバイスと接続されており、入力されたコマンドを解析する。コマンド作成部3402は、センサシステム102に対して、スピーカから音を出すように指示するコマンドを作成する。
【0129】
通信部3403は、ネットワークと接続しており、位置情報データベース101やセンサシステム102と通信を行う。表示部3404は、ディスプレイと接続しており、出力内容を表示する。呼び出し判定部3405は、呼び出し強度計算部3406と距離計算部3407の計算結果に基づいて、相手が呼び出し可能かどうかの判定を行う。
【0130】
データベースアクセス部3408は、位置情報データベース101からデータを参照する。外部記憶装置(判定のための情報)3410は、本システムを利用するユーザや場所に関する情報を格納するためのものである。メモリ3409は、本システムが一時的にデータを待避するために使用する。また、タイマ3411は、データベースアクセス部3408が定期的に位置情報を参照するように時間管理を行う。
【0131】
なお、以上のコマンド解析部3401、コマンド解析部3402、および呼び出し判定部3405等は、本実施例のシステムに設けられるマイクロコンピュータ(図示せず)の機能の一部として設けられている。また、以下に示す各フローチャートの動作は、このマイクロコンピュータ内のメモリに格納された制御プログラムによって実行されるものである。そして、このようなマイクロコンピュータの制御プログラムは、たとえばハードディスク、フロッピーディスク、CD−ROM等の各種記憶媒体に予め格納されたものを、本実施例のシステムのリーダ(図示せず)にセットし、マイクロコンピュータに読み取らせるようにすることも可能である。
【0132】
次に、本実施例のシステムの動作をフローチャートを用いて説明する。
【0133】
システム全体の大まかな処理の流れは、基本的に第1実施例、第3実施例のときと同じである。ただし、呼び出し判定を行う処理(第1実施例では図5、第3実施例では図23にて説明した部分)が異なるので、この部分を図35を用いて詳しく説明する。また、他の部分の処理は第1実施例および第3実施例で説明したことに同じなので省略する。
【0134】
図35は、位置情報データベース101から位置情報データを受信して、呼び出しの判定を行う処理を示すフローチャートである。
【0135】
通信部3403が位置情報データを受信すると、ステップS3500において、データベースアクセス部3408が受信したデータの解析を行う。この解析の結果得られた位置情報データは、メモリ3409に格納される。位置情報データベースから得られる位置情報はセンサIDである。そして、ステップS3501において、前回の位置情報受信処理においてメモリ3409に格納した位置情報データと今回受信した位置情報データを比較して、自分もしくは相手の居場所に変化があったかどうかを検査する。変化していない場合は、ステップS3506に進む。
【0136】
ステップS3501で、自分もしくは相手が移動したという結果を得た場合は、ステップS3502において、自分と相手の距離を計算する。計算方法は上述の第3実施例にて説明した方法を用いる。計算した結果は、メモリ3409に格納される。
【0137】
次に、ステップS3503において、呼び出し強度計算部3406が呼び出し可能性の度合いを示す呼び出し強度を計算する。計算方法は上述の第1実施例にて説明した方法を用いる。計算した結果は、メモリ3409に格納される。
【0138】
次に、ステップS3504において、呼び出し判定部3405が呼び出し可能かどうかを判定する。本実施例では、この判定を、ステップS3502で記憶した距離値と、ステップS3503で記憶した呼び出し強度値の和が指定された値と比較して、大きいか小さいかによって行う。
【0139】
ステップS3504の結果、呼び出し可能と判定した場合には、ステップS3505において、呼び出しを実行する。本実施例では、センサシステム102に対して、タグ(バッジ)のスピーカから音を出すためのコマンドを生成し、そのコマンドをセンサシステム102に送信する。呼び出し実行が終了すると、分岐Bにて、本実施例のシステムのメインループの先頭に戻る。
【0140】
また、ステップS3504の結果、呼び出し不可と判定した場合には、ステップS3506において、タイマ3491を起動し、ステップS3507において、所定時間が経過したかを検査する。所定の時間が経過すると、分岐Cにて、自分および相手の位置情報要求コマンドの送信から処理をやり直す。こうすることによって、相手が呼び出し可能になるまで判定を繰り返す。
【0141】
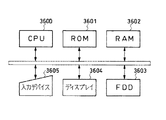
なお、上述した各実施例のシステムは、ネットワークに接続したコンピュータ端末にプログラムを投入することによっても実現できる。図36は、コンピュータ端末の構成を示している。
【0142】
同図において、CPU3600は、ROM3601に記憶されているプログラムに従って、RAM3602、入力デバイス3605、ディスプレイ3604、FDD3603の各種制御を行う。ROM3601には、入力デバイス3605から入力されるデータの処理やCPU3600の処理を実行するための各種プログラムを格納している。また、CPU3600の制御で実行されるシステムを実行するプログラムがROM3601に格納されている。
【0143】
RAM3602は、各種プログラムや入力デバイス3605から入力されるデータの作業領域および一時待避領域である。FDD(フロッピディスクドライブ)3603は、FD(フロッピディスク)(図示せず)を装着し、データの読み書きが可能である。また、装置されたFDにプログラムを書き込み、そのプログラムをRAM3602に読み込むことで処理を実行させることもできる。なお、本実施例では、プログラムをROM3601に記憶して、CPU3600の制御により、ROM3601からRAM3602に読み込んだ後、前述した処理フローチャートを実行する。
【0144】
なお、FDD3603の代わりにCD−ROMドライブやHDD(ハードディスクドライブ)を備え、それぞれのドライブに装着あるいは内蔵されるCD−ROMやHDに上述のプログラムを記憶して、記憶したプログラムを読み出すことで処理を実行することも可能である。
【0145】
また、本発明の目的は、前述した実施の形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(またはCPUやMPU)が記憶媒体に格納されたプログラムを読み出して実行することによっても達成される。
【0146】
この場合、記憶媒体から読み出されたプログラムコード自体が前述した実施の形態を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を実現することになる。プログラムコードを供給するための記憶媒体としては、例えば、フロッピーディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。
【0147】
また、コンピュータが読み出したプログラムコードを実行することにより、前述した実施の形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理によって前述した実施の形態の機能が実現される場合も含まれる。
【0148】
さらに、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPU等が実際の処理の一部または全部を行い、その処理によって前述した実施の形態の機能が実現される場合も含まれる。
【0149】
また、本発明を上記記憶媒体に適用する場合、その記憶媒体には、先に説明した処理フローチャートに対応するプログラムコードを格納することになる。簡単に説明すると、例えば第3実施例では図37のメモリマップ例に示す各モジュールを記憶媒体に格納することになる。
【0150】
すなわち、本実施例では、コマンドおよびユーザ名の入力を受信して解釈する入力工程のコードと、前記入力工程により受信した内容を表示する表示工程のコードと、位置センサシステムと通信を行う通信工程のコードと、位置センサシステムから指定したユーザの位置情報を取得する位置取得工程のコードと、ユーザおよび場所に関する情報メモリに格納する第1の記憶工程のコードと、前記入力工程により受信した情報をメモリに格納する第2の記憶工程のコードと、前記第1の記憶工程により記憶した情報と、前記第2の記憶工程により記憶した情報と、前記位置取得工程で得られた情報とに基づいて、ユーザ間の距離を計算する距離取得工程のコードと、前記距離取得工程により取得した距離情報をもとに、相手が近づいたことを検出する距離判定工程のコードと、相手が近づくまで前記位置取得工程および前記距離判定工程を繰り返すためのリトライ工程のコードと、前記距離判定工程で相手が近いと判定した場合に、それを知らせる通知工程のコード等の各モジュールのプログラムコードを記憶媒体に記憶すればよい。
【0151】
【発明の効果】
以上説明したように、本発明によれば、通信装置の所有者が位置する場所や、通信装置の所有者を呼び出す際の緊急度等を考慮した呼び出しを行うことができる。
【0152】
また、呼び出す相手の情報と、指定された緊急度の情報と、呼び出す相手の位置情報に基づいて、呼び出しが可能かどうかを判定することができる。また、呼び出しが可能である場合には呼び出しを実行し、呼び出しが不可である場合には、その内容を表示するようにしたので、相手の所在情報を反映した呼び出しを行うことができる。また、呼び出し不可の場合にいる相手に対して無理やり呼び出しをすることを防ぐことができ、呼び出しの割り込みによる作業の効率低下を防ぐことができる。
【0153】
また、呼び出し可能性がいずれとも言えないと判定した場合に、ユーザに確認を促すダイアログを出力することにより、より正確な判断のもとに呼び出しを行うことができ、呼び出しの確実さが増し、作業の効率を向上させることができる。
【0154】
さらに、呼び出しが不可である場合に、タイマが設定されて時間毎に呼び出し判定処理を繰り返すので、ユーザは毎回呼び出しのための指定を行う必要がなくなり、また、呼び出しが確実に行われるようになるので、作業効率を向上させることができる。
【0155】
また、連絡したい相手との距離を考慮した呼び出しを行うことができる。また、連絡したい相手が近くにいることを通知することもできる。また、連絡したい相手との距離情報をもとに相手が近いと判定した場合に、それをユーザに通知するようにしたので、各ユーザ同士で互いの所在を得ることができ、また、互いの距離を知ることができるで相手に会いやすい状態にある機械を適切に得ることができるため、相手に会うという作業の効率を向上させることができる。
【0156】
また、呼び出す相手の情報と、指定された緊急度の情報と、呼び出す相手の位置情報に基づいて、呼び出しが可能であるかどうかを判定し、自分と相手の位置情報に基づいて、ユーザ間の距離を計算し、相手と距離が近く、かつ、呼び出し可能であると判定した場合に、呼び出しを実行するようにしたので、確実に近くにいる相手を正確な判断のもとに呼び出すことができ、よりスムーズな呼び出しが可能であるので、作業効率を向上させることができる。
【図面の簡単な説明】
【図1】本発明の第1実施例におけるシステムの構成を示すブロック図である。
【図2】本発明の実施例におけるシステムと、位置情報データベースと、センサシステムとの関係を示したブロック図である。
【図3】本発明の実施例におけるセンサシステムの構成を示すブロック図である。
【図4】本発明の第1実施例におけるシステムの動作を示すフローチャートである。
【図5】本発明の第1実施例におけるシステムの動作を示すフローチャートである。
【図6】本発明の実施例におけるユーザに関する情報の格納形式を示した説明図である。
【図7】本発明の実施例における場所に関する情報の格納形式を示した説明図である。
【図8】本発明の実施例における呼び出し判定に用いる計算式を示す説明図である。
【図9】本発明の実施例における呼び出し判定に用いるルールを示す説明図である。
【図10】本発明の第1実施例における確認ダイアログの表示を示す説明図である。
【図11】本発明の第1実施例における警告ダイアログの表示を示す説明図である。
【図12】本発明の実施例における位置センサシステムの構成を示すブロック図である。
【図13】本発明の実施例における位置センサシステムの一部を実施するコンピュータ端末のハードウェアを示すブロック図である。
【図14】本発明の実施例における位置センサシステムのバッジの動作を示すフローチャートである。
【図15】本発明の実施例における位置センサシステムのバッジの動作を示すフローチャートである。
【図16】本発明の実施例における位置センサシステムのセンサの動作を示すフローチャートである。
【図17】本発明の実施例における位置センサシステムと位置情報データベースで交換する位置情報の形式を示す説明図である。
【図18】本発明の実施例における位置センサシステムのコンピュータ端末上で動作するプログラムの流れを示すフローチャートである。
【図19】本発明の実施例における位置情報データベースの動作を示すフローチャートである。
【図20】本発明の実施例における位置情報データベースで管理する位置情報テーブルを示す説明図である。
【図21】本発明の第2実施例におけるシステムの構成を示すブロック図である。
【図22】本発明の第2実施例におけるシステムの動作を示すフローチャートである。
【図23】本発明の第2実施例におけるシステムの動作を示すフローチャートである。
【図24】本発明の第3実施例におけるシステムの構成を示すブロック図である。
【図25】本発明の第3実施例におけるシステムの動作を示すフローチャートである。
【図26】本発明の第3実施例におけるシステムの動作を示すフローチャートである。
【図27】本発明の実施例における第1の距離測定方法を説明する説明図である。
【図28】本発明の実施例における第2の距離測定方法を説明する説明図である。
【図29】本発明の実施例における第3の距離測定方法を説明する説明図である。
【図30】本発明の実施例における第4の距離測定方法を説明する説明図である。
【図31】本発明の実施例におけるセンサ位置を管理するためのテーブルを示す説明図である。
【図32】本発明の実施例における場所毎に対応した加算距離を管理するためのテーブルを示す説明図である。
【図33】本発明の実施例における場所間の移動にかかるコスト計算に用いるテーブルを示す説明図である。
【図34】本発明の第4実施例におけるシステムの構成を示すブロック図である。
【図35】本発明の第4実施例におけるシステムの動作を示すフローチャートである。
【図36】本発明の実施例を実施するコンピュータ端末のハードウェア構成を示すブロック図である。
【図37】本発明の実施例を実施するための各モジュールを格納した記憶媒体のメモリマップ例を示す説明図である。
【符号の説明】
1、51、81…コマンド解析部、
2、52、82…コマンド作成部、
3、53、83…通信部、
4、54、84…表示部、
5、85…呼び出し判定部、
6、56、88…データベースアクセス部、
7、58、90…外部記憶装置(判定のための情報)、
8、57、89…メモリ、
9、59、91…タイマ、
100…コンタクト支援システム、
101…位置情報データベース、
102…位置センサシステム。
Claims (8)
- 移動通信装置の位置情報を検知する位置検知手段と;
上記移動通信装置が相手を呼び出す強さを示すレベルと、通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当手段と;
上記移動通信装置の相手を呼び出す強さを示すレベルを参照する参照手段と;
上記検知された位置情報と、上記参照された移動通信装置のレベルと上記通信装置のレベルとの差とに基づいて、上記移動通信装置と上記通信装置との通信を許可するかどうかを制御する制御手段と;
を有することを特徴とする通信システム。 - 請求項1において、
上記通信装置によって要求された通信が、特別な通信であることを示す緊急度を割り当てる緊急度割当手段を有し、
上記制御手段は、上記割り当てられた緊急度に応じて、制御することを特徴とする通信システム。 - 請求項1において、
他の通信装置によって要求された通信を許可するかどうかの指示を、上記移動通信装置から受ける受信手段を有し、
上記制御手段は、上記指示に応じて、制御することを特徴とする通信システム。 - 請求項1において、
上記位置検知手段によって検知された位置情報に基づいて、上記移動通信装置と上記通信装置との距離を計算する計算手段を有し、
上記制御手段は、上記計算結果に応じて、制御することを特徴とする通信システム。 - 請求項1において、
上記位置検知手段は、上記制御手段によって通信が許可されるまでの間、検知することを特徴とする通信システム。 - 移動通信装置と通信可能な通信制御装置であって、
上記移動通信装置が相手を呼び出す強さを示すレベルと、上記通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当手段と;
上記移動通信装置との通信要求を、通信装置から受信する受信手段と;
上記移動通信装置の位置を検知する位置検知装置から、上記移動通信装置の位置情報を取得する取得手段と;
上記移動通信装置の相手を呼び出す強さを示すレベルを記憶装置から参照する参照手段と;
上記取得された位置情報と、上記参照された移動通信装置のレベルと通信装置のレベルとの差とに基づいて、上記通信装置と上記移動通信装置との通信を許可するかどうかを制御する制御手段と;
を有することを特徴とする通信制御装置。 - 移動通信装置と通信可能な通信制御装置を制御するための制御方法であって、
上記移動通信装置が相手を呼び出す強さを示すレベルと、上記通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当ステップと;
上記移動通信装置との通信要求を、通信装置から受信するステップと;
上記移動通信装置の位置を検知する位置検知装置から、上記移動通信装置の位置情報を取得するステップと;
上記移動通信装置の相手を呼び出す強さを示すレベルを記憶装置から参照する参照ステップと;
上記取得された位置情報に応じて、上記通信装置と上記移動通信装置との通信を許可するかどうかを制御するステップと;
を有することを特徴とする制御方法。 - 移動通信装置と通信可能な通信制御装置を制御するための制御方法を、コンピュータに実行させるためのプログラムをコンピュータ読み出し可能に記憶した記憶媒体であって、
上記移動通信装置が相手を呼び出す強さを示すレベルと、上記通信装置が相手を呼び出す強さを示すレベルとを割り当てるレベル割当ステップと;
上記移動通信装置との通信要求を、通信装置から受信するステップと;
上記移動通信装置の位置を検知する位置検知装置から、上記移動通信装置の位置情報を取得するステップと;
上記取得された位置情報と、上記参照された移動通信装置のレベルと通信装置のレベルとの差とに基づいて、上記通信装置と上記移動通信装置との通信を許可するかどうかを制御するステップと;
をコンピュータに実行させるプログラムを記憶したコンピュータ読取可能な記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP14216198A JP3740281B2 (ja) | 1997-06-30 | 1998-05-08 | 通信システム、通信制御装置、その制御方法および記憶媒体 |
| US09/104,007 US6700966B2 (en) | 1997-06-30 | 1998-06-24 | System, apparatus and method for processing calls based on place detection of moving personnel or objects |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP9-189053 | 1997-06-30 | ||
| JP18905397 | 1997-06-30 | ||
| JP18905597 | 1997-06-30 | ||
| JP9-189055 | 1997-06-30 | ||
| JP14216198A JP3740281B2 (ja) | 1997-06-30 | 1998-05-08 | 通信システム、通信制御装置、その制御方法および記憶媒体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1175247A JPH1175247A (ja) | 1999-03-16 |
| JP3740281B2 true JP3740281B2 (ja) | 2006-02-01 |
Family
ID=27318395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP14216198A Expired - Fee Related JP3740281B2 (ja) | 1997-06-30 | 1998-05-08 | 通信システム、通信制御装置、その制御方法および記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6700966B2 (ja) |
| JP (1) | JP3740281B2 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030093405A1 (en) * | 2000-06-22 | 2003-05-15 | Yaron Mayer | System and method for searching, finding and contacting dates on the internet in instant messaging networks and/or in other methods that enable immediate finding and creating immediate contact |
| US8644475B1 (en) * | 2001-10-16 | 2014-02-04 | Rockstar Consortium Us Lp | Telephony usage derived presence information |
| GB0128595D0 (en) * | 2001-11-29 | 2002-01-23 | Mitel Knowledge Corp | Automatic location-aware feature selection |
| US7299286B2 (en) | 2001-12-27 | 2007-11-20 | Nortel Networks Limited | Personal user agent |
| US7227937B1 (en) | 2002-03-19 | 2007-06-05 | Nortel Networks Limited | Monitoring natural interaction for presence detection |
| US7035923B1 (en) | 2002-04-10 | 2006-04-25 | Nortel Networks Limited | Presence information specifying communication preferences |
| US7139797B1 (en) | 2002-04-10 | 2006-11-21 | Nortel Networks Limited | Presence information based on media activity |
| US7212837B1 (en) * | 2002-05-24 | 2007-05-01 | Airespace, Inc. | Method and system for hierarchical processing of protocol information in a wireless LAN |
| US8392609B2 (en) | 2002-09-17 | 2013-03-05 | Apple Inc. | Proximity detection for media proxies |
| US7555108B2 (en) | 2002-10-01 | 2009-06-30 | Nortel Networks Limited | Presence information for telephony users |
| US7257218B2 (en) * | 2002-12-30 | 2007-08-14 | Nortel Networks Limited | Presence enabled queue management |
| US7711810B2 (en) | 2003-01-03 | 2010-05-04 | Nortel Networks Limited | Distributed services based on presence technology |
| HK1059191A2 (en) * | 2003-02-26 | 2004-05-28 | Intexact Technologies Ltd | A telephony system and a method of operating same |
| US6987847B1 (en) * | 2003-04-15 | 2006-01-17 | America Online, Inc. | Communication device monitoring |
| US8161116B2 (en) * | 2003-05-23 | 2012-04-17 | Kirusa, Inc. | Method and system for communicating a data file over a network |
| JP4718767B2 (ja) * | 2003-06-24 | 2011-07-06 | Necインフロンティア株式会社 | コミュニケーション交換機 |
| US9118574B1 (en) | 2003-11-26 | 2015-08-25 | RPX Clearinghouse, LLC | Presence reporting using wireless messaging |
| US7394345B1 (en) * | 2003-12-08 | 2008-07-01 | At&T Corp. | Arrangement for indicating presence of individual |
| US8229454B1 (en) | 2004-03-22 | 2012-07-24 | Avaya Inc. | Personal location information management |
| US20050232404A1 (en) * | 2004-04-15 | 2005-10-20 | Sharp Laboratories Of America, Inc. | Method of determining a user presence state |
| US8358762B1 (en) | 2005-03-21 | 2013-01-22 | Aol Inc. | Conference calls and meetings via electronic messaging interface |
| US20070088839A1 (en) * | 2005-10-19 | 2007-04-19 | Nortel Networks Limited | Local time related presence automation and session control |
| US7646307B2 (en) * | 2005-12-09 | 2010-01-12 | Honeywell International Inc. | System and methods for visualizing the location and movement of people in facilities |
| US8355363B2 (en) * | 2006-01-20 | 2013-01-15 | Cisco Technology, Inc. | Intelligent association of nodes with PAN coordinator |
| ES2357925B1 (es) * | 2009-02-25 | 2012-03-12 | Telefónica, S.A. | Sistema y método de detección de presencia de usuario para el enrutamiento de llamadas en redes de telecomunicaciones. |
| US20190207946A1 (en) * | 2016-12-20 | 2019-07-04 | Google Inc. | Conditional provision of access by interactive assistant modules |
| US11436417B2 (en) | 2017-05-15 | 2022-09-06 | Google Llc | Providing access to user-controlled resources by automated assistants |
| US10127227B1 (en) | 2017-05-15 | 2018-11-13 | Google Llc | Providing access to user-controlled resources by automated assistants |
| EP3682345B1 (en) | 2018-08-07 | 2021-11-24 | Google LLC | Assembling and evaluating automated assistant responses for privacy concerns |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5099346A (en) * | 1988-01-27 | 1992-03-24 | Spectrix Corporation | Infrared communications network |
| US5455851A (en) * | 1993-07-02 | 1995-10-03 | Executone Information Systems, Inc. | System for identifying object locations |
| US5594786A (en) * | 1990-07-27 | 1997-01-14 | Executone Information Systems, Inc. | Patient care and communication system |
| US5197092A (en) * | 1990-10-31 | 1993-03-23 | Mccaw Cellular Communications, Inc. | Location registration system for a personal communicator such as a cellular telephone |
| JPH05130227A (ja) * | 1991-11-07 | 1993-05-25 | Fujitsu Ltd | 無線カードによる移動先自動管理装置 |
| WO1997018540A1 (en) * | 1995-11-13 | 1997-05-22 | Motorola Inc. | Method and apparatus for summoning police or security personnel for assistance in an emergency situation |
| DE19548190A1 (de) * | 1995-12-22 | 1997-06-26 | Sel Alcatel Ag | Verfahren zum Entscheiden über die Annahme oder Nichtannahme eines Anrufs, sowie Schaltungseinheit, Fernmeldeendgerät, tragbare Geräteeinheit und Netzkomponente für ein Fernmeldenetz |
| JP2919354B2 (ja) * | 1996-05-28 | 1999-07-12 | 静岡日本電気株式会社 | 個別選択呼出受信機 |
| US5742233A (en) * | 1997-01-21 | 1998-04-21 | Hoffman Resources, Llc | Personal security and tracking system |
-
1998
- 1998-05-08 JP JP14216198A patent/JP3740281B2/ja not_active Expired - Fee Related
- 1998-06-24 US US09/104,007 patent/US6700966B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US6700966B2 (en) | 2004-03-02 |
| US20020048356A1 (en) | 2002-04-25 |
| JPH1175247A (ja) | 1999-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3740281B2 (ja) | 通信システム、通信制御装置、その制御方法および記憶媒体 | |
| US20220108259A1 (en) | Business metric identification from structured communication | |
| US20030008659A1 (en) | Locating items | |
| US20070262863A1 (en) | Sensor network system and sensor network position specifying method | |
| CN105761425B (zh) | 求救方法、系统及装置 | |
| US6738628B1 (en) | Electronic physical asset tracking | |
| EP2827168A1 (en) | Object acquiring system and acquiring method thereof | |
| US7433648B2 (en) | System and a node used in the system for wireless communication and sensory monitoring | |
| JP3710416B2 (ja) | 位置検出システム | |
| JP4792394B2 (ja) | 無線タグの位置を確認するためのネットワーク | |
| CN101197878A (zh) | 用于通信转发的方法和系统 | |
| US10354295B2 (en) | Reception system and reception method | |
| KR20110007458A (ko) | Rfid를 이용한 미아 방지 시스템 및 방법 | |
| CN113490145B (zh) | 一种基于uwb的自组网定位系统 | |
| JPWO2018116493A1 (ja) | 配置サーバ、警備システム、警備員配置方法及びプログラム | |
| JP4882431B2 (ja) | 迷子探索プログラムおよび迷子探索方法 | |
| CN111182013A (zh) | 空间数字化平台系统及构建方法、交互方法、装置及设备 | |
| JP3337586B2 (ja) | 移動体の位置検出システム | |
| JP2010091433A (ja) | 現在地特定装置、現在地特定システム、現在地特定方法、及びコンピュータプログラム | |
| JP4705322B2 (ja) | 持ち物管理装置、持ち物管理方法及び持ち物管理システム | |
| GB2559336A (en) | Monitoring building occupancy | |
| JP2010021700A (ja) | コミュニケーション検出システム及びコミュニケーション検出装置 | |
| JP4090804B2 (ja) | コードレス識別保安システム及び方法 | |
| KR101757529B1 (ko) | 모바일 비콘과 모바일 애플리케이션을 활용한 위치 추적 방법 및 시스템 | |
| JP7454801B2 (ja) | 位置特定システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050512 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050520 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050719 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051021 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051107 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111111 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121111 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131111 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |