JP3734443B2 - Ultrasonic diagnostic equipment - Google Patents
Ultrasonic diagnostic equipment Download PDFInfo
- Publication number
- JP3734443B2 JP3734443B2 JP2001393151A JP2001393151A JP3734443B2 JP 3734443 B2 JP3734443 B2 JP 3734443B2 JP 2001393151 A JP2001393151 A JP 2001393151A JP 2001393151 A JP2001393151 A JP 2001393151A JP 3734443 B2 JP3734443 B2 JP 3734443B2
- Authority
- JP
- Japan
- Prior art keywords
- interest
- frame
- point
- unit
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Description
【0001】
【発明の属する技術分野】
本発明は超音波診断装置に関する。
【0002】
【従来の技術】
心臓病等の診断において、臓器組織の運動を正確に測定することは重要である。このような目的に対して、従来の超音波診断装置では、カラードップラー法による速度検出が提案されている。
【0003】
カラードップラー法は、運動する組織に向けて発射した超音波ビームに対する受信エコー信号の、ドップラー効果による運動速度に応じた波長の偏移(ドップラーシフト)を検出し、ドップラーシフトから算出した当該組織の速度と運動の方向を色分けして表示する技術である。
【0004】
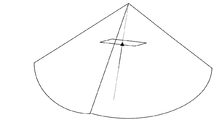
しかし、ドップラーシフトから算出可能な速度成分は、超音波ビームの進行方向と同一の成分のみであり、超音波ビームの進行方向に対して垂直な速度成分は測定不能である。図11は超音波で心臓をスキャンして得られた画像である。扇形の領域1101はスキャン範囲で、扇形の中心から半径方向に伸びている破線1103は、心臓組織のある地点の速度を検出する際に放出した超音波ビームの進行方向である。図11のように超音波ビームで心臓1102をスキャンして速度を検出しようとした場合、心臓組織の実際の運動方向が矢印1105方向であったとしても、検出されるドップラー速度は矢印1104方向の超音波信号の進行方向の速度成分である。従って、超音波ビームに対して垂直方向に運動する組織は、あたかも運動していないように見えてしまう。つまり、測定される速度値が超音波ビームと組織の運動方向の関係に依存するという問題がある。
【0005】
これに対して特開平6−114059号公報では、プローブの開口を2領域に分割し、異なる角度の超音波ビームを形成することで、本来の2次元速度ベクトルを得る方法や、組織の輪郭を抽出して運動方向を仮定して速度ベクトルを推定する方法が開示されている。
【0006】
しかしながら、プローブの開口を2領域に分割して形成した超音波ビームのなす角度の差は僅少であり、算出された速度ベクトルは誤差を含みやすいという問題がある。また、推定された速度ベクトルも必ずしも正しいとは限らない。
【0007】
一方、特開2000−217818号公報では、画像パターンにより心臓の弁輪部分をテンプレートマッチングで追跡する手法が提案されているが、特徴の不明瞭な部位では追跡の精度が劣り、また複数の部位を同時に追跡するためには多くの処理時間を要するという問題があった。
【0008】
【発明が解決しようとする課題】
従来の超音波診断装置では、人体の組織や臓器の運動を正確に調べると演算量が膨大になり処理時間を多く必要としていた。また、特徴的な形状を目印に追跡を行うために、特徴に乏しい点を追跡する場合は、追跡の精度が悪くなるという問題もあった。
【0009】
本発明では、臓器組織の任意の領域を2次元ないし3次元的に精度良くかつ高速に追跡でき、2次元ないし3次元速度を精度良くかつ高速に求めることができる超音波診断装置を提供することにある。
【0010】
【課題を解決するための手段】
上記課題を解決するため、本発明の超音波診断装置は、被検体に超音波ビームを発射してエコー信号を受信する走査部と、前記エコー信号からフレーム単位の被検体画像を順次生成して出力する画像生成部と、前記エコー信号の周波数偏移を検出して被検体各点の超音波ビーム進行方向成分の速度であるドップラー速度を検出する速度検出部と、前記被検体画像及び被検体各点の前記ドップラー速度を順次記憶しておくフレームメモリと、第Nフレーム(Nは自然数)内の被検体各点の移動先を第N+nフレーム(N、nともに自然数)内で探索して移動先の座標データを求める探索部と、前記被検体画像を表示する表示部と、前記移動先の座標データを外部に順次出力する運動情報出力部とを有し、前記探索部は、前記第N+nフレーム内での移動先の探索を行う範囲を、第Nフレームの被検体各点について検出した前記ドップラー速度によって限定される領域に設定することを特徴とする。
【0011】
さらに、本発明の超音波診断装置は、第Nフレームの被検体各点の座標データとこれらの移動先の座標データを用いて第Nフレーム目の被検体各点における速度ベクトルを算出する速度ベクトル算出部を有し、前記運動情報出力部は前記速度ベクトルを外部に順次出力することを特徴としてもよい。
【0012】
本発明によれば、被検体各点を追跡して速度ベクトルを検出する際に、探索範囲を限定することが可能なために少ない演算量で探索が行えるので、速度ベクトル検出の精度を維持しつつ処理を高速化することができる。
【0013】
【発明の実施の形態】
図8は本発明の第1の実施形態乃至第3の実施形態の超音波診断装置の主な機能とそれを実現するための主な処理を説明する流れ図である。各実施形態ごとの機能及び詳細な構成等に関してはそれぞれの実施形態の説明時に行う。本発明の特徴的な点は、フレーム間でのブロックマッチングにより心臓組織各点の移動先を求める際に、エコー信号のドップラーシフトから求まるドップラー速度を利用してブロックマッチングによる探索範囲を設定して行っている点である。これにより、心臓組織各点の高精度な追跡と高速処理を両立することができる。また、各点の追跡を高精度かつ高速に行えるので、各点の速度ベクトルも精度を高く維持しつつ高速に求めることが可能となっている。
【0014】
(第1の実施形態)図1は本発明の第1の実施形態の超音波診断装置の構成を表すブロック図である。本実施形態の超音波診断装置は心臓を撮像し、心臓組織各部分の運動の大きさ(速度)に応じて色付けを行ったカラーコーディング画像を表示する装置である。
【0015】
本実施形態の超音波診断装置は、(1)心臓組織のBモード画像の取得及び心臓組織各点の超音波ビームの進行方向成分の速度(ドップラー速度)の検出のために心臓組織に超音波ビームを発射してエコー信号を受け取る処理と、(2)エコー信号からBモード画像を取得する処理と、(3)エコー信号のドップラーシフトを検出して心臓組織各点のドップラー速度を求める処理と、(4)ブロックマッチングで心臓組織各点の移動先の座標を求め、移動ベクトルを求める処理と、(5)心臓組織各点の速度ベクトルを求めて速度ベクトルに応じた色を割り当てたカラーコーディング画像を生成して、これをBモード画像に重ねて表示する処理とを行う。
【0016】
上記処理を行うために、本実施形態の超音波診断装置は超音波ビームの送受信を行う超音波プローブ101と、プローブの駆動と得られたエコー信号を処理するプローブ駆動・エコー信号処理部102と、エコー信号からBモード画像生成するBモード用DSC(デジタルスキャンコンバータ)部103とを有する。本装置はさらに、エコー信号から心臓組織各部分のドップラー速度を検出する速度検出部105と、Bモード画像及び画像のフレーム番号及びドップラー速度を順次蓄積するフレームメモリ104と、得られた速度をもとに心臓組織各点の次フレームにおける移動先の座標を求める探索部106と、得られた座標をもとに速度ベクトルを求めて、心臓組織各点の速度ベクトルの方向と大きさに応じて色を割り当てたカラーコーディング画像を生成する解析部107と、本装置の使用者から命令を受けるためのインターフェースであるグラフィカルインターフェース(GUI)を生成し、カラーコーディング画像とBモード画像をGUI上に合成して出力する制御部108と、速度検出スキャン範囲を決定・制御する速度スキャン範囲設定部109と、制御部108から出力されたGUIを画面に表示する表示部110から構成される。
【0017】
超音波プローブ101はプローブ駆動・エコー信号処理部102からの駆動信号によって駆動されるトランスデューサーを内蔵する。トランスデューサーは駆動信号を受けて超音波信号を心臓に向けて発する。心臓組織各部分によって反射された超音波信号はトランスデューサーが受信して電気信号(エコー信号)に変換する。
【0018】
超音波プローブ101のトランスデューサーは短冊状の複数の圧電振動子を一列に配列した構成になっている。各圧電振動子はプローブ駆動・エコー信号処理部102からの駆動信号によって振動して超音波信号を発生させる。短冊状の複数の圧電振動子各々に対する各駆動信号の遅延時間を制御することにより、超音波信号の発射方向を変えられるようになっていて、スキャン方向を自在に変えることができる。
【0019】
プローブ駆動・エコー信号処理部102は、超音波プローブ101を制御して、画像取得スキャンと速度検出スキャンの2回のスキャンを1セットにして行わせる。2回のスキャンはいずれも2次元スキャン(人体組織の断層スキャン)を行う。そして、超音波プローブ101から戻ってきたそれぞれのエコー信号に対して検波処理を施す。そして、Bモード用DSC部103には画像取得用エコー信号とフレーム番号(1セットのスキャンで得られる1フレームの画像ごとに付するフレーム番号N)を、速度検出部105には速度検出用エコー信号とフレーム番号Nを出力する。
【0020】
プローブ駆動・エコー信号処理部102は超音波プローブ101を制御して、1セットのスキャンを一定の時間間隔Δt毎に開始するように動作させる。
【0021】
速度検出スキャンは画像取得スキャンよりも狭い範囲のスキャンなので、プローブ駆動・エコー信号処理部102は、速度スキャン範囲設定部109から本装置の使用者が指定した速度スキャン範囲の中心点の座標データを読み出して、超音波プローブ101へ出力する駆動信号の遅延時間の制御を変更して速度検出スキャン範囲を変更する。後述の通り、本装置の使用者はポインティングデバイスを用いて速度検出スキャン範囲を変える事ができる。
【0022】
プローブ駆動・エコー信号処理部102はスキャンして得られたエコー信号に対しても、駆動信号に施した遅延時間制御に対応する遅延処理を施して、スキャン方向に超音波ビームを絞って放出した際に得られるエコー信号と等価なエコー信号に変換する。
【0023】
Bモード用DSC部103は、画像取得スキャンで得られたエコー信号を画像に変換する。本実施形態の超音波診断装置はセクタスキャンを行うので、エコー信号から得られる心臓組織各点の情報はプローブ位置を中心とする扇形の半径方向を1行とし、角度方向を列とする2次元配列に格納される。そこで、通常のテレビと同じ画像(Bモード画像)になるように、情報を並べ替えてBモード画像に変換する。Bモード用DSC部103は、Bモード画像とフレーム番号Nをフレームメモリ104に出力して順次記憶させる。
【0024】
一方、速度検出部105は速度検出スキャンで得られたエコー信号のドップラーシフトを検出して、心臓組織各点のドップラー速度を求め、フレームメモリ104に順次記憶させる。
【0025】
速度検出部105は、速度スキャン範囲設定部109から関心速度帯を読み込んで関心速度帯に応じたフィルタを選択し、エコー信号に対してフィルタをかけて所定の範囲の大きさの速度成分を効率よく検出できるようにする。心臓を診断対象とする場合、運動速度は「心筋<弁<血流」であるから、心筋の運動情報を調べる際にはローパスフィルタをかけ、血流を調べる際にはハイパスフィルタをかければよい。さらに速度検出部105は、フィルタを通したエコー信号に対してFFT(高速フーリエ変換)や自己相関法等の周波数解析を行って平均速度、分散値、最大速度などを計算する。計算した心臓組織各点のドップラー速度のデータをフレームメモリ104に出力する。
【0026】
探索部106では、フレームメモリ104に蓄積された連続する2フレーム(Nフレーム目とN+1フレーム目)のBモード画像間で、ブロックマッチング処理を用いて速度検出スキャン範囲内の心臓組織各部分の移動先の座標を調べて移動ベクトルを求める。ただし、Nフレーム目及びN+1フレーム目に関してBモード画像の取得とドップラー速度の検出の両方が完了して、フレームメモリ104にBモード画像及びドップラー速度が蓄積されていない場合は処理を中断して蓄積されるまで待機する。
【0027】
探索部106は、ブロックマッチング処理に先立って、フレームメモリ104から読み込んだNフレーム目の速度検出スキャン範囲内の心臓組織各部分のドップラー速度と、所定のフレーム間時間間隔Δtから、速度検出スキャン範囲内の心臓組織各部分について、N+1フレーム目におけるブロックマッチングの探索範囲を設定する。
【0028】
ブロックマッチングの探索範囲の設定方法を図2を用いて説明する。図2は速度検出スキャン範囲内の心臓組織のある点(注目地点)が線分abを通る超音波信号で速度検出スキャンされる場合の図である。時刻tにおいて、注目地点のドップラー速度の大きさがvだったとすると、時刻t+Δtにおける注目地点の存在位置は注目地点から超音波信号の進行方向にΔL=v・Δt移動した点を通り、超音波信号の進行方向(図2の線分ab)に垂直な線上(図2の線分cd)の「どこか」にあると予測することができる(予測移動領域)。従って、探索部106は、Nフレーム目(時刻t)における注目地点のドップラー速度がvである場合、N+1フレーム目(時刻t+Δt)では、Nフレーム目の注目地点から超音波信号の進行方向にΔL=v・Δt移動した点を通る超音波信号の進行方向に対する垂線を予測移動領域に設定し、この垂線を探索領域に設定する。尚、本実施例ではドップラー速度vは、速度検出部105で求めたドップラー速度のデータのうち、平均速度を用いるものとする。
【0029】
探索範囲を設定した後、注目地点の移動先の座標を調べるために、探索部106はフレームメモリ104からNフレーム目の画像とN+1フレーム目の画像を読み込む。そして、Nフレーム目の注目地点周辺の画像と、N+1フレーム目に関して設定された探索範囲の画像との間でマッチングを行う。
【0030】
図5は実際のマッチングを説明する図である。領域fはNフレーム目の注目地点を中心としたa×b画素の大きさの領域である。領域gはN+1フレーム目の探索範囲内の探索対象点を中心としたa×b画素の大きさの領域である。図5に示すように、領域fと領域gとでブロックマッチングを行う。ブロックマッチングは、領域fと、探索範囲内の全探索対象点について抽出した領域g相当の領域との間で行い、数1の式で計算される相互相関値Cが最も高くなる点を探すことで行う。
【0031】
【数1】

本実施形態ではa=b=16とする。尚、本実施形態では輝度値の相互相関値を用いる例を示したが、輝度値の差分絶対値和を用いる方法等、一般にパターンマッチングやブロックマッチングに利用される方法を用いることができる。
【0033】
探索部106は、上記のブロックマッチングをNフレーム目の速度検出スキャン範囲内の心臓組織各部分について行って、速度検出スキャン範囲内の心臓組織各部分の移動先の座標を求める。移動元の座標と求めた移動先の座標から移動ベクトルを計算して、求めた移動ベクトル全てとフレーム番号Nを解析部107へ出力する。
【0034】
解析部107では、探索部106で求めた移動ベクトルをフレーム間時間間隔Δtで除して、速度検出スキャン範囲内の心臓組織各部分の速度ベクトルを求める。そして、速度検出スキャン範囲内の心臓組織各部分毎に求められた速度ベクトルを、ベクトルの大きさと方向に応じた色相に変換したカラーコーディング画像を生成し、フレーム番号Nとともに制御部108へ出力する。
【0035】
制御部108は、CPUとメモリを内蔵し、ポインティングデバイスからの入力を受け、本装置の使用者が本装置の設定を行うためのインターフェースであるグラフィカルユーザーインターフェース(GUI)を生成し、ポインティングデバイスのポインタとともに表示する。GUI上には速度スキャン範囲設定部109から読み出した関心速度帯の情報が表示されている。制御部108は、解析部107から出力されたフレーム番号Nに対応するBモード画像をフレームメモリ104から読み込み、Bモード画像上に解析部107で生成したカラーコーディング画像重ねた画像を生成する。生成した画像は、N−1フレーム目の画像を表示してからフレーム間時間間隔Δt経過後に、GUI上に設けた画像表示部分を更新して表示する。さらに制御部108は、速度スキャン範囲設定部109から速度検出スキャン範囲を読み込んで速度検出スキャン範囲を表す枠を生成し、GUI上の画像表示部分に重ねて表示する。本装置の使用者は、制御部108に接続されたポインティングデバイスを用いてこの枠を動かすことで、速度検出スキャン範囲をインタラクティブかつリアルタイムに設定することができる。
【0036】
制御部108は、枠の移動を検出した場合は枠を新しく描画しなおすとともに、新たな枠に対応する速度検出スキャン範囲を計算して速度スキャン範囲設定部109に出力する。
【0037】
また、制御部108は、使用者がGUI上で設定した関心速度帯を速度スキャン範囲設定部109に出力する。
【0038】
速度スキャン範囲設定部109は、制御部108から入力された新たな速度検出スキャン範囲と関心速度帯を記憶する。速度検出スキャン範囲の変更があった場合は、前述の通り、速度スキャン範囲設定部109はプローブ駆動・エコー信号検出部102に制御信号を送って速度検出スキャン範囲の変更を反映させる。関心速度帯に変更があった場合は、前述の通り、速度検出部105に制御信号を送って関心速度帯の変更を反映させる。
【0039】
以上、本発明の第1の実施形態によれば、ドップラー速度を用いてブロックマッチング処理を行う範囲を限定しているので、従来より高速な速度検出処理を行うことが可能である。
【0040】
尚、本実施形態では、探索部106で設定する探索範囲の形状は図2の線分cdのように線状であるが、ドップラー速度の誤差を考慮して予測移動領域に幅を持たせて、図3のように探索範囲をΔLを中心とする長方形の領域で設定しても良い。このように設定すれば、移動ベクトル及び速度ベクトルをより精度よく求めることができる。この場合、ドップラー速度の誤差は、速度検出部105で求めたドップラー速度のデータのうち、分散値と最大速度を利用して決めればよい。
【0041】
また、本実施形態ではセクタスキャンを用いているので、フレームに超音波スキャンの範囲外の領域も含まれている。そこで、図4のように、予測移動領域と超音波による画像取得スキャン範囲が重なる範囲を探索範囲として設定しても良い。このように設定すれば、画像データのない領域に対する無駄なブロックマッチング処理を行わずに済むので、演算量を削減でき、高速処理が可能となる。
【0042】
さらに、本実施形態では断層スキャンを行っているので予測移動領域は2次元形状であるが、超音波プローブ101として2次元アレイ超音波プローブを用いて心臓を3次元スキャンする場合は、探索部106で予測する予測移動領域は超音波信号の進行方向に垂直な面で定義される。従って、探索範囲は図6および図7に示すように面もしくは誤差を考慮して3次元領域で設定すれば良い。3次元領域としては図7に示した直方体状領域だけでなく、円柱状領域を用いても構わない。尚、3次元スキャンを行った場合は速度ベクトルを3次元で求めることが可能になる。心臓は3次元立体構造であるから、心臓各部分の運動も3次元的である。よって、3次元速度ベクトルを求めることができれば、より正確な運動を調べることが可能である。
【0043】
(第2の実施形態)図9は本発明の第2の実施形態の超音波診断装置の構成を表すブロック図である。本実施形態の超音波診断装置は心臓を撮像し、心臓組織のうち、本装置の使用者が設定した注目地点の運動の軌跡を表示する装置である。
【0044】
本実施形態の超音波診断装置は、(1)心臓組織のBモード画像の取得及び心臓組織各点の超音波ビームの進行方向成分の速度(ドップラー速度)の検出のために心臓組織に超音波ビームを発射してエコー信号を受け取る処理と、(2)エコー信号からBモード画像を取得する処理と、(3)エコー信号のドップラーシフトを検出して心臓組織各点のうち、ドップラー速度を求める処理と、(4)心臓組織各点のうち本装置の使用者が指定した注目地点の移動先の座標をブロックマッチングで求め、移動ベクトルを求める処理と、(5)注目地点の移動ベクトルを順次蓄積して、移動ベクトルから注目地点の軌跡を描いた画像を生成して、これをBモード画像とともに表示する処理とを行う。
【0045】
上記処理を実現するために、本実施形態の超音波診断装置は超音波プローブ101とプローブ駆動・エコー信号処理部102とBモード用DSC(デジタルスキャンコンバータ)部103と、フレームメモリ104と、速度検出部105と、探索部106と、解析部107と、制御部108と、表示部110と、注目地点設定部111から構成される。本実施形態の超音波診断装置は、第1の実施形態の超音波診断装置の速度スキャン範囲設定部109に代えて注目地点設定部111を用いている。尚、第1の実施形態の超音波診断装置と機能、構成が同一の部分については説明を省略する。また、以下は注目地点が1つの場合について説明する。
【0046】
プローブ駆動・エコー信号処理部102は、Nフレーム目の速度検出スキャンを行う前に注目地点設定部111からN−1フレーム目の注目地点の座標を読み込む。注目地点の座標が速度検出スキャン範囲の中心から所定の閾値以上離れている場合は、注目地点が速度検出スキャン範囲の中央に位置するように速度検出スキャン範囲を修正する。
【0047】
探索部106は、注目地点設定部111からNフレーム目の注目地点の座標を読み込み、注目地点の移動先の座標を求める。第1の実施形態と同様にして探索範囲を限定し、ブロックマッチング法でN+1フレーム目の画像の探索範囲との比較を行い数1に基づいて計算した相互相関値が最も高い地点を移動先とする。ブロックマッチングの際のマッチング単位は、注目地点を中心とする16×16画素の正方形の領域とする。
【0048】
探索部106は、フレーム番号N+1と注目地点の移動先の座標を注目地点設定部111に出力し、さらに、注目地点の移動元と移動先の座標から注目地点の移動ベクトルを計算して、移動ベクトルとフレーム番号N+1を解析部107へ出力する。
【0049】
解析部107は、探索部106から受け取った注目地点の移動ベクトルとフレーム番号N+1を解析部107の内部で順次蓄積しておく。また、これまでに蓄積してきた注目地点の移動ベクトルと注目地点設定部111から与えられた注目地点の座標の初期値を用いて注目地点の運動の軌跡を表す画像を作成する。作成した軌跡画像はフレーム番号N+1とともに制御部108へ出力する。
【0050】
制御部108は、解析部107からのフレーム番号Nに対応するBモード画像をフレームメモリ104から読み込み、N−1フレーム目の画像を表示してからフレーム間時間間隔Δt経過後に、GUI上に設けた画像表示部分を更新する。制御部108は、解析部107で生成した注目地点の軌跡の画像をGUI上に合成する。制御部108は、注目地点設定部111からNフレーム目の注目地点の座標を読み込んで注目地点を表すマークを生成し、GUI上の画像表示部分のBモード画像と合成する。本装置の使用者は、制御部108に接続されたポインティングデバイスを用いてこのマークを動かすことで、注目地点をインタラクティブかつリアルタイムに設定することができる。
【0051】
制御部108は、本装置の使用者によるマークの移動を検出した場合は、新たなマークに対応する注目地点の座標を計算して注目地点設定部111に出力する。
【0052】
また、制御部108は、使用者がGUI上で設定した関心速度帯を注目地点設定部111に出力し、注目地点設定部111は注目地点設定部111が記憶している関心速度帯を更新する。
【0053】
表示部110は制御部108で生成したGUIを画面上に表示する。
【0054】
注目地点設定部111は、探索部106からのフレーム番号及び注目地点の座標を順次記憶する。プローブ駆動・エコー信号処理部102及び探索部106が注目地点の座標データを注目地点設定部111から読み込もうとした場合に、プローブ駆動・エコー信号処理部102及び探索部106がそれぞれ示したフレーム番号に対応する注目地点の座標のデータを提供する。これにより、時々刻々移動する注目地点を自動的に追跡することが可能となっている。
【0055】
尚、注目地点設定部111は、制御部108から新たな注目地点の座標が入力された場合(すなわち使用者が注目地点を変更した場合)は、入力直後にスキャンするフレームから注目地点の変更を反映させる。具体的には、注目地点設定部111で順次記憶した注目地点の座標を制御部108からの新しい注目地点の座標で更新する。更新後に最初にプローブ駆動・エコー信号処理部102が参照した注目地点の座標に関連付けられたフレーム番号(Mとする)を記憶しておき、フレーム番号Mまでの注目地点の座標に関しては、注目地点設定部111は探索部106から出力される注目地点の更新データを無視する。注目地点設定部111は探索部106からフレーム番号M+1以降の注目地点の更新データが入力された時点で、解析部107へ制御信号と注目地点の初期値(フレーム番号Mの注目地点。すなわち使用者が設定した注目地点の座標)を送信して今まで解析部107が蓄積していた移動ベクトルを消去させて、使用者が設定した注目地点の座標を初期値とする軌跡画像を作成させるようにする。
【0056】
注目地点が2以上ある場合について説明する。プローブ駆動・エコー信号処理部102は注目地点設定部111から注目地点の座標を読み出す時に注目地点の個数を調べてから全注目地点の座標を読み出す(ここでは注目地点が2つの場合を例にとる)。プローブ駆動・エコー信号処理部102は2つの注目地点の座標と1回の速度検出スキャンの範囲を比較して、一回の速度検出スキャン範囲内でカバーできる場合は、注目地点の座標の平均座標を計算してスキャン範囲を決定する。速度検出スキャン範囲でカバーできない場合は、速度検出スキャン範囲を半分にして各注目地点ごとにスキャンを行う。ただし、分割数が増えるとスキャン範囲が狭くなり過ぎて、マッチング処理の精度が悪くなるので、空間的な分割は3分割までとし、これ以上の分割が必要な場合は時間的な分割を行う(例えば1フレームおきにスキャンを行うようにする)。これにより注目地点が複数存在する場合でも追跡が可能である。
【0057】
本実施形態では注目地点の座標データを超音波診断装置内でのみ利用したが、制御部108に注目地点の座標データを外部に順次出力する端子(図示せず)を設けておき、ワークステーション等でも座標データを蓄積し解析できるようにしておくと一層良い。こうすることで、座標データを外部のワークステーション等に記録しておいて過去に取得したデータと比較することが可能なので、診断を行う際に有用である。
【0058】
以上、本発明の第2の実施形態によれば、ドップラー速度を用いてブロックマッチング処理を行う範囲を限定しているので、注目地点の移動先の座標を精度を落とさずに従来より高速に求めることができる。
【0059】
また、使用者が設定した注目地点を自動的に追跡して注目地点の軌跡を描くことが可能なので、従来より運動の様子を詳細に調べることができる。
【0060】
(第3の実施形態)図10を用いて本発明の第3の実施形態の超音波診断装置を説明する。本実施形態の超音波診断装置は心臓を撮像し、心臓組織のうち、本装置の使用者が設定した注目地点の速度の時間変化をグラフとして表現する装置である。
【0061】
本実施形態の超音波診断装置は、(1)心臓組織のBモード画像の取得及び心臓組織各点の超音波ビームの進行方向成分の速度(ドップラー速度)の検出のために心臓組織に超音波ビームを発射してエコー信号を受け取る処理と、(2)エコー信号からBモード画像を取得する処理と、(3)エコー信号のドップラーシフトを検出して心臓組織各点のドップラー速度を求める処理と、(4)ブロックマッチングで心臓組織各点のうち本装置の使用者が設定した注目地点の移動先の座標を求めて移動ベクトルを求める処理と、(5)移動ベクトルから速度を求めてこれを順次蓄積し、速度ベクトルの時間変化グラフを生成して、Bモード画像とともに表示する処理とを行う。
【0062】
上記処理を行うために、本実施形態の超音波診断装置は超音波プローブ101とプローブ駆動・エコー信号処理部102とBモード用DSC(デジタルスキャンコンバータ)部103と、フレームメモリ104と、速度検出部105と、探索部106と、解析部107と、制御部108と、注目地点設定部111と、表示部110から構成される。以下の説明では、第2の実施形態の超音波診断装置と機能、構成が同一の部分については説明を省略する。また、以下は注目地点が1つの場合について説明する。
【0063】
探索部106は、注目地点設定部111から注目地点座標を読み込み、注目地点の移動先の座標を求める。第1の実施形態と同様にして探索範囲を限定し、ブロックマッチング法でN+1フレーム目の画像の探索範囲との比較を行い数1に基づいて計算した相互相関値が最も高い地点を移動先とする。尚、マッチング単位となるブロックは16×16画素の正方形の領域である。
【0064】
探索部106は、フレーム番号N+1と注目地点の移動先の座標を注目地点設定部111に出力し、さらに、注目地点の移動元と移動先の座標から注目地点の移動ベクトルを計算して、移動ベクトルとフレーム番号Nを解析部107へ出力する。
【0065】
解析部107は、探索部106から受け取った注目地点の移動ベクトルをフレーム間時間間隔Δtで除して速度ベクトルを求める。フレーム番号Nと求めた速度ベクトルは解析部107の内部で順次蓄積しておく。また、これまでに蓄積してきた注目地点の速度ベクトルを用いて注目地点の速度の時間変化を表すグラフを作成する。作成したグラフはフレーム番号Nとともに制御部108へ出力する。
【0066】
制御部108は、解析部107からのフレーム番号Nに対応するBモード画像をフレームメモリ104から読み込み、N−1フレーム目の画像を表示してからフレーム間時間間隔Δt経過後に、GUI上に設けた画像表示部分を更新する。制御部108は、解析部107で生成した注目地点の速度の時間変化グラフをGUI上に合成する。制御部108は、注目地点設定部111からNフレーム目の注目地点の座標を読み込んで注目地点を表すマークを生成し、GUI上の画像表示部分のBモード画像と合成する。本装置の使用者は、制御部108に接続されたポインティングデバイスを用いてこのマークを動かすことで、注目地点をインタラクティブかつリアルタイムに設定することができる。
【0067】
制御部108は、本装置の使用者によるマークの移動を検出した場合は、新たなマークに対応する注目地点の座標を注目地点設定部111に出力する。
【0068】
また、制御部108は、使用者がGUI上で設定した関心速度帯を注目地点設定部111に出力し、注目地点設定部111は注目地点設定部111が記憶している関心速度帯を更新する。
【0069】
表示部110は制御部108で生成したGUIを画面上に表示する。
【0070】
注目地点設定部111は、探索部106からのフレーム番号及び注目地点の座標を順次記憶する。プローブ駆動・エコー信号処理部102及び探索部106が注目地点の座標データを注目地点設定部111から読み込もうとした場合に、プローブ駆動・エコー信号処理部102及び探索部106がそれぞれ示したフレーム番号に対応する注目地点の座標のデータを提供する。これにより、時々刻々移動する注目地点を自動的に追跡することが可能となっている。
【0071】
尚、注目地点設定部111は、制御部108から新たな注目地点の座標が入力された場合(すなわち使用者が注目地点を変更した場合)は、入力直後にスキャンするフレームから注目地点の変更を反映させる。具体的には、注目地点設定部111で順次記憶した注目地点の座標全てを制御部108からの新しい注目地点の座標で更新する。更新後に最初にプローブ駆動・エコー信号処理部102が参照した注目地点の座標に関連付けられたフレーム番号(Mとする)を記憶しておき、フレーム番号Mまでの注目地点の座標に関しては、注目地点設定部111は探索部106から出力される注目地点の更新データを無視する。注目地点設定部111は探索部106からフレーム番号M+1以降の注目地点の更新データが入力された時点で、解析部107へ制御信号を送信して今まで解析部107が蓄積していた速度ベクトルを消去させて、新たに速度の時間変化グラフを作成させる。
【0072】
本実施形態では注目地点の速度ベクトルデータを超音波診断装置内でのみ使用したが、制御部108に注目地点の速度ベクトルを外部に順次出力する端子(図示せず)を設けておき、ワークステーション等でも速度ベクトルを蓄積し解析できるようにしておくと一層良い。こうすることで、過去のデータとの対比が容易になるので、診断を行う上で有用となる。
【0073】
以上、本発明の第3の実施形態によれば、注目地点のフレーム間での移動ベクトルを求め、これをもとに速度ベクトルを算出しているので、注目地点の速度を精度良くかつ従来よりも高速に求めることができる。さらに、使用者が設定した注目地点を自動的に追跡して速度検出スキャンの範囲を設定するので、従来より速度検出スキャン範囲を狭くすることが可能であり、スキャン間隔を短くして速度変化を詳細に調べるという使い方も可能となっている。
【0074】
【発明の効果】
以上、本発明によれば対象物の本来の2次元または3次元運動を精度良く高速に追跡することができ、2次元または3次元の移動ベクトル及び速度ベクトルを得ることが可能となる。このことにより、対象物の運動をより正確にとらえることができ、医用分野においてはより早くかつ正確な診断が可能となる。
【図面の簡単な説明】
【図1】 本発明の第1の実施形態の構成を説明するブロック図。
【図2】 ドップラーシフトから算出した速度から推測される実際の速度の候補を示す図(探索範囲の第1の設定例)。
【図3】 探索範囲の第2の設定例。
【図4】 探索範囲の第3の設定例。
【図5】 (a)ブロックマッチング処理におけるNフレーム目の扱いを説明する図。(b)ブロックマッチング処理におけるN+1フレーム目の扱いを説明する図。
【図6】 3次元走査を行っている際に3次元速度を求める場合の探索範囲の第1の設定例。
【図7】 3次元走査を行っている際に3次元速度を求める場合の探索範囲の第2の設定例。
【図8】 注目地点の移動先座標の算出処理及び算出した移動先座標の利用例を説明するフローチャート。
【図9】 本発明の第2の実施形態の構成を説明するブロック図。
【図10】 本発明の第3の実施形態の構成を説明するブロック図。
【図11】 ドップラーシフトから算出した速度と実際の速度の違いを説明する図。
【符号の説明】
101 超音波プローブ
102 プローブ駆動・エコー信号処理部
103 Bモード用DSC部
104 フレームメモリ
105 速度検出部
106 探索範囲算出部
107 トラッキング部
108 制御部
109 速度スキャン範囲設定部
110 表示部
111 注目地点設定部[0001]
BACKGROUND OF THE INVENTION
The present invention relates to an ultrasonic diagnostic apparatus.
[0002]
[Prior art]
In the diagnosis of heart disease and the like, it is important to accurately measure the movement of organ tissues. For this purpose, speed detection by the color Doppler method has been proposed in conventional ultrasonic diagnostic apparatuses.
[0003]
The color Doppler method detects a wavelength shift (Doppler shift) according to the motion speed due to the Doppler effect of the received echo signal for the ultrasonic beam emitted toward the moving tissue, and calculates the tissue calculated from the Doppler shift. It is a technology that displays the speed and direction of motion in different colors.
[0004]
However, the velocity component that can be calculated from the Doppler shift is only the same component as the traveling direction of the ultrasonic beam, and the velocity component perpendicular to the traveling direction of the ultrasonic beam cannot be measured. FIG. 11 is an image obtained by scanning the heart with ultrasound. A fan-
[0005]
On the other hand, Japanese Patent Laid-Open No. 6-114059 discloses a method for obtaining an original two-dimensional velocity vector by dividing an opening of a probe into two regions and forming an ultrasonic beam with different angles, and a tissue contour. A method of extracting and estimating a velocity vector assuming a motion direction is disclosed.
[0006]
However, there is a problem that the difference between the angles formed by the ultrasonic beam formed by dividing the probe opening into two regions is small, and the calculated velocity vector is likely to contain an error. Also, the estimated velocity vector is not always correct.
[0007]
On the other hand, Japanese Patent Laid-Open No. 2000-217818 proposes a method for tracking the annulus portion of the heart by template matching based on an image pattern. However, the tracking accuracy is inferior in a region where the feature is unclear, and there are a plurality of regions. There is a problem that it takes a lot of processing time to track the two simultaneously.
[0008]
[Problems to be solved by the invention]
In a conventional ultrasonic diagnostic apparatus, if the movement of a human tissue or organ is accurately examined, the amount of calculation becomes enormous and a long processing time is required. In addition, since tracking is performed using a characteristic shape as a mark, there is also a problem that tracking accuracy deteriorates when tracking a point with poor characteristics.
[0009]
The present invention provides an ultrasonic diagnostic apparatus capable of tracking an arbitrary region of an organ tissue in a two-dimensional or three-dimensional manner with high accuracy and at high speed, and capable of obtaining a two-dimensional or three-dimensional velocity with high accuracy and high speed. It is in.
[0010]
[Means for Solving the Problems]
In order to solve the above problems, an ultrasonic diagnostic apparatus according to the present invention sequentially generates a subject image in units of frames from a scanning unit that emits an ultrasonic beam to a subject and receives an echo signal, and the echo signal. An output image generation unit; a velocity detection unit that detects a frequency shift of the echo signal and detects a Doppler velocity that is a velocity of an ultrasonic beam traveling direction component at each point of the subject; and the subject image and the subject A frame memory that sequentially stores the Doppler velocities of each point, and a movement destination of each point of the subject in the Nth frame (N is a natural number) is searched and moved in the N + n frame (N and n are both natural numbers). A search unit that obtains the previous coordinate data; a display unit that displays the subject image; and an exercise information output unit that sequentially outputs the coordinate data of the movement destination to the outside, wherein the search unit includes the N + nth In frame The range for the destination search, and setting the region defined by the Doppler velocity detected for the subject each point of the N-th frame.
[0011]
Furthermore, the ultrasonic diagnostic apparatus of the present invention uses the coordinate data of each point of the subject in the Nth frame and the coordinate data of these movement destinations to calculate a velocity vector at each point of the subject in the Nth frame. It has a calculation part, and the motion information output part is characterized by outputting the speed vector sequentially outside.
[0012]
According to the present invention, when detecting the velocity vector by tracking each point of the subject, the search range can be limited, so that the search can be performed with a small amount of computation, so that the accuracy of the velocity vector detection is maintained. The processing can be speeded up.
[0013]
DETAILED DESCRIPTION OF THE INVENTION
FIG. 8 is a flowchart for explaining main functions of the ultrasonic diagnostic apparatus according to the first to third embodiments of the present invention and main processes for realizing the functions. The function and detailed configuration of each embodiment will be described when describing each embodiment. A characteristic feature of the present invention is that when a movement destination of each point of heart tissue is obtained by block matching between frames, a search range by block matching is set by using a Doppler speed obtained from a Doppler shift of an echo signal. It is a point to go. Thereby, it is possible to achieve both high-precision tracking of each point of the heart tissue and high-speed processing. Further, since each point can be tracked with high accuracy and high speed, the speed vector of each point can be obtained at high speed while maintaining high accuracy.
[0014]
(First Embodiment) FIG. 1 is a block diagram showing the configuration of an ultrasonic diagnostic apparatus according to a first embodiment of the present invention. The ultrasonic diagnostic apparatus of this embodiment is an apparatus that images a heart and displays a color coding image that is colored according to the magnitude (speed) of motion of each part of the heart tissue.
[0015]
The ultrasonic diagnostic apparatus according to the present embodiment (1) obtains B-mode images of heart tissue and ultrasonically detects the velocity (Doppler velocity) of the traveling direction component of the ultrasonic beam at each point of the heart tissue. A process of emitting a beam and receiving an echo signal; (2) a process of acquiring a B-mode image from the echo signal; and (3) a process of detecting a Doppler shift of the echo signal to obtain a Doppler velocity at each point of the heart tissue. , (4) processing for obtaining the coordinates of the movement destination of each point of the heart tissue by block matching and obtaining the movement vector; and (5) color coding in which the velocity vector of each point of the heart tissue is obtained and a color corresponding to the velocity vector is assigned. A process of generating an image and displaying the image superimposed on the B-mode image is performed.
[0016]
In order to perform the above processing, the ultrasonic diagnostic apparatus according to the present embodiment includes an
[0017]
The
[0018]
The transducer of the
[0019]
The probe drive / echo
[0020]
The probe driving / echo
[0021]
Since the speed detection scan is a narrower range scan than the image acquisition scan, the probe drive / echo
[0022]
The probe drive / echo
[0023]
The B-
[0024]
On the other hand, the
[0025]
The
[0026]
The
[0027]
Prior to the block matching process, the
[0028]
A method for setting a search range for block matching will be described with reference to FIG. FIG. 2 is a diagram in the case where a certain point (point of interest) of the heart tissue within the velocity detection scan range is subjected to velocity detection scanning with an ultrasonic signal passing through the line segment ab. If the magnitude of the Doppler velocity at the point of interest is v at time t, the position of the point of interest at time t + Δt passes through a point that has moved ΔL = v · Δt in the direction of travel of the ultrasonic signal from the point of interest. It can be predicted to be “somewhere” on the line (line cd in FIG. 2) perpendicular to the signal traveling direction (line ab in FIG. 2) (predicted movement region). Accordingly, when the Doppler velocity at the point of interest in the Nth frame (time t) is v, the
[0029]
After setting the search range, the
[0030]
FIG. 5 is a diagram for explaining actual matching. The region f is a region having a size of a × b pixels with the point of interest in the Nth frame as the center. The region g is a region having a size of a × b pixels centering on the search target point in the search range of the (N + 1) th frame. As shown in FIG. 5, block matching is performed between the region f and the region g. Block matching is performed between the region f and the region corresponding to the region g extracted for all search target points in the search range, and the point where the cross-correlation value C calculated by the equation 1 is the highest is searched. To do.
[0031]
[Expression 1]
In this embodiment, a = b = 16. In the present embodiment, an example using the cross-correlation value of the luminance value is shown, but a method generally used for pattern matching or block matching, such as a method using the sum of absolute differences of luminance values, can be used.
[0033]
The
[0034]
The
[0035]
The
[0036]
When the movement of the frame is detected, the
[0037]
In addition, the
[0038]
The speed scan
[0039]
As described above, according to the first embodiment of the present invention, the range in which the block matching process is performed using the Doppler speed is limited, so that it is possible to perform a speed detection process faster than the conventional one.
[0040]
In the present embodiment, the shape of the search range set by the
[0041]
In addition, since sector scanning is used in this embodiment, the frame includes an area outside the range of ultrasonic scanning. Therefore, as shown in FIG. 4, a range in which the predicted movement region and the image acquisition scan range using ultrasonic waves overlap may be set as the search range. By setting in this way, it is not necessary to perform useless block matching processing on an area without image data, so that the amount of calculation can be reduced and high-speed processing is possible.
[0042]
Furthermore, in the present embodiment, since the tomographic scan is performed, the predicted movement region has a two-dimensional shape. However, when the two-dimensional array ultrasonic probe is used as the
[0043]
(Second Embodiment) FIG. 9 is a block diagram showing the configuration of an ultrasonic diagnostic apparatus according to a second embodiment of the present invention. The ultrasonic diagnostic apparatus of the present embodiment is an apparatus that images the heart and displays the motion trajectory of the point of interest set by the user of the apparatus in the heart tissue.
[0044]
The ultrasonic diagnostic apparatus according to the present embodiment (1) obtains B-mode images of heart tissue and ultrasonically detects the velocity (Doppler velocity) of the traveling direction component of the ultrasonic beam at each point of the heart tissue. A process of emitting an beam and receiving an echo signal; (2) a process of acquiring a B-mode image from the echo signal; and (3) detecting a Doppler shift of the echo signal to obtain a Doppler velocity of each point of the heart tissue. Processing, (4) processing for obtaining the movement vector of the point of interest designated by the user of the apparatus among the points of the heart tissue by block matching, and obtaining the movement vector, and (5) the movement vector of the point of interest sequentially. A process of accumulating and generating an image depicting the locus of the point of interest from the movement vector and displaying it together with the B-mode image is performed.
[0045]
In order to realize the above processing, the ultrasonic diagnostic apparatus of this embodiment includes an
[0046]
The probe drive / echo
[0047]
The
[0048]
The
[0049]
The
[0050]
The
[0051]
When the movement of the mark by the user of the apparatus is detected, the
[0052]
In addition, the
[0053]
The
[0054]
The point of
[0055]
Note that when the coordinates of a new point of interest are input from the control unit 108 (that is, when the user changes the point of interest), the point of
[0056]
A case where there are two or more attention points will be described. The probe drive / echo
[0057]
In this embodiment, the coordinate data of the point of interest is used only in the ultrasonic diagnostic apparatus. However, a terminal (not shown) that sequentially outputs the coordinate data of the point of interest to the outside is provided in the
[0058]
As described above, according to the second embodiment of the present invention, the range in which the block matching process is performed using the Doppler speed is limited, so that the coordinates of the moving destination of the point of interest can be obtained at a higher speed than before without reducing accuracy. be able to.
[0059]
In addition, since the point of interest set by the user can be automatically tracked and the locus of the point of interest can be drawn, it is possible to examine the state of the exercise in detail as compared with the prior art.
[0060]
(Third Embodiment) An ultrasonic diagnostic apparatus according to a third embodiment of the present invention will be described with reference to FIG. The ultrasonic diagnostic apparatus according to the present embodiment is an apparatus that captures an image of the heart and expresses, as a graph, the temporal change in the speed of the point of interest set by the user of the apparatus in the heart tissue.
[0061]
The ultrasonic diagnostic apparatus according to the present embodiment (1) obtains B-mode images of heart tissue and ultrasonically detects the velocity (Doppler velocity) of the traveling direction component of the ultrasonic beam at each point of the heart tissue. A process of emitting a beam and receiving an echo signal; (2) a process of acquiring a B-mode image from the echo signal; and (3) a process of detecting a Doppler shift of the echo signal to obtain a Doppler velocity at each point of the heart tissue. (4) a process of obtaining a movement vector by obtaining the coordinates of the movement destination of the point of interest set by the user of the apparatus among the points of the heart tissue by block matching; and (5) obtaining a velocity from the movement vector and obtaining this. A process of sequentially storing, generating a time change graph of the velocity vector, and displaying it together with the B-mode image is performed.
[0062]
In order to perform the above processing, the ultrasonic diagnostic apparatus of the present embodiment includes an
[0063]
The
[0064]
The
[0065]
The
[0066]
The
[0067]
When detecting the movement of the mark by the user of this apparatus, the
[0068]
In addition, the
[0069]
The
[0070]
The point of
[0071]
Note that when the coordinates of a new point of interest are input from the control unit 108 (that is, when the user changes the point of interest), the point of
[0072]
In this embodiment, the velocity vector data of the point of interest is used only in the ultrasonic diagnostic apparatus. However, a terminal (not shown) for sequentially outputting the velocity vector of the point of interest to the outside is provided in the
[0073]
As described above, according to the third embodiment of the present invention, the movement vector between the frames of the point of interest is obtained, and the velocity vector is calculated based on this. Can also be obtained at high speed. Furthermore, since the point of interest set by the user is automatically tracked and the speed detection scan range is set, the speed detection scan range can be narrower than before, and the speed change can be reduced by shortening the scan interval. It is also possible to use in detail.
[0074]
【The invention's effect】
As described above, according to the present invention, the original two-dimensional or three-dimensional motion of an object can be accurately tracked at high speed, and a two-dimensional or three-dimensional movement vector and velocity vector can be obtained. As a result, the motion of the object can be captured more accurately, and faster and more accurate diagnosis can be performed in the medical field.
[Brief description of the drawings]
FIG. 1 is a block diagram illustrating a configuration of a first embodiment of the present invention.
FIG. 2 is a diagram showing candidates for actual speed estimated from speed calculated from Doppler shift (first setting example of search range);
FIG. 3 shows a second setting example of a search range.
FIG. 4 shows a third setting example of a search range.
FIG. 5A is a view for explaining the handling of an Nth frame in block matching processing; (B) The figure explaining the handling of the N + 1 frame in a block matching process.
FIG. 6 shows a first setting example of a search range when obtaining a three-dimensional velocity during three-dimensional scanning.
FIG. 7 shows a second setting example of a search range when obtaining a three-dimensional velocity during three-dimensional scanning.
FIG. 8 is a flowchart for explaining calculation processing of a destination coordinate of a point of interest and an example of using the calculated destination coordinate.
FIG. 9 is a block diagram illustrating a configuration of a second embodiment of the present invention.
FIG. 10 is a block diagram illustrating a configuration of a third embodiment of the present invention.
FIG. 11 is a diagram for explaining a difference between a speed calculated from a Doppler shift and an actual speed.
[Explanation of symbols]
101 Ultrasonic probe
102 Probe drive / echo signal processor
103 B mode DSC section
104 frame memory
105 Speed detector
106 Search range calculation unit
107 Tracking unit
108 Control unit
109 Speed scan range setting section
110 Display section
111 Attention point setting section
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001393151A JP3734443B2 (en) | 2001-12-26 | 2001-12-26 | Ultrasonic diagnostic equipment |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001393151A JP3734443B2 (en) | 2001-12-26 | 2001-12-26 | Ultrasonic diagnostic equipment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003190167A JP2003190167A (en) | 2003-07-08 |
| JP3734443B2 true JP3734443B2 (en) | 2006-01-11 |
Family
ID=27600209
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001393151A Expired - Fee Related JP3734443B2 (en) | 2001-12-26 | 2001-12-26 | Ultrasonic diagnostic equipment |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3734443B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103126720A (en) * | 2013-02-22 | 2013-06-05 | 飞依诺科技(苏州)有限公司 | Multiple-propagation-velocity ultrasonic imaging method and multiple-propagation-velocity ultrasonic imaging device |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1941454A1 (en) * | 2005-10-20 | 2008-07-09 | Koninklijke Philips Electronics N.V. | Ultrasonic imaging system and method |
| JP2007125152A (en) * | 2005-11-02 | 2007-05-24 | Hitachi Medical Corp | Ultrasonic diagnostic apparatus |
| US9173638B2 (en) * | 2007-06-04 | 2015-11-03 | Biosense Webster, Inc. | Cardiac mechanical assessment using ultrasound |
| JP5409719B2 (en) | 2011-07-27 | 2014-02-05 | 日立アロカメディカル株式会社 | Ultrasonic image processing device |
-
2001
- 2001-12-26 JP JP2001393151A patent/JP3734443B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103126720A (en) * | 2013-02-22 | 2013-06-05 | 飞依诺科技(苏州)有限公司 | Multiple-propagation-velocity ultrasonic imaging method and multiple-propagation-velocity ultrasonic imaging device |
| CN103126720B (en) * | 2013-02-22 | 2015-09-23 | 飞依诺科技(苏州)有限公司 | The ultrasonic imaging method of many spread speeds and device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003190167A (en) | 2003-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2507535C2 (en) | Extended field of view ultrasonic imaging with two dimensional array probe | |
| CN102047140B (en) | Extended field of view ultrasonic imaging with guided EFOV scanning | |
| JP4745133B2 (en) | Ultrasonic diagnostic apparatus, medical image processing apparatus, and medical image processing program | |
| US7758507B2 (en) | Blood flow imaging | |
| US9186125B2 (en) | Ultrasonic diagnostic apparatus for generating three dimensional cardiac motion image by setting line segmented strain gauges | |
| US20050085729A1 (en) | Ultrasonic image processor and ultrasonic diagnostic instrument | |
| EP2529666B1 (en) | Ultrasonic diagnosis device and method used therefor to track measurement point | |
| CN107647880B (en) | Medical image processing apparatus and medical image processing method | |
| WO2007114375A1 (en) | Ultrasound diagnostic device and control method for ultrasound diagnostic device | |
| JP2014217745A (en) | Ultrasonic diagnostic apparatus and method of controlling the same | |
| US9592028B2 (en) | Ultrasonic diagnostic apparatus | |
| US11311277B2 (en) | Ultrasound diagnostic apparatus and control method of ultrasound diagnostic apparatus | |
| US20150164482A1 (en) | Ultrasound diagnostic apparatus, ultrasound image recording method, and non-transitory computer readable recording medium | |
| JP2007044499A (en) | Ultrasonic diagnostic apparatus and ultrasonic image processing program | |
| JP4764209B2 (en) | Ultrasonic signal analysis apparatus, ultrasonic signal analysis method, ultrasonic analysis program, ultrasonic diagnostic apparatus, and control method of ultrasonic diagnostic apparatus | |
| KR101656127B1 (en) | Measuring apparatus and program for controlling the same | |
| JP2007143606A (en) | Ultrasonograph | |
| JPH06285065A (en) | Ultrasonic doppler diagnostic system | |
| JP4598652B2 (en) | Ultrasonic diagnostic equipment | |
| JPH10262970A (en) | Ultrasonic color doppler tomographic device | |
| JP3734443B2 (en) | Ultrasonic diagnostic equipment | |
| US11324487B2 (en) | Ultrasound diagnostic apparatus and control method of ultrasound diagnostic apparatus | |
| JPH0556971A (en) | Ultrasonic diagnostic device | |
| CN100383554C (en) | Heart wall strain imaging | |
| JP2002330966A (en) | Ultrasonic diagnostic instrument |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20050414 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20050606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051014 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051018 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081028 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121028 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121028 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131028 Year of fee payment: 8 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313114 Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |