JP2021036748A - アキシャルギャップモーター - Google Patents
アキシャルギャップモーター Download PDFInfo
- Publication number
- JP2021036748A JP2021036748A JP2019157929A JP2019157929A JP2021036748A JP 2021036748 A JP2021036748 A JP 2021036748A JP 2019157929 A JP2019157929 A JP 2019157929A JP 2019157929 A JP2019157929 A JP 2019157929A JP 2021036748 A JP2021036748 A JP 2021036748A
- Authority
- JP
- Japan
- Prior art keywords
- core
- yoke
- recess
- mounting member
- gap motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000010030 laminating Methods 0.000 claims description 14
- 239000000696 magnetic material Substances 0.000 claims description 12
- 239000002184 metal Substances 0.000 claims description 3
- 229910052751 metal Inorganic materials 0.000 claims description 3
- 238000010586 diagram Methods 0.000 abstract description 3
- 229910000831 Steel Inorganic materials 0.000 description 44
- 239000010959 steel Substances 0.000 description 44
- 229910000976 Electrical steel Inorganic materials 0.000 description 18
- 239000000853 adhesive Substances 0.000 description 12
- 230000001070 adhesive effect Effects 0.000 description 12
- 239000000463 material Substances 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000003466 welding Methods 0.000 description 4
- 230000004907 flux Effects 0.000 description 3
- 230000001151 other effect Effects 0.000 description 3
- 238000010008 shearing Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- 229910001209 Low-carbon steel Inorganic materials 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000002788 crimping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910001105 martensitic stainless steel Inorganic materials 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 102200082816 rs34868397 Human genes 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 230000003746 surface roughness Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images



















Landscapes
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
【課題】アキシャルギャップモーターにおいて、ステーターを構成するヨークとコアとを、損失が少なく、かつ堅牢なものとする。【解決手段】アキシャルギャップモーターのステーターに設けられたコアは、ヨークに接する第1面に第1凹部を備え、ヨークは、コアの第1面に接する第2面に第2凹部を備える。コアの第1凹部とヨークの第2凹部とに取付部材が嵌合し、コアをヨークに取付ける。【選択図】図5
Description
本開示は、アキシャルギャップモーターに関する。
アキシャルギャップモーターは、回転磁束が形成されるステーターとローターとの間のギャップをモーターの回転軸方向に備える。従来、バックヨークとコアとは別々に製造してから、両者を接合してステーターを構成している。
特許文献1では、バックヨークにコア(ティース)が嵌まる穴を設け、ここにコアを挿入しており、コアとバックヨークとの接合を、電磁鋼板のコーティング剤による固着や、接着剤による固定、あるいは溶接等により実現している。
しかしながら、アキシャルギャップモーターでは、回転磁界によってローターを回転させる際、ローターを回転させるトルクの反力は、ステーター側のコアにおいて周方向の力として作用するため、モーターの高出力化を図るほど、コアとバックヨークの接合部に大きな力が働くことになる。このため、特許文献1の構成では、ステーターが損傷する虞がある。
本開示は、以下の形態又は適用例として実現することが可能である。本開示にかかるアキシャルギャップモーターは、ローターと、ステーターとを備える。このアキシャルギャップモーターの前記ステーターは、コアと、ヨークと、前記コアと前記ヨークとを接続する取付部材とを有し、前記コアは、前記ヨークに接する第1面に、第1凹部を備え、前記ヨークは、前記コアの前記第1面に接する第2面に、第2凹部を備え、前記取付部材は、前記コアの前記第1凹部と前記ヨークの前記第2凹部とに嵌合している。
A.第1実施形態:
図1は、第1実施形態のアキシャルギャップモーター20の概略構成を断面視で示す概略構成図である。このアキシャルギャップモーター20は、回転軸21の軸方向中心に、ローター40を備え、このローター40の軸方向に両側にステーター31,32を備える、いわゆるダブルステーター構造を備える。図示するように、回転軸21の軸方向上向きを符号A、この回転軸21に対する径方向外側向きを符号R、として各々示す。この符号A、Rで示す方向は、他の図でも同様に示した。また、これらの方向に加えて、ローター40やステーター31,32の周方向を、符号Cとして、併せて図示することがある。また、以下の説明では、軸方向Aに沿った方向を「上」、逆方向を「下」と呼ぶことがある。
図1は、第1実施形態のアキシャルギャップモーター20の概略構成を断面視で示す概略構成図である。このアキシャルギャップモーター20は、回転軸21の軸方向中心に、ローター40を備え、このローター40の軸方向に両側にステーター31,32を備える、いわゆるダブルステーター構造を備える。図示するように、回転軸21の軸方向上向きを符号A、この回転軸21に対する径方向外側向きを符号R、として各々示す。この符号A、Rで示す方向は、他の図でも同様に示した。また、これらの方向に加えて、ローター40やステーター31,32の周方向を、符号Cとして、併せて図示することがある。また、以下の説明では、軸方向Aに沿った方向を「上」、逆方向を「下」と呼ぶことがある。
回転軸21は、図1では、円柱体として示したが、中空の回転軸としてもよい。アキシャルギャップモーター20では、回転軸方向Aの厚みが薄くなり、径方向Rの寸法が大きくなる傾向にあるため、回転軸21の径を大きくし、中空軸として、内部にアキシャルギャップモーター20への配線を通すといった構成を取ることも望ましい。
この回転軸21の軸方向の略中心に固定されたローター40は、その径方向Rの終端近くに、複数個の永久磁石41,43を周方向に均等に、本実施形態では、12個配置している。永久磁石41,43の個数と配置は、アキシャルギャップモーター20の相数と極数とにより定められる。ローター40の中心部は、回転軸21が固定される固定部45が形成されており、回転軸21は、固定部45に圧入されて、固定される。もとより、キーとキー溝とにより両者を結合してもよい。
ローター40の固定部45には、軸受け23,24を介して、ステーター31,32が取り付けられる。この軸受け23,24により、回転軸21およびローター40は、ステーター31,32を側面ケース27で結合したモーターケースに対して、回転可能に保持される。ステーター31,32は、ローター40の永久磁石41,43に対向するように、ステーターコア(以下、単にコアという)51,52が設けられている。ステーター31の概略構成を、図2の斜視図に示した。本実施形態のアキシャルギャップモーター20は、三相4スロットの構成を備えることから、ステーター31当りのコア51の数は12個である。
ステーター31は、12個のコア51と、これらのコア51に共通に設けられたバックヨーク(以下単にヨークという)35と、各コア51の外周に巻き取られた巻線であるコイル61とからなる。ヨーク35は、コア51の径方向の幅と略同一の幅を有する円環形状の電磁鋼板を積層して構成されており、所定の厚みを有する。電磁鋼板の表面には、絶縁皮膜が形成されている。各電磁鋼板は、電磁鋼板の同じ場所に、板厚の半分程度裏側に突出する窪みが形成される。電磁鋼板を重ねた後、各電磁鋼板は、この窪み同士を嵌め合わせて加締める半かしめにより固定される。なお、積層前の接着剤の塗布や、積層後の溶接によって、電磁鋼板を固定してもよい。電磁鋼板同士の固定は、後述するコアの積層や、コアとヨークの接合においても同様である。また、他の実施形態においても同様である。
もうひとつのステーター32も、ステーター31と同様に、12個のコア52と、これらのコア52に共通のヨーク36と、各コア52の外周に巻き取られたコイル63とを備える。二つのステーター31,32は、ローター40を挟んで面対称の構造を備え、ローター40に設けられた12個の永久磁石41,43とコア51、コア52との対向面は、所定のギャップを隔てている。
図3は、コア51をヨーク35に固定した後、コイル61をコア51に嵌め込む様子を示した斜視図、図4は、コイル61を嵌め込んだコア51の上面図である。コア51は、図3に示したように、板状の磁性材料である電磁鋼板71を積層して形成される。電磁鋼板71の積層方向は、図4に示したように、軸方向Aとは異なる方向の一つであって軸方向Aに直交する径方向Rに沿った方向である。電磁鋼板71の表面には絶縁皮膜および窪みが形成されており、半かしめにより固定されることは、ヨーク35と同様である。なお、コア51やヨーク35は、電磁鋼板に限らず、磁性材料の板材、例えば種々の金属板により形成可能である。ヨークは、圧粉など板材以外の形態で形成しても差し支えない。
コア51は、その外周を、励磁用のコイル61が取り巻いている。コア51の外周を取り巻くコイル61は、コア51に個々に巻き取ってもよいが、予めボビン状に巻き取っておき、図3に例示したように、コア51の外周に嵌め込むものとしてもよい。
このコア51とヨーク35とは、図3に示したように、コア51の下面、つまりヨーク35に接する第1面と、ヨーク35の上面、つまりコア51に接する第2面とには、それぞれ第1凹部,第2凹部が形成され、ここに取付部材81が嵌め込まれている。図4では、取付部材81は、破線で示されている。図5は、図4におけるRR矢視図である。なお、図5では、コイル61の一部を破断して、取付部材81を描いてある。取付部材81は、略棒状、すなわち、長方形状の部材であり、その長手方向の長さが、コア51やヨーク35の径方向に沿った長さと同じであり、その幅は、コア51を構成する電磁鋼板71の1枚分の厚さより大きい。図4、図5に示したように、取付部材81は、コア51とヨーク35とを、径方向Rに沿って、つまりコア51の積層方向に貫くように取り付けられる。
コア51には、この取付部材81の形状に合わせた第1凹部55が、コア51の下面、即ち第1面に形成され、ヨーク35には、同様に、取付部材81の形状に合わせた第2凹部91が形成されている。コア51の第1凹部55は、コア51を形成する電磁鋼板71に、第1凹部55に対応した切欠きを設けておき、これを積層することにより形成される。他方、ヨーク35は、図5に示したように、形状の異なる電磁鋼板38A,38Bを組み合わせて、第2凹部91を形成している。この例ではヨーク35は、電磁鋼板を合計6枚積層して形成されており、コア51側の4枚の電磁鋼板38Aの下に配置される2枚の電磁鋼板38Bは、円環形状をしている。その上の4枚の電磁鋼板38Aは、取付部材81に対応する部分が存在せず、つまり12個のコア51のそれぞれ隣接する取付部材81間に配置されるよう、円環形状の電磁鋼板38Bを12個に分割し、かつ取付部材81に対応する部分を取り除いた形状をしている。
取付部材81は、本実施形態では、磁性を有する金属材料であるS45Cを用いて形成される。他の磁性材料、例えば純鉄、低炭素鋼、Fe−Ai合金、磁性体であるマルテンサイト系あるいはフェライト形のステンレス鋼(例えばSUS440A)など用いて形成してもよい。取付部材81の材料は、電磁鋼板71と同じであってもよいし、異なってもよい。取付部材81の高さは、コア51が固定できれば、どのような高さでもよいが、コアの高さの1/2程度以下としてもよい。電磁鋼板は磁束の通り易さ、渦電流の生じにくさ、といった点で優れた磁性材料であるので、取付部材の高さが電磁鋼板71の高さ方向の1/2程度以下としておくことは、コアの特性を確保する上で有効である。取付部材の材料や形状(高さおよび幅)は、アキシャルギャップモーターとして要求される性能など応じて、適宜選択すればよい。こうした取付部材の材料や形状の選定は、以下の他の実施形態でも同様である。
取付部材81は、コア51の第1凹部55、ヨーク35の第2凹部91に、それぞれ圧入されている。もとより、取付部材81は、両第1凹部55,91に取り付けた上で、接着剤により接着してもよいし、レーザ溶接などにより溶着してもよい。機械的接着を行なう接着剤を用いる場合は、取付部材81の表面粗さを粗くして接着力を高めてもよい。化学的または物理的接着を行なう接着剤を用いる場合は、取付部材81の表面を平滑にして、接着力を高めてもよい。更に、取付部材81は、ビスやリベットなどで補強してもよい。こうした溶接や、接着剤、あるいはリベットなどによる補強は、他の実施形態でも同様に利用可能である。
以上説明した第1実施形態のアキシャルギャップモーター20は、同一形状の電磁鋼板71を積層して形成されたコア51と、2種類の形状の電磁鋼板38A,38Bを積層して形成されたヨーク35とを接続するのに、取付部材81を用いている。従って、ローター40を回転させる磁束によるトルクの反力がコア51に対して、周方向に加わっても、コア51がヨーク35から外れたり、せん断力により損傷を受けるという可能性を低減できる。また、本実施形態では、コア51を構成する電磁鋼板71は同一形状のものを用いることができ、コア51の製造を容易なものにできる。本実施形態では、コア51のヨーク35への取付は、単一の取付部材81をコア51とヨーク35の第1凹部55,91に嵌め込むだけでよく、アキシャルギャップモーター20の製造を容易としている。
また、第1実施形態のアキシャルギャップモーター20は、取付部材81がコア51およびヨーク35の径方向Rに沿った幅と同じ長手方向長さを有するので、コア51に加わるせん断力を、コア51およびヨーク35の最大長さを受け止めることができる。また、コア51の積層方向に取付部材81が配置されているので、全てのコア51にせん断力が加わることになり、積層された電磁鋼板71を剥がすような力が加わることがない。
B.第2実施形態:
第2実施形態のアキシャルギャップモーター20のステーター31Aの構成を図6に示す。また、図7は、図6のVII−VII矢視図である。アキシャルギャップモーター20の他の構成は、図1に示した第1実施形態と同様である。第2実施形態では、取付部材82の長手方向長さがコア51Aやヨーク35Aの径方向Rに沿った長さより短い。このため、コア51Aに設けられた第1凹部55Aとヨーク35Aに設けられた第2凹部92とは、それぞれコア51A、ヨーク35Aの径方向Rに沿った長さより短い。
第2実施形態のアキシャルギャップモーター20のステーター31Aの構成を図6に示す。また、図7は、図6のVII−VII矢視図である。アキシャルギャップモーター20の他の構成は、図1に示した第1実施形態と同様である。第2実施形態では、取付部材82の長手方向長さがコア51Aやヨーク35Aの径方向Rに沿った長さより短い。このため、コア51Aに設けられた第1凹部55Aとヨーク35Aに設けられた第2凹部92とは、それぞれコア51A、ヨーク35Aの径方向Rに沿った長さより短い。
コア51Aは、第1凹部55Aを形成するために2種類の形状の電磁鋼板71,72を組み合わせて積層している。図6に示したように、第1凹部55Aに対応する形状を備えた電磁鋼板71を複数枚積層した両側各々に、第1凹部55Aに対応する凹みのない電磁鋼板72を、数枚ずつ積層している。また、ヨーク35Aは、円環形状の電磁鋼板37Aを複数枚(この例では6枚)、軸方向Aに沿って積層している。各電磁鋼板37Aは、取付部材82が嵌る第2凹部92に対応する開口部を有する。
こうして電磁鋼板37Aを積層して形成されたヨーク35Aの第2凹部92に、取付部材82を圧入・固定し、更にコア51Aを、その第1凹部55Aに取付部材82に嵌め込まれるように、上方から圧入する。こうしてコア51Aをヨーク35Aに取り付けた後、必要に応じて接着や溶着し、更にコイル61を取り付けてステーター31Aを完成する。ステーター31Aは、図1に示したアキシャルギャップモーター20に組み込まれる。これは、以後説明する他の実施形態でも同様である。
第2実施形態のアキシャルギャップモーター20は、第1実施形態と同様の作用効果を奏する上、更に、第2実施形態では、形状の異なる電磁鋼板を組み合わせてコア51Aを形成している。このように、形状の異なる電磁鋼板を組み合わせると、凹部の形状を自由に設計することができる。複数種類の電磁鋼板は、平面形状が異なるものに限らず、厚みの異なるものであってもよい。また、第2実施形態では、ヨーク35Aを構成する各電磁鋼板37Aは同一形状にでき、しかも一続きに繋がった円環形状にできるので、ヨーク35Aを容易に製造できる。なお、第2実施形態では、ヨーク35Aの第2凹部92は、ヨーク35Aの厚さ方向に貫通する形状としたが、第1実施形態同様に、有底の窪みとして形成してもよい。
C.第3実施形態:
第3実施形態のアキシャルギャップモーター20に用いられるステーター31Bを、図8示した。また、図9は、図8のIX−IX矢視図である。図示するように、このステーター31Bでは、コア51Bを取り付けるヨーク35Bの第2凹部93は、開口部を有する同一形状の電磁鋼板37Bを積層することにより、ヨーク35Bの周方向Cの接線方向に沿って形成されている。また、コア51Bにおける電磁鋼板71の積層方向も、同様に、軸方向Aとは異なるヨーク35Bの周方向Cの接線方向に沿っている。このコア51Bの底面に形成された第1凹部55Bも、ヨーク35Bの周方向Cの接線方向に沿って形成されている。コア51Bとヨーク35Bとは、取付部材83をそれぞれの第1凹部55B,93に嵌め込むことにより接続される。
第3実施形態のアキシャルギャップモーター20に用いられるステーター31Bを、図8示した。また、図9は、図8のIX−IX矢視図である。図示するように、このステーター31Bでは、コア51Bを取り付けるヨーク35Bの第2凹部93は、開口部を有する同一形状の電磁鋼板37Bを積層することにより、ヨーク35Bの周方向Cの接線方向に沿って形成されている。また、コア51Bにおける電磁鋼板71の積層方向も、同様に、軸方向Aとは異なるヨーク35Bの周方向Cの接線方向に沿っている。このコア51Bの底面に形成された第1凹部55Bも、ヨーク35Bの周方向Cの接線方向に沿って形成されている。コア51Bとヨーク35Bとは、取付部材83をそれぞれの第1凹部55B,93に嵌め込むことにより接続される。
以上説明した第3実施形態によれば、ヨーク35Bにおいて第2凹部93を形成する開口部は、ヨーク35Bの周方向Cに沿って形成されているので、ヨーク35Bの径方向Rに沿った開口部の幅は、ヨーク35Bの幅に対して十分に狭くなっている。このため、ヨーク35Bの径方向Rに沿った強度を十分なものにできる。第3実施形態のステーター31Bを備えたアキシャルギャップモーターとしての作用効果は第1,第2実施形態と同様である。なお、第2凹部93を形成する開口部は、周方向Cの接線方向に沿って形成される以外にも、ヨーク35Bの円周に沿って形成されてもよい。
D.第4実施形態:
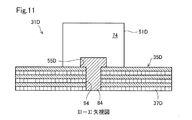
第4実施形態のアキシャルギャップモーター20に用いるローター31Dの構成を図10、図11に示す。図11は、図10のXI−XI矢視図である。このローター31Dは、複数の電磁鋼板74を積層したコア51Dと、複数の電磁鋼板37Dを積層したヨーク35Dと、両者を接続する取付部材84とを備える。コア51Dを構成する全ての電磁鋼板74は、図11に示したように、第1凹部55Dを形成する切欠を備える。従って、電磁鋼板74を積層すると、第1凹部55Dは、コア51Dの積層方向の端から端まで形成される。なお、コア51Dを形成する電磁鋼板74は、径方向Rに沿った方向に積層されている。
第4実施形態のアキシャルギャップモーター20に用いるローター31Dの構成を図10、図11に示す。図11は、図10のXI−XI矢視図である。このローター31Dは、複数の電磁鋼板74を積層したコア51Dと、複数の電磁鋼板37Dを積層したヨーク35Dと、両者を接続する取付部材84とを備える。コア51Dを構成する全ての電磁鋼板74は、図11に示したように、第1凹部55Dを形成する切欠を備える。従って、電磁鋼板74を積層すると、第1凹部55Dは、コア51Dの積層方向の端から端まで形成される。なお、コア51Dを形成する電磁鋼板74は、径方向Rに沿った方向に積層されている。
他方、ヨーク35Dを構成する電磁鋼板37Dは、径方向Rに沿った方向を長手方向とする第2凹部94を形成する開口部を備える。電磁鋼板37Dを積層したとき、この開口部が形成する第2凹部94の幅(周方向Cに沿った方向の長さ)は、ヨーク51Dの第1凹部55Dの幅より狭い。コア51D側の第1凹部55Dと、ヨーク35D側の第2凹部94とに嵌まって両者を接続する取付部材84は、図12に示すように、上部84Cと下部84Yとで異なる形状をしている。
コア51Dとヨーク35Dとを、取付部材84により接続すると、コア51Dにはその積層方向の全長に亘って取付部材84の上部84Cが固定され、ヨーク35Dには取付部材84の下部84Yが固定される。この実施形態のローター31Dは、コア51Dを形成する電磁鋼板74を同一形状にできるだけでなく、ヨーク35Dを形成する電磁鋼板37Dも同一形状にすることができる。しかも、全ての電磁鋼板74が取付部材84に接して固定されるので、周方向Cに沿った力を受けてもコア51Dが外れにくい。
E.第5実施形態:
コアとヨークとを接続する取付部材は、様々な形状が可能である。上述した第4実施形態の基本的な構成、つまりコアについては電磁鋼板の積層方向全長に亘って凹部を形成し、ヨークについては、ヨークの幅より狭い長さの凹部を設けた構成において、取付部材の形状を異ならせた他の実施形態を以下説明する。図13は第5実施形態のアキシャルギャップモーター20に用いるローター31Eの構成を断面視として示す説明図である。この例でも、コア51Eを形成する電磁鋼板75は、同一形状とすることができる。また、ヨーク35Eを形成する電磁鋼板37Eも同一形状とすることができる。
コアとヨークとを接続する取付部材は、様々な形状が可能である。上述した第4実施形態の基本的な構成、つまりコアについては電磁鋼板の積層方向全長に亘って凹部を形成し、ヨークについては、ヨークの幅より狭い長さの凹部を設けた構成において、取付部材の形状を異ならせた他の実施形態を以下説明する。図13は第5実施形態のアキシャルギャップモーター20に用いるローター31Eの構成を断面視として示す説明図である。この例でも、コア51Eを形成する電磁鋼板75は、同一形状とすることができる。また、ヨーク35Eを形成する電磁鋼板37Eも同一形状とすることができる。
第5実施形態では、取付部材85の上部は断面台形形状をしている。このため、取付部材85をヨーク35Eに取付けた上で、上方からコア51Eを装着する際、位置決めが容易であり、組み付けしやすい。その他の作用効果は上述した他の実施形態と同様である。
F.第6実施形態:
図14は第6実施形態のアキシャルギャップモーター20に用いるローター31Fの構成を断面視として示す説明図である。この例でも、コア51Fを形成する電磁鋼板76は、同一形状とすることができる。また、ヨーク35Fを形成する電磁鋼板37Fも同一形状とすることができる。
図14は第6実施形態のアキシャルギャップモーター20に用いるローター31Fの構成を断面視として示す説明図である。この例でも、コア51Fを形成する電磁鋼板76は、同一形状とすることができる。また、ヨーク35Fを形成する電磁鋼板37Fも同一形状とすることができる。
第6実施形態では、取付部材86は断面視において、中央がくびれた形状をしている。このくびれた部分から上部が、コア51Fに取付けられる。従って、組み付けの際には、電磁鋼板76を積層して形成したコア51Fに対して、その第1凹部55Fには、取付部材86を径方向Rに沿ってスライドするように挿入する。その上で、コア51Fを上方からヨーク35Fに取付け、取付部材86の下部をヨーク35Fの第2凹部96に取付ける。この実施形態では、取付部材86がコア51Fの第1凹部55Fに挿入されると、くびれ部が存在する効果により、51Fに周方向Cに沿った力が加わっても、コア51Fが取付部材86から外れることがない。その他の作用効果は上述した他の実施形態と同様である。
取付部材86のくびれ部の形状は、図14に示した形状に限らず、例えば図15に示したように、上部を逆台形形状とした取付部材87を用いて、コア51Gとヨーク35Gとを接続するようにしてもよい。この場合も、コア51Gを形成する電磁鋼板77は同一形状のものを用いることができる。また、ヨーク35Gを形成する電磁鋼板37Gは同一形状のものを用いることができる。図15に示したステーター31Gでも、一旦、取付部材87によりコア51Gとヨーク35Gとを固定すれば、周方向Cに沿った力に対して、コア51Gは外れにくい。
G.第7実施形態:
図16,図17に第7実施形態のアキシャルギャップモーター20に用いられるステーター31Hの概略構成を示す。図17は、図16の、XVII−XVII矢視図である。この実施形態では、取付部材88は、断面形状が、台形形状の下部と逆台形形状の上部とからなる。従って、取付部材88は、中央にくびれ部を備える。コア51Hは、同一形状の電磁鋼板78を積層しており、その下面には、第1凹部55Hが、径方向Rに沿って、コア51Hの全長に亘って形成されている。コア51Hの第1凹部55Hは、取付部材88の上部に対応した形状をしている。この取付部材88は、コア51Hの第1凹部55Hに径方向Rに沿ってスライドするように取付けられる。
図16,図17に第7実施形態のアキシャルギャップモーター20に用いられるステーター31Hの概略構成を示す。図17は、図16の、XVII−XVII矢視図である。この実施形態では、取付部材88は、断面形状が、台形形状の下部と逆台形形状の上部とからなる。従って、取付部材88は、中央にくびれ部を備える。コア51Hは、同一形状の電磁鋼板78を積層しており、その下面には、第1凹部55Hが、径方向Rに沿って、コア51Hの全長に亘って形成されている。コア51Hの第1凹部55Hは、取付部材88の上部に対応した形状をしている。この取付部材88は、コア51Hの第1凹部55Hに径方向Rに沿ってスライドするように取付けられる。
他方、ヨーク35Hは、磁性体の粉末を高い圧力で固めた、いわゆる圧粉により形成されている。ヨーク35Hには、取付部材88の下部形状に対応した第2凹部98が形成されている。この第2凹部98は、図16に示したように、ヨーク35Hの径方向Rに沿ってヨーク35Hの全幅に亘って形成されている。従って、取付部材88の下部もヨーク35Hの第2凹部98に、径方向Rに沿ってスライドするように取付けられる。
こうすれば、取付部材88を用いてコア51Hとヨーク35Hとを固定すれば、周方向Cに沿った力に対して、両者は外れにくい。他の作用効果は、上述した他の実施形態と同様である。なお、ヨーク35Hの形状は、第1実施形態(図5)で説明したように、電磁鋼板によって形成することも可能である。この場合、円環形状のヨークを積層した上に、分割されたヨークをコア間に積層すればよい。このとき、徐々に開口の幅が小さくなるように、分割されたヨークの周方向Cに沿った長さを設定すればよい。
H.その他の構成例:
以上、本開示に沿って、いくつかの実施形態について説明したが、各実施形態において、取付部材は、その角度を面取りしても差し支えない。図18に示した例では、第1実施形態で用いた取付部材81の角部を削り、角面81Cとしている。もとより、丸面に面取りしてもよい。面取りしておくことで、取付部材を取付ける際の位置決めが容易となる。
以上、本開示に沿って、いくつかの実施形態について説明したが、各実施形態において、取付部材は、その角度を面取りしても差し支えない。図18に示した例では、第1実施形態で用いた取付部材81の角部を削り、角面81Cとしている。もとより、丸面に面取りしてもよい。面取りしておくことで、取付部材を取付ける際の位置決めが容易となる。
また、取付部材を凹部に嵌め込んで取付ける際に接着剤を用いる場合には、取付部材の外周に、図19に例示した様に、溝81Gを設けてもよい。こうすれば、余剰の接着剤が溝81Gに流れ込むため、余剰の接着剤により、取付部材の挿入が不十分なものとなりにくい。なお、溝81Gの場所や大きさは、用いる接着剤の種類や量などにより、適宜設定すればよい。
上述した各実施形態では、取付部材は、いずれも略棒状の形状としたが、図20に例示するように、少なくともコア側あるいはヨーク側の一方については、脚部を備えた形状としてもよい。図20示した例では、取付部材89の上部89Cは、第2実施形態と同様、断面矩形形状であり、その下部に二つの脚部89Yが設けられている。この場合、ヨークには脚部89Yに応じた凹部を設ければよい。なお、図20の例では、脚部89Yは角柱形状としたが、円柱形状など他の形状としてもよい。円柱形状とすれば、ヨーク側の凹部を、ドリルなどの後加工で形成することも可能である。脚部は2つに限らず、1つでも3つ以上とも差し支えない。また、各脚部の形状を異ならせても良い。
上記実施形態では、コアの平面形状は、矩形としたが、複数のコアが円環形状のヨーク上に配置され、各コアをコイルが取付けられることに鑑み、径方向Rに沿った外側ほどコアの幅(周方向Cに沿った長さ)が大きくなる形状としてもよい。
上記実施形態では、アキシャルギャップモーターは、永久磁石を搭載したローターの両側にステーターを備えた、いわゆるダブルステータータイプとしたが、シングルステーター・ダブルロータータイプであってもよいし、ステーターとローターが一つずつのタイプであってもよい。またローターが回転軸と共に回転するインナーロータータイプの他、ローターがケース側に固定され、回転しない軸の周りに回転する、いわゆるアウターロータータイプであってもよい。
本開示は、上述の実施形態に限られるものではなく、その趣旨を逸脱しない範囲において種々の構成で実現することができる。例えば、発明の概要の欄に記載した各形態中の技術的特徴に対応する実施形態中の技術的特徴は、上述の課題の一部又は全部を解決するために、あるいは、上述の効果の一部又は全部を達成するために、適宜、差し替えや、組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。
20…アキシャルギャップモーター、21…回転軸、27…側面ケース、31,31A〜31H,32…ステーター、35…ステーター、35,35A〜35H,36…ヨーク、37A〜37G,38A,38B…電磁鋼板、40…ローター、41…永久磁石、45…固定部、51,51A〜51H,52…コア、55,55A〜55H…第1凹部、61,63…コイル、71〜78…電磁鋼板、81〜89…取付部材、81C…角面、81G…溝、84C,89C…上部、84Y…下部、89Y…脚部、91〜98…第2凹部
Claims (9)
- ローターと、ステーターとを備え、
前記ステーターは、コアと、ヨークと、前記コアと前記ヨークとを接続する取付部材とを有し、
前記コアは、前記ヨークに接する第1面に、第1凹部を備え、
前記ヨークは、前記コアの前記第1面に接する第2面に、第2凹部を備え、
前記取付部材は、前記コアの前記第1凹部と前記ヨークの前記第2凹部とに嵌合している
アキシャルギャップモーター。 - 前記コアは、板状の磁性材料が積層され、
前記板状の磁性材料が積層される方向は、前記ローターの回転の軸方向とは異なる、請求項1記載のアキシャルギャップモーター。 - 前記取付部材の厚さは、前記板状の磁性材料の厚さより厚い、請求項2に記載のアキシャルギャップモーター。
- 前記板状の磁性材料は、同一形状である、請求項2または請求項3に記載のアキシャルギャップモーター。
- 前記板状の磁性材料のうちの少なくとも一部は、他の板状の磁性材料とは形状が異なる、請求項2または請求項3に記載のアキシャルギャップモーター。
- 前記取付部材は、前記コアとは異なる金属である、請求項1から請求項5のいずれか一項に記載のアキシャルギャップモーター。
- 前記取付部材は、前記コアと同じ金属である、請求項1から請求項5のいずれか一項に記載のアキシャルギャップモーター。
- 前記第1凹部および前記第2凹部は、前記ローターの回転の軸方向に直交する径方向に沿って、または前記ローターの周方向に沿って設けられる、請求項1から請求項7記載のいずれか一項に記載のアキシャルギャップモーター。
- 前記ヨークは、同一形状の板状の磁性材料を、前記ローターの回転の軸と平行な方向に積層してなり、
前記第2凹部は、前記ヨークに設けられる開口部である、請求項1から請求項8のいずれか一項に記載のアキシャルギャップモーター。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019157929A JP2021036748A (ja) | 2019-08-30 | 2019-08-30 | アキシャルギャップモーター |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019157929A JP2021036748A (ja) | 2019-08-30 | 2019-08-30 | アキシャルギャップモーター |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2021036748A true JP2021036748A (ja) | 2021-03-04 |
Family
ID=74716412
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019157929A Pending JP2021036748A (ja) | 2019-08-30 | 2019-08-30 | アキシャルギャップモーター |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2021036748A (ja) |
-
2019
- 2019-08-30 JP JP2019157929A patent/JP2021036748A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9219389B2 (en) | Permanent magnet rotating electrical machine | |
| EP1865587B1 (en) | Magnetic powder metal composite core for electrical machines | |
| JP6885417B2 (ja) | ステータ及びこのステータを備えるモータ | |
| JP7395870B2 (ja) | アキシャルギャップモーター | |
| JP2007074776A (ja) | 回転電機 | |
| JP2009011086A (ja) | アキシャルギャップ型回転電機用の電機子 | |
| JP2009118629A (ja) | 交流モータ | |
| JP7266180B2 (ja) | ロータ及びそれを備えたモータ | |
| CN114465382A (zh) | 旋转型电机及转子的制造方法 | |
| WO2017195498A1 (ja) | 回転子および回転電機 | |
| JP2019088033A (ja) | 電機子 | |
| JP6505345B1 (ja) | 回転子部材、回転子及び回転電機 | |
| JP4062723B2 (ja) | 回転形モータおよびその製造方法 | |
| CN112542905B (zh) | 轴向间隙电机 | |
| US20040016105A1 (en) | Method of making a stator for a motor | |
| JP4644922B2 (ja) | 同期電動機のロータ構造 | |
| JP2008131742A (ja) | モータ | |
| JP2021036748A (ja) | アキシャルギャップモーター | |
| JP2018085886A (ja) | 二重ロータ構造のモータ | |
| US20020135258A1 (en) | Laminated rotor for eddy-current brake and device including such a rotor | |
| WO2024000243A1 (zh) | 分段式定子芯、电机和用于制造电机的定子组件的方法 | |
| JP2004304995A (ja) | 励磁機、界磁機、およびそれを用いた電動機 | |
| JP2019054684A (ja) | モータ | |
| JP4675647B2 (ja) | ステータ、回転機用コア及び回転機 | |
| JP2018129946A (ja) | ステータコア、アキシャルギャップ型モータ、ステータコアの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200817 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210914 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211101 |