JP2017205867A - 可動構造を有する自動化装置、特にロボット - Google Patents
可動構造を有する自動化装置、特にロボット Download PDFInfo
- Publication number
- JP2017205867A JP2017205867A JP2017083805A JP2017083805A JP2017205867A JP 2017205867 A JP2017205867 A JP 2017205867A JP 2017083805 A JP2017083805 A JP 2017083805A JP 2017083805 A JP2017083805 A JP 2017083805A JP 2017205867 A JP2017205867 A JP 2017205867A
- Authority
- JP
- Japan
- Prior art keywords
- modules
- covering
- module
- sensor
- layer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/084—Tactile sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/086—Proximity sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0091—Shock absorbers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/028—Piezoresistive or piezoelectric sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
- B25J19/063—Safety devices working only upon contact with an outside object
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
- B25J19/063—Safety devices working only upon contact with an outside object
- B25J19/065—Mechanical fuse
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/08—Programme-controlled manipulators characterised by modular constructions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/14—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine the means being photocells or other devices sensitive without mechanical contact
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16P—SAFETY DEVICES IN GENERAL; SAFETY DEVICES FOR PRESSES
- F16P3/00—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body
- F16P3/12—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine
- F16P3/16—Safety devices acting in conjunction with the control or operation of a machine; Control arrangements requiring the simultaneous use of two or more parts of the body with means, e.g. feelers, which in case of the presence of a body part of a person in or near the danger zone influence the control or operation of the machine with feeling members moved by the machine
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
- G01B7/023—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness for measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/18—Measuring force or stress, in general using properties of piezo-resistive materials, i.e. materials of which the ohmic resistance varies according to changes in magnitude or direction of force applied to the material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V3/00—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation
- G01V3/08—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation operating with magnetic or electric fields produced or modified by objects or geological structures or by detecting devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/16—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring the deformation in a solid, e.g. by resistance strain gauge
- G01B7/18—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring the deformation in a solid, e.g. by resistance strain gauge using change in resistance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/16—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring the deformation in a solid, e.g. by resistance strain gauge
- G01B7/22—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring the deformation in a solid, e.g. by resistance strain gauge using change in capacitance
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/945—Proximity switches
- H03K17/955—Proximity switches using a capacitive detector
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
Abstract
Description
複数の生産工程における自動化への寄与を効果的に活用し、これにより複数の生産工程の効率を向上するため、ヒューマンオペレータと自動化装置、特に、ロボットとの間の対話を自然で安全に実行することが必要である。このように、ヒューマンオペレータが、過剰に複雑な自動化を必要とするであろうそれらの工程を任せられ得るが、一方で、例えば、大きな労力、実行の迅速性、高精度、及び品質などに関係する動作が自動化装置に任せられ得る。
‐ビデオカメラやレーザスキャナのような、マニピュレータを取り囲んでいる環境の幾何学の光学的再構成を目的とした複数のセンサと、
‐力センサ又は接触センサのような、マニピュレータとヒューマンオペレータとの間の接触又は衝突を認識することを目的とした複数の電気センサと、
‐近接センサのような、マニピュレータとヒューマンオペレータとの間の過度の接近を認識することを目的とした複数の電気センサ。
[本発明の概要及び目的]
モジュールに所望の所定形状を与えるために必要な剛性又は半剛性材料の少なくとも1つの層と、
生じ得る衝突を吸収するように設計された、降伏材料の少なくとも1つの層と、好ましくは、
少なくとも1つの外側被覆層を含む。
Claims (15)
- 自動化装置、特に、ロボットであって、
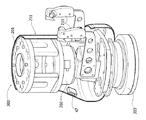
可動構造と、
前記可動構造の変位を引き起こすアクチュエータ手段と、
制御ユニットを含み、前記アクチュエータ手段を制御可能である制御システムと、
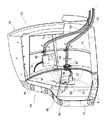
前記可動構造の少なくとも一部をカバーし、接触センサ手段及び近接センサ手段の少なくとも一方を含むセンサ手段を統合するセンサ付き被覆材とを備え、
前記センサ付き被覆材は、複数の被覆モジュールを有し、各々は、弾性降伏材料の少なくとも1つの層が関連づけられる、所定形状のそれぞれの耐力構造を含み、
前記複数の被覆モジュールは、それぞれの前記センサ手段を含む、1又は複数のセンサ付き被覆モジュールを含み、
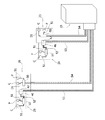
前記複数の被覆モジュールのうちの少なくともいくつかの耐力構造は、互いに隣接している少なくとも2つの異なる被覆モジュールを分離可能な方法で電気的に相互接続することを可能にするため、これに対して電気的コネクタ手段を関連づける、
自動化装置。 - 前記複数の被覆モジュールのうちの少なくともいくつかの前記耐力構造は、互いに隣接している少なくとも2つの異なる被覆モジュールを分離可能な方法で機械的に相互接続することを可能にするため、これに対して機械的コネクタ手段を関連づける、請求項1に記載の自動化装置。
- 電気的コネクタ手段、又はそれぞれ機械的コネクタ手段は、迅速な連結コネクタ手段である、請求項1又は2に記載の自動化装置。
- センサ付き被覆モジュールの前記センサ手段は、特に、対応する制御基板に電気的に接続される、それぞれの接触センサ手段及びそれぞれの近接センサ手段を備える、請求項1から3の何れか一項に記載の自動化装置。
- 前記センサ付き被覆材は、複数のセンサ付き被覆モジュールを有し、複数のセンサ付き被覆モジュールは、前記制御ユニットとの信号通信において接続され、
前記自動化装置と異物との間の接触、
前記自動化装置に関して実質的に予め定められた距離内の異物の存在、
の少なくとも一方を表す複数の信号又はデータを供給可能であり、
前記制御ユニットは、前記複数の信号又はデータを供給する前記複数のセンサ付き被覆モジュールを特定可能である、請求項1から4の何れか一項に記載の自動化装置。 - 第1被覆モジュールの前記耐力構造は、隣接する第2被覆モジュールの対応する表面又は壁に面する少なくとも1つの表面又は壁を有し、それぞれの電気的コネクタ手段及び/又はそれぞれの機械的コネクタ手段は、前記第1被覆モジュールの前記表面又は壁と、前記第2被覆モジュールの前記表面又は壁とに関連づけられる、請求項1又は2に記載の自動化装置。
- 1又は複数の被覆モジュールは、対応する前記耐力構造に関連づけられる少なくとも1つの制御基板を有し、対応する前記耐力構造は、前記制御ユニットとの信号通信において接続され、対応するセンサ付き被覆モジュールの前記センサ手段が、対応する前記耐力構造に電気的に接続される、請求項1から6の何れか一項に記載の自動化装置。
- 前記制御基板は、前記対応する被覆モジュールの前記耐力構造の内側に関連づけられる、請求項7に記載の自動化装置。
- 前記耐力構造は、所定の安全閾値より高い運動エネルギーで生じる対応する前記被覆モジュールに対する衝突に引き続き、崩壊又は破壊のために予め設定された構造であり、前記所定の安全閾値は、好ましくは60Nmと200Nmとの間である、請求項1から8の何れか一項に記載の自動化装置。
- 弾性降伏材料で形成されるクッション層が、前記耐力構造の外側に関連づけられ、前記クッション層は、前記所定の安全閾値より低い運動エネルギーで前記被覆モジュールそれ自体に対する複数の衝突の場合、運動エネルギーを吸収するために予め設定され、前記クッション層は、好ましくは、高分子発泡体、非常に好ましくは、発泡ポリウレタンで形成される、請求項9に記載の自動化装置。
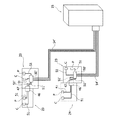
- 複数のアクティブ層及び複数のパッシブ層は、センサ付き被覆モジュールの前記耐力構造に関連づけられる、請求項1から10の何れか一項に記載の自動化装置。
- 前記複数のアクティブ層は、
下方の導電層と上方の導電層との間に設置されるピエゾ抵抗層であって、前記下方の導電層と前記上方の導電層は、ピエゾ抵抗接触センサに属し、好ましくは、前記ピエゾ抵抗層は、ピエゾ抵抗布を備え、前記上方及び下方の導電層は、導電性の生地を備える、ピエゾ抵抗層、
1つの第1の導電層及び1つの第2の導電層であって、電気絶縁材料の中間層がそれらの間に設置され、前記1つの第1の導電層及び前記1つの第2の導電層は、静電容量式近接センサに属し、好ましくは、前記第1の導電層及び第2の導電層は、それぞれの導電性の生地を備え、前記中間層は、弾性降伏材料を備える、1つの第1の導電層及び1つの第2の導電層、
の少なくとも一方を備える、請求項11に記載の自動化装置。 - 前記複数のアクティブ層は、対応する前記センサ付き被覆モジュールの外面の、又はこれらの普及している部分のエリアに実質的に対応する表面積を有する、請求項11又は12に記載の自動化装置。
- 前記耐力構造は、その内側と前記自動化装置の前記可動構造の下に位置する部分との間に自由ギャップを画定するため、特に収容コンポーネントのため及び/又は換気通路の定義のために、実質的に丸い又は凹状のシェルと同様に形成される、請求項1から13の何れか一項に記載の自動化装置。
- 自動化装置の可動構造の少なくとも一部をカバーするために予め設定されたセンサ付き被覆材であって、前記センサ付き被覆材は、接触センサ手段及び近接センサ手段の少なくとも一方を含むセンサ手段を統合し、
前記センサ付き被覆材は、分離可能な方法で相互に連結可能であって、各々が、所定形状のそれぞれの耐力構造を有し、弾性降伏材料の少なくとも1つの層が、それに対して関連づけられる、複数の被覆モジュールを有する、
センサ付き被覆材。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102016000050634 | 2016-05-17 | ||
| ITUA2016A003520A ITUA20163520A1 (it) | 2016-05-17 | 2016-05-17 | "Dispositivo automatizzato con una struttura mobile, particolarmente un robot" |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017205867A true JP2017205867A (ja) | 2017-11-24 |
| JP6915802B2 JP6915802B2 (ja) | 2021-08-04 |
Family
ID=56940206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017083805A Active JP6915802B2 (ja) | 2016-05-17 | 2017-04-20 | 可動構造を有する自動化装置、特にロボット |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US20170334076A1 (ja) |
| EP (1) | EP3246136B1 (ja) |
| JP (1) | JP6915802B2 (ja) |
| KR (1) | KR102318069B1 (ja) |
| CN (1) | CN107443363B (ja) |
| BR (1) | BR102017008920B1 (ja) |
| CA (1) | CA2965054A1 (ja) |
| ES (1) | ES2775727T3 (ja) |
| IT (1) | ITUA20163520A1 (ja) |
| MX (1) | MX2017006186A (ja) |
| RU (1) | RU2727381C2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017213674A (ja) * | 2016-05-17 | 2017-12-07 | コマウ・ソシエタ・ペル・アチオニComau Societa Per Azioni | 工業用装置のためのセンサ付き被覆材 |
| JP2019209407A (ja) * | 2018-06-01 | 2019-12-12 | セイコーエプソン株式会社 | ロボット、制御装置およびロボットの制御方法 |
| WO2020045396A1 (ja) * | 2018-08-30 | 2020-03-05 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6677441B2 (ja) * | 2014-10-20 | 2020-04-08 | 株式会社デンソーウェーブ | ロボット、ロボットの形状設計方法 |
| US11518051B2 (en) | 2017-02-07 | 2022-12-06 | Veo Robotics, Inc. | Dynamic, interactive signaling of safety-related conditions in a monitored environment |
| US11820025B2 (en) | 2017-02-07 | 2023-11-21 | Veo Robotics, Inc. | Safe motion planning for machinery operation |
| US11541543B2 (en) | 2017-02-07 | 2023-01-03 | Veo Robotics, Inc. | Dynamic, interactive signaling of safety-related conditions in a monitored environment |
| CA3052961A1 (en) | 2017-02-07 | 2018-08-16 | Veo Robotics, Inc. | Workspace safety monitoring and equipment control |
| JP2018155712A (ja) * | 2017-03-21 | 2018-10-04 | 住友理工株式会社 | センサ装置 |
| JP6687573B2 (ja) * | 2017-09-07 | 2020-04-22 | ファナック株式会社 | ロボットシステム |
| IT201700121883A1 (it) | 2017-10-26 | 2019-04-26 | Comau Spa | "Dispositivo automatizzato con una struttura mobile, in particolare un robot" |
| JP6629826B2 (ja) * | 2017-12-25 | 2020-01-15 | ファナック株式会社 | ロボットとその線条体処理構造 |
| US20210205995A1 (en) * | 2018-02-06 | 2021-07-08 | Clara Vu | Robot end-effector sensing and identification |
| DE102018206019B4 (de) * | 2018-04-19 | 2021-01-21 | Kuka Deutschland Gmbh | Robotersystem und Verfahren zum Betreiben des Robotersystems |
| JP2020001099A (ja) * | 2018-06-25 | 2020-01-09 | セイコーエプソン株式会社 | 制御装置、ロボット、及び、ロボットシステム |
| CN109366523B (zh) * | 2018-11-14 | 2023-09-26 | 华南理工大学 | 一种可移动式空间可调节双臂机器人底座装置 |
| CN112475897B (zh) * | 2020-11-23 | 2022-03-29 | 陕西固德电子技术有限公司 | 一种焊接机器人 |
| CN114536352B (zh) * | 2020-11-27 | 2023-09-12 | 三赢科技(深圳)有限公司 | 机械定位结构及机械手组件 |
| ES2915903B2 (es) * | 2021-12-15 | 2023-10-25 | Univ Madrid Politecnica | Dispositivo sensor para la medida de fuerzas y pares y método de fabricación de dicho dispositivo sensor |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001239479A (ja) * | 1999-12-24 | 2001-09-04 | Sony Corp | 脚式移動ロボット及びロボットのための外装モジュール |
| JP2003071778A (ja) * | 2001-09-05 | 2003-03-12 | National Institute Of Advanced Industrial & Technology | ロボットアーム用触覚センサー |
| US20030137219A1 (en) * | 2001-12-19 | 2003-07-24 | Peter Heiligensetzer | Device and method for securing apparatuses with parts freely movable in space |
| JP2005103751A (ja) * | 2003-10-01 | 2005-04-21 | Korea Advanced Inst Of Science & Technol | 衝撃吸収構造を有するロボットアーム |
| JP2007015050A (ja) * | 2005-07-07 | 2007-01-25 | Kawada Kogyo Kk | 精密機器の外装構造および移動ロボット |
| JP2007102719A (ja) * | 2005-10-07 | 2007-04-19 | Toyota Motor Corp | 接触点検出装置およびこれを用いたロボット |
| US20110307097A1 (en) * | 2009-02-27 | 2011-12-15 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Protective skin for robots |
| JP2014507633A (ja) * | 2010-12-29 | 2014-03-27 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 機械部品での周辺監視のためのセンサシステムおよびセンサシステムの駆動制御および評価方法 |
| WO2016041653A1 (de) * | 2014-09-16 | 2016-03-24 | Robert Bosch Gmbh | Kapazitiver sensor |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63238502A (ja) * | 1987-03-27 | 1988-10-04 | Yokohama Rubber Co Ltd:The | 近接覚・触覚センサ |
| AUPN744696A0 (en) * | 1996-01-05 | 1996-02-01 | Appleyard, Thomas John | Safety apparatus and protection method for machines |
| CN1057246C (zh) * | 1998-07-01 | 2000-10-11 | 中国科学院合肥智能机械研究所 | 一种多功能类皮肤型传感器 |
| DE202005002475U1 (de) * | 2005-02-15 | 2006-06-22 | Heiligensetzer, Peter, Dr.-Ing. | Kollisionskraftmindernde Schaumstoffabdeckung für Industrieroboter |
| GB0624242D0 (en) * | 2006-12-05 | 2007-01-10 | Oliver Crispin Robotics Ltd | Improvements in and relating to robotic arms |
| JP5162799B2 (ja) * | 2008-05-30 | 2013-03-13 | 株式会社フジクラ | 接近制御装置および接近センサ |
| EP2515380B1 (de) * | 2011-04-19 | 2016-05-25 | Pepperl + Fuchs GmbH | Feldgeräte für erhöhte Sicherheit |
| JP5880935B2 (ja) * | 2011-12-20 | 2016-03-09 | セイコーエプソン株式会社 | センサーデバイス、センサーモジュール、ロボット、センサーデバイスの製造方法 |
| RU2531864C1 (ru) * | 2013-06-14 | 2014-10-27 | Федеральное государственное автономное образовательное учреждение высшего профессионального образования "Южный федеральный университет" (Южный федеральный университет) | Устройство управления подвижным объектом |
| CN103424034B (zh) * | 2013-08-19 | 2015-03-25 | 青岛大学 | 一种防红外伪装遮蔽物 |
| CN104748769B (zh) * | 2013-12-25 | 2017-08-04 | 北京纳米能源与系统研究所 | 一种基于静电感应的传感器以及传感方法 |
| JP5902664B2 (ja) * | 2013-12-25 | 2016-04-13 | ファナック株式会社 | 保護部材を有する人協調型産業用ロボット |
-
2016
- 2016-05-17 IT ITUA2016A003520A patent/ITUA20163520A1/it unknown
-
2017
- 2017-04-19 ES ES17167000T patent/ES2775727T3/es active Active
- 2017-04-19 EP EP17167000.3A patent/EP3246136B1/en active Active
- 2017-04-20 JP JP2017083805A patent/JP6915802B2/ja active Active
- 2017-04-24 CA CA2965054A patent/CA2965054A1/en not_active Abandoned
- 2017-04-24 RU RU2017114052A patent/RU2727381C2/ru active
- 2017-04-27 BR BR102017008920-7A patent/BR102017008920B1/pt active IP Right Grant
- 2017-05-11 MX MX2017006186A patent/MX2017006186A/es unknown
- 2017-05-12 KR KR1020170059027A patent/KR102318069B1/ko active IP Right Grant
- 2017-05-16 US US15/596,326 patent/US20170334076A1/en not_active Abandoned
- 2017-05-17 CN CN201710348340.7A patent/CN107443363B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001239479A (ja) * | 1999-12-24 | 2001-09-04 | Sony Corp | 脚式移動ロボット及びロボットのための外装モジュール |
| US20010030523A1 (en) * | 1999-12-24 | 2001-10-18 | Naoto Mori | Legged mobile robot and external module for the robot |
| JP2003071778A (ja) * | 2001-09-05 | 2003-03-12 | National Institute Of Advanced Industrial & Technology | ロボットアーム用触覚センサー |
| US20030137219A1 (en) * | 2001-12-19 | 2003-07-24 | Peter Heiligensetzer | Device and method for securing apparatuses with parts freely movable in space |
| JP2005103751A (ja) * | 2003-10-01 | 2005-04-21 | Korea Advanced Inst Of Science & Technol | 衝撃吸収構造を有するロボットアーム |
| JP2007015050A (ja) * | 2005-07-07 | 2007-01-25 | Kawada Kogyo Kk | 精密機器の外装構造および移動ロボット |
| JP2007102719A (ja) * | 2005-10-07 | 2007-04-19 | Toyota Motor Corp | 接触点検出装置およびこれを用いたロボット |
| US20110307097A1 (en) * | 2009-02-27 | 2011-12-15 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Protective skin for robots |
| JP2014507633A (ja) * | 2010-12-29 | 2014-03-27 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 機械部品での周辺監視のためのセンサシステムおよびセンサシステムの駆動制御および評価方法 |
| WO2016041653A1 (de) * | 2014-09-16 | 2016-03-24 | Robert Bosch Gmbh | Kapazitiver sensor |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017213674A (ja) * | 2016-05-17 | 2017-12-07 | コマウ・ソシエタ・ペル・アチオニComau Societa Per Azioni | 工業用装置のためのセンサ付き被覆材 |
| JP2019209407A (ja) * | 2018-06-01 | 2019-12-12 | セイコーエプソン株式会社 | ロボット、制御装置およびロボットの制御方法 |
| JP7206638B2 (ja) | 2018-06-01 | 2023-01-18 | セイコーエプソン株式会社 | ロボット、制御装置およびロボットの制御方法 |
| WO2020045396A1 (ja) * | 2018-08-30 | 2020-03-05 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
| JP2020032493A (ja) * | 2018-08-30 | 2020-03-05 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
| KR20210047914A (ko) | 2018-08-30 | 2021-04-30 | 카와사키 주코교 카부시키 카이샤 | 완충 장치 및 이를 구비하는 로봇 |
| JP7156865B2 (ja) | 2018-08-30 | 2022-10-19 | 川崎重工業株式会社 | 緩衝装置及びそれを備えるロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107443363A (zh) | 2017-12-08 |
| CN107443363B (zh) | 2021-12-17 |
| RU2017114052A3 (ja) | 2020-03-19 |
| EP3246136A1 (en) | 2017-11-22 |
| BR102017008920B1 (pt) | 2022-11-16 |
| RU2017114052A (ru) | 2018-11-01 |
| MX2017006186A (es) | 2018-08-28 |
| KR20170129616A (ko) | 2017-11-27 |
| BR102017008920A2 (pt) | 2017-12-05 |
| EP3246136B1 (en) | 2020-02-19 |
| RU2727381C2 (ru) | 2020-07-21 |
| KR102318069B1 (ko) | 2021-10-28 |
| CA2965054A1 (en) | 2017-11-17 |
| JP6915802B2 (ja) | 2021-08-04 |
| ITUA20163520A1 (it) | 2017-11-17 |
| ES2775727T3 (es) | 2020-07-28 |
| US20170334076A1 (en) | 2017-11-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017205867A (ja) | 可動構造を有する自動化装置、特にロボット | |
| JP6953658B2 (ja) | 自動化装置 | |
| JP7298811B2 (ja) | 自動装置 | |
| Gambao et al. | A new generation of collaborative robots for material handling | |
| US9975240B2 (en) | Robot, controller, and robot system | |
| US20160031078A1 (en) | Robot and device having multi-axis motion sensor, and method of use thereof | |
| CN113771026A (zh) | 一种提升安全控制性能的工业机器人及其控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191119 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210615 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210706 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6915802 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |