JP2016128778A - 操作検知装置 - Google Patents
操作検知装置 Download PDFInfo
- Publication number
- JP2016128778A JP2016128778A JP2015003396A JP2015003396A JP2016128778A JP 2016128778 A JP2016128778 A JP 2016128778A JP 2015003396 A JP2015003396 A JP 2015003396A JP 2015003396 A JP2015003396 A JP 2015003396A JP 2016128778 A JP2016128778 A JP 2016128778A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- detection device
- voltage
- movable electrode
- operation detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
【課題】電圧を計測する箇所が少なくて済む操作検知装置を提供する。【解決手段】操作検知装置1は、第1センサ2と、第2センサ3と、操作部4とを備える。操作部4は、第1センサ2と第2センサ3とに掛け渡され、且つ操作面41を有し、操作面41に加えられる力を第1センサ2及び第2センサ3に伝達する。第1センサ2は、操作面41に加えられる力の大きさに応じて、可動電極と固定電極とで構成されるキャパシタの静電容量を変化させるように構成されている。第1センサ2は、充電され、充電により蓄積された電荷の一部を第2センサ3に移動させ、移動後の固定電極と可動電極との間の電圧が取り出されるように構成されている。【選択図】図1
Description
本発明は、一般に操作検知装置、より詳細には静電容量の変化を利用して利用者の操作を検知する操作検知装置に関する。
従来、キャパシタの静電容量の変化を用いて操作部の状態を検知する装置が知られており、例えば特許文献1に開示されている。特許文献1に記載の従来例は、指で操作される操作部と、操作部に取り付けられる金属板と、金属板と相対する4つの電極とを備えている。この従来例では、金属板を共通電位の電極として、各電極との間に4つのキャパシタが構成されている。そして、この従来例は、各電極の電圧を(アナログ)演算回路で演算することにより、各キャパシタの静電容量の変化を検出し、操作部の移動方向や移動量、操作部を指で押し下げたときの押圧を検出している。
しかしながら、上記従来例では、操作部の移動量など、操作部に加えられる力の状態を検知するためには、各キャパシタの静電容量の変化を検出する必要があり、電極ごとに電圧を計測する必要がある。このため、上記従来例は、キャパシタの数だけ電圧を計測する箇所が増大するという問題があった。
本発明は、上記の点に鑑みてなされており、電圧を計測する箇所が少なくて済む操作検知装置を提供することを目的とする。
本発明の操作検知装置は、それぞれ固定電極と可動電極とを有し、互いに離間して配置される第1センサ及び第2センサと、前記第1センサと前記第2センサとに掛け渡され、且つ操作面を有し、前記操作面に加えられる力を前記第1センサ及び前記第2センサに伝達する操作部とを備え、前記第1センサ及び前記第2センサは、それぞれ前記操作面に加えられる力の大きさに応じて、前記可動電極と前記固定電極とで構成されるキャパシタの静電容量を変化させるように構成され、前記第1センサは、充電され、充電により蓄積された電荷の一部を前記第2センサに移動させ、移動後の前記固定電極と前記可動電極との間の電圧が取り出されるように構成されていることを特徴とする。
この操作検知装置において、前記第1センサ及び前記第2センサが載置される基台と、前記操作部と前記基台との間に配置される弾性を有する保持部とを備えることが好ましい。
この操作検知装置において、前記保持部は、前記第1センサ及び前記第2センサの並ぶ方向において、前記第1センサと前記第2センサとの間の範囲外に配置されることが好ましい。
この操作検知装置において、前記操作部は、前記第1センサの前記可動電極、及び前記第2センサの前記可動電極を押す弾性を有する押圧部を有することが好ましい。
この操作検知装置において、前記操作部は、前記第1センサ及び前記第2センサの少なくとも一方と、前記押圧部とを覆うキャップを有することが好ましい。
この操作検知装置において、前記押圧部は、接着剤であることが好ましい。
この操作検知装置において、前記第1センサ及び前記第2センサに対する前記操作部の移動のうち、前記操作面に沿う向きの移動を規制する規制部を備えることが好ましい。
この操作検知装置において、前記操作面の一部を覆う位置に配置されることにより、前記操作面の操作可能な範囲を制限するカバーを備えることが好ましい。
この操作検知装置において、前記第1センサ及び前記第2センサを制御する制御部をさらに備え、前記制御部は、前記第1センサの前記キャパシタを充電させる第1処理と、前記第1処理により前記第1センサの前記キャパシタに蓄積された電荷の一部を、前記第2センサの前記キャパシタに移動させる第2処理と、前記第2処理後に、前記第1センサの前記固定電極と前記可動電極との間の前記電圧に対応する検知電圧を計測する第3処理とを実行するように構成されていることが好ましい。
この操作検知装置において、前記制御部は、前記第1センサの前記固定電極と前記可動電極の何れか一方の電極、及び前記第2センサの前記固定電極と前記可動電極の何れか一方の電極の各々に電気的に接続される第1端子と、前記第2センサの前記固定電極と前記可動電極とのうち他方の電極に電気的に接続される第2端子とを有し、前記第1端子は、高インピーダンス、ハイレベル、ローレベルの何れかの状態に切り替えられるように構成され、前記第2端子は、高インピーダンス、ローレベルの何れかの状態に切り替えられるように構成されていることが好ましい。
この操作検知装置において、前記検知電圧は、前記操作面のうち力が加えられる力点の位置に応じて非線形に変化する第1特性と、前記第1特性とは異なる第2特性とを有し、前記制御部は、前記第2特性における前記検知電圧の変化に応じて前記操作面に加えられる力を検知することが好ましい。
この操作検知装置において、前記制御部は、前記検知電圧の時系列変化に応じて前記操作面のうち力が加えられる力点の移動する向きを検知することが好ましい。
この操作検知装置において、前記検知電圧は、前記操作面のうち力が加えられる力点の位置に応じて非線形に変化する第1特性と、前記第1特性とは異なる第2特性とを有し、前記制御部は、前記第2特性における前記検知電圧の変化に応じて前記操作面に加えられる力の大きさを検知する処理を実行する第1検知モードと、前記検知電圧の時系列変化に応じて前記力点の移動する向きを検知する処理を実行する第2検知モードとを有し、さらに、前記制御部は、第1閾値電圧と、前記第1閾値電圧よりも高い第2閾値電圧とを用いて、前記検知電圧が前記第1閾値電圧と前記第2閾値電圧との間にある場合に前記第2検知モードに切り替えられ、前記検知電圧が前記第1閾値電圧よりも低い、または前記第2閾値電圧よりも高い場合に前記第1検知モードに切り替えられるように構成されていることが好ましい。
この操作検知装置において、前記操作部は、前記第1センサ及び前記第2センサの並ぶ方向において、前記第1センサと前記第2センサとの間の範囲外となる位置に、前記操作面から突出する突起を有することが好ましい。
本発明は、2つのキャパシタを用いているにも関わらず、1箇所の電圧を計測するだけで操作部に加えられる力の状態を検知することができる。したがって、本発明は、電圧を計測する箇所が少なくて済む。
本発明の実施形態に係る操作検知装置1は、図1Aに示すように、第1センサ2と、第2センサ3と、操作部4とを備える。第1センサ2及び第2センサ3は、図2Aに示すように、それぞれ固定電極22(32)と可動電極24(34)とを有している。また、第1センサ2と第2センサ3とは、図1Aに示すように、互いに離間して配置される。
操作部4は、図1Aに示すように、第1センサ2と第2センサ3とに掛け渡されている。また、操作部4は、操作面41を有し、操作面41に加えられる力を第1センサ2及び第2センサ3に伝達する。
第1センサ2は、操作面41に加えられる力の大きさに応じて、可動電極24と固定電極22とで構成されるキャパシタ(第1キャパシタ)C1の静電容量Cs1を変化させるように構成されている(図3A参照)。また、第2センサ3は、操作面41に加えられる力に応じて、可動電極34と固定電極32とで構成されるキャパシタ(第2キャパシタ)C2の静電容量Cs2を変化させるように構成されている(図3A参照)。
そして、第1センサ2は、充電され、充電により蓄積された電荷の一部を第2センサ3に移動させ、移動後の固定電極22と可動電極24との間の電圧(検知電圧)が取り出されるように構成されている。
以下、本実施形態の操作検知装置1について詳細に説明する。但し、以下に説明する構成は、本発明の一例に過ぎず、本発明は下記の実施形態に限定されることはなく、この実施形態以外であっても、本発明に係る技術的思想を逸脱しない範囲であれば、設計等に応じて種々の変更が可能である。
また、以下の説明では、操作板40の厚さ方向を上下方向とし、操作板40から見て基台5側を下方、基台5から見て操作板40側を上方とする。さらに、以下の説明では、第1センサ2と第2センサ3とが並ぶ方向を左右方向とし、第1センサ2から見て第2センサ3側を左方、第2センサ3から見て第1センサ2側を右方として説明する。なお、上記の方向の規定は、本実施形態の操作検知装置1の使用形態を限定する趣旨ではない。
<基本構成>
まず、本実施形態の操作検知装置1の基本構成について説明する。本実施形態の操作検知装置1は、図1A,図1Bに示すように、第1センサ2と、第2センサ3と、操作部4とを備えている。また、本実施形態の操作検知装置1は、図3A〜図3Cに示すように、制御部6を備えている。第1センサ2及び第2センサ3は、基台5の上面に載置されている。また、第1センサ2と第2センサ3とは、左右方向において互いに離間して配置されている。
まず、本実施形態の操作検知装置1の基本構成について説明する。本実施形態の操作検知装置1は、図1A,図1Bに示すように、第1センサ2と、第2センサ3と、操作部4とを備えている。また、本実施形態の操作検知装置1は、図3A〜図3Cに示すように、制御部6を備えている。第1センサ2及び第2センサ3は、基台5の上面に載置されている。また、第1センサ2と第2センサ3とは、左右方向において互いに離間して配置されている。
第1センサ2は、図2Aに示すように、基板21と、固定電極22と、誘電体23と、可動電極24とを備えている。同様に、第2センサ3は、図2Aに示すように、基板31と、固定電極32と、誘電体33と、可動電極34とを備えている。固定電極22(32)は、基板21(31)の上面に固定されている。なお、第1センサ2と第2センサ3とは同様の構成である。このため、図2A,図2Bは、何れも第1センサ2の構成を示すとともに、括弧書きで第2センサ3の構成を示している。
誘電体23(33)は、固定電極22(32)と可動電極24(34)との間に設けられている。可動電極24(34)は、図2Bに示すように、上方から力(図2Bにおける矢印参照)を加えられることにより、固定電極22(32)に向かって撓むように構成されている。
第1センサ2において、固定電極22と可動電極24とはキャパシタ(第1キャパシタ)C1を構成している(図3A参照)。同様に、第2センサ3において、固定電極32と可動電極34とはキャパシタ(第2キャパシタ)C2を構成している(図3A参照)。また、固定電極22(32)と可動電極24(34)との間には、間隔G1が設けられ、誘電体23(33)と可動電極24(34)との間には、空隙が設けられている。
ここで、可動電極24(34)は、上方から力が加えられると、空隙の間隔及び間隔G1が小さくなり、静電容量Cs1(Cs2)が大きくなる。加える力がさらに大きくなると、可動電極24(34)は誘電体23(33)に接触し、間隔G1が一定となる。そして、可動電極24(34)の誘電体23(33)との接触面積S1が増加する。キャパシタC1(C2)の静電容量Cs1(Cs2)は、この間隔G1と接触面積S1に応じて変化する。つまり、第1センサ2は、可動電極24に加えられる力の大きさに応じて、第1キャパシタC1の静電容量Cs1を変化させるように構成されている。同様に、第2センサ3は、可動電極34に加えられる力の大きさに応じて、第2キャパシタC2の静電容量Cs2を変化させるように構成されている。
なお、誘電体23(33)は、可動電極24(34)の下面に固定されていてもよい。この構成では、可動電極24(34)に加えられる力の大きさに応じて、固定電極22(32)と誘電体23(33)との間隔G1と、接触面積S1とが変化することで、キャパシタC1(C2)の静電容量Cs1(Cs2)が変化する。
このように、誘電体23(33)は、固定電極22(32)及び可動電極24(34)の少なくとも一方に設けることができる。
また、第1センサ2及び第2センサ3は、それぞれ誘電体23,33を備えていなくてもよい。この構成では、可動電極24(34)に加えられる力の大きさに応じて、固定電極22(32)と可動電極24(34)との間の空隙の間隔が変化することで、キャパシタC1(C2)の静電容量Cs1(Cs2)が変化する。
操作部4は、図1Aに示すように、第1センサ2と第2センサ3とに掛け渡されている。操作部4は、操作板40と、操作板40の上面である操作面41と、2つの押圧部42とを有している。
操作板40は、たとえば剛性を有する材料により、左右方向に長尺な板状に形成されている。剛性を有する材料は、たとえばポリカーボネート、アクリル等の樹脂材料や、アルミニウム、SUS(Steel Use Stainless)等の金属材料である。なお、操作板40は、剛性を有する材料で形成されていなくてもよく、たとえば可撓性を有する材料で形成されていてもよい。
各押圧部42は、たとえばシリコーンゴム、ウレタンゴム、エチレンプロピレンゴムなどの弾性を有する材料により形成されている。2つの押圧部42のうち一方の押圧部42は、第1センサ2と操作板40との間に設けられ、他方の押圧部42は、第2センサ3と操作板40との間に設けられている。押圧部42は、操作板40の下面に突起状に形成されている。押圧部42は、操作面41に加えられる力の大きさに応じて変形し、押圧部42の先端(下端)が第1センサ2の可動電極24及び第2センサ3の可動電極34を押すように構成されている。つまり、操作部4は、第1センサ2の可動電極24、及び第2センサ3の可動電極34を押す弾性を有する押圧部42を有する。
本実施形態の操作検知装置1では、操作面41に加えられる力は、押圧部42を介して第1センサ2の可動電極24、及び第2センサ3の可動電極34に伝達される。なお、本実施形態の操作検知装置1が押圧部42を備えるか否かは任意である。つまり、操作部4は、押圧部42を備えていなくとも、操作面41に加えられる力を第1センサ2及び第2センサ3に伝達するように構成されていればよい。
制御部6は、プログラムに従って動作するプロセッサを備えたマイコン(マイクロコンピュータ)のようなデバイスを主構成とし、所定のプログラムを実行することにより種々の機能を実現する。制御部6は、図3Aに示すように、第1端子61と、第2端子62と、第3端子63とを有している。
ここで、第1キャパシタC1の第1電極E11と第2電極E12とは、それぞれ第1センサ2の固定電極22と可動電極24とから選択される互いに異なる電極である。また、第2キャパシタC2の第1電極E21と第2電極E22とは、第2センサ3の固定電極32と可動電極34とから選択される互いに異なる電極である。
以下では、図3Aに示すように、第1キャパシタC1の第1電極E11を可動電極24、第2電極E12を固定電極22とし、第2キャパシタC2の第1電極E21を可動電極34、第2電極E22を固定電極32として説明する。
第1センサ2の可動電極24は、第2センサ3の可動電極34に電気的に接続されている。第1端子61は、第1センサ2の可動電極24及び第2センサ3の可動電極34の各々に電気的に接続されている。第1端子61は、制御部6に内蔵された3ステートバッファ(3 state buffer)機能により、高インピーダンス、ハイレベル、ローレベルの何れかの状態に切り替えられるように構成されている。本実施形態の操作検知装置1では、高インピーダンスの状態は、回路が開放されている状態である。また、ハイレベルの状態は、電源電圧Vd1(図7参照)を出力している状態である。また、ローレベルの状態は、回路グランドに接地されている状態である。なお、第1端子61は、抵抗を介して、第1センサ2の可動電極24及び第2センサ3の可動電極34の各々に電気的に接続されていてもよい。
第2端子62は、第2センサ3の固定電極32に電気的に接続されている。第2端子62は、制御部6に内蔵された機能により、ハイレベル、ローレベルの何れかの状態に切り替えられるように構成されている。なお、第2端子62は、抵抗を介して、第2センサ3の固定電極32に電気的に接続されていてもよい。
第3端子63は、第1センサ2の可動電極24及び第2センサ3の可動電極34の各々に電気的に接続されている。第3端子63には、第1キャパシタC1の電極間の電圧、つまり第1センサ2の固定電極22と可動電極24との間の電圧が入力される。同様に、第3端子63には、第2キャパシタC2の電極間の電圧、つまり第2センサ3の固定電極32と可動電極34との間の電圧が入力される。第3端子63に入力される電圧は、制御部6に内蔵されたADC(Analog to Digital Converter)機能により、ディジタル値に変換される。
ここで、第1端子61は、第1センサ2の固定電極22と可動電極24の何れか一方の電極、及び第2センサ3の固定電極32と可動電極34の何れか一方の電極の各々に電気的に接続されていればよい。また、第2端子62は、第2センサ3の固定電極32と可動電極34とのうち他方の電極に電気的に接続されていればよい。
<基本動作>
以下、本実施形態の操作検知装置1の基本動作について図3A〜図3Cを用いて説明する。以下の説明では、第1センサ2の固定電極22は、回路グランドに接地されていると仮定する。なお、図3A〜図3Cの各々における点線は、(正の)電荷の流れを表している。また、図3A〜図3Cにおいて、‘Hi−Z’は高インピーダンスの状態、‘L’はローレベル、‘H’はハイレベルを表している。
以下、本実施形態の操作検知装置1の基本動作について図3A〜図3Cを用いて説明する。以下の説明では、第1センサ2の固定電極22は、回路グランドに接地されていると仮定する。なお、図3A〜図3Cの各々における点線は、(正の)電荷の流れを表している。また、図3A〜図3Cにおいて、‘Hi−Z’は高インピーダンスの状態、‘L’はローレベル、‘H’はハイレベルを表している。
制御部6は、第1センサ2及び第2センサ3を制御するように構成されている。具体的には、制御部6は、以下に説明する第1処理、第2処理、第3処理、第4処理を実行するように構成されている。第1処理、第2処理及び第3処理、第4処理の各々に要する時間は、たとえば数μ秒である。本実施形態の操作検知装置1では、制御部6は、サンプリング周期ごとに第1処理〜第4処理を実行するように構成されている。
第1処理では、図3Aに示すように、制御部6は、第1端子61をハイレベルの状態、第2端子62を高インピーダンスの状態に切り替える。すると、第1センサ2の第1キャパシタC1に電源電圧Vd1が印加され、第1キャパシタC1が充電される。つまり、第1処理は、第1キャパシタC1を充電させる処理である。
第2処理では、図3Bに示すように、制御部6は、第1端子61を高インピーダンスの状態、第2端子62をローレベルの状態に切り替える。すると、第1キャパシタC1の静電容量Cs1と、第2キャパシタC2の静電容量Cs2との比に応じて、第1キャパシタC1に蓄積された電荷の一部が第2キャパシタC2に移動する。つまり、第2処理は、第1処理により第1センサ2の第1キャパシタC1に蓄積された電荷の一部を、第2センサ3の第2キャパシタC2に移動させる処理である。
第3処理では、第1キャパシタC1の電極間の電圧(または第2キャパシタC2の電極間の電圧)が第3端子63に入力される。制御部6は、第3端子63に入力された電圧を、ADC機能によりディジタル値に変換して取り込む。この入力電圧のディジタル値が検知電圧V1となる。つまり、第3処理は、第2処理後に、第1センサ2の固定電極22と可動電極24との間の電圧に対応する検知電圧V1を計測する処理である。なお、検知電圧V1をディジタル値に限定する趣旨ではなく、検知電圧V1は、アナログ値であってもよい。
第4処理では、図3Cに示すように、制御部6は、第1端子61をローレベルの状態、第2端子62をローレベルの状態に切り替える。すると、第1キャパシタC1及び第2キャパシタC2の各々に蓄積された電荷が放電される。つまり、第4処理は、第1センサ2の第1キャパシタC1、及び第2センサ3の第2キャパシタC2の各々に蓄積された電荷を放電させる処理である。
<検知電圧の特性>
ここで、検知電圧V1は、操作面41に加えられる力の大きさに応じて変化する。また、検知電圧V1は、操作面41のうち力が加えられる力点の位置に応じて変化する。操作面41に加えられる力の大きさの変化、及び力点の位置の変化に応じて、各キャパシタC1,C2の静電容量Cs1,Cs2が変化するからである。検知電圧V1は、電源電圧Vd1、第1キャパシタC1の静電容量Cs1、第2キャパシタC2の静電容量Cs2を用いて次式で表される。
ここで、検知電圧V1は、操作面41に加えられる力の大きさに応じて変化する。また、検知電圧V1は、操作面41のうち力が加えられる力点の位置に応じて変化する。操作面41に加えられる力の大きさの変化、及び力点の位置の変化に応じて、各キャパシタC1,C2の静電容量Cs1,Cs2が変化するからである。検知電圧V1は、電源電圧Vd1、第1キャパシタC1の静電容量Cs1、第2キャパシタC2の静電容量Cs2を用いて次式で表される。

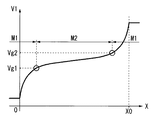
図4に、操作面41に所定の力を加えた場合における検知電圧V1の特性を示す。図4において、横軸は、操作面41における力点の位置X(図1A参照)を表している。また、図4において、縦軸は、検知電圧V1を表している。以下の説明では、左右方向において、第2センサ3の中心を通る直線と操作面41との交点を‘X=0’と規定する。また、以下の説明では、左右方向において、第1センサ2の中心を通る直線と操作面41との交点を‘X=X0’と規定する。
第1キャパシタC1の静電容量Cs1は、第1センサ2に近づく程(つまり、力点の位置Xが‘X0’に近づく程)大きくなり、第2センサ3に近づく程(つまり、力点の位置Xが‘0’に近づく程)小さくなる。第2キャパシタC2の静電容量Cs2は、第1センサ2に近づく程(つまり、力点の位置Xが‘X0’に近づく程)小さくなり、第2センサ3に近づく程(つまり、力点の位置Xが‘0’に近づく程)大きくなる。したがって、たとえば図4に示すように、‘X=X1’であるときの検知電圧V1は、‘X=X2(>X1)’であるときの検知電圧V1よりも小さくなる。
検知電圧V1は、第1特性と、第2特性とを有している。第1特性は、図4に示すように、操作面41のうち力が加えられる力点の位置Xに応じて非線形に変化する特性である。第2特性は、第1特性とは異なる特性である。本実施形態の操作検知装置1では、第2特性は、図4に示すように、力点の位置Xの変化に対して検知電圧V1が殆ど変化しない特性である。検知電圧V1は、図4に示すように、力点の位置Xが‘0’から‘X0’の間の範囲内にあるとき、第1特性を示す。また、検知電圧V1は、図4に示すように、力点の位置Xが‘0’から‘X0’の間の範囲外にあるとき、第2特性を示す。
第1特性は、図4に示すように、階段状の曲線で表される。より具体的には、第1特性を表す曲線の傾きは、力点の位置Xが‘X=0’、及び‘X=X0’に近づく程大きくなり、力点の位置Xが‘X=0’と‘X=X0’との中間点に近づく程小さくなる。第2特性は、第1特性とは異なり、略直線で表される。そして、検知電圧V1は、第1特性と第2特性との間に変曲点を有している。
本実施形態の操作検知装置1では、図1Aに示すように、操作面41は、第1センサ2と第2センサ3とが並ぶ方向(左右方向)において、第1センサ2と第2センサ3との間の範囲内である第1領域A1と、範囲外である第2領域A2とに分けられる。したがって、操作面41の第1領域A1に力が加えられると、検知電圧V1は第1特性を示す。また、操作面41の第2領域A2に力が加えられると、検知電圧V1は第2特性を示す。
<第1検知モード及び第2検知モード>
本実施形態の操作検知装置1では、制御部6は、上記の検知電圧V1の特性を利用して、操作部4に加えられる力の状態を検知するように構成されている。制御部6は、第1検知モードM1と、第2検知モードM2とを有している。
本実施形態の操作検知装置1では、制御部6は、上記の検知電圧V1の特性を利用して、操作部4に加えられる力の状態を検知するように構成されている。制御部6は、第1検知モードM1と、第2検知モードM2とを有している。
第1検知モードM1では、制御部6は、第2特性における検知電圧V1の変化に応じて、操作面41に加えられる力の大きさを検知する。既に述べたように、操作面41の第2領域A2に力を加える場合、検知電圧V1は第2特性を示す。そして、第2特性では、所定の力を加えた場合、その力を加える位置にほとんど依らず、検知電圧V1はほぼ一定になる。つまり、操作面41の第2領域A2では、検知電圧V1は、力点の位置Xにほとんど依らず、加えられる力の大きさに応じて変化する。
第1検知モードM1において、制御部6は、予めメモリに記憶している第1基準電圧Vs1及び第2基準電圧Vs2に基づいて、操作面41の第2領域A2に加えられる力の大きさを検知する。第1基準電圧Vs1は、図5Aに示すように、操作面41における‘X=0’の位置に所定の力を加えた場合の検知電圧V1である。第2基準電圧Vs2は、図5Aに示すように、操作面41における‘X=X0’の位置に所定の力を加えた場合の検知電圧V1である。各基準電圧Vs1,Vs2は、予め計測され、メモリに記憶されているのが好ましい。
たとえば、操作面41における左側の第2領域A2に力が加えられた場合、制御部6は、計測した検知電圧V1と第1基準電圧Vs1とを比較する。そして、加えられた力が上記の所定の力よりも小さい場合は、図5Bに示すように、検知電圧V1が第1基準電圧Vs1よりも大きくなる。また、たとえば、操作面41における右側の第2領域A2に力が加えられた場合、制御部6は、計測した検知電圧V1と第2基準電圧Vs2とを比較する。そして、加えられた力が上記の所定の力よりも小さい場合は、図5Bに示すように、検知電圧V1が第2基準電圧Vs2よりも小さくなる。
このように、第1検知モードM1においては、制御部6は、各基準電圧Vs1,Vs2に基づいて、操作面41に加えられる力の大きさを検知する。
第2検知モードM2では、制御部6は、検知電圧V1の時系列変化に応じて、操作面41のうち力が加えられる力点の移動する向きを検知する。既に述べたように、操作面41の第1領域A1に力を加える場合、検知電圧V1は第1特性を示す。そして、操作面41の第1領域A1では、検知電圧V1は、力点の位置Xに応じて変化する。
そこで、第2検知モードM2において、制御部6は、検知電圧V1の時系列変化に応じて、操作面41のうち力が加えられる力点の移動する向き、すなわちスワイプの向きを検知する。なお、スワイプとは、操作面41に触れた状態で利用者が指を滑らせる操作をいう。
たとえば、図4に示すように、任意の時刻において計測された検知電圧V1がVc1であり、その次に計測された検知電圧V1がVc2(>Vc1)であったとする。この場合、制御部6は、検知電圧V1の時系列変化に基づいて、操作面41における‘X=X3’の位置から‘X=X4(>X3)’の位置に力点が移動したと判定することができる。したがって、この場合、制御部6は、利用者が右向きにスワイプを行ったと検知する。
同様に、任意の時刻において計測された検知電圧V1がVc2であり、その次に計測された検知電圧V1がVc1であったとする。この場合、制御部6は、検知電圧V1の時系列変化に基づいて、操作面41における‘X=X4’の位置から‘X=X3’の位置に力点が移動したと判定することができる。したがって、この場合、制御部6は、利用者が左向きにスワイプを行ったと検知する。
ここで、本実施形態の操作検知装置1は、既に述べたように、検知電圧V1が力点の位置Xに応じて非線形に変化する第1特性を有する。このため、本実施形態の操作検知装置1は、検知電圧V1が力点の位置Xに応じて線形に変化する場合と比較して、検知電圧V1の変化に対する力点の位置Xの変化が大きいという利点がある。つまり、本実施形態の操作検知装置1は、検知電圧V1が力点の位置Xに応じて線形に変化する場合と比較して、スワイプを検知する範囲を広くすることができる。なお、検知電圧V1が力点の位置Xに応じて線形に変化する場合とは、たとえば各センサ2,3の代わりにピエゾ抵抗を用いたセンサを採用し、ピエゾ抵抗の抵抗値の変化により検知電圧V1を計測する場合である。
ところで、本実施形態の操作検知装置1では、制御部6は、図6に示すように、第1閾値電圧Vg1と、第1閾値電圧Vg1よりも高い第2閾値電圧Vg2とを用いて、第1検知モードM1と第2検知モードM2とを切り替えるように構成されている。具体的には、制御部6は、図6に示すように、検知電圧V1が第1閾値電圧Vg1と第2閾値電圧Vg2との間にある場合に、第2検知モードM2に切り替える。また、制御部6は、検知電圧V1が第1閾値電圧Vg1よりも低い、または第2閾値電圧Vg2よりも高い場合に、第1検知モードM1に切り替える。この構成では、検知電圧V1に応じて第1検知モードM1と第2検知モードM2とを適宜切り替えることができる。
なお、本実施形態の操作検知装置1では、制御部6は、第1検知モードM1と第2検知モードM2とを切り替えるように構成されているが、第1検知モードM1のみを有する構成であってもよい。また、制御部6は、第2検知モードM2のみを有する構成であってもよい。
上述のように、本実施形態の操作検知装置1では、第1センサ2は、充電され、充電により蓄積された電荷の一部を第2センサ3に移動させ、移動後の固定電極22と可動電極24との間の電圧(検知電圧)が取り出されるように構成されている。このため、本実施形態の操作検知装置1は、第1センサ2と第2センサ3とで2つのキャパシタC1,C2を用いているにも関わらず、1箇所の電圧を計測するだけで、操作部4に加えられる力の状態を検知することができる。したがって、本実施形態の操作検知装置1は、電圧を計測する箇所が少なくて済む。
また、本実施形態の操作検知装置1では、1箇所の電圧を計測するだけで操作部4に加えられる力の状態を検知できるので、計測に必要な回路構成を簡易にできる。つまり、本実施形態の操作検知装置1は、制御部6の小型化を図ることができ、また、製造コストも低減することができる。更に、本実施形態の操作検知装置1では、第1センサ2と第2センサ3として同じ種類の部品を用いることが可能である。このため、本実施形態の操作検知装置1では、第1センサ2及び第2センサ3の温度特性がほぼ同じであることから、温度が変化したとしても、数1で表される検知電圧V1に殆ど影響を及ぼさない。
なお、本実施形態の操作検知装置1が制御部6を備えるか否かは任意である。つまり、本実施形態の操作検知装置1は、外部の制御装置に上記の第1処理、第2処理、第3処理を実行させることで、上記と同様の作用効果を奏することができる。
ところで、本実施形態の操作検知装置1では、制御部6に内蔵された3ステートバッファ機能により、第1端子61は、高インピーダンス、ハイレベル、ローレベルの何れかの状態に切り替えるように構成されているが、他の構成であってもよい。たとえば、3ステートバッファ機能を有さないマイコンを制御部6に用いる場合、状態切替回路7により、第1端子61が高インピーダンス、ハイレベル、ローレベルの何れかの状態に切り替えるように構成されていてもよい。
状態切替回路7は、図7に示すように、第1入力端子71と、第2入力端子72と、出力端子73とを備える。第1入力端子71及び第2入力端子72は、それぞれ制御部6のマイコンの2つの出力ポートに電気的に接続される。マイコンは、第1入力端子71と第2入力端子72とにそれぞれ互いに独立した2値信号を入力する。出力端子73は、第1端子61に電気的に接続される。
また、状態切替回路7は、第1スイッチ74と、第2スイッチ75とを備える。第1スイッチ74は、Pチャネルのエンハンスメント型MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)である。第2スイッチ75は、Nチャネルのエンハンスメント型MOSFETである。第1スイッチ74のドレインは、外部電源に電気的に接続される。そして、第1スイッチ74のドレインには、電源電圧Vd1が印加される。第2スイッチ75のソースは、回路グランドに接地される。また、第1スイッチ74のソース及び第2スイッチ75のドレインは、出力端子73に電気的に接続される。第1スイッチ74及び第2スイッチ75は、CMOS(Complementary MOS)回路を構成する。
さらに、状態切替回路7は、NOT素子76と、NAND素子77と、NOR素子78とを備える。NOT素子76の入力端子は、第1入力端子71及びNAND素子77の第1入力端子771に電気的に接続される。また、NOT素子76の出力端子は、NOR素子78の第1入力端子に電気的に接続される。NAND素子77の第2入力端子772は、第2入力端子72及びNOR素子78の第2入力端子782に電気的に接続される。また、NAND素子77の出力端子は、第1スイッチ74のゲートに電気的に接続される。NOR素子78の出力端子は、第2スイッチ75のゲートに電気的に接続される。
状態切替回路7は、第1入力端子71及び第2入力端子72の各々に入力される2値信号により、以下の表1に示すように動作する。なお、表1において、‘A’は第1入力端子71の状態、‘B’は第2入力端子72の状態、‘C’は出力端子73の状態を表している。
したがって、3ステートバッファ機能を有さないマイコンを制御部6に用いる場合でも、状態切替回路7を用いることにより、第1端子61を高インピーダンス、ハイレベル、ローレベルの何れかの状態に切り替えることができる。なお、状態切替回路7は、第2端子62にも用いることができる。
以下、本実施形態の操作検知装置1の第1変形例〜第6変形例についてそれぞれ説明する。
<第1変形例>
第1変形例の操作検知装置1は、図8A,図8Bに示すように、弾性を有する保持部8を2つ備えている。ここでは、各保持部8は、ばね81で構成されている。なお、ばね81は、図8Aに示すようにコイルばねであってもよいし、板ばね等の他の形状のばねであってもよい。2つの保持部8のうち一方の保持部8は、操作板40の右端と基台5の右端との間に配置されている。また、2つの保持部8のうち他方の保持部8は、操作板40の左端と基台5の左端との間に配置されている。
第1変形例の操作検知装置1は、図8A,図8Bに示すように、弾性を有する保持部8を2つ備えている。ここでは、各保持部8は、ばね81で構成されている。なお、ばね81は、図8Aに示すようにコイルばねであってもよいし、板ばね等の他の形状のばねであってもよい。2つの保持部8のうち一方の保持部8は、操作板40の右端と基台5の右端との間に配置されている。また、2つの保持部8のうち他方の保持部8は、操作板40の左端と基台5の左端との間に配置されている。
つまり、本変形例の操作検知装置1は、第1センサ2及び第2センサ3が載置される基台5と、操作部4(操作板40)と基台5との間に配置される弾性を有する保持部8とを備えている。したがって、本変形例の操作検知装置1では、保持部8の弾性力が操作部4に働くことにより、操作部4の重さが第1センサ2及び第2センサ3に伝達し難い。このため、本変形例の操作検知装置1は、利用者が操作面41を操作しない場合に、第1センサ2の可動電極24及び第2センサ3の可動電極34が操作部4の自重等により変形してしまうのを防止することで、感度を向上することができる。
また、本変形例の操作検知装置1では、保持部8は、第1センサ2及び第2センサ3の並ぶ方向(左右方向)において、第1センサ2と第2センサ3との間の範囲外に配置されている。したがって、本変形例の操作検知装置1では、第1センサ及び第2センサ3の並ぶ方向において、保持部8が第1センサ2と第2センサ3との間で操作部4の支点とならない。このため、本変形例の操作検知装置1では、操作面41に力が加えられる際に、第1センサ2及び第2センサ3に伝達する力に偏りが生じ難く、動作の安定性を向上させることができる。なお、当該構成を採用するか否かは任意である。
なお、図8Cに示すように、保持部8は、たとえばゴムなどの弾性を有する材料により形成されたシート(またはテープ)82で構成されていてもよい。この構成では、保持部8をばね81で構成する場合と比較して、操作検知装置1を組み立て易いという利点がある。
<第2変形例>
第2変形例の操作検知装置1では、図9Aに示すように、操作部4は、2つのキャップ43を有している。各キャップ43は、たとえばゴムなどの弾性を有する材料により形成されている。また、各キャップ43は、下面を開口した中空の構造を有している。2つのキャップ43のうち一方のキャップ43は、第1センサ2及び押圧部42を覆う形で、操作部4と基台5との間に配置されている。また、2つのキャップ43のうち他方のキャップ43は、第2センサ3及び押圧部42を覆う形で、操作部4と基台5との間に配置されている。
第2変形例の操作検知装置1では、図9Aに示すように、操作部4は、2つのキャップ43を有している。各キャップ43は、たとえばゴムなどの弾性を有する材料により形成されている。また、各キャップ43は、下面を開口した中空の構造を有している。2つのキャップ43のうち一方のキャップ43は、第1センサ2及び押圧部42を覆う形で、操作部4と基台5との間に配置されている。また、2つのキャップ43のうち他方のキャップ43は、第2センサ3及び押圧部42を覆う形で、操作部4と基台5との間に配置されている。
つまり、本変形例の操作検知装置1では、操作部4は、第1センサ2及び第2センサ3の少なくとも一方と、押圧部42とを覆うキャップ43を有している。したがって、本変形例の操作検知装置1では、キャップ43は、第1センサ2(第2センサ3)と操作部4との間に介在する。このため、本変形例の操作検知装置1は、利用者が操作面41を操作しない場合に、操作部4の自重等により第1センサ2の可動電極24及び第2センサ3の可動電極34が変形するのを防止することで、感度を向上することができる。
また、本変形例の操作検知装置1では、第1センサ2及び第2センサ3がそれぞれキャップ43で覆われる。このため、本変形例の操作検知装置1では、キャップ43により第1センサ2及び第2センサ3を保護することができる。
なお、本変形例の操作検知装置1は、図9Bに示すように、薄膜状の保護部9を備えていてもよい。保護部9は、たとえばゴムなどの弾性を有する材料により形成されるフィルムであり、操作部4と2つのキャップ43との間に設けられている。また、保護部9は、第1センサ2及び第2センサ3を保護部9と基台5との外側の空間から隔てている。この構成では、保護部9により、第1センサ2及び第2センサ3の防水性及び防塵性を向上させることができる。また、この構成では、保護部9により操作部4(操作板40)が面で保持されるので、操作部4(操作板40)が傾き難く安定するという利点がある。
<第3変形例>
第3変形例の操作検知装置1では、図10Aに示すように、2つの押圧部42は、それぞれ弾性を有する接着剤421で構成されている。接着剤421は、たとえばシリコーン系の接着剤やウレタン系の接着剤である。2つの接着剤421のうち一方の接着剤421は、第1センサ2の可動電極24と操作板40の下面とを接着する。また、2つの接着剤421のうち他方の接着剤421は、第2センサ3の可動電極34と操作板40の下面とを接着する。
第3変形例の操作検知装置1では、図10Aに示すように、2つの押圧部42は、それぞれ弾性を有する接着剤421で構成されている。接着剤421は、たとえばシリコーン系の接着剤やウレタン系の接着剤である。2つの接着剤421のうち一方の接着剤421は、第1センサ2の可動電極24と操作板40の下面とを接着する。また、2つの接着剤421のうち他方の接着剤421は、第2センサ3の可動電極34と操作板40の下面とを接着する。
つまり、本変形例の操作検知装置1では、押圧部42は、接着剤421である。したがって、本変形例の操作検知装置1では、押圧部42は、予め成形される必要がない。また、本変形例の操作検知装置1では、接着剤421が広がることにより、操作部4(操作板40)が接着剤421に面で保持されるので、操作部4(操作板40)が傾き難く安定する。さらに、本変形例の操作検知装置1では、接着剤421により第1センサ2(第2センサ3)の可動電極24(34)と操作板40の下面とをそれぞれ接着できる。このため、本変形例の操作検知装置1は、予め成形された押圧部42を用いて組み立てる場合と比較して、実装精度が要求されないという利点がある。
なお、本変形例の操作検知装置1では、図10Bに示すように、接着剤421は、第1センサ2(第2センサ3)を覆うように構成されていてもよい。また、接着剤421は、操作板40の下面と基台5の上面とを接着していてもよい。この構成では、接着剤421により第1センサ2及び第2センサ3を保護することができる。
ところで、本変形例の操作検知装置1では、図11に示すように、たとえば制御部6を構成する回路部品51が、操作板40と基台5との間において基台5の上面に実装されている。この回路部品51は、ストッパとして用いられてもよい。すなわち、操作面41に過大な力が加えられた場合に、操作部4(操作板40)が回路部品51に接触することで、回路部品51がストッパとして働く。このため、回路部品51は、操作部4の下向きの移動を規制することができる。したがって、この構成では、操作面41に過大な力が加えられた場合に、第1センサ2及び第2センサ3が壊れるのを防止することができる。また、この構成では、既存の回路部品51をストッパとして用いるので、別途ストッパを設ける必要がない。
<第4変形例>
第4変形例の操作検知装置1では、図12Aに示すように、操作板40は、第1凹部44と、第2凹部45とを有している。第1凹部44は、第1センサ2と対向する位置に設けられており、上向きに窪んでいる。押圧部42は、突起状に形成され、第1凹部44の内底面と第1センサ2の可動電極24との間に配置されている。また、第1センサ2は、その一部が第1凹部44の内側に入り込むように配置されている。
第4変形例の操作検知装置1では、図12Aに示すように、操作板40は、第1凹部44と、第2凹部45とを有している。第1凹部44は、第1センサ2と対向する位置に設けられており、上向きに窪んでいる。押圧部42は、突起状に形成され、第1凹部44の内底面と第1センサ2の可動電極24との間に配置されている。また、第1センサ2は、その一部が第1凹部44の内側に入り込むように配置されている。
第2凹部45は、第2センサ3と対向する位置に設けられており、上向きに窪んでいる。押圧部42は、突起状に形成され、第2凹部45の内底面と第2センサ3の可動電極34との間に配置されている。また、第2センサ3は、その一部が第2凹部45の内側に入り込むように配置されている。
ここで、操作部4が操作面41に沿う向きに移動した場合、第1凹部44(第2凹部45)の内側面が第1センサ2(第2センサ3)の一部に接触することで、操作部4の移動が規制される。つまり、第1凹部44及び第2凹部45は、第1センサ2及び第2センサ3に対する操作部4の移動のうち、操作面41に沿う向きの移動を規制する規制部として機能する。言い換えれば、本変形例の操作検知装置1は、第1センサ2及び第2センサ3に対する操作部4の移動のうち、操作面41に沿う向きの移動を規制する規制部(第1凹部44、第2凹部45)を備えている。したがって、本変形例の操作検知装置1では、第1凹部44及び第2凹部45により、第1センサ2及び第2センサ3に対する操作部4の位置合わせが容易である。
また、本変形例の操作検知装置1では、第1凹部44(第2凹部45)の高さ寸法(上下方向の寸法)Z2は、操作面41に力が加えられていない状態における操作板40と基台5との間の高さ寸法Z1よりも大きい。このため、本変形例の操作検知装置1では、操作面41に過大な力が加えられた場合に、操作部4(操作板40)の下面が基台5の上面に接触することで、操作部4の下向きの移動が規制される。したがって、この構成では、操作面41に過大な力が加えられた場合に、第1センサ2及び第2センサ3が壊れるのを防止することができる。なお、当該構成を採用するか否かは任意である。
なお、図12Bに示すように、操作部4が弾性体46を有する場合、弾性体46に第1凹部44及び第2凹部45を設けてもよい。弾性体46は、たとえばゴムなどの弾性を有する材料により板状に形成されている。弾性体46は、操作板40の下面に取り付けられている。なお、操作板40は、弾性体46の中に埋め込まれていてもよい。
<第5変形例>
第5変形例の操作検知装置1は、図13A,図13Bに示すように、カバー10を備えている。また、本変形例の操作検知装置1では、操作板40は、左右方向の中央部において上向きに突出する凸部401を有している。なお、本変形例の操作検知装置1は2つの保持部8を備えているが、これら保持部8を備えるか否かは任意である。
第5変形例の操作検知装置1は、図13A,図13Bに示すように、カバー10を備えている。また、本変形例の操作検知装置1では、操作板40は、左右方向の中央部において上向きに突出する凸部401を有している。なお、本変形例の操作検知装置1は2つの保持部8を備えているが、これら保持部8を備えるか否かは任意である。
カバー10は、たとえば剛性を有する材料により、左右方向に長尺な板状に形成されている。カバー10は、操作部4とは異なる部材に固定されている。また、カバー10の中央部には、矩形状の開口101が設けられている。カバー10は、凸部401を除いて操作板40の上面(操作面41)を覆う形で配置されている。言い換えれば、カバー10は、操作面41の一部を覆う位置に配置されている。凸部401は、カバー10の開口101を通して外部に臨む。本変形例の操作検知装置1では、この凸部401の上面が操作面41の操作可能な範囲となる。
したがって、本変形例の操作検知装置1では、操作面41の操作可能な範囲は、操作板40の上面全てではなく、凸部401の上面に制限される。つまり、本変形例の操作検知装置1は、操作面41の一部を覆う位置に配置されることにより、操作面41の操作可能な範囲を制限するカバー10を備えている。このため、本変形例の操作検知装置1では、たとえば制御部6を第2検知モードM2で機能させる場合に、操作面41の操作可能な範囲を、第2検知モードM2に適した第1領域A1に対応する範囲に制限することができる。
なお、カバー10は、開口101を有していなくてもよい。たとえば、図13Cに示すように、カバー10は、第1カバー102と第2カバー103との2つの部材で構成されていてもよい。この構成では、左右方向において凸部401を挟む形で第1カバー102と第2カバー103とが配置されていればよい。
また、本変形例の操作検知装置1では、カバー10により、操作面41の操作可能な範囲を第1領域A1に対応する範囲に制限しているが、操作面41の操作可能な範囲を第2領域A2に対応する範囲に制限する構成であってもよい。この構成は、制御部6を第1検知モードM1で機能させる場合に有用である。
<第6変形例>
第6変形例の操作検知装置1では、図14に示すように、操作面41に2つの突起411が設けられている。2つの突起411のうち一方の突起411は、操作面41における右側の第2領域A2に対応する位置で、上向きに突出するように設けられている。また、2つの突起411のうち他方の突起411は、操作面41における左側の第2領域A2に対応する位置で、上向きに突出するように設けられている。
第6変形例の操作検知装置1では、図14に示すように、操作面41に2つの突起411が設けられている。2つの突起411のうち一方の突起411は、操作面41における右側の第2領域A2に対応する位置で、上向きに突出するように設けられている。また、2つの突起411のうち他方の突起411は、操作面41における左側の第2領域A2に対応する位置で、上向きに突出するように設けられている。
つまり、本変形例の操作検知装置1では、操作部4は、第1センサ2及び第2センサ3の並ぶ方向(左右方向)において、第1センサ2と第2センサ3との間の範囲外となる位置に、操作面41から突出する突起411を有している。この構成は、制御部6が第1検知モードM1と第2検知モードM2とを切り替えるように構成されている場合に、とくに有用である。すなわち、突起411に利用者の指先を触れさせることで、検知電圧V1が第2特性を示す第2領域A2の位置を、利用者に指先の触覚により確認させることができる。したがって、利用者は、突起411に力を加えることで、制御部6を第1検知モードM1で機能させることができる。また、利用者は、操作面41における突起411が設けられていない範囲をスワイプすることで、制御部6を第2検知モードM2で機能させることができる。
なお、本実施形態の操作検知装置1は、2つのセンサ(第1センサ2、第2センサ3)を用いているが、更に多数のセンサを用いてもよい。この場合、操作検知装置1は、複数のセンサのうち使用するセンサを選択するためのスイッチを備えることが好ましい。
1 操作検知装置
2 第1センサ
22 固定電極
24 可動電極
3 第2センサ
32 固定電極
34 可動電極
4 操作部
41 操作面
411 突起
42 押圧部
421 接着剤
43 キャップ
44 第1凹部(規制部)
45 第2凹部(規制部)
5 基台
6 制御部
61 第1端子
62 第2端子
8 保持部
10 カバー
C1 (第1)キャパシタ
Cs1 (第1)キャパシタの静電容量
C2 (第2)キャパシタ
Cs2 (第2)キャパシタの静電容量
M1 第1検知モード
M2 第2検知モード
V1 検知電圧
Vg1 第1閾値電圧
Vg2 第2閾値電圧
X 力点の位置
2 第1センサ
22 固定電極
24 可動電極
3 第2センサ
32 固定電極
34 可動電極
4 操作部
41 操作面
411 突起
42 押圧部
421 接着剤
43 キャップ
44 第1凹部(規制部)
45 第2凹部(規制部)
5 基台
6 制御部
61 第1端子
62 第2端子
8 保持部
10 カバー
C1 (第1)キャパシタ
Cs1 (第1)キャパシタの静電容量
C2 (第2)キャパシタ
Cs2 (第2)キャパシタの静電容量
M1 第1検知モード
M2 第2検知モード
V1 検知電圧
Vg1 第1閾値電圧
Vg2 第2閾値電圧
X 力点の位置
Claims (14)
- それぞれ固定電極と可動電極とを有し、互いに離間して配置される第1センサ及び第2センサと、
前記第1センサと前記第2センサとに掛け渡され、且つ操作面を有し、前記操作面に加えられる力を前記第1センサ及び前記第2センサに伝達する操作部とを備え、
前記第1センサ及び前記第2センサは、それぞれ前記操作面に加えられる力の大きさに応じて、前記可動電極と前記固定電極とで構成されるキャパシタの静電容量を変化させるように構成され、
前記第1センサは、充電され、充電により蓄積された電荷の一部を前記第2センサに移動させ、移動後の前記固定電極と前記可動電極との間の電圧が取り出されるように構成されていることを特徴とする操作検知装置。 - 前記第1センサ及び前記第2センサが載置される基台と、
前記操作部と前記基台との間に配置される弾性を有する保持部とを備えることを特徴とする請求項1記載の操作検知装置。 - 前記保持部は、前記第1センサ及び前記第2センサの並ぶ方向において、前記第1センサと前記第2センサとの間の範囲外に配置されることを特徴とする請求項2記載の操作検知装置。
- 前記操作部は、前記第1センサの前記可動電極、及び前記第2センサの前記可動電極を押す弾性を有する押圧部を有することを特徴とする請求項1乃至3の何れか1項に記載の操作検知装置。
- 前記操作部は、前記第1センサ及び前記第2センサの少なくとも一方と、前記押圧部とを覆うキャップを有することを特徴とする請求項4記載の操作検知装置。
- 前記押圧部は、接着剤であることを特徴とする請求項4記載の操作検知装置。
- 前記第1センサ及び前記第2センサに対する前記操作部の移動のうち、前記操作面に沿う向きの移動を規制する規制部を備えることを特徴とする請求項1乃至6の何れか1項に記載の操作検知装置。
- 前記操作面の一部を覆う位置に配置されることにより、前記操作面の操作可能な範囲を制限するカバーを備えることを特徴とする請求項1乃至7の何れか1項に記載の操作検知装置。
- 前記第1センサ及び前記第2センサを制御する制御部をさらに備え、
前記制御部は、
前記第1センサの前記キャパシタを充電させる第1処理と、
前記第1処理により前記第1センサの前記キャパシタに蓄積された電荷の一部を、前記第2センサの前記キャパシタに移動させる第2処理と、
前記第2処理後に、前記第1センサの前記固定電極と前記可動電極との間の前記電圧に対応する検知電圧を計測する第3処理とを実行するように構成されていることを特徴とする請求項1乃至8の何れか1項に記載の操作検知装置。 - 前記制御部は、前記第1センサの前記固定電極と前記可動電極の何れか一方の電極、及び前記第2センサの前記固定電極と前記可動電極の何れか一方の電極の各々に電気的に接続される第1端子と、前記第2センサの前記固定電極と前記可動電極とのうち他方の電極に電気的に接続される第2端子とを有し、
前記第1端子は、高インピーダンス、ハイレベル、ローレベルの何れかの状態に切り替えられるように構成され、
前記第2端子は、高インピーダンス、ローレベルの何れかの状態に切り替えられるように構成されていることを特徴とする請求項9記載の操作検知装置。 - 前記検知電圧は、前記操作面のうち力が加えられる力点の位置に応じて非線形に変化する第1特性と、前記第1特性とは異なる第2特性とを有し、
前記制御部は、前記第2特性における前記検知電圧の変化に応じて前記操作面に加えられる力の大きさを検知することを特徴とする請求項9又は10記載の操作検知装置。 - 前記制御部は、前記検知電圧の時系列変化に応じて前記操作面のうち力が加えられる力点の移動する向きを検知することを特徴とする請求項9乃至11の何れか1項に記載の操作検知装置。
- 前記検知電圧は、前記操作面のうち力が加えられる力点の位置に応じて非線形に変化する第1特性と、前記第1特性とは異なる第2特性とを有し、
前記制御部は、前記第2特性における前記検知電圧の変化に応じて前記操作面に加えられる力を検知する処理を実行する第1検知モードと、前記検知電圧の時系列変化に応じて前記力点の移動する向きを検知する処理を実行する第2検知モードとを有し、
さらに、前記制御部は、第1閾値電圧と、前記第1閾値電圧よりも高い第2閾値電圧とを用いて、前記検知電圧が前記第1閾値電圧と前記第2閾値電圧との間にある場合に前記第2検知モードに切り替えられ、前記検知電圧が前記第1閾値電圧よりも低い、または前記第2閾値電圧よりも高い場合に前記第1検知モードに切り替えられるように構成されていることを特徴とする請求項9又は10記載の操作検知装置。 - 前記操作部は、前記第1センサ及び前記第2センサの並ぶ方向において、前記第1センサと前記第2センサとの間の範囲外となる位置に、前記操作面から突出する突起を有することを特徴とする請求項13記載の操作検知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015003396A JP2016128778A (ja) | 2015-01-09 | 2015-01-09 | 操作検知装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015003396A JP2016128778A (ja) | 2015-01-09 | 2015-01-09 | 操作検知装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016128778A true JP2016128778A (ja) | 2016-07-14 |
Family
ID=56384225
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015003396A Pending JP2016128778A (ja) | 2015-01-09 | 2015-01-09 | 操作検知装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016128778A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116971839A (zh) * | 2023-07-28 | 2023-10-31 | 西安科技大学 | 一种煤矿安全监测装置 |
-
2015
- 2015-01-09 JP JP2015003396A patent/JP2016128778A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116971839A (zh) * | 2023-07-28 | 2023-10-31 | 西安科技大学 | 一种煤矿安全监测装置 |
| CN116971839B (zh) * | 2023-07-28 | 2023-12-29 | 西安科技大学 | 一种煤矿安全监测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10503329B2 (en) | Capacitive sensing apparatus and methods | |
| US10353485B1 (en) | Multifunction input device with an embedded capacitive sensing layer | |
| KR101122875B1 (ko) | 표시 장치 | |
| US10551977B2 (en) | Pressure detection apparatus and intelligent terminal | |
| US9430103B2 (en) | Method and device for sensing control point on capacitive-type panel | |
| TWI570610B (zh) | 用於偵測接近之測定裝置與方法 | |
| TW200915161A (en) | Two-dimensional position sensor | |
| KR20060047866A (ko) | 힘센서, 힘검출 시스템 및 힘검출 프로그램 | |
| US20190362914A1 (en) | Determination system, determination method, and determination program | |
| US20100045593A1 (en) | Directional input device | |
| EP2913650A1 (en) | Pressure sensor for touch panel | |
| US20170115772A1 (en) | Methods and apparatus for a capacitive sensor | |
| US20080191715A1 (en) | Solid state navigation device | |
| JP5029144B2 (ja) | 静電容量型タッチスイッチ装置 | |
| US11114259B2 (en) | Switch body | |
| KR20200009206A (ko) | 압력 터치 센서 장치 | |
| JP2016128778A (ja) | 操作検知装置 | |
| CN106775100B (zh) | 触控显示面板和包含其的触控显示装置 | |
| US10452121B2 (en) | Method for detecting touch input and touch input device therefor | |
| JP2012510663A (ja) | パックタイプのポインティング装置、ポインティングシステム及びポインティング方法 | |
| US20090051656A1 (en) | Capacitance/voltage converting circuit, input apparatus using the same, electronic device, and capacitance/voltage converting method | |
| US20200005010A1 (en) | Cell structure and operation method for fingerprint sensor employing pseudo-direct scheme | |
| JP6075615B2 (ja) | 入力装置 | |
| KR101640664B1 (ko) | 다채널 스위치 모듈 | |
| KR101776667B1 (ko) | 디스플레이 모듈의 프레임을 이용하여 압력을 감지하는 압력감지장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20170208 |