JP2012110175A - 蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 - Google Patents
蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 Download PDFInfo
- Publication number
- JP2012110175A JP2012110175A JP2010258561A JP2010258561A JP2012110175A JP 2012110175 A JP2012110175 A JP 2012110175A JP 2010258561 A JP2010258561 A JP 2010258561A JP 2010258561 A JP2010258561 A JP 2010258561A JP 2012110175 A JP2012110175 A JP 2012110175A
- Authority
- JP
- Japan
- Prior art keywords
- battery pack
- deviation
- power storage
- storage device
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims description 18
- 239000003990 capacitor Substances 0.000 claims description 16
- 230000000903 blocking effect Effects 0.000 claims 3
- 238000001514 detection method Methods 0.000 description 14
- 230000008569 process Effects 0.000 description 11
- DYYLLTMYNNLNMB-DTQAZKPQSA-N [4-[(e)-2-(8,8-dimethyl-6,7-dihydro-5h-naphthalen-2-yl)prop-1-enyl]phenyl]methanol Chemical compound C=1C=C2CCCC(C)(C)C2=CC=1C(/C)=C/C1=CC=C(CO)C=C1 DYYLLTMYNNLNMB-DTQAZKPQSA-N 0.000 description 10
- 230000008859 change Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 230000005856 abnormality Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 230000004913 activation Effects 0.000 description 3
- 101710114762 50S ribosomal protein L11, chloroplastic Proteins 0.000 description 2
- 101710156159 50S ribosomal protein L21, chloroplastic Proteins 0.000 description 2
- 206010010099 Combined immunodeficiency Diseases 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000001360 collision-induced dissociation Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 101100028962 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) PDR1 gene Proteins 0.000 description 1
- 101150096622 Smr2 gene Proteins 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000003792 electrolyte Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
Abstract
【課題】各々がCIDを含む複数の電池パックが並列に設けられた構成を有する蓄電装置を備えたシステムにおいて、CIDの作動を精度よく検出する。
【解決手段】各々がCIDを有する複数の電池パックBP1,BP2を含む蓄電装置110のECU300は、基準値設定部310と、偏差演算部320と、判定部330とを備える。基準値設定部310は、予め定められたタイミングにおける、各電池パックの出力電圧と負荷装置200の入力電圧との偏差を基準偏差として設定する。偏差演算部320は、上記タイミングより後において、各電池パックについて、各電池パックの出力電圧および負荷装置200の入力電圧の偏差と、基準偏差との各差分値を演算する。判定部330は、一方の電池パックの差分値の大きさが第1のしきい値を上回り、かつ他方の電池パックの差分値の大きさが第2のしきい値を下回る場合は、第1のしきい値を上回った電池パックに対応するCIDが作動したと判定する。
【選択図】図5
【解決手段】各々がCIDを有する複数の電池パックBP1,BP2を含む蓄電装置110のECU300は、基準値設定部310と、偏差演算部320と、判定部330とを備える。基準値設定部310は、予め定められたタイミングにおける、各電池パックの出力電圧と負荷装置200の入力電圧との偏差を基準偏差として設定する。偏差演算部320は、上記タイミングより後において、各電池パックについて、各電池パックの出力電圧および負荷装置200の入力電圧の偏差と、基準偏差との各差分値を演算する。判定部330は、一方の電池パックの差分値の大きさが第1のしきい値を上回り、かつ他方の電池パックの差分値の大きさが第2のしきい値を下回る場合は、第1のしきい値を上回った電池パックに対応するCIDが作動したと判定する。
【選択図】図5
Description
本発明は、蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法に関し、より特定的には、蓄電装置に含まれる電流遮断装置(Current Interrupt Device:CID)の作動を検出するための技術に関する。
近年、環境に配慮した車両として、蓄電装置(たとえば二次電池やキャパシタなど)を搭載し、蓄電装置に蓄えられた電力から生じる駆動力を用いて走行する車両が注目されている。この車両には、たとえば電気自動車、ハイブリッド自動車、燃料電池車などが含まれる。
このような蓄電装置は、一般的に、複数のバッテリセルを直列または並列に積層することによって、所望の電圧を出力するように構成される。これらのバッテリセルにおいて、断線や短絡などの異常が発生した場合には、蓄電装置の機能が正常に発揮されない場合が生じ得る。そのため、バッテリセルの異常を検出することが必要となる。
特開2007−018871号公報(特許文献1)は、蓄電装置内のセルにおける過電圧の発生の有無を検出するための電圧検出回路を有するシステムにおいて、当該電圧検出回路に機能不全または通信異常などの異常が生じた場合の制御を開示する。
特開2007−018871号公報(特許文献1)によれば、電圧検出回路に異常が生じた場合に、蓄電装置を充電する際の充電電圧を所望の電圧よりも低く制限することによって、蓄電装置の過充電を抑制しつつ、その蓄電装置から供給される負荷の作動を確保することができる。
このような蓄電装置には、各バッテリセルに電流遮断装置(以下、CID「Current Interrupt Device」とも称する。)を備えるものが存在する。このCIDは、バッテリセルに異常が発生してバッテリセルの内圧が規定値を超えた場合に、その内圧によって作動して、蓄電装置の通電経路をハード的に遮断する構成を一般的に有する。そのため、CIDが作動することによって蓄電装置の過電圧が防止される。
しかしながら、CIDが作動したか否かが直接的に検出できない場合があり、たとえば、ハイブリッド車両などにおいて、CIDが作動したまま車両の走行を継続させると、CIDに大きな電圧が印加されてバッテリセル内部でのスパークの発生などの原因となり、二次的な故障を誘発するおそれがある。したがって、CIDが作動したことを速やかに検出することが必要となる。
一方で、近年、ハイブリッド自動車や電気自動車などの用途においては、蓄電装置からの電力でより長い距離を走行することが求められており、蓄電装置の容量を増加することがさらに必要とされている。そのために、蓄電装置には、並列に接続された複数の電池パックを有するものがある。このような場合に、これらの電池パックのうちの1つにおいてCIDが作動した場合、CIDが作動していない電池パックから負荷へは継続して電圧が印加されるので、負荷への入力電圧を監視するのみでは、CIDの作動を検出することができない場合がある。
本発明は、このような課題を解決するためになされたものであって、その目的は、各々がCIDを含む複数の電池パックが並列に設けられた構成を有する蓄電装置を備えたシステムにおいて、CIDの作動を精度よく検出することである。
本発明による蓄電装置の制御装置は、設定部と、演算部と、判定部とを備え、負荷装置に駆動電力を供給するための蓄電装置を制御する。蓄電装置は、負荷装置に対して並列に設けられた第1の電池パックおよび第2の電池パックを含む。第1および第2の電池パックの各々は、電池パックの内圧が規定値を超えた場合に作動して、電池パックの通電経路を遮断するように構成された遮断装置を有する。設定部は、予め定められたタイミングにおける、第1の電池パックの出力電圧と蓄電装置から負荷装置への入力電圧との第1の偏差、および、第2の電池パックの出力電圧と入力電圧との第2の偏差を、第1および第2の基準偏差としてそれぞれ設定する。演算部は、上記タイミングより後において、第1の偏差と第1の基準偏差との第1の差分値、および第2の偏差と第2の基準偏差との第2の差分値を演算する。判定部は、第1の差分値の大きさが予め定められた第1のしきい値を上回り、かつ第2の差分値の大きさが第1のしきい値以上の予め定められた第2のしきい値を下回る場合は、第2の電池パックに対応する遮断装置が作動したと判定する。
好ましくは、制御装置は、判定部によって、遮断装置が作動したと判定された電池パックの正極端と負荷装置の正極端とに接続される切換装置を動作させて、当該電池パックから負荷装置へ供給される電力を遮断するための制御部をさらに備える。
好ましくは、設定部は、上記タイミングにおける、第1の電池パックの出力電圧と第2の電池パックの出力電圧との第3の偏差を、第3の基準偏差としてさらに設定する。演算部は、タイミングより後において、第3の偏差と第3の基準偏差との第3の差分値をさらに演算する。そして、制御部は、第3の差分値の大きさが、予め定められた基準値を上回る場合は、第1および第2の電池パックの切換装置の両方を動作させて、第1および第2の電池パックから負荷装置へ供給される電力を遮断する。
好ましくは、負荷装置の入力端子間には、蓄電装置と並列に接続されたコンデンサが設けられる。
好ましくは、上記タイミングは、第1および第2の電池パックの正極端と負荷装置の正極端との間にそれぞれ接続される第1および第2の切換装置の両方が導通状態とされ、かつ負荷装置の正極端と負極端との間に接続されたコンデンサのプリチャージが完了したタイミングである。
本発明による車両は、蓄電装置と、蓄電装置からの電力を用いて車両の駆動力を発生するように構成された駆動装置を含む負荷装置と、蓄電装置を制御するための制御装置とを備える。蓄電装置は、負荷装置に対して並列に接続された第1の電池パックおよび第2の電池パックを含む。第1および第2の電池パックの各々は、電池パックの内圧が規定値を超えた場合に作動して、電池パックの通電経路を遮断するように構成された遮断装置を有する。制御装置は、設定部と、演算部と、判定部とを含む。設定部は、予め定められたタイミングにおける、第1の電池パックの出力電圧と蓄電装置から負荷装置への入力電圧との第1の偏差および第2の電池パックの出力電圧と入力電圧との第2の偏差を、第1および第2の基準偏差としてそれぞれ設定する。演算部は、上記タイミングより後において、第1の偏差と第1の基準偏差との第1の差分値、および第2の偏差と第2の基準偏差との第2の差分値を演算する。判定部は、第1の差分値の大きさが予め定められた第1のしきい値を上回り、かつ第2の差分値の大きさが第1のしきい値以上の予め定められた第2のしきい値を下回る場合は、第2の電池パックに対応する遮断装置が作動したと判定する。
本発明による蓄電装置の制御方法は、負荷装置に駆動電力を供給するための蓄電装置についての制御方法である。蓄電装置は、負荷装置に対して並列に接続された第1の電池パックおよび第2の電池パックを含む。第1および第2の電池パックの各々は、電池パックの内圧が規定値を超えた場合に作動して、電池パックの通電経路を遮断するように構成された遮断装置を有する。制御方法は、予め定められたタイミングにおける第1の電池パックの出力電圧と蓄電装置から負荷装置への入力電圧との第1の偏差を第1の基準偏差として設定するステップと、タイミングにおける第2の電池パックの出力電圧と入力電圧との第2の偏差を第2の基準偏差として設定するステップと、上記タイミングより後において第1の偏差と第1の基準偏差との第1の差分値を演算するステップと、上記タイミングより後において第2の偏差と第2の基準偏差との第2の差分値を演算するステップと、第1の差分値の大きさが予め定められた第1のしきい値を上回りかつ第2の差分値の大きさが第1のしきい値以上の予め定められた第2のしきい値を下回る場合は、第2の電池パックに対応する遮断装置が作動したと判定するステップとを備える。
本発明によれば、各々がCIDを含む複数の電池パックが並列に設けられた構成を有する蓄電装置を備えたシステムにおいて、CIDの作動を精度よく検出することができる。
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰り返さない。
図1は、本実施の形態に従う車両100を示す全体ブロック図である。
図1を参照して、車両100は、蓄電装置110と、システムメインリレー(System Main Relay:SMR)115と、負荷装置200と、制御装置であるECU(Electronic Control Unit)300と、コンデンサC1とを備える。負荷装置200は、駆動装置120と、補機装置170とを含む。
図1を参照して、車両100は、蓄電装置110と、システムメインリレー(System Main Relay:SMR)115と、負荷装置200と、制御装置であるECU(Electronic Control Unit)300と、コンデンサC1とを備える。負荷装置200は、駆動装置120と、補機装置170とを含む。
駆動装置120は、コンバータ121と、インバータ122,123と、モータジェネレータ130,135と、動力伝達ギヤ140と、駆動輪150と、内燃機関であるエンジン160と、コンデンサC2とを含む。
蓄電装置110は、充放電可能に構成された電力貯蔵要素である。蓄電装置110は、電池パックBP1,BP2と、電圧センサ111,112とを含む。電池パックBP1,BP2は、たとえば、リチウムイオン電池、ニッケル水素電池または鉛蓄電池などの二次電池、あるいは電気二重層キャパシタなどの蓄電素子を含んで構成される。
蓄電装置110は、負荷装置200の正極端に接続される電力線PL1、および、負荷装置200の負極端に接続される接地線NL1を介して負荷装置200に接続される。そして、蓄電装置110は、車両100の駆動力を発生させるための電力を駆動装置120に供給する。また、蓄電装置110は、モータジェネレータ130、135で発電された電力を蓄電する。蓄電装置110の出力はたとえば200V程度である。
電圧センサ111,112は、電池パックBP1,BP2の電圧VB1,VB2をそれぞれ検出し、検出信号をECU300へ出力する。
SMR115は、複数のリレーSMR−1,SMR−2,SMR−3,SMR−Gを含む。SMR−1の一方端は電池パックBP1の正極端子に接続され、他方端は電力線PL1に接続される。SMR−2の一方端は電池パックBP2の正極端子に接続され、他方端は電力線PL1に接続される。SMR−Gの一方端は、電池パックBP1,BP2の負極端子同士の接続ノードNDに接続され、他方端は接地線NL1に接続される。直列接続されたSMR−3および抵抗R1は、SMR−Gに並列に接続される。SMR−3は、蓄電装置110から負荷装置200への電力供給開始時の突入電流の低減、あるいは電力遮断時のSMR−Gの溶着防止のためのリレーである。SMR115に含まれるこれらのリレーは、ECU300からの制御信号SE1〜SE4に基づいて制御され、蓄電装置110と負荷装置200との間での電力の供給と遮断とを切換える。
コンバータ121は、ECU300からの制御信号PWCに基づいて、電力線PL1および接地線NL1と電力線PL2および接地線NL1との間で電圧変換を行なう。
インバータ122,123は、電力線PL2および接地線NL1に並列に接続される。インバータ122,123は、ECU300からの制御信号PWI1,PWI2にそれぞれ基づいて、コンバータ121から供給される直流電力を交流電力に変換し、モータジェネレータ130,135をそれぞれ駆動する。
コンデンサC1は、電力線PL1および接地線NL1の間に設けられ、電力線PL1および接地線NL1間の電圧変動を減少させる。また、コンデンサC2は、電力線PL2および接地線NL1の間に設けられ、電力線PL2および接地線NL1間の電圧変動を減少させる。
電圧センサ124は、コンデンサC1の両端にかかる電圧、すなわち負荷装置200への入力電圧VLを検出し、その検出値をECU300へ出力する。電圧センサ125は、コンデンサC2の両端にかかる電圧VHを検出し、その検出値をECU300へ出力する。
モータジェネレータ130,135は交流回転電機であり、たとえば、永久磁石が埋設されたロータを備える永久磁石型同期電動機である。
モータジェネレータ130,135の出力トルクは、減速機や動力分割機構を含んで構成される動力伝達ギヤ140を介して駆動輪150に伝達されて、車両100を走行させる。モータジェネレータ130,135は、車両100の回生制動動作時には、駆動輪150の回転力によって発電することができる。そして、その発電電力は、コンバータ121およびインバータ122,123によって蓄電装置110の充電電力に変換される。
また、モータジェネレータ130,135は動力伝達ギヤ140を介してエンジン160とも結合される。そして、ECU300により、モータジェネレータ130,135およびエンジン160が協調的に動作されて必要な車両駆動力が発生される。さらに、モータジェネレータ130,135は、エンジン160の回転により発電が可能であり、この発電電力を用いて蓄電装置110を充電することができる。なお、本実施の形態においては、モータジェネレータ135を専ら駆動輪150を駆動するための電動機として用い、モータジェネレータ130を専らエンジン160により駆動される発電機として用いるものとする。
また、図1においては、モータジェネレータが2つ設けられる構成が例として示されるが、モータジェネレータの数はこれに限定されず、モータジェネレータが1つの場合、あるいは2つより多くのモータジェネレータを設ける構成としてもよい。また、エンジン160は必須の構成ではなく、エンジン160を含まない、電気自動車や燃料電池車であってもよい。さらに、蓄電装置110に接続される負荷は上記のような車両には限られず、蓄電装置110から出力される電力で駆動される電気機器であれば、本実施の形態が適用可能である。
負荷装置200は、低電圧系(補機系)の構成として補機装置170を含む。補機装置170としては、いずれも図示しないが、DC/DCコンバータ、補機負荷、補機バッテリや、空調機であるエアコンなどが含まれる。
ECU300は、いずれも図1には図示しないがCPU(Central Processing Unit)、記憶装置および入出力バッファを含み、各センサ等からの信号の入力や各機器への制御信号の出力を行なうとともに、車両100および各機器の制御を行なう。なお、これらの制御については、ソフトウェアによる処理に限られず、専用のハードウェア(電子回路)で処理することも可能である。
ECU300は、蓄電装置110に備えられる電圧センサ111,112からの電圧VB1,VB2および図示しない電流センサからの電流検出値に基づいて、蓄電装置110の充電状態SOC(State of Charge)を演算する。
なお、蓄電装置110は、図2で後述するように、複数のバッテリセルを直列に接続することによって所望の電圧が出力されるように構成されるが、電圧センサ111によって検出される電圧VBは、蓄電装置110の両端の電圧ではなく、一般的に、個々のバッテリセルの電圧の和に基づいて算出される。そのため、CIDが作動しても電圧VBの出力は必ずしもゼロとならない。
ECU300は、駆動装置120、SMR115などを制御するための制御信号を生成して出力する。なお、図1においては、ECU300として1つの制御装置を設ける構成としているが、たとえば、駆動装置120用の制御装置や蓄電装置110用の制御装置などのように、機能ごとまたは制御対象機器ごとに個別の制御装置を設ける構成としてもよい。
図2は、蓄電装置110の詳細な構成を示す図である。図2を参照して、蓄電装置110に含まれる電池パックBP1は、直列に接続された複数のバッテリセルCL11〜CL1n(以下、総称してCL1とも称する。)を含んで構成され、バッテリセルCL1の個数により所望の出力電圧が得られる。この各バッテリセルCL1には、電流遮断装置CIDが設けられる。また、電池パックBP2についても同様に、直列に接続されたCIDを含む複数のバッテリセルCL21〜CL2n(以下、総称してCL2とも称する。)が含まれる。
CIDは、バッテリセルの電解液から発生するガスによって、バッテリセルの内圧が規定値を上回った場合に、その内圧によって作動して、当該バッテリセルを同一電池パック内の他のバッテリセルから物理的に遮断する。したがって、バッテリセルのいずれかのCIDが作動すると、CIDが作動した電池パックには電流が流れなくなる。
このようにCIDが作動して電流が遮断されると、CIDが作動したバッテリセル以外のバッテリセルの合計電圧と、当該電池パックに印加される電圧(他方の電池パックからの電圧および負荷装置200の入力電圧VL)との差電圧が、作動したCIDに印加されることが知られている。したがって、CIDが作動した電池パックのリレー(図1における、SMR−1,SMR2)が導通したままの状態において、たとえば駆動装置120や補機装置170による電力消費により、他方の電池パックの電圧および電圧VLが低下すると、それに伴って作動したCIDに印加される電圧が増加する。CIDによって遮断された部分の間隙は比較的小さいため、CIDに印加される電圧が所定の耐電圧を上回ると、たとえば、上記の間隙においてスパークが発生するなどして、二次的な故障が誘発されるおそれがある。したがって、CIDの作動を速やかに検出することが必要となるが、一般的に、バッテリセルにおいては、CIDが作動したことを出力するための手段を有しない場合がある。
特に、図1に示すような複数の電池パックBP1,BP2が負荷装置200に対して並列に設けられた構成では、いずれか一方の電池パックのCIDが作動したとしても、正常な電池パックからの電圧が負荷装置200に印加されてしまう。そうすると、CIDが作動した電池パックがあったとしても、負荷装置200の入力端においては、CIDの作動に伴う変化を検出することができず、CIDの作動検出が遅れ、結果としてCIDの作動に伴う二次的な故障が発生するおそれがある。
このような問題に鑑み、本実施の形態においては、所定のタイミングにおいて蓄電装置110の電池パックBP1,BP2のそれぞれの出力電圧VB1,VB2と負荷装置200の入力電圧VLとの偏差を、それぞれ第1および第2の基準偏差として記憶し、その所定のタイミング以降の電圧VB1,VB2と電圧VLとのそれぞれの偏差と、上記基準偏差との差分値に基づいて、電池パックBP1,BP2のどちらのCIDが作動したかを検出するCIDの作動検出制御を行なう。このようにすることによって、複数の電池パックが並列に設けられた構成を有する蓄電装置においても、精度良くCIDが作動したことを検出することが可能となる。
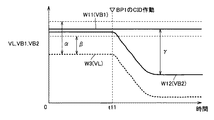
図3は、本実施の形態における、CIDの作動検出制御の概要を説明するための図である。図3は、横軸に時間が示され、縦軸にはリレーSMR−1,SMR−2の動作状態、電圧VB1,VB2,VLの変化状態、電圧VLと電圧VB1との偏差ΔVLB1(=|VL−VB1|)の変化状態、電圧VLと電圧VB2との偏差ΔVLB2(=|VL−VB2|)の変化状態、および電圧VB1と電圧VB2との偏差ΔVB12(=|VB1−VB2|)の変化状態が示される。
図1および図3を参照して、時刻t1において、イグニッションスイッチが操作されてSMR115がオンに制御されると、リレーSMR−1,SMR−2がオン状態(導通状態)となる。これによって、電池パックBP1,BP2からの電圧が負荷装置200に印加される。
このとき、たとえば、電池パックBP1,BP2の回路開放時の電圧がVB10,VB20(VB10>VB20)であり、出力電圧に多少の差がある場合には、電池パックBP1と電池パックBP2との間で循環電流が流れることによって、電圧センサ111,112によって検出される電圧がほぼ同じとなるように均等化される(図3中の曲線W1,W2)。また、これによって、コンデンサC1の初期充電が実行され、電圧VLの値が電圧VB1,VB2とほぼ同じ値まで上昇する(図3中の曲線W3)。なお、図3においては、理解を容易にするために、電圧センサ111,112,124による電圧VB1,VB2,VLの出力値に若干のオフセットを有する場合が示されている。
そして、電池パックBP1,BP2の出力電力が均等化され、かつコンデンサC1の初期充電が完了する時刻t2において、そのときの電圧VL,VB1,VB2間の各電圧偏差ΔVLB1,ΔVLB2,ΔVB12が、基準偏差ΔV1ref,ΔV2ref,ΔV12refとして記憶される。
その後、時刻t2から負荷装置200が駆動されることによって、電池パックBP1,BP2の充放電が実行され、それに伴って電圧VB1,VB2が変動しながら減少する。時刻t2からt3までは、電池パックBP1,BP2のCIDは動作していないので、このときの電圧偏差ΔVLB1,ΔVLB2,ΔVB12は、時刻t1で記憶した基準偏差ΔV1ref,ΔV2ref,ΔV12refとほぼ同じ値となる。
そして、時刻t3において、電池パックBP1のCIDが作動すると、電池パックBP1に電流が流れなくなり、電池パックBP1からの電力の供給が停止する。そのため、時刻t3以降は、電圧VB1は変化しない。
一方で、電池パックBP2のCIDは作動していないので、負荷装置200には電池パックBP2からの電力が継続して供給され、それに伴って電圧VB2および電圧VLが継続して減少する。
これによって、電圧VLと電圧VB1との電圧偏差ΔVLB1、および電圧VB1と電圧VB2との電圧偏差ΔVB12が増加する。そして、電圧偏差ΔVLB1と基準偏差ΔV1refとの差分値がしきい値α以上で、かつ電圧VLB2と基準偏差ΔV2refとの差分値がしきい値β(α≧β)より小さくなる条件が成立すると、電池パックBP1においてCIDが作動していると判断される。これによって、リレーSMR−1がオフ(非導通)にされ、電池パックBP1が負荷装置200から切り離される。
なお、図3には示さないが、電池パックBP2のCIDが作動した場合には、電圧VLと電圧VB1との電圧偏差ΔVLB1はほとんど変動せず、その代わりに、電圧VLと電圧VB2との電圧偏差ΔVLB2が増加する。そして、電圧偏差ΔVLB1と基準偏差ΔV1refとの差分値がしきい値βより小さく、かつ電圧VLB2と基準偏差ΔV2refとの差分値がしきい値α以上となる条件が成立すると、電池パックBP2においてCIDが作動していると判断され、リレーSMR−2がオフにされる。
このように、電圧偏差ΔVLB1,ΔVLB2について、それぞれの基準偏差ΔV1ref,ΔV2refとの差分値を、予め定められたしきい値と比較することによって、並列接続された電池パックBP1,BP2のどちらのCIDが作動したかを判断することができる。そして、CIDが作動した電池パックのみを負荷装置200から切り離すことで、負荷装置の運転を継続しつつ、CIDが作動した電池パックの二次的な故障を防止することが可能となる。
なお、上述のしきい値α,βの値を適切に設定することにより、CIDの作動を判断する際に、適当な不感帯を設けることができる。これによって、たとえば、蓄電装置と負荷装置との間の充放電の急激な変化が生じた場合などの過渡状態における誤判定を抑制することが可能となる。
ところで、上記のように、CIDが作動した電池パックを特定することが必ずしもできない場合がある。たとえば、図4に示すように、基準偏差を設定後に、電圧VLの検出値と電圧VB1,VB2の検出値とのオフセットが大きくなってしまったような場合にCIDが作動すると、上記のような、一方の電池パックのみについて、電圧偏差と基準偏差との差分値が大きくなるような条件には該当しなくなる場合がある。そうすると、CIDが作動した電池パックを特定することができない。
そのため、本実施の形態においては、さらに、電圧VB1,VB2間の電圧偏差ΔVB12が対応する基準偏差ΔV12refと比較され、これらの差分値がしきい値γを上回った場合には、どちらかは特定できないが電池パックBP1,BP2のいずれか一方のCIDが作動していることを検出することができる。
図5は、本実施の形態において、ECU300で実行されるCIDの作動検出制御を説明するための機能ブロック図である。図5の機能ブロック図に記載された各機能ブロックは、ECU300によるハードウェア的あるいはソフトウェア的な処理によって実現される。
図1および図5を参照して、ECU300は、基準値設定部310と、偏差演算部320と、判定部330と、リレー制御部340とを含む。
基準値設定部310は、電圧センサ111,112からの電池パックBP1,BP2の電圧VB1,VB2、および電圧センサ124からの電圧VLの入力を受ける。また、基準値設定部310は、SMR115に含まれるリレーSMR−1,SMR−2,SMR−3,SMR−Gに対するそれぞれの制御信号SE1〜SE4を受ける。
基準値設定部310は、SMR115におけるSMR−1,SMR−2,SMR−Gが閉成されることによって、電池パックBP1,BP2の電圧VB1,VB2が均等化され、かつコンデンサC1のプリチャージが完了したタイミングにおいて、電池パックBP1,BP2の電圧VB1,VB2と電圧VLとのそれぞれの偏差ΔV1ref,ΔV2ref、および電池パックBP1,BP2の電圧VB1,VB2の偏差ΔV12refを基準偏差として設定する。そして、基準値設定部310は、設定したこれらの基準偏差を、判定部330へ出力する。
偏差演算部320は、電圧VB1,VB2および電圧VLの入力を受ける。偏差演算部320は、電池パックBP1,BP2の電圧VB1,VB2と電圧VLとのそれぞれの偏差ΔVLB1,ΔVLB2、および電池パックBP1,BP2の電圧VB1,VB2の偏差ΔVB12を演算する。そして、これらの演算結果を判定部330へ出力する。
判定部330は、基準値設定部310からの基準偏差ΔV1ref,ΔV2ref,ΔV12ref、および偏差演算部320からの偏差ΔVLB1,ΔVLB2,ΔVB12を受ける。判定部330は、各基準偏差およびそれに対応する偏差の差分値を、図3で説明したようなしきい値と比較することによって、電池パックのCIDが作動したか否か、および、いずれの電池パックのCIDが作動したかを判定する。そして、その判定結果である判定フラグFLGをリレー制御部340へ出力する。
リレー制御部340は、判定部330からの判定フラグFLGを受ける。そして、リレー制御部340は、判定フラグFLGに基づいて、リレーSMR−1,SMR−2のうち、CIDが作動した電池パックに対応するリレーを開放するように制御信号SE1,SE2を生成する。これによって、CIDが作動した電池パックを負荷装置200から切り離すとともに、正常な電池パックを使用して負荷装置200を継続的に駆動することができる。
また、リレー制御部340は、図4で説明したように、いずれかの電池パックのCIDが作動しているが、どちらのCIDが作動しているかが不明である場合は、両方の電池パックBP1,BP2を負荷装置200から切り離すために、リレーSMR−1,SMR−2の両方を開放するように制御信号SE1,SE2を生成する。
なお、図5には示さないが、ECU300は、判定部330によって電池パックBP1,BP2の少なくとも一方のCIDが作動したことが判定されたことに基づいて、警報装置(図示せず)によってユーザに対して視覚的および/または聴覚的にCIDの作動を通知するようにしてもよい。
図6は、本実施の形態において、ECU300で実行されるCIDの作動検出制御処理の詳細を説明するためのフローチャートである。図6に示されるフローチャートは、ECU300に予め格納されたプログラムがメインルーチンから呼び出されて、所定周期で実行されることによって処理が実現される。あるいは、一部のステップについては、専用のハードウェア(電子回路)で処理を実現することも可能である。
図1および図6を参照して、ECU300は、ステップ(以下、ステップをSと略す。)100にて、SMR115内の各リレーが接続されてから一定時間が経過したか否かを判定する。
SMR115が接続されてから一定時間が経過していない場合(S100にてNO)は、処理がS160に進められ、ECU300は、電池パックBP1,BP2の電圧VB1,VB2と電圧VLとのそれぞれの偏差ΔV1ref,ΔV2ref、および電池パックBP1,BP2の電圧VB1,VB2の偏差ΔV12refを基準偏差として設定する。その後、処理がメインルーチンに戻される。
SMR115が接続されてから一定時間が経過した場合(S100にてYES)は、S110に処理が進められ、ECU300は、電圧VB1,VB2および電圧VLの入力を受ける。偏差演算部320は、電池パックBP1,BP2の電圧VB1,VB2と電圧VLとのそれぞれの偏差ΔVLB1,ΔVLB2、および電池パックBP1,BP2の電圧VB1,VB2の偏差ΔVB12を演算する。
次に、ECU300は、S210にて、基準偏差ΔV1refと偏差ΔVLB1との差分値の絶対値がしきい値α以上であり、かつ基準偏差ΔV2refと偏差ΔVLB2との差分値の絶対値がしきい値βより小さいか否か、すなわち電池パックBP1においてCIDが作動したか否かを判定する(α≧β)。
電池パックBP1においてCIDが作動したと判定した場合(S120にてYES)は、ECU300は、処理をS170に進めて、リレーSMR−1をオフ(非接続)として、電池パックBP1を負荷装置200から切り離す。
一方、電池パックBP1においてCIDが作動していないと判定した場合(S120にてNO)は、ECU300は、処理をS130に進めて、次に、基準偏差ΔV1refと偏差ΔVLB1との差分値の絶対値がしきい値βよりも小さく、かつ基準偏差ΔV2refと偏差ΔVLB2との差分値の絶対値がしきい値α以上であるか否か、すなわち電池パックBP2においてCIDが作動したか否かを判定する。
電池パックBP2においてCIDが作動したと判定した場合(S130にてYES)は、ECU300は、処理をS180に進めて、リレーSMR−2をオフとして、電池パックBP2を負荷装置200から切り離す。
一方、電池パックBP2においてCIDが作動していないと判定した場合(S130にてNO)は、ECU300は、処理をS140に進めて、次に、基準偏差ΔV12refと偏差ΔVB12との差分値の絶対値がしきい値γより大きいか否かを判定する。
基準偏差ΔV12refと偏差ΔVB12との差分値の絶対値がしきい値γより大きい場合(S140にてYES)は、ECU300は、図4において説明したように、電池パックの電圧VB1,VB2と電圧VLとの間のオフセットが大きいような場合に、電池パックBP1,BP2のいずれか一方でCIDが作動しているがいずれの電池パックであるかが特定できない状態であると判断する。そして、ECU300は、S150にて、緊急処理として、SMR115をオフとし、蓄電装置110の全体を負荷装置200から切り離す。このとき、図1のようなハイブリッド(HV)自動車の場合には、ECU300は、エンジン160のみによって走行するバッテリレス走行に切換えて走行を継続する。
また、エンジンを搭載していない電気自動車(EV)の場合には、蓄電装置が負荷装置から切り離されることによって緊急停止が行なわれる。なお、走行中に緊急停止することは危険である場合があるので、ユーザによる退避走行が完了した後に緊急停止することが好ましい。
一方、基準偏差ΔV12refと偏差ΔVB12との差分値の絶対値がしきい値γ以下の場合(S140にてNO)は、ECU300は、電池パックBP1,BP2のいずれにおいてもCIDが作動していないと判断して、処理をメインルーチンに戻す。
このような処理に従って制御を行なうことによって、各々がCIDを含む複数の電池パックが並列に接続された構成を有する蓄電装置を備えたシステムにおいて、CIDの作動を精度よく検出することが可能となる。これによって、CIDが作動したことを迅速に検出することができるので、CIDが作動した場合の二次的な故障の発生を防止することが可能となる。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
100 車両、110 蓄電装置、115 SMR、111,112、124,125 電圧センサ、120 駆動装置、121 コンバータ、122,123 インバータ、130,135 モータジェネレータ、140 動力伝達ギヤ、150 駆動輪、160 エンジン、170 補機装置、200 負荷装置、300 ECU、310 基準値設定部、320 偏差演算部、330 判定部、340 リレー制御部、BP1,BP2 電池パック、C1,C2 コンデンサ、CID 電流遮断装置、CL1,CL2,CL11〜CL1n,CL21〜CL2n バッテリセル、ND 接続ノード、NL1 接地線、PL1,PL2 電力線、R1 抵抗、SMR−1〜SMR−3,SMR−G リレー。
Claims (7)
- 負荷装置に駆動電力を供給するための蓄電装置についての制御装置であって、
前記蓄電装置は、前記負荷装置に対して並列に設けられた第1の電池パックおよび第2の電池パックを含み、
前記第1および第2の電池パックの各々は、電池パックの内圧が規定値を超えた場合に作動して、電池パックの通電経路を遮断するように構成された遮断装置を有し、
前記制御装置は、
予め定められたタイミングにおける、前記第1の電池パックの出力電圧と前記蓄電装置から前記負荷装置への入力電圧との第1の偏差、および、前記第2の電池パックの出力電圧と前記入力電圧との第2の偏差を、第1および第2の基準偏差としてそれぞれ設定するための設定部と、
前記タイミングより後において、前記第1の偏差と前記第1の基準偏差との第1の差分値、および前記第2の偏差と前記第2の基準偏差との第2の差分値を演算するための演算部と、
前記第1の差分値の大きさが予め定められた第1のしきい値を上回り、かつ前記第2の差分値の大きさが前記第1のしきい値以上の予め定められた第2のしきい値を下回る場合は、前記第2の電池パックに対応する遮断装置が作動したと判定するように構成された判定部とを備える、蓄電装置の制御装置。 - 前記判定部によって、前記遮断装置が作動したと判定された電池パックの正極端と前記負荷装置の正極端とに接続される切換装置を動作させて、当該電池パックから前記負荷装置へ供給される電力を遮断するための制御部をさらに備える、請求項1に記載の蓄電装置の制御装置。
- 前記設定部は、前記タイミングにおける、前記第1の電池パックの出力電圧と前記第2の電池パックの出力電圧との第3の偏差を、第3の基準偏差としてさらに設定し、
前記演算部は、前記タイミングより後において、前記第3の偏差と前記第3の基準偏差との第3の差分値をさらに演算し、
前記制御部は、前記第3の差分値の大きさが、予め定められた基準値を上回る場合は、前記第1および第2の電池パックの切換装置の両方を動作させて、前記第1および第2の電池パックから前記負荷装置へ供給される電力を遮断する、請求項2に記載の蓄電装置の制御装置。 - 前記負荷装置の入力端子間には、前記蓄電装置と並列に接続されたコンデンサが設けられる、請求項1〜3のいずれか1項に記載の蓄電装置の制御装置。
- 前記タイミングは、前記第1および第2の電池パックの正極端と前記負荷装置の正極端との間にそれぞれ接続される第1および第2の切換装置の両方が導通状態とされ、かつ前記負荷装置の正極端と負極端との間に接続されたコンデンサのプリチャージが完了したタイミングである、請求項1に記載の蓄電装置の制御装置。
- 車両であって、
蓄電装置と、
前記蓄電装置からの電力を用いて前記車両の駆動力を発生するように構成された駆動装置を含む負荷装置と、
前記蓄電装置を制御するための制御装置とを備え、
前記蓄電装置は、前記負荷装置に対して並列に接続された第1の電池パックおよび第2の電池パックを含み、
前記第1および第2の電池パックの各々は、電池パックの内圧が規定値を超えた場合に作動して、電池パックの通電経路を遮断するように構成された遮断装置を有し、
前記制御装置は、
予め定められたタイミングにおける、前記第1の電池パックの出力電圧と前記蓄電装置から前記負荷装置への入力電圧との第1の偏差および前記第2の電池パックの出力電圧と前記入力電圧との第2の偏差を、第1および第2の基準偏差としてそれぞれ設定するための設定部と、
前記タイミングより後において、前記第1の偏差と前記第1の基準偏差との第1の差分値、および前記第2の偏差と前記第2の基準偏差との第2の差分値を演算するための演算部と、
前記第1の差分値の大きさが予め定められた第1のしきい値を上回り、かつ前記第2の差分値の大きさが前記第1のしきい値以上の予め定められた第2のしきい値を下回る場合は、前記第2の電池パックに対応する遮断装置が作動したと判定するように構成された判定部とを含む、車両。 - 負荷装置に駆動電力を供給するための蓄電装置についての制御方法であって、
前記蓄電装置は、前記負荷装置に対して並列に接続された第1の電池パックおよび第2の電池パックを含み、
前記第1および第2の電池パックの各々は、電池パックの内圧が規定値を超えた場合に作動して、電池パックの通電経路を遮断するように構成された遮断装置を有し、
前記制御方法は、
予め定められたタイミングにおける前記第1の電池パックの出力電圧と前記蓄電装置から前記負荷装置への入力電圧との第1の偏差を第1の基準偏差として設定するステップと、
前記タイミングにおける前記第2の電池パックの出力電圧と前記入力電圧との第2の偏差を、第2の基準偏差として設定するステップと、
前記タイミングより後において前記第1の偏差と前記第1の基準偏差との第1の差分値を演算するステップと、
前記タイミングより後において前記第2の偏差と前記第2の基準偏差との第2の差分値を演算するステップと、
前記第1の差分値の大きさが予め定められた第1のしきい値を上回り、かつ前記第2の差分値の大きさが前記第1のしきい値以上の予め定められた第2のしきい値を下回る場合は、前記第2の電池パックに対応する遮断装置が作動したと判定するステップとを備える、蓄電装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010258561A JP2012110175A (ja) | 2010-11-19 | 2010-11-19 | 蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010258561A JP2012110175A (ja) | 2010-11-19 | 2010-11-19 | 蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012110175A true JP2012110175A (ja) | 2012-06-07 |
Family
ID=46495148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010258561A Withdrawn JP2012110175A (ja) | 2010-11-19 | 2010-11-19 | 蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012110175A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103847505A (zh) * | 2012-11-30 | 2014-06-11 | 麦格纳斯太尔电池系统两合公司 | 用于交通工具的安全装置及用于控制其的方法 |
| JP2014225936A (ja) * | 2013-05-15 | 2014-12-04 | 三菱電機株式会社 | 車両用発電電動機 |
| WO2015040471A1 (en) | 2013-09-19 | 2015-03-26 | Toyota Jidosha Kabushiki Kaisha | Secondary battery |
| JP2019168374A (ja) * | 2018-03-26 | 2019-10-03 | 株式会社ケーヒン | 電圧検出装置 |
| CN110303943A (zh) * | 2019-08-01 | 2019-10-08 | 中车资阳机车有限公司 | 纯电动轨道机车双支路动力电池高压并联系统及控制方法 |
-
2010
- 2010-11-19 JP JP2010258561A patent/JP2012110175A/ja not_active Withdrawn
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103847505A (zh) * | 2012-11-30 | 2014-06-11 | 麦格纳斯太尔电池系统两合公司 | 用于交通工具的安全装置及用于控制其的方法 |
| CN103847505B (zh) * | 2012-11-30 | 2017-03-01 | 三星Sdi株式会社 | 用于交通工具的安全装置及用于控制其的方法 |
| US9634362B2 (en) | 2012-11-30 | 2017-04-25 | Samsung Sdi Co., Ltd. | Safety device for a vehicle and method for controlling the same |
| JP2014225936A (ja) * | 2013-05-15 | 2014-12-04 | 三菱電機株式会社 | 車両用発電電動機 |
| WO2015040471A1 (en) | 2013-09-19 | 2015-03-26 | Toyota Jidosha Kabushiki Kaisha | Secondary battery |
| US10707543B2 (en) | 2013-09-19 | 2020-07-07 | Toyota Jidosha Kabushiki Kaisha | Secondary battery |
| JP2019168374A (ja) * | 2018-03-26 | 2019-10-03 | 株式会社ケーヒン | 電圧検出装置 |
| JP7042128B2 (ja) | 2018-03-26 | 2022-03-25 | 日立Astemo株式会社 | 電圧検出装置 |
| CN110303943A (zh) * | 2019-08-01 | 2019-10-08 | 中车资阳机车有限公司 | 纯电动轨道机车双支路动力电池高压并联系统及控制方法 |
| CN110303943B (zh) * | 2019-08-01 | 2024-01-30 | 中车资阳机车有限公司 | 纯电动轨道机车双支路动力电池高压并联系统控制方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9929674B2 (en) | Power supply system for vehicle | |
| KR101863737B1 (ko) | 축전 시스템 | |
| JP5575506B2 (ja) | 車両用電源装置及びこの電源装置を備える車両 | |
| JP5621915B2 (ja) | 電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法 | |
| US8963457B2 (en) | Electric storage system and control method of electric storage system | |
| JP5321695B2 (ja) | 車両 | |
| CN107428254B (zh) | 车辆的电源装置 | |
| JP5255086B2 (ja) | 電源装置及びその制御方法 | |
| KR20090102896A (ko) | 하이브리드 차량의 배터리 보호방법 | |
| JP2015095916A (ja) | 蓄電システム | |
| JP5477304B2 (ja) | 電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法 | |
| JP5691993B2 (ja) | 蓄電システム及び電流センサ異常を検出する方法 | |
| JP2017229132A (ja) | 車輌の電源装置、及び電源制御装置 | |
| JP2018176917A (ja) | 車両用電源装置 | |
| JP2011041386A (ja) | 車両および車両の制御方法 | |
| JP2012110175A (ja) | 蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 | |
| JP5556902B2 (ja) | 電源システムおよびそれを搭載する車両、ならびに蓄電装置の制御方法 | |
| JP2019187061A (ja) | 電力制御システム | |
| JP5630274B2 (ja) | 車両の制御装置 | |
| JP2012138278A (ja) | 電源装置の制御装置および電源装置の制御方法 | |
| JP2018098954A (ja) | 電動車両の制御装置 | |
| JP5741168B2 (ja) | 電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法 | |
| JP5699930B2 (ja) | 電源システムおよびそれを搭載する車両、ならびに電源システムの制御方法 | |
| JP5533535B2 (ja) | 電源システムおよびその制御方法 | |
| JP5561114B2 (ja) | 蓄電装置の制御装置およびそれを搭載する車両、ならびに蓄電装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140204 |