JP2010078513A - ワークの位置を求める画像処理装置 - Google Patents
ワークの位置を求める画像処理装置 Download PDFInfo
- Publication number
- JP2010078513A JP2010078513A JP2008248730A JP2008248730A JP2010078513A JP 2010078513 A JP2010078513 A JP 2010078513A JP 2008248730 A JP2008248730 A JP 2008248730A JP 2008248730 A JP2008248730 A JP 2008248730A JP 2010078513 A JP2010078513 A JP 2010078513A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- work
- recognized
- image processing
- predetermined part
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004364 calculation method Methods 0.000 claims description 11
- 238000006243 chemical reaction Methods 0.000 claims description 2
- 238000000465 moulding Methods 0.000 abstract 1
- 238000000034 method Methods 0.000 description 11
- 238000013500 data storage Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000005266 casting Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000003754 machining Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 2
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
Images




Landscapes
- Image Processing (AREA)
- Image Analysis (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
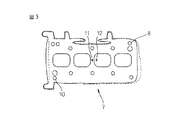
【解決手段】鋳物部品等の輪郭が不安定なワーク7をパターンマッチングで認識する場合、まずワーク7の輪郭を認識して、その結果を使ってワーク上の所定部位8及び10を探索する範囲やパラメータを調整する。調整された探索範囲やパラメータを使ってワーク上の所定部位を認識することで、同形の形状が複数存在した場合でもワークの誤認識を防ぐとともに、ワークの正確な位置姿勢を認識することができる。
【選択図】図2
Description
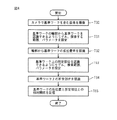
先ずステップTS0において、カメラを用いて基準ワークを含む画像を撮像する。次にステップTS1において、パターンマッチングにより、認識するモデルとして基準ワークの外形の輪郭を設定し、基準ワークを認識する際に探索する範囲と、認識するためのパラメータとを調整する。パラメータとして、角度やスケール、扁平率等が挙げられる。
2 カメラ
3 画像処理部
4 モニタ
5 データ格納部
6 ロボット
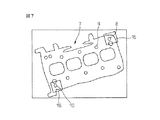
7 ワーク
8、9、10 部位
11、12 重心
13、14、15、16 探索範囲
Claims (5)
- ワークを捉えた対象画像に画像処理を行って前記ワークの位置を求める画像処理装置であって、
対象画像内において、パターンマッチングを用いてワークの輪郭からワークの位置を仮位置として認識する仮位置認識手段と、
前記仮位置認識手段が認識したワークの仮位置に基づいて、該ワーク上の所定部位を探索する範囲又はパラメータを調整して該ワーク上の所定部位の位置を認識する所定部位認識手段と、
前記仮位置と、前記所定部位認識手段が認識した所定部位の位置とからそれらの相対位置関係を求める相対位置計算手段と、
基準となるワークについて、前記相対位置計算手段が求めた前記相対位置関係を記憶する記憶手段と、
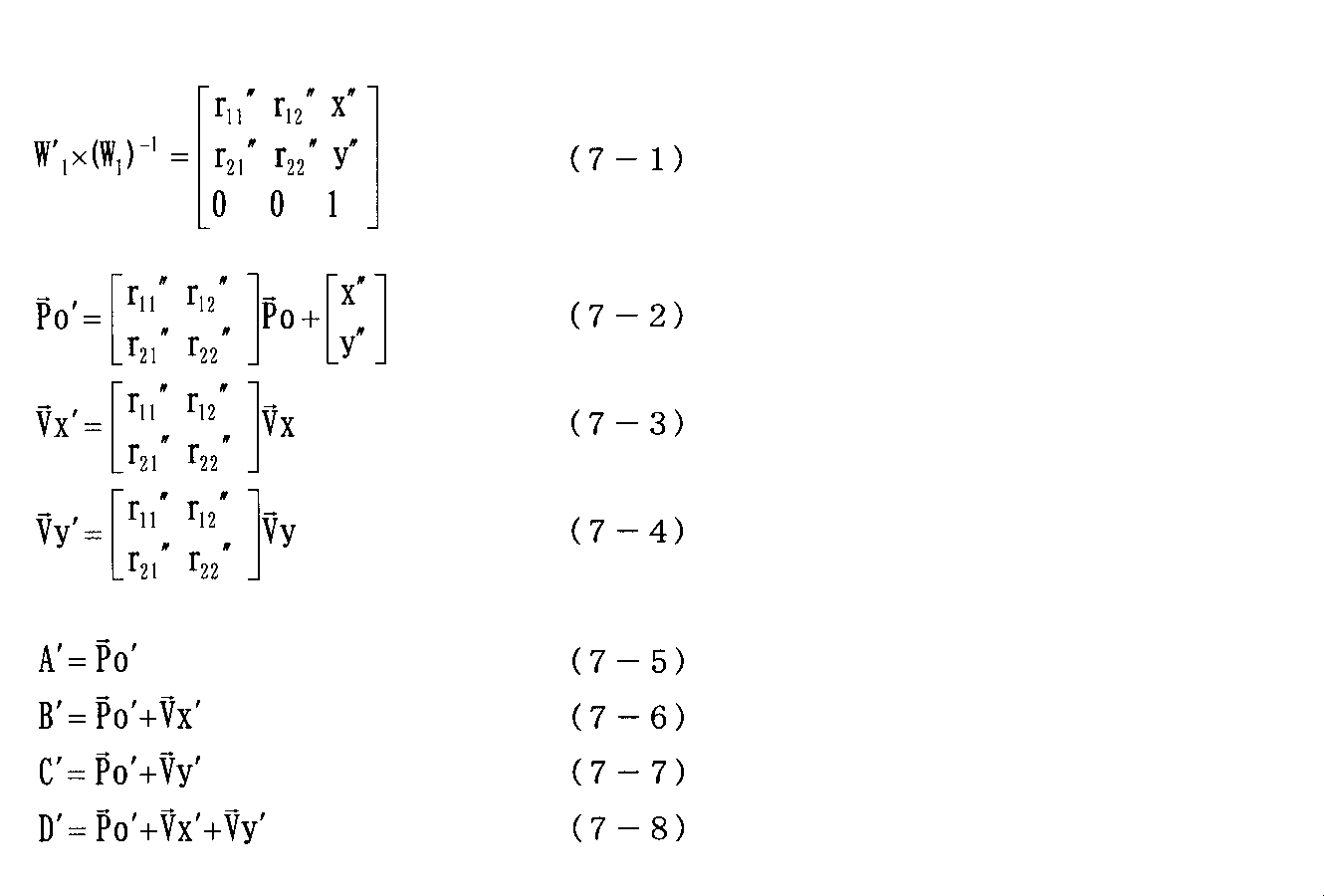
前記基準となるワークについて求めた相対位置関係と、認識対象ワークについて前記相対位置計算手段が求めた相対位置関係とに基づいて、前記認識対象ワークの輪郭から認識された仮位置を、該ワーク上の所定部位によって表現される本来の位置に変換するための調整量を求める調整量計算手段と、
前記調整量計算手段が求めた調整量を、前記認識対象ワークの仮位置に乗じることにより、前記認識対象ワークの位置姿勢を求める位置姿勢計算手段と、
を備えたことを特徴とする画像処理装置。 - 対象画像内において、パターンマッチングを用いてワークの輪郭から該ワークの位置及び角度、スケール、扁平率を認識する手段をさらに備え、
前記所定部位認識手段は、ワークを仮に認識した位置と、該ワークの角度、スケール及び扁平率の少なくとも1つとに基づいて、該ワーク上の所定部位を探索する範囲又はパラメータを調整して該ワーク上の所定部位の位置を認識する、請求項1に記載の画像処理装置。 - ワーク上の所定部位は1点以上であり、前記認識対象ワークの認識された位置に対する調整量が位置又は角度である、請求項1又は2に記載の画像処理装置。
- ワーク上の所定部位は2点以上であり、前記認識対象ワークの認識された位置に対する調整量が位置及び角度である、請求項1又は2に記載の画像処理装置。
- ワーク上の所定部位は3点以上であり、前記認識対象ワークの認識された位置に対する調整量が位置、角度、スケール及び扁平率である、請求項1又は2に記載の画像処理装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008248730A JP5123127B2 (ja) | 2008-09-26 | 2008-09-26 | ワークの位置を求める画像処理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008248730A JP5123127B2 (ja) | 2008-09-26 | 2008-09-26 | ワークの位置を求める画像処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010078513A true JP2010078513A (ja) | 2010-04-08 |
| JP5123127B2 JP5123127B2 (ja) | 2013-01-16 |
Family
ID=42209127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008248730A Active JP5123127B2 (ja) | 2008-09-26 | 2008-09-26 | ワークの位置を求める画像処理装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5123127B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113692215A (zh) * | 2021-07-30 | 2021-11-23 | 广州佳帆计算机有限公司 | 一种贴片元件位置可调整系统、方法及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0765175A (ja) * | 1993-08-31 | 1995-03-10 | Matsushita Electric Ind Co Ltd | 位置認識方法 |
| JPH07332945A (ja) * | 1994-06-08 | 1995-12-22 | Meidensha Corp | 物体位置検出装置 |
| JPH10288505A (ja) * | 1997-04-16 | 1998-10-27 | Komatsu Ltd | ワークの位置検出方法およびワークの外観検査方法およびこれらの装置 |
| JPH10339608A (ja) * | 1997-06-06 | 1998-12-22 | Meidensha Corp | 物体の位置姿勢検出装置、その検出方法及びこれを記憶する記録媒体 |
| JP2007172409A (ja) * | 2005-12-22 | 2007-07-05 | Matsushita Electric Works Ltd | 画像処理方法 |
-
2008
- 2008-09-26 JP JP2008248730A patent/JP5123127B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0765175A (ja) * | 1993-08-31 | 1995-03-10 | Matsushita Electric Ind Co Ltd | 位置認識方法 |
| JPH07332945A (ja) * | 1994-06-08 | 1995-12-22 | Meidensha Corp | 物体位置検出装置 |
| JPH10288505A (ja) * | 1997-04-16 | 1998-10-27 | Komatsu Ltd | ワークの位置検出方法およびワークの外観検査方法およびこれらの装置 |
| JPH10339608A (ja) * | 1997-06-06 | 1998-12-22 | Meidensha Corp | 物体の位置姿勢検出装置、その検出方法及びこれを記憶する記録媒体 |
| JP2007172409A (ja) * | 2005-12-22 | 2007-07-05 | Matsushita Electric Works Ltd | 画像処理方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113692215A (zh) * | 2021-07-30 | 2021-11-23 | 广州佳帆计算机有限公司 | 一种贴片元件位置可调整系统、方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5123127B2 (ja) | 2013-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111482959B (zh) | 机器人运动视觉系统的自动手眼标定系统与方法 | |
| CN108453701B (zh) | 控制机器人的方法、示教机器人的方法和机器人系统 | |
| EP1607194B1 (en) | Robot system comprising a plurality of robots provided with means for calibrating their relative position | |
| US10695910B2 (en) | Automatic calibration method for robot system | |
| JP4021413B2 (ja) | 計測装置 | |
| CN108921890B (zh) | 螺丝锁付方法、装置及计算机可读存储介质 | |
| US10675759B2 (en) | Interference region setting apparatus for mobile robot | |
| US20090187276A1 (en) | Generating device of processing robot program | |
| WO2015120734A1 (zh) | 基于机器视觉的焊接轨迹校正专用测试装置及方法 | |
| JP7337495B2 (ja) | 画像処理装置およびその制御方法、プログラム | |
| CN104827480A (zh) | 机器人系统的自动标定方法 | |
| KR101972432B1 (ko) | 레이저비전 센서 및 그 보정방법 | |
| JP2008021092A (ja) | ロボットシステムのシミュレーション装置 | |
| JP2005149299A (ja) | 教示位置修正装置 | |
| CN112238453B (zh) | 视觉导引机器手臂校正方法 | |
| JP4572497B2 (ja) | ロボット制御装置 | |
| US12186920B2 (en) | Robot system | |
| JP7436627B2 (ja) | 画像処理装置、作業指示作成システム、作業指示作成方法 | |
| TW202102347A (zh) | 視覺導引機器手臂校正方法 | |
| CN115847417B (zh) | 一种基于视觉检测的对位贴合方法、系统及介质 | |
| JP5123127B2 (ja) | ワークの位置を求める画像処理装置 | |
| JP2006224291A (ja) | ロボットシステム | |
| WO2020137184A1 (ja) | 自動溶接システム、エレベーターかご室部品の製造方法、および自動溶接方法 | |
| CN112643718B (zh) | 图像处理设备及其控制方法和存储其控制程序的存储介质 | |
| US12420424B2 (en) | Coordinate system setting system and position/orientation measurement system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110523 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120905 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121025 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151102 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5123127 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |