JP2010042466A - ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 - Google Patents
ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 Download PDFInfo
- Publication number
- JP2010042466A JP2010042466A JP2008207281A JP2008207281A JP2010042466A JP 2010042466 A JP2010042466 A JP 2010042466A JP 2008207281 A JP2008207281 A JP 2008207281A JP 2008207281 A JP2008207281 A JP 2008207281A JP 2010042466 A JP2010042466 A JP 2010042466A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- dimensional model
- attention area
- display
- viewpoint
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Abstract
【解決手段】ロボット教示システム10は、ロボット、該ロボットの周囲環境を構成する複数の物体、及び該ロボットによって取り扱われるワークの3次元モデルを含む3次元モデル空間におけるロボットの動作のシミュレーションを行うシミュレーション装置16と、設定された視点から注目領域を見るときに視覚的障害となる物体の部分を非表示にして3次元モデル空間におけるロボットの動作のシミュレーションの結果を表示する画像データを演算する表示画像演算装置18とを備え、表示画像演算装置18によって演算された画像データに基づく画像を表示装置20に表示する。
【選択図】図1
Description
3次元モデル空間において視点及び注目領域を設定し、前記3次元モデル空間において前記視点から前記注目領域を見るときに視覚的障害となる物体の部分を非表示にして、前記注目領域が常に表示されるように前記ロボットの動作のシミュレーションの結果を表示する画像データを演算し、演算された画像データに基づく画像を前記表示装置に表示するようにしたロボットの動作のシミュレーション結果の表示方法が提供される。
ロボット教示システム10は、記憶装置12と、入力装置14と、シミュレーション装置16と、表示画像演算装置18と、表示装置20とを備え、シミュレーション装置16によって得られたシミュレーションの結果を、設定された視点から注目領域を見たときの画像として、表示装置20上に表示するようになっている。
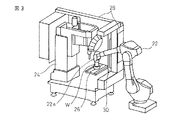
最初に、操作者は、ロボット22や、工作機械24、テーブル26及びそれらを取り囲むセル壁28のようなロボットの周囲環境の3次元モデルデータを入力装置14によって入力して3次元モデルを作成し、これを記憶装置12に記憶させる(ステップS100)。3次元モデルデータはキーボードなどによって直接入力してもよく、携帯可能な記憶媒体から予め作成された3次元モデルデータを読み取り装置などを通して記憶装置12に読み込ませてもよい。
平行投影法によって3次元モデル空間を表示装置20に表示する場合、表示画像演算装置18の非表示決定部36は、一つの例として、図5に示されるように、3次元モデル空間において、ロボット22や周囲環境などの物体の全てよりも視点42に近い側に所定の投影面46を規定する。この投影面46の法線方向と視点42の視線方向50は一致するように規定される。視線方向50に注目領域44を平行投影することによって投影面46上に投影される図形48を求めた後、例えば投影面46上の図形48の頂点の少なくとも一つとこれに対応する3次元モデル空間内の注目領域44の境界上の点とが重なるまで、この図形48を視線方向50に注目領域44に向かって掃引することによって図6に示されるような掃引図形52を求め、3次元モデル空間内の物体の一部分又は全体が求められた掃引図形52と干渉するとき、すなわち掃引図形の内部領域に位置するときに、その物体の部分又は全体を、設定された視点42から注目領域44を見るときに注目領域44の表示の妨げとなる視覚的障害と判定する。注目領域44を球形状や直方体形状の組み合わせで定義する場合、注目領域44を投影面46に平行投影することによって得られる図形48は球の中心や直方体の各頂点を投影するだけで容易に算出することが可能である。
透視投影法によって3次元モデル空間を表示装置20に表示する場合、表示画像演算装置18の非表示決定部36は、一つの例として、図7に示されるように、視点42の始点位置と注目領域44を結ぶ干渉確認図形54を求める。注目領域44を構成する要素が直方体形状の場合は、直方体の各稜線と、その稜線の両端の頂点と視点位置を結んだ線分で構成される各3角形で囲まれた領域として定義される。注目領域44を構成する要素が球形状の場合は、球の中心位置と半径から得られる円を底面とした円錐状の形状として定義される。干渉確認図形54から視覚的障害と判定される物体を求める方法は、平行投影法の場合と同様である。
16 シミュレーション装置
18 表示画像演算装置
20 表示装置
22 ロボット
32 視点設定部
34 注目領域設定部
36 非表示決定部
38 画像演算部
40 強制表示設定部
42 視点
44 注目領域
46 投影面
48 図形
50 視線方向
52 掃引図形
54 干渉確認図形
Claims (7)
- ロボット、該ロボットの周囲環境を構成する複数の物体、及び該ロボットによって取り扱われるワークの3次元モデルを含む3次元モデル空間において前記ロボットの動作のシミュレーションを行うシミュレーション装置と、前記3次元モデル空間における視点及び注目領域を入力するための入力装置と、前記入力装置によって入力された前記視点から見たときの画像として前記3次元モデル空間を表示する表示装置とを備え、前記3次元モデル空間における前記ロボットの動作のシミュレーションの結果を前記表示装置に表示しながら前記ロボットの動作の教示を行うためのロボット教示システムであって、
前記3次元モデル空間において前記視点から前記注目領域を見るときに視覚的障害となる物体の部分を非表示にして、前記3次元モデル空間における前記ロボットの動作のシミュレーションの結果を表示する画像データを演算する表示画像演算装置をさらに備え、前記表示画像演算装置によって演算された画像データに基づく画像を前記表示装置に表示するようにしたことを特徴とするロボット教示システム。 - 前記表示画像演算装置は、前記3次元モデル空間において、前記視点から前記注目領域を見るときの視線方向において前記3次元モデルの物体の全てよりも前記視点に近い側に投影面を規定し、前記投影面に対して前記注目領域を前記視線方向に平行投影したことにより得られた図形を前記視線方向に前記注目領域に向かって掃引することによって前記3次元モデル空間内に規定された掃引図形に干渉する前記3次元モデルの物体の部分を前記視覚的障害となる物体の部分として非表示にする、請求項1に記載のロボット教示システム。
- 前記表示画像演算装置は、前記視覚的障害となる部分を含む個々の物体の全体を非表示にして前記3次元モデル空間における前記ロボットの動作のシミュレーションの結果を表示する画像データを演算する、請求項1又は請求項2に記載のロボット教示システム。
- 前記入力装置によって強制表示領域を指定することができ、前記表示画像演算装置は、前記強制表示領域内に位置する物体の部分が視覚的障害となっても、前記物体の部分又は当該部分を含む個々の物体の全体を強制的に表示する、請求項1から請求項3の何れか一項に記載のロボット教示システム。
- 前記3次元モデル空間において前記視点から前記注目領域を見たときに視覚的障害となっても強制的に表示する物体の部分又は当該部分を含む個々の物体の全体を前記入力装置によって指定できるようにした、請求項4に記載のロボット教示システム。
- 前記注目領域は、前記ロボットの可動部分に対して所定の相対関係を有した領域として設定される、請求項1から請求項5の何れか一項に記載のロボット教示システム。
- ロボット、該ロボットの周囲環境を構成する複数の物体、及び該ロボットによって取り扱われるワークを含む3次元モデルを含む3次元モデル空間における前記ロボットの動作のシミュレーション結果を表示装置に表示する方法において、
3次元モデル空間において視点及び注目領域を設定し、前記3次元モデル空間において前記視点から前記注目領域を見るときに視覚的障害となる物体の部分を非表示にして、前記注目領域が常に表示されるように前記ロボットの動作のシミュレーションの結果を表示する画像データを演算し、演算された画像データに基づく画像を前記表示装置に表示するようにしたことを特徴とするロボットの動作のシミュレーション結果の表示方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008207281A JP5113666B2 (ja) | 2008-08-11 | 2008-08-11 | ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008207281A JP5113666B2 (ja) | 2008-08-11 | 2008-08-11 | ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010042466A true JP2010042466A (ja) | 2010-02-25 |
| JP5113666B2 JP5113666B2 (ja) | 2013-01-09 |
Family
ID=42014267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008207281A Active JP5113666B2 (ja) | 2008-08-11 | 2008-08-11 | ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5113666B2 (ja) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013094961A (ja) * | 2011-11-04 | 2013-05-20 | Fanuc Robotics America Corp | 3次元表示部を備えたロボット教示装置 |
| JP2014079824A (ja) * | 2012-10-15 | 2014-05-08 | Toshiba Corp | 作業画面表示方法および作業画面表示装置 |
| DE102013008062B4 (de) * | 2012-05-18 | 2015-07-16 | Fanuc Corporation | Betriebssimulationssystem für ein Robotersystem |
| WO2016129081A1 (ja) * | 2015-02-12 | 2016-08-18 | 東芝三菱電機産業システム株式会社 | 表示システム |
| JP2017177283A (ja) * | 2016-03-30 | 2017-10-05 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびシミュレーション装置 |
| CN107610579A (zh) * | 2017-09-05 | 2018-01-19 | 芜湖瑞思机器人有限公司 | 基于vr系统控制的工业机器人示教系统及其示教方法 |
| CN108527362A (zh) * | 2017-03-03 | 2018-09-14 | 株式会社基恩士 | 机器人设置设备、机器人设置方法和计算机可读记录介质 |
| JP2019048337A (ja) * | 2018-10-04 | 2019-03-28 | 東芝三菱電機産業システム株式会社 | 圧延ラインの表示システム |
| CN112041128A (zh) * | 2018-04-27 | 2020-12-04 | 川崎重工业株式会社 | 机器人的教导方法和机器人的教导系统 |
| JP2021024028A (ja) * | 2019-08-05 | 2021-02-22 | キヤノン株式会社 | 情報処理装置、情報処理装置の制御方法、および物品の製造方法 |
| CN114905506A (zh) * | 2022-04-15 | 2022-08-16 | 北京航空航天大学杭州创新研究院 | 一种基于视觉感知和空间认知神经机制的机器人导航系统 |
| US11420330B2 (en) | 2016-03-25 | 2022-08-23 | Seiko Epson Corporation | Robot control device, robot, and simulation device |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11184898A (ja) * | 1997-12-18 | 1999-07-09 | Fujitsu Ltd | 物体移動シミュレーション装置 |
| JP2004310591A (ja) * | 2003-04-09 | 2004-11-04 | Toyota Motor Corp | レイアウト設計装置およびレイアウト設計方法 |
| JP2005297097A (ja) * | 2004-04-07 | 2005-10-27 | Fanuc Ltd | オフラインプログラミング装置 |
| JP2007061983A (ja) * | 2005-09-01 | 2007-03-15 | Fanuc Ltd | ロボット監視システム |
-
2008
- 2008-08-11 JP JP2008207281A patent/JP5113666B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11184898A (ja) * | 1997-12-18 | 1999-07-09 | Fujitsu Ltd | 物体移動シミュレーション装置 |
| JP2004310591A (ja) * | 2003-04-09 | 2004-11-04 | Toyota Motor Corp | レイアウト設計装置およびレイアウト設計方法 |
| JP2005297097A (ja) * | 2004-04-07 | 2005-10-27 | Fanuc Ltd | オフラインプログラミング装置 |
| JP2007061983A (ja) * | 2005-09-01 | 2007-03-15 | Fanuc Ltd | ロボット監視システム |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9415509B2 (en) | 2011-11-04 | 2016-08-16 | Fanuc America Corporation | Robot teach device with 3-D display |
| JP2013094961A (ja) * | 2011-11-04 | 2013-05-20 | Fanuc Robotics America Corp | 3次元表示部を備えたロボット教示装置 |
| DE102013008062B4 (de) * | 2012-05-18 | 2015-07-16 | Fanuc Corporation | Betriebssimulationssystem für ein Robotersystem |
| JP2014079824A (ja) * | 2012-10-15 | 2014-05-08 | Toshiba Corp | 作業画面表示方法および作業画面表示装置 |
| CN107209912B (zh) * | 2015-02-12 | 2021-02-26 | 东芝三菱电机产业系统株式会社 | 显示系统 |
| WO2016129081A1 (ja) * | 2015-02-12 | 2016-08-18 | 東芝三菱電機産業システム株式会社 | 表示システム |
| CN107209912A (zh) * | 2015-02-12 | 2017-09-26 | 东芝三菱电机产业系统株式会社 | 显示系统 |
| JPWO2016129081A1 (ja) * | 2015-02-12 | 2017-10-05 | 東芝三菱電機産業システム株式会社 | 表示システム |
| US11420330B2 (en) | 2016-03-25 | 2022-08-23 | Seiko Epson Corporation | Robot control device, robot, and simulation device |
| JP2017177283A (ja) * | 2016-03-30 | 2017-10-05 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびシミュレーション装置 |
| CN108527362A (zh) * | 2017-03-03 | 2018-09-14 | 株式会社基恩士 | 机器人设置设备、机器人设置方法和计算机可读记录介质 |
| CN108527362B (zh) * | 2017-03-03 | 2022-10-04 | 株式会社基恩士 | 机器人设置设备、机器人设置方法和计算机可读记录介质 |
| CN107610579A (zh) * | 2017-09-05 | 2018-01-19 | 芜湖瑞思机器人有限公司 | 基于vr系统控制的工业机器人示教系统及其示教方法 |
| CN112041128A (zh) * | 2018-04-27 | 2020-12-04 | 川崎重工业株式会社 | 机器人的教导方法和机器人的教导系统 |
| CN112041128B (zh) * | 2018-04-27 | 2024-02-27 | 川崎重工业株式会社 | 机器人的教导方法和机器人的教导系统 |
| JP2019048337A (ja) * | 2018-10-04 | 2019-03-28 | 東芝三菱電機産業システム株式会社 | 圧延ラインの表示システム |
| JP2021024028A (ja) * | 2019-08-05 | 2021-02-22 | キヤノン株式会社 | 情報処理装置、情報処理装置の制御方法、および物品の製造方法 |
| JP7370755B2 (ja) | 2019-08-05 | 2023-10-30 | キヤノン株式会社 | 情報処理装置、情報処理方法、プログラム、記録媒体、および物品の製造方法 |
| CN114905506A (zh) * | 2022-04-15 | 2022-08-16 | 北京航空航天大学杭州创新研究院 | 一种基于视觉感知和空间认知神经机制的机器人导航系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5113666B2 (ja) | 2013-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5113666B2 (ja) | ロボット教示システム及びロボットの動作のシミュレーション結果の表示方法 | |
| Ong et al. | Augmented reality-assisted robot programming system for industrial applications | |
| CN110977931B (zh) | 使用了增强现实和混合现实的机器人控制装置及显示装置 | |
| Pai et al. | Augmented reality–based programming, planning and simulation of a robotic work cell | |
| Lampen et al. | Combining simulation and augmented reality methods for enhanced worker assistance in manual assembly | |
| JP3732494B2 (ja) | シミュレーション装置 | |
| JP4817603B2 (ja) | 工業ロボットをプログラミングするための方法およびシステム | |
| US7236854B2 (en) | Method and a system for programming an industrial robot | |
| CN101970184B (zh) | 动作教导系统以及动作教导方法 | |
| Fang et al. | Novel AR-based interface for human-robot interaction and visualization | |
| US10166673B2 (en) | Portable apparatus for controlling robot and method thereof | |
| US20070293986A1 (en) | Robot simulation apparatus | |
| JP6449534B2 (ja) | ロボットシミュレータ用の教示点プログラム選択方法 | |
| EP1847359A2 (en) | Robot simulation apparatus | |
| US20060269123A1 (en) | Method and system for three-dimensional measurement | |
| CN112313046A (zh) | 使用增强现实可视化和修改操作界定区域 | |
| JP2001105359A (ja) | ロボットシステム用グラフィック表示装置 | |
| Andersson et al. | AR-enhanced human-robot-interaction-methodologies, algorithms, tools | |
| CN101140598A (zh) | 部件识别图像处理器、生成部件识别图像的程序和存储程序的记录介质 | |
| Pai et al. | Virtual planning, control, and machining for a modular-based automated factory operation in an augmented reality environment | |
| JP4649554B1 (ja) | ロボット制御装置 | |
| Makita et al. | Offline direct teaching for a robotic manipulator in the computational space | |
| JP3765061B2 (ja) | 多次元形状の座標計測機用オフライン・ティーチング・システム | |
| JPS60195613A (ja) | 検証機能付ロボツト教示装置 | |
| WO2017032407A1 (en) | An industrial robot system and a method for programming an industrial robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110405 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120618 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120813 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120918 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121012 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5113666 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |