JP2010026596A - 地物確率モデル装置、地物確率モデル処理方法およびコンピュータプログラム - Google Patents
地物確率モデル装置、地物確率モデル処理方法およびコンピュータプログラム Download PDFInfo
- Publication number
- JP2010026596A JP2010026596A JP2008184075A JP2008184075A JP2010026596A JP 2010026596 A JP2010026596 A JP 2010026596A JP 2008184075 A JP2008184075 A JP 2008184075A JP 2008184075 A JP2008184075 A JP 2008184075A JP 2010026596 A JP2010026596 A JP 2010026596A
- Authority
- JP
- Japan
- Prior art keywords
- state
- feature
- target
- value
- adjacent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Complex Calculations (AREA)
Abstract
【解決手段】本発明の地物確率モデル装置は、複数の地物ついて観測値と状態値とを格納する手段と、状態値毎に観測値の確率分布のパラメータを格納する手段と、対象地物の観測値と前記状態値の乖離度を表す状態・観測ポテンシャルを状態値毎に計算する手段と、前記状態値と前記対象地物の隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを状態値毎に計算する手段と、対象地物の重み係数を状態・観測ポテンシャルに掛け合わせ、対象地物およびその隣接地物間の隣接状況データおよび各々の重み係数を引数とする近傍構造関数に状態・状態ポテンシャルを掛け合わせ加算することにより前記状態値のエネルギーを状態値毎に計算する手段と、前記状態値毎に計算された前記エネルギーに基づきギブス分布計算を行い前記状態値毎の発生確率を計算する手段とを備える。
【選択図】図2
Description

Simultaneous Parameter Estimation and Segmentation of Gibbs Random Fields Using Simulated Annealing, Sridhar Lakshmanan他, IEEE Transaction on Pattern Analysis and Machine Intelligence. vol. 11, no. 8, 1989. Image Analysis, Random Fields and Markov Chain Monte Carlo Methods: A Mathematical Introduction, Gerhard Winkler , Springer, 2003, ISBN-10: 3540442138
地理空間上の複数の地物のそれぞれについて、前記地物から観測された観測値と、前記地物の状態を表す、第1〜第nの状態値の中から選択された状態値とを格納する状態・観測データ格納手段と、
前記第1〜第nの状態値毎に、前記観測値に関する確率分布または確率モデル、のパラメータを格納するパラメータ格納手段と、
前記複数の地物の重み係数をそれぞれ格納する重み係数格納手段と、
前記複数の地物の各々毎に、前記地物に隣接する隣接地物との隣接状況を表す隣接状況データを格納する隣接状況データ格納手段と、
前記複数の地物から対象地物を選択する対象地物選択手段と、
前記対象地物について前記第1〜第nの状態値を順次、対象状態値として選択する状態選択手段と、
前記対象状態値に対応する前記パラメータと前記対象地物の観測値とを用いて、前記対象地物の観測値と前記対象状態値の乖離度を表す状態・観測ポテンシャルを計算する状態・観測ポテンシャル計算手段と、
前記対象状態値と前記対象地物に隣接する対象隣接地物の状態値との関係に基づき、前記対象状態値と、前記対象隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを計算する状態・状態ポテンシャル計算手段と、
前記対象地物の重み係数を前記状態・観測ポテンシャルに掛け合わせることにより加重付状態・観測ポテンシャルを計算する加重付状態・観測ポテンシャル計算手段と、
前記対象地物の重み係数と、前記対象隣接地物の重み係数と、前記対象地物および前記対象隣接地物間に関する前記隣接状況データとのうち、少なくとも前記対象地物の重み係数と、前記対象隣接地物の重み係数とを引数とした近傍構造関数に、前記状態・状態ポテンシャルを掛け合わせることにより近傍構造状態・状態ポテンシャルを計算する近傍構造状態・状態ポテンシャル計算手段と、
前記加重付状態・観測ポテンシャルと、前記近傍構造状態・状態ポテンシャルを加算することにより前記対象状態値のエネルギーを計算するエネルギー計算手段と、
前記対象地物について、前記第1〜第nの状態値毎に計算された前記エネルギーに基づきギブス分布計算を行うことにより前記第1〜第nの状態値のうち少なくとも1つについてその発生確率を計算する確率計算手段と、
を備える。
地理空間上の複数の地物のそれぞれについて、前記地物から観測された観測値と、前記地物の状態を表す、第1〜第nの状態値の中から選択された状態値とを格納する状態・観測データ格納手段と、
前記第1〜第nの状態値毎に、前記観測値に関する確率分布または確率モデル、のパラメータを格納するパラメータ格納手段と、
前記複数の地物の重み係数をそれぞれ格納する重み係数格納手段と、
前記複数の地物の各々毎に、前記地物に隣接する隣接地物との隣接状況を表す隣接状況データを格納する隣接状況データ格納手段と、
を用意し、
前記複数の地物から対象地物を選択し、
前記対象地物について前記第1〜第nの状態値を順次、対象状態値として選択し、
前記対象状態値に対応する前記パラメータと前記対象地物の観測値とを用いて、前記対象地物の観測値と前記対象状態値の乖離度を表す状態・観測ポテンシャルを計算し、
前記対象状態値と前記対象地物に隣接する対象隣接地物の状態値との関係に基づき、前記対象状態値と、前記対象隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを計算し、
前記対象地物の重み係数を前記状態・観測ポテンシャルに掛け合わせることにより加重付状態・観測ポテンシャルを計算し、
前記対象地物の重み係数と、前記対象隣接地物の重み係数と、前記対象地物および前記対象隣接地物間に関する前記隣接状況データとのうち、少なくとも前記対象地物の重み係数と、前記対象隣接地物の重み係数とを引数とした近傍構造関数に、前記状態・状態ポテンシャルを掛け合わせることにより近傍構造状態・状態ポテンシャルを計算し、
前記加重付状態・観測ポテンシャルと、前記近傍構造状態・状態ポテンシャルを加算することにより前記対象状態値のエネルギーを計算し、
前記対象地物について、前記第1〜第nの状態値毎に計算された前記エネルギーに基づきギブス分布計算を行うことにより前記第1〜第nの状態値のうち少なくとも1つについてその発生確率を計算する。
地理空間上の複数の地物のそれぞれについて、前記地物から観測された観測値と、前記地物の状態を表す、第1〜第nの状態値の中から選択された状態値とを格納する状態・観測データ格納手段からデータを読み出すステップと、
前記第1〜第nの状態値毎に、前記観測値に関する確率分布または確率モデル、のパラメータを格納するパラメータ格納手段からデータを読み出すステップと、
前記複数の地物の重み係数をそれぞれ格納する重み係数格納手段からデータを読み出すステップと、
前記複数の地物の各々毎に、前記地物に隣接する隣接地物との隣接状況を表す隣接状況データを格納する隣接状況データ格納手段からデータを読み出すステップと、
前記複数の地物から対象地物を選択するステップと、
前記対象地物について前記第1〜第nの状態値を順次、対象状態値として選択するステップと、
前記対象状態値に対応する前記パラメータと前記対象地物の観測値とを用いて、前記対象地物の観測値と前記対象状態値の乖離度を表す状態・観測ポテンシャルを計算するステップと、
前記対象状態値と前記対象隣接地物の状態値との関係に基づき、前記対象状態値と、前記対象隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを計算するステップと、
前記対象地物の重み係数を前記状態・観測ポテンシャルに掛け合わせることにより加重付状態・観測ポテンシャルを計算するステップと、
前記対象地物の重み係数と、前記対象隣接地物の重み係数と、前記対象地物および前記対象隣接地物間に関する前記隣接状況データとのうち、少なくとも前記対象地物の重み係数と、前記対象隣接地物の重み係数とを引数とした近傍構造関数に、前記状態・状態ポテンシャルを掛け合わせることにより近傍構造状態・状態ポテンシャルを計算するステップと、
前記加重付状態・観測ポテンシャルと、前記近傍構造状態・状態ポテンシャルを加算することにより前記対象状態値のエネルギーを計算するステップと、
前記対象地物について、前記第1〜第nの状態値毎に計算された前記エネルギーに基づきギブス分布計算を行うことにより前記第1〜第nの状態値のうち少なくとも1つについてその発生確率を計算するステップと、
をコンピュータに実行させる。
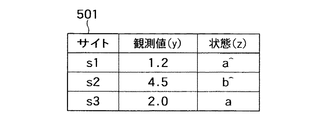
P( z3=a | z1=a, z2=b, y={1.2,4.5,2.0}) (2)
という確率を計算したいことを意味している。ここで、P(X=x)は確率変数Xが値xを取る確率を表す関数である。また、P(X=x|Y=y)は確率変数Yをyに固定した条件の下で確率変数Xが値xを取る確率を表す関数である。
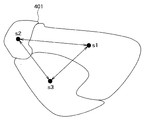
d12 =D12/Dave12 (3)
などを用いることも可能である。ここで、Dave12はサイトs1およびサイトs2について、隣接線分長の平均をとった値である。図6の604では式(3)を用いてサイト隣接度を算出している。例えばサイトs1とサイトs2との隣接線分長は1.00、サイトs1とサイトs3との隣接線分長は4.00、サイトs2とサイトs3との隣接線分長は1.00であるため、Dave12=(1+1+1+4)/4=1.75, D12=1となり、したがってd12=1/1.75≒0.57となる。この値がサイトs1とサイトs2の隣接度(あるいは隣接度係数)を表している。
P(z3=a) = exp(U(z3=a))/Z (5)
によって確率値を算出することが可能である。ここで、状態値zのエネルギーU(z)はzに関するすべてのポテンシャルH(z)を足し合わせたものである。また、Zはすべての状態値におけるエネルギーU’に関してexp(U’)を足し合わせたもの(Σexp(U’))である。
P(z3=a) = exp(U(z3=a))/(exp(U(z3=a)) + exp(U(z3=b)))
= exp(H1(z3=a))/(exp(H1(z3=a)) + exp(H1(z3=b)))
= exp(-1.92)/(exp(-1.92)+exp(-1.86)) ≒ 0.49
と算出できる(図7の702参照)。なお、本発明では、他のサイトの状態値が無視できない場合を取り扱っているため、上記のようにして条件付確率を求めるのではないことに注意する。
なお、通常のマルコフ確率場では、上で述べた状態・観測ポテンシャルH1と状態・状態ポテンシャルH2を用いてエネルギーを計算し、確率値を算出する。図9に通常のマルコフ確率場におけるエネルギー901と、算出された確率値902とを示す。図9において、例えば、エネルギーは、
U(z3=a) = H1(z3=a) + H2(z3=a | z1=a) + H2(z3=a | z2=b)
= -1.92 + 0 - 0.2 = -2.12
U(z3=b) = H1(z3=b) + H2(z3=b | z1=a) + H2(z3=b | z2=b)
= -1.86 - 0.2 + 0 = -2.06
と算出できる。そして、式(5)を用いて、
P(z3=a) = exp(U(z3=a))/(exp(U(z3=a)) + exp(U(z3=b)))
= exp(-2.12)/(exp(-2.12)+exp(-2.06)) ≒ 0.49
と確率値が算出できる。
H1’(z(i)) = w(i)*H1(z(i)) (6)
によってサイトの状態z(i)に対する加重付状態・観測ポテンシャルを算出する。
H2’(z(i), z(j)) = G(i, j)*H2(z(i), z(j)) (7)
によって、始点サイトsiと終点サイトsjのときのポテンシャルを算出する。ここで、G(i,j)は近傍構造関数である。近傍構造関数G(i,j)は以下の制約(A)〜(C)を満たすものとする。
(A)近傍構造関数G(i,j)は必ず引数として始点サイトの重み係数w(i)と終点サイトの重み係数w(j)を取らなければならない。
(B)また、近傍構造関数G(i,j)は、G(i,j)=G(j,i)をみたすという意味の対称関数でなければならない。
(C)さらに、近傍構造関数G(i,j)は、状態値z(i)またはz(j)によって異なる値を出力してはならない。すなわち、G(i,j)はz(i)またはz(j)を引数としてはならない。
P(z3=a) = exp(U’(z3=a))/(exp(U’(z3=a)) + exp(U’(z3=b)))
= exp(-6.10)/(exp(-6.10)+exp(-9.14)) ≒ 0.95
となる。ただし、
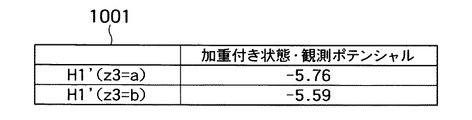
U’(z3=a) = H1’(z3=a) + H2’(z3=a|z1=a) + H2’(z3=a|z2=b) = -5.76+0-0.34=-6.10
U’(z3=b) = H1’(z3=b) + H2’(z3=b|z1=a) + H2’(z3=b|z2=b) = -5.59-3.56+0≒-9.14
である。
102:CPU
103:主記憶装置
104:外部記憶装置
105:入力装置
106:表示装置
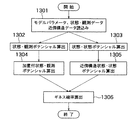
201:モデルパラメータ格納手段
202:状態・観測データ格納手段
203:近傍構造データ格納手段
204:状態・観測ポテンシャル算出手段
205:状態・状態ポテンシャル算出手段
206:加重付状態・観測ポテンシャル算出手段
207:近傍構造状態・状態ポテンシャル算出手段
208:ギブス確率算出手段
Claims (11)
- 地理空間上の複数の地物のそれぞれについて、前記地物から観測された観測値と、前記地物の状態を表す、第1〜第nの状態値の中から選択された状態値とを格納する状態・観測データ格納手段と、
前記第1〜第nの状態値毎に、前記観測値に関する確率分布または確率モデル、のパラメータを格納するパラメータ格納手段と、
前記複数の地物の重み係数をそれぞれ格納する重み係数格納手段と、
前記複数の地物の各々毎に、前記地物に隣接する隣接地物との隣接状況を表す隣接状況データを格納する隣接状況データ格納手段と、
前記複数の地物から対象地物を選択する対象地物選択手段と、
前記対象地物について前記第1〜第nの状態値を順次、対象状態値として選択する状態選択手段と、
前記対象状態値に対応する前記パラメータと前記対象地物の観測値とを用いて、前記対象地物の観測値と前記対象状態値の乖離度を表す状態・観測ポテンシャルを計算する状態・観測ポテンシャル計算手段と、
前記対象状態値と、前記対象地物に隣接する対象隣接地物の状態値との関係に基づき、前記対象状態値と、前記対象隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを計算する状態・状態ポテンシャル計算手段と、
前記対象地物の重み係数を前記状態・観測ポテンシャルに掛け合わせることにより加重付状態・観測ポテンシャルを計算する加重付状態・観測ポテンシャル計算手段と、
前記対象地物の重み係数と、前記対象隣接地物の重み係数と、前記対象地物および前記対象隣接地物間に関する前記隣接状況データとのうち、少なくとも前記対象地物の重み係数と、前記対象隣接地物の重み係数とを引数とした近傍構造関数に、前記状態・状態ポテンシャルを掛け合わせることにより近傍構造状態・状態ポテンシャルを計算する近傍構造状態・状態ポテンシャル計算手段と、
前記加重付状態・観測ポテンシャルと、前記近傍構造状態・状態ポテンシャルを加算することにより前記対象状態値のエネルギーを計算するエネルギー計算手段と、
前記対象地物について、前記第1〜第nの状態値毎に計算された前記エネルギーに基づきギブス分布計算を行うことにより前記第1〜第nの状態値のうち少なくとも1つについてその発生確率を計算する確率計算手段と、
を備えた地物確率モデル装置。 - 前記近傍構造関数は、前記対象地物の前記重み係数と、前記対象隣接地物の重み係数とを加えたものを2で割った値を算出する
ことを特徴とする請求項1に記載の地物確率モデル装置 - 前記近傍構造関数は、前記対象地物の前記重み係数の平方根と、前記対象隣接地物の前記重み係数の平方根とを掛け合わせた値を算出する
ことを特徴とする請求項1に記載の地物確率モデル装置。 - 前記近傍構造データは、前記複数の地物の各々毎に、前記地物と前記隣接地物との隣接長に基づく隣接度係数を含み、
前記近傍構造関数は、前記対象地物の前記重み係数の平方根、前記対象隣接地物の前記重み係数の平方根、前記対象地物および前記対象隣接地物間の前記隣接度係数を掛け合わせた値を算出する、
ことを特徴とする請求項1に記載の地物確率モデル装置。 - 前記近傍構造データは、前記複数の地物の各々毎に、前記地物と前記隣接地物との隣接長に基づく隣接度係数を含み、
前記近傍構造関数は、
前記対象地物の前記重み係数と、前記対象地物および前記対象隣接地物間の前記隣接度係数とを掛け合わせたものと、
前記対象隣接地物の前記重み係数と、前記対象隣接地物と前記対象地物間の前記隣接度係数とを掛け合わせたもの
を加えた値を算出する、
ことを特徴とする請求項1に記載の地物確率モデル装置。 - 前記近傍構造データは、前記複数の地物の各々毎に、前記地物と前記隣接地物との距離を表す距離係数を含み、
前記近傍構造関数は、前記対象地物の前記重み係数と前記対象隣接地物の前記重み係数とを掛け合わせたものを、前記対象地物と前記対象隣接地物間の前記距離係数の平方で割った値を算出する、
ことを特徴とする請求項1に記載の地物確率モデル装置。 - 前記近傍構造データは、前記複数の地物の各々毎に、前記地物と前記隣接地物との隣接長に基づく隣接度係数と、前記地物と前記隣接地物との距離を表す距離係数とを含み、
前記近傍構造関数は、前記対象地物の前記重み係数、前記対象隣接地物の前記重み係数、および、前記対象地物と前記対象隣接地物間の前記隣接度係数を掛け合わせたものを、前記対象地物と前記対象隣接地物間の前記距離係数の平方で割った値を算出する、
ことを特徴とする請求項1に記載の地物確率モデル装置。 - 前記確率計算手段は、前記第1〜第nの状態値のそれぞれについて前記発生確率を計算し、最も値の大きい発生確率を、前記対象地物の状態値として採択する
ことを特徴とする請求項1ないし8のいずれか一項に記載の地物確率モデル装置。 - 前記確率計算手段は、前記第1〜第nの状態値毎に計算された前記エネルギーをそれぞれU1〜Unとしたとき、前記第nの状態値の発生確率を、
ことを特徴とする請求項1ないし8のいずれか一項に記載の地物確率モデル装置。 - 地理空間上の複数の地物のそれぞれについて、前記地物から観測された観測値と、前記地物の状態を表す、第1〜第nの状態値の中から選択された状態値とを格納する状態・観測データ格納手段と、
前記第1〜第nの状態値毎に、前記観測値に関する確率分布または確率モデル、のパラメータを格納するパラメータ格納手段と、
前記複数の地物の重み係数をそれぞれ格納する重み係数格納手段と、
前記複数の地物の各々毎に、前記地物に隣接する隣接地物との隣接状況を表す隣接状況データを格納する隣接状況データ格納手段と、
を用意し、
前記複数の地物から対象地物を選択し、
前記対象地物について前記第1〜第nの状態値を順次、対象状態値として選択し、
前記対象状態値に対応する前記パラメータと前記対象地物の観測値とを用いて、前記対象地物の観測値と前記対象状態値の乖離度を表す状態・観測ポテンシャルを計算し、
前記対象状態値と前記対象地物に隣接する対象隣接地物の状態値との関係に基づき、前記対象状態値と、前記対象隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを計算し、
前記対象地物の重み係数を前記状態・観測ポテンシャルに掛け合わせることにより加重付状態・観測ポテンシャルを計算し、
前記対象地物の重み係数と、前記対象隣接地物の重み係数と、前記対象地物および前記対象隣接地物間に関する前記隣接状況データとのうち、少なくとも前記対象地物の重み係数と、前記対象隣接地物の重み係数とを引数とした近傍構造関数に、前記状態・状態ポテンシャルを掛け合わせることにより近傍構造状態・状態ポテンシャルを計算し、
前記加重付状態・観測ポテンシャルと、前記近傍構造状態・状態ポテンシャルを加算することにより前記対象状態値のエネルギーを計算し、
前記対象地物について、前記第1〜第nの状態値毎に計算された前記エネルギーに基づきギブス分布計算を行うことにより前記第1〜第nの状態値のうち少なくとも1つについてその発生確率を計算する、
地物確率モデル処理方法。 - 地理空間上の複数の地物のそれぞれについて、前記地物から観測された観測値と、前記地物の状態を表す、第1〜第nの状態値の中から選択された状態値とを格納する状態・観測データ格納手段からデータを読み出すステップと、
前記第1〜第nの状態値毎に、前記観測値に関する確率分布または確率モデル、のパラメータを格納するパラメータ格納手段からデータを読み出すステップと、
前記複数の地物の重み係数をそれぞれ格納する重み係数格納手段からデータを読み出すステップと、
前記複数の地物の各々毎に、前記地物に隣接する隣接地物との隣接状況を表す隣接状況データを格納する隣接状況データ格納手段からデータを読み出すステップと、
前記複数の地物から対象地物を選択するステップと、
前記対象地物について前記第1〜第nの状態値を順次、対象状態値として選択するステップと、
前記対象状態値に対応する前記パラメータと前記対象地物の観測値とを用いて、前記対象地物の観測値と前記対象状態値の乖離度を表す状態・観測ポテンシャルを計算するステップと、
前記対象状態値と前記対象地物に隣接する対象隣接地物の状態値との関係に基づき、前記対象状態値と、前記対象隣接地物の状態値との乖離度を表す状態・状態ポテンシャルを計算するステップと、
前記対象地物の重み係数を前記状態・観測ポテンシャルに掛け合わせることにより加重付状態・観測ポテンシャルを計算するステップと、
前記対象地物の重み係数と、前記対象隣接地物の重み係数と、前記対象地物および前記対象隣接地物間に関する前記隣接状況データとのうち、少なくとも前記対象地物の重み係数と、前記対象隣接地物の重み係数とを引数とた近傍構造関数に、前記状態・状態ポテンシャルを掛け合わせることにより近傍構造状態・状態ポテンシャルを計算するステップと、
前記加重付状態・観測ポテンシャルと、前記近傍構造状態・状態ポテンシャルを加算することにより前記対象状態値のエネルギーを計算するステップと、
前記対象地物について、前記第1〜第nの状態値毎に計算された前記エネルギーに基づきギブス分布計算を行うことにより前記第1〜第nの状態値のうち少なくとも1つについてその発生確率を計算するステップと、
をコンピュータに実行させるためのコンピュータプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184075A JP5248227B2 (ja) | 2008-07-15 | 2008-07-15 | 地物確率モデル装置、地物確率モデル処理方法およびコンピュータプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184075A JP5248227B2 (ja) | 2008-07-15 | 2008-07-15 | 地物確率モデル装置、地物確率モデル処理方法およびコンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010026596A true JP2010026596A (ja) | 2010-02-04 |
| JP5248227B2 JP5248227B2 (ja) | 2013-07-31 |
Family
ID=41732403
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008184075A Expired - Fee Related JP5248227B2 (ja) | 2008-07-15 | 2008-07-15 | 地物確率モデル装置、地物確率モデル処理方法およびコンピュータプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5248227B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10579933B2 (en) | 2014-12-18 | 2020-03-03 | International Business Machines Corporation | Processing apparatus, processing method, estimating apparatus, estimating method, and program |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005227067A (ja) * | 2004-02-12 | 2005-08-25 | Yokogawa Denshikiki Co Ltd | 環境情報予測システム |
-
2008
- 2008-07-15 JP JP2008184075A patent/JP5248227B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005227067A (ja) * | 2004-02-12 | 2005-08-25 | Yokogawa Denshikiki Co Ltd | 環境情報予測システム |
Non-Patent Citations (3)
| Title |
|---|
| CSNG199901442004; 金子 博: '画像のモデル化とマルコフ場' 電子情報通信学会誌 第74巻, 第4号, 19910425, p.335-342, 社団法人電子情報通信学会 * |
| JPN6012049930; Shashi Shekhar, et al.: 'Spatial Contextual Classification and Prediction Models for Mining Geospatial Data' IEEE Transactions on Multimedia vol.4, no.2, 200206, p.174-188 * |
| JPN6012067775; 金子 博: '画像のモデル化とマルコフ場' 電子情報通信学会誌 第74巻, 第4号, 19910425, p.335-342, 社団法人電子情報通信学会 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10579933B2 (en) | 2014-12-18 | 2020-03-03 | International Business Machines Corporation | Processing apparatus, processing method, estimating apparatus, estimating method, and program |
| US11227228B2 (en) | 2014-12-18 | 2022-01-18 | International Business Machines Corporation | Processing apparatus, processing method, estimating apparatus, estimating method, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5248227B2 (ja) | 2013-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Moniz et al. | Resampling strategies for imbalanced time series forecasting | |
| Macabuag et al. | A proposed methodology for deriving tsunami fragility functions for buildings using optimum intensity measures | |
| US20190156357A1 (en) | Advanced computational prediction models for heterogeneous data | |
| Abolghasemi et al. | Machine learning applications in time series hierarchical forecasting | |
| US20210125067A1 (en) | Information processing device, information processing method, and program | |
| US8762314B2 (en) | Predictions using aggregate information | |
| JP6299759B2 (ja) | 予測関数作成装置、予測関数作成方法、及びプログラム | |
| Shafiei-Monfared et al. | A novel approach for complexity measure analysis in design projects | |
| US20110125548A1 (en) | Business services risk management | |
| JP7044153B2 (ja) | 評価システム、評価方法および評価用プログラム | |
| Bistaffa et al. | Algorithms for graph-constrained coalition formation in the real world | |
| Croft et al. | Structuring the unstructured: estimating species-specific absence from multi-species presence data to inform pseudo-absence selection in species distribution models | |
| Bandeira et al. | Comparison of selection and combination strategies for demand forecasting methods | |
| JP5175515B2 (ja) | モデル構築装置並びにモデル構築のための方法およびプログラム | |
| WO2020012589A1 (ja) | 情報処理システム、情報処理方法及び記憶媒体 | |
| Bergillos Varela | A study of visibility graphs for time series representations | |
| Maitra | Adaptive Bayesian optimization algorithm for unpredictable business environments | |
| JP5248227B2 (ja) | 地物確率モデル装置、地物確率モデル処理方法およびコンピュータプログラム | |
| JP7599329B2 (ja) | 需要予測装置、需要予測方法およびプログラム | |
| Emhjellen et al. | Investment cost estimates and investment decisions | |
| Wang et al. | App Download Forecasting: An Evolutionary Hierarchical Competition Approach. | |
| JP6828830B2 (ja) | 評価システム、評価方法および評価用プログラム | |
| Houghton et al. | A survey of methods for data inclusion in System Dynamics models: methods, tools and applications | |
| US20140236666A1 (en) | Estimating, learning, and enhancing project risk | |
| US20110185167A1 (en) | Change impact research support device and change impact research support method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130410 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160419 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |