JP2010020692A - 論理時刻を用いた模擬システム及び送信側模擬装置及び模擬プログラム - Google Patents
論理時刻を用いた模擬システム及び送信側模擬装置及び模擬プログラム Download PDFInfo
- Publication number
- JP2010020692A JP2010020692A JP2008182752A JP2008182752A JP2010020692A JP 2010020692 A JP2010020692 A JP 2010020692A JP 2008182752 A JP2008182752 A JP 2008182752A JP 2008182752 A JP2008182752 A JP 2008182752A JP 2010020692 A JP2010020692 A JP 2010020692A
- Authority
- JP
- Japan
- Prior art keywords
- movement information
- extrapolation
- simulation
- time
- simulated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
【解決手段】論理プロセッサ間で移動体の移動情報の情報交換を行う場合に、移動情報の送信側と受信側の双方の論理プロセッサで同じアルゴリズムによる外挿処理を行う。
送信側論理プロセッサは、移動体の模擬処理の移動情報(模擬移動情報)と外挿処理の移動情報(外挿移動情報)とが異なる場合にのみ模擬移動情報を受信側プロセッサに送信することに加え、さらに将来の時刻においても模移動情報と外挿移動情報が一定するかを判定し、一致している場合にはその将来時刻までを分散シミュレーション基盤への次時刻の要求時刻とする。これにより移動情報の送信回数の低減に加えて、論理時刻の進行回数を削減することが可能となり、は高速シミュレーションが可能となる。
【選択図】図5
Description
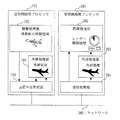
(1)送信側論理プロセッサ101は、移動体の模擬処理を行い、移動情報を他の論理プロセッサに対して送信する。
(2)模擬処理部102は、送信側論理プロセッサ101において移動体の模擬処理を行う。
(3)外挿処理部103は、移動体の移動情報を外挿する。
(4)送信可否判定部104は、模擬処理部102における移動体模擬処理の結果である移動情報と、外挿処理部103における移動体外挿処理の結果である移動情報を比較し、ある閾値を超えた場合にのみ外部の論理プロセッサに移動情報を送信することを決定する。
(5)受信側論理プロセッサ201は、他の送信側論理プロセッサから移動体の移動情報を受信する。
(6)模擬処理部202は、受信側論理プロセッサにおいて、他の送信側論理プロセッサで模擬された移動体移動情報を基にレーダの模擬処理を行う。
(7)外挿処理部203は、他の送信側論理プロセッサで模擬されている移動体の移動情報を外挿する。
(8)受信処理部204は、他の送信側論理プロセッサから送信された情報を受信する。
(9)ネットワーク300は、各論理プロセッサを接続し、情報の送受信に使用されるネットワークである。
IEEE 1278.1,IEEE Standard for Distributed Interactive Simulation − Application Protocols
移動体の動きを論理時刻に基づいて模擬することにより模擬による前記移動体の移動状況を示す模擬移動情報を生成すると共に所定のアルゴリズムを用いた第1外挿処理により外挿処理による前記移動体の移動状況を示す第1外挿移動情報を生成し、生成された前記模擬移動情報と前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定した場合に、前記模擬移動情報を送信し、かつ、前記第1外挿移動情報と一致しないと判定された前記模擬移動情報に基づいて前記第1外挿処理に用いられるパラメータを更新し、パラメータ更新後の前記第1外挿処理により前記第1外挿移動情報を生成する送信側模擬装置と、
前記所定のアルゴリズムと同一のアルゴリズムを用いた第2外挿処理により前記移動体の外挿移動情報である第2外挿移動情報を生成し、生成された前記第2外挿移動情報を用いて前記移動体を含む模擬を前記送信側模擬装置の用いる前記論理時刻に対応する論理時刻に基づいて実行すると共に、前記送信側模擬装置から前記模擬移動情報が送信された場合には前記模擬移動情報を受信し、受信された前記模擬移動情報に基づいて前記第2外挿処理に用いられるパラメータを更新し、パラメータ更新後の前記第2外挿処理により前記第2外挿移動情報を生成し、生成された前記第2外挿移動情報を用いて前記移動体を含む模擬を継続する受信側模擬装置と、
前記送信側模擬装置と前記受信側模擬装置とが用いる前記論理時刻の進行を管理する論理時刻管理装置と
を備え、
前記送信側模擬装置は、
前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定した場合に、さらに、予め設定された時刻進行幅から定まる将来時刻までの前記移動体の動きを模擬して模擬移動情報を生成し、前記将来時刻までの模擬移動情報と、パラメータ更新後の前記第1外挿処理により生成された前記第1外挿移動情報であって前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、一致すると判定した場合に、前記将来時刻を次に進行するべき次時刻として、前記論理時刻管理装置に要求することを特徴とする。
図1は、実施の形態1の分散シミュレーションシステム1000(模擬システム)を実現するコンピュータシステムの外観の一例を示している。分散シミュレーションシステム1000を構成する後述の送信側論理プロセッサ501、受信側論理プロセッサ601、分散シミュレーション基盤700等は、例えばソフトウェア(プログラム)としてコンピュータシステムで実行され実現される。分散シミュレーションシステム1000は、図1に示すように1台のコンピュータで実現されてもよいし、図2に示すように、ネットワークを介して接続された複数のコンピュータにより実現されても構わない。分散シミュレーションシステム1000が実現されるハードウェアは限定されない。
(1)送信側論理プロセッサ501は、分散シミュレーションシステムを構成する論理プロセッサのうち、移動体の模擬処理を実行し、模擬処理による移動情報を他の論理プロセッサに送信する。
(2)模擬処理部502は、送信側論理プロセッサ501において移動体の模擬処理を実行する。
(3)外挿処理部503は、模擬処理部502において模擬される移動体の移動情報を外挿処理する。
(4)送信可否判定部504は、模擬処理部502において模擬処理された結果を、外挿処理部503の外挿処理結果と比較し、送信するか否かを決定する。
(5)要求次時刻決定部505は、外挿処理部503において将来の時刻に渡って外挿処理を行った結果に基づき、送信側論理プロセッサ501が分散シミュレーション基盤700に対して要求する要求次時刻を決定する。
(1)受信側論理プロセッサ601は、送信側論理プロセッサ501から送信される移動体の移動情報を受信し、その移動情報に基づき模擬を行う。
(2)模擬処理部602は、受信側論理プロセッサ601において模擬処理を実行する。
(3)外挿処理部603は、受信側論理プロセッサ601において、他の送信側論理プロセッサ501で模擬される移動体の移動情報を外挿処理する。
(4)受信処理部604は、受信側論理プロセッサ601において送信側論理プロセッサ501から送信された情報を受信する。
分散シミュレーション基盤700は、各論理プロセッサの論理時刻による進行管理や、情報通信の管理を実行する。分散シミュレーション基盤700は、分散シミュレーションシステムの構築規約であるHLA(High Level Architecture:IEEE Std 1516)における、RTI(Run−Time Infrastrucuture)に相当する基盤機能であり、論理時刻に基づく分散シミュレーションでは、各論理プロセッサからの要求次時刻や受信するイベントを基に、各論理プロセッサが次に進むことができる論理時刻までの時刻進行許可を各論理プロセッサに返す。
図5は、送信側論理プロセッサ501の動作を示すシーケンスである。また図6は、図5の動作に関して、送信側論理プロセッサ501と受信側論理プロセッサ601との時刻進行状況を示す図である。
DISで規定されたDead Reckoningと同様に、処理の前提条件として、送信側論理プロセッサ501と受信側論理プロセッサ601との外挿処理部503(第1外挿処理を実行)と外挿処理部603(第2外挿処理を実行)とは、全く同一のアルゴリズムで外挿処理を行う。
その上で、送信側論理プロセッサ501では、模擬処理部502が移動体の模擬処理を実行し(ステップS11)、その模擬処理の結果である模擬移動情報(模擬処理により得られた移動情報を模擬移動情報という場合がある)を、送信可否判定部504に送る。この例では、図6に示すように、模擬処理部502は、S11において、現在時刻T0のときに、次の時刻である時刻T1における模擬移動情報を生成する。
それと同時に、外挿処理部503は、該当移動体の前の時刻における位置、進行方向、速度、加速度などから移動情報(時刻T1)の外挿処理(第1外挿処理:送信側の外挿処理)を行い(S12)、時刻T1における外挿移動情報(外挿処理の結果得られた移動情報を、外挿移動情報という場合がある)を送信可否判定部504に送る。外挿アルゴリズムは、例えば図9に示したような、前の時刻の移動情報を用いた外挿アルゴリズムを用いる。
送信可否判定部504は、まず同一時刻(時刻T1)における模擬処理された位置(模擬移動情報の一例)と外挿処理された位置(外挿移動情報の一例)とを比較(S13a)し、予め設定された判定基準に従って、両者が一致するかどうかを判定する。例えば図10で説明したような閾値による判定基準である。送信可否判定部504は、両者が一致しないと判定した場合は(S13aの不一致)、模擬移動情報を外部の受信側論理プロセッサ601に送信する必要があると判断し、分散シミュレーション基盤700を介して模擬移動情報(時刻T1)を受信側論理プロセッサ601に送信する(S13b、S21)。図6のS21を付した時刻T0からT1に向かう矢印が、図5のS21に相当する。また、送信可否判定部504は、同時に外挿処理部503に対して、模擬移動情報(時刻T1)を送信する(S13c)。一方、送信可否判定部504が模擬移動情報と外挿移動情報とが一致すると判定すると(S13aの一致の場合)、模擬処理部502及び外挿処理部503とは、次時刻「Ti+1」の処理を実行する。この場合の次時刻の処理とは、図6において時刻Tiに対する次の時刻Ti+1(i=1,2,3,4等)を意味する。
外挿処理部503は、送信可否判定部504からの模擬移動情報(時刻T1)を基に、外挿処理に利用するパラメータを更新する(S14)。パラメータの更新は、例えば図9に示した「ti、P(ti)、v(ti)、a(ti)」等と同様である。さらに、外挿処理部503は、「予め設定された時刻進行幅から定まる論理時刻(将来時刻)」までの移動体の模擬移動情報(時刻T2〜T5)を模擬処理部502に要求(S15)する。図6で説明する。外挿処理部503には、「予め設定された一定時間」として、時刻4きざみ(T1〜T5)ぶんの時刻進行幅である「T(進行)」が設定されている。図5のS15において、外挿処理部503は、将来の移動情報として、「T1+T(進行)」における時刻、すなわち時刻T5までの各時刻T2、T3、T4、T5における模擬移動情報を模擬処理部502に要求する。外挿処理部503は、模擬処理部502から、各時刻T2、T3、T4、T5における模擬移動情報を受信(S17)する。外挿処理部503は、各時刻における模擬移動情報を受信すると、S16で生成している各時刻T2、T3、T4、T5における外挿移動情報と、前記各時刻における模擬移動情報とを比較し、所定の基準に従って、時刻T2〜T5までの間で模擬処理結果(模擬移動情報)と外挿処理結果(外挿移動情報)とが一致しているかどうかを判定する(S18)。判定基準は例えば図10の場合と同じである。外挿処理部503は、一致していると判定すれば、その時刻(図6の例では時刻T5)を送信側論理プロセッサ501が次に進むべき「次時刻」として要求次時刻決定部505に出力する(S18の一致)。なお、送信側論理プロセッサ501は、この「次時刻」までの模擬移動情報と外挿移動情報との比較を全ての移動体に関して実行する。
要求次時刻決定部505は、外挿処理部503が出力した全ての移動体に関する「次時刻」と、模擬処理部502における更新間隔(図6における進行刻みである、T0〜T1の間隔)による次時刻のうち、一番小さい時刻を、送信側論理プロセッサ501の次時刻として分散シミュレーション基盤700(論理時刻管理装置)に時刻進行要求を行う(S19)。すなわち、要求次時刻決定部505は、S18の判定処理において、不一致の判定がなければ時刻T1に対して「予め設定された時刻進行幅から定まる論理時刻」(将来時刻)である時刻T5を次時刻として分散シミュレーション基盤700に時刻進行要求を送信する。一方、要求次時刻決定部505は、S18の判定処理において不一致の判定があれば時刻T1に対して模擬処理部502における更新間隔だけ先の時刻T2を次時刻として分散シミュレーション基盤700に時刻進行要求を送信する。
S20において、分散シミュレーション基盤700は、要求次時刻決定部505から受信した時刻進行要求に従って次時刻進行処理を実行する。分散シミュレーション基盤700は、時刻T5(将来時刻)を次時刻とする時刻進行要求を受信した場合には、送信側論理プロセッサ501の時刻進行要求に従って、図6のように、「時刻の進行許可間隔」を時刻T1から時刻T5に延長する。したがって、受信側論理プロセッサ601の時刻の
進行許可も将来時刻T5まで延長される。これにより、
時刻進行回数を減らすことができる。すなわち、図6に示したように、Dead−Reckoningにより移動情報の送信が削除され、
且つ送信側論理プロセッサ501の時刻進行要求が将来時刻T5まで延びたことにより、受信側論理プロセッサ601の時刻の
進行許可も将来時刻T5まで延ばすことができ、結果として
時刻進行回数を減らすことができる。「時刻の進行許可間隔」が時刻T1から時刻T5に延長されることで、時刻T2、T3,T4
における同期処理が不要となり、処理の高速化を図ることができる。
一方、受信側論理プロセッサ601では、受信処理部604が模擬移動情報を送信側論理プロセッサ501から受信していない間は、模擬処理部602が、外挿処理部603により該当移動体の外挿処理(第2外挿処理)された外挿移動情報を利用して前記移動体を含む模擬処理を実行する。
実施の形態1では、前の時刻の移動情報を用いて外挿処理を行う例を示した。実施の形態2では、シミュレーションに予めシナリオとして与えられる移動体の経路情報を用いる例を示す。この経路情報は、図5のステップS16の外挿処理部503による外挿処理(第1外挿処理)において、外挿処理部503により使用される。
論理時刻に基づいて移動体を模擬する分散シミュレーションシステムにおいて、
送信側論理プロセッサと受信側論理プロセッサとは、
移動体の位置、進行方向、速度、加速度、姿勢などの移動情報を、同じアルゴリズムによる外挿処理を行い、
送信側論理プロセッサは、
実際の移動体の模擬処理による模擬移動情報と外挿処理による外挿移動情報とが異なる場合にのみ模擬移動情報を受信側論理プロセッサに送信し、さらに将来の時刻についても模擬移動情報と外挿移動情報が一致するか否かを判定し、一致する場合にはその将来の時刻を次時刻として分散シミュレーション基盤に要求する時刻とする。これにより、移動情報の送信回数と論理時刻の進行回数を削減し、高速なシミュレーションを実行することが可能な分散シミュレーションシステムを提供できる。
Claims (4)
- 移動体の動きを論理時刻に基づいて模擬することにより模擬による前記移動体の移動状況を示す模擬移動情報を生成すると共に所定のアルゴリズムを用いた第1外挿処理により外挿処理による前記移動体の移動状況を示す第1外挿移動情報を生成し、生成された前記模擬移動情報と前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定した場合に、前記模擬移動情報を送信し、かつ、前記第1外挿移動情報と一致しないと判定された前記模擬移動情報に基づいて前記第1外挿処理に用いられるパラメータを更新し、パラメータ更新後の前記第1外挿処理により前記第1外挿移動情報を生成する送信側模擬装置と、
前記所定のアルゴリズムと同一のアルゴリズムを用いた第2外挿処理により前記移動体の外挿移動情報である第2外挿移動情報を生成し、生成された前記第2外挿移動情報を用いて前記移動体を含む模擬を前記送信側模擬装置の用いる前記論理時刻に対応する論理時刻に基づいて実行すると共に、前記送信側模擬装置から前記模擬移動情報が送信された場合には前記模擬移動情報を受信し、受信された前記模擬移動情報に基づいて前記第2外挿処理に用いられるパラメータを更新し、パラメータ更新後の前記第2外挿処理により前記第2外挿移動情報を生成し、生成された前記第2外挿移動情報を用いて前記移動体を含む模擬を継続する受信側模擬装置と、
前記送信側模擬装置と前記受信側模擬装置とが用いる前記論理時刻の進行を管理する論理時刻管理装置と
を備え、
前記送信側模擬装置は、
前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定した場合に、さらに、予め設定された時刻進行幅から定まる将来時刻までの前記移動体の動きを模擬して模擬移動情報を生成し、前記将来時刻までの模擬移動情報と、パラメータ更新後の前記第1外挿処理により生成された前記第1外挿移動情報であって前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、一致すると判定した場合に、前記将来時刻を次に進行するべき次時刻として、前記論理時刻管理装置に要求することを特徴とする論理時刻を用いた模擬システム。 - 前記送信側模擬装置は、
前記移動体の移動経路を示す経路情報を保有すると共に、前記パラメータの更新された前記第1外挿処理により前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報を生成するときに、前記経路情報を参照することにより前記第1外挿移動情報を生成することを特徴とする請求項1記載の論理時刻を用いた模擬システム。 - 論理時刻を用いて移動体の動きを模擬すると共に、前記移動体の模擬結果を所定のタイミングで受信側の受信側模擬装置に送信する送信側模擬装置において、
移動体の動きを前記論理時刻に基づいて模擬することにより模擬による前記移動体の移動状況を示す模擬移動情報を生成する模擬処理部と、
所定のアルゴリズムを用いた第1外挿処理により外挿処理による前記移動体の移動状況を示す第1外挿移動情報を生成する外挿処理部と、
前記模擬処理部により生成された前記模擬移動情報と前記外挿処理部により生成された前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定した場合に、前記模擬移動情報を前記模擬結果として前記受信側送信部に送信する送信判定部と、
論理時刻を管理する論理時刻管理装置に対して、次に進行するべき次時刻への進行を要求する次時刻進行要求を送信する次時刻進行要求部と
を備え、
前記外挿処理部は、
前記第1外挿移動情報と一致しないと判定された前記模擬移動情報に基づいて前記第1外挿処理に用いられるパラメータを更新し、パラメータ更新後の前記第1外挿処理により前記第1外挿移動情報を生成し、
前記模擬処理部は、
前記送信判定部により前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定された場合に、予め設定された時刻進行幅から定まる将来時刻までの前記移動体の動きを模擬して前記模擬移動情報を生成し、
前記外挿処理部は、
前記将来時刻までの模擬移動情報と、パラメータ更新後の前記第1外挿処理により生成された前記第1外挿移動情報であって前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、
前記次時刻進行要求部は、
前記外挿処理部により前記将来時刻までの模擬移動情報と、前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報とが一致すると判定された場合に、前記将来時刻への進行を要求する前記次時刻進行要求を前記論理時刻管理装置に送信することを特徴とする送信側模擬装置。 - 論理時刻を用いて移動体の動きを模擬すると共に、前記移動体の模擬結果を受信側の受信側模擬装置に送信するコンピュータである送信側模擬装置に実行させる模擬プログラムにおいて、
(1)移動体の動きを前記論理時刻に基づいて模擬することにより模擬による前記移動体の移動状況を示す模擬移動情報を生成する処理、
(2)所定のアルゴリズムを用いた第1外挿処理により外挿処理による前記移動体の移動状況を示す第1外挿移動情報を生成する処理、
(3)生成された前記模擬移動情報と生成された前記第1外挿移動情報とが一致するかを所定の基準に従って判定し、前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定した場合に、前記模擬移動情報を前記模擬結果として前記受信側送信装置に送信する処理、
(4)前記第1外挿移動情報と一致しないと判定された前記模擬移動情報に基づいて前記第1外挿処理に用いられるパラメータを更新し、パラメータ更新後の前記第1外挿処理により前記第1外挿移動情報を生成する処理、
(5)前記模擬移動情報と前記第1外挿移動情報とが一致しないと判定された場合に、予め設定された時刻進行幅から定まる将来時刻までの前記移動体の動きを模擬して前記模擬移動情報を生成する処理、
(6)前記将来時刻までの模擬移動情報と、パラメータ更新後の前記第1外挿処理により生成された前記第1外挿移動情報であって前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報とが一致するかを所定の基準に従って判定する処理、
(7)前記将来時刻までの模擬移動情報と、前記将来時刻までの模擬移動情報に対応する前記第1外挿移動情報とが一致すると判定された場合に、前記将来時刻を次に進行するべき次時刻として時刻進行を要求する次時刻進行要求を前記論理時刻管理装置に送信する処理、
をコンピュータに実行させる模擬プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008182752A JP5274129B2 (ja) | 2008-07-14 | 2008-07-14 | 論理時刻を用いた模擬システム及び送信側模擬装置及び模擬プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008182752A JP5274129B2 (ja) | 2008-07-14 | 2008-07-14 | 論理時刻を用いた模擬システム及び送信側模擬装置及び模擬プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010020692A true JP2010020692A (ja) | 2010-01-28 |
| JP5274129B2 JP5274129B2 (ja) | 2013-08-28 |
Family
ID=41705491
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008182752A Expired - Fee Related JP5274129B2 (ja) | 2008-07-14 | 2008-07-14 | 論理時刻を用いた模擬システム及び送信側模擬装置及び模擬プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5274129B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011248600A (ja) * | 2010-05-26 | 2011-12-08 | Mitsubishi Electric Corp | 分散シミュレーションシステム |
| JP7494802B2 (ja) | 2021-06-08 | 2024-06-04 | トヨタ自動車株式会社 | マルチエージェントシミュレーションシステム及びマルチエージェントシミュレーション方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007233763A (ja) * | 2006-03-01 | 2007-09-13 | Mitsubishi Electric Corp | シミュレーション実行制御装置及びシミュレーション実行制御方法及びプログラム |
-
2008
- 2008-07-14 JP JP2008182752A patent/JP5274129B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007233763A (ja) * | 2006-03-01 | 2007-09-13 | Mitsubishi Electric Corp | シミュレーション実行制御装置及びシミュレーション実行制御方法及びプログラム |
Non-Patent Citations (3)
| Title |
|---|
| JOUNI SMED, コンピュータゲームのアルゴリズム&ネットワーキング, vol. 初版, JPN6013017627, 25 October 2007 (2007-10-25), pages 164 - 167, ISSN: 0002506645 * |
| WENTONG CAI: "An auto-adaptive dead reckoning algorithm for distributed interactive simulation", PARALLEL AND DISTRIBUTED SIMULATION, 1999. PROCEEDINGS. THIRTEENTH WORKSHOP ON, JPN6013017634, 1999, pages 82 - 89, XP010335131, ISSN: 0002506647, DOI: 10.1109/PADS.1999.766164 * |
| 塙 大: "予測誤差が推定可能な分散仮想環境上のDead Reckoningプロトコルの提案", 電子情報通信学会技術研究報告 MVE2006-43〜62, vol. 106, no. 234, JPN6013017629, 5 September 2006 (2006-09-05), pages 85 - 90, ISSN: 0002506646 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011248600A (ja) * | 2010-05-26 | 2011-12-08 | Mitsubishi Electric Corp | 分散シミュレーションシステム |
| JP7494802B2 (ja) | 2021-06-08 | 2024-06-04 | トヨタ自動車株式会社 | マルチエージェントシミュレーションシステム及びマルチエージェントシミュレーション方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5274129B2 (ja) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107330522B (zh) | 用于更新深度学习模型的方法、装置及系统 | |
| CN110262845B (zh) | 区块链使能的分布式计算任务卸载方法及系统 | |
| CN112579194B (zh) | 基于时延和事务吞吐量的区块链共识任务卸载方法及装置 | |
| KR20140014273A (ko) | 휴대용 컴퓨팅 디바이스의 스위치 패브릭들 내에서 그리고 스위치 패브릭들에 걸쳐 마스터-슬레이브 쌍들을 동적으로 생성하고 서비스하는 방법 및 시스템 | |
| CN109271245A (zh) | 一种区块处理任务的控制方法和装置 | |
| CN108923983B (zh) | 机会网络链路的预测方法、装置及可读存储介质 | |
| US20150134799A1 (en) | Path selection for network service requests | |
| US20150278305A1 (en) | Dynamic rules to optimize common information model queries | |
| JP2023548915A (ja) | 深層顔認識のためのメタ学習を用いたドメイン一般化マージン | |
| CN111291893B (zh) | 调度方法、调度系统、存储介质和电子装置 | |
| CN111026532B (zh) | 用于语音数据的消息队列管理方法 | |
| CN116167445A (zh) | 量子测量模式的处理方法、装置及电子设备 | |
| CN116089245A (zh) | 面向axi主设备接口的压力测试装置、方法以及系统 | |
| JP5157586B2 (ja) | エミュレータ装置 | |
| KR102553877B1 (ko) | 디앱에서 요구하는 높은 트랜잭션 처리량을 효율적으로 블록체인에서 처리하기 위한 방법 및 시스템 | |
| CN115237884A (zh) | 数据处理方法、系统、电子设备及计算机存储介质 | |
| JP5274129B2 (ja) | 論理時刻を用いた模擬システム及び送信側模擬装置及び模擬プログラム | |
| CN116911403B (zh) | 联邦学习的服务器和客户端的一体化训练方法及相关设备 | |
| JP2020522920A (ja) | コグニティブ・アプリケーションのためのエッジ・キャッシング | |
| CN114238404B (zh) | 数据的查询方法、装置、存储介质及设备 | |
| CN120450057A (zh) | 模型推理方法、电子设备及存储介质 | |
| CN119358637A (zh) | 基于边端协同的模型训练方法及相关设备 | |
| CN113095537B (zh) | 路径规划的方法和装置 | |
| WO2021255888A1 (ja) | アセスメント装置、代替モデル作成装置、アセスメント方法及びプログラム | |
| CN115617732B (zh) | Apb总线结构、片上系统、车辆及访问方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110601 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130514 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5274129 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |