JP2009222475A - 複合センサ - Google Patents
複合センサ Download PDFInfo
- Publication number
- JP2009222475A JP2009222475A JP2008065383A JP2008065383A JP2009222475A JP 2009222475 A JP2009222475 A JP 2009222475A JP 2008065383 A JP2008065383 A JP 2008065383A JP 2008065383 A JP2008065383 A JP 2008065383A JP 2009222475 A JP2009222475 A JP 2009222475A
- Authority
- JP
- Japan
- Prior art keywords
- arm
- acceleration
- angular velocity
- detection element
- axis direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Abstract
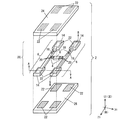
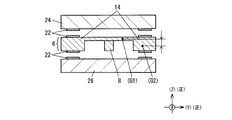
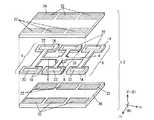
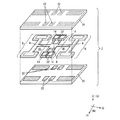
【解決手段】角速度検出部と加速度検出部とを有し、検出素子2は、第1アーム4と第2アーム6とを直交方向に連結して形成した直交アームと、第1アーム4の一端を支持する支持部8とを有し、互いに直交するX、Y、Z軸において、第1アーム4をX軸方向に配置し、第2アーム6をY軸方向に配置し、角速度検出部は、第2アーム6をX軸方向に振動させ、角速度に起因した検出素子2の状態変化に基づき角速度を検出しており、加速度検出部は、加速度に起因した検出素子2の状態変化に基づき加速度を検出しており、第1アーム4の厚みを支持部8の厚みよりも薄くした構成である。
【選択図】図1
Description
ョン等、各種電子機器に用いる角速度や加速度を検出する複合センサに関する。
数の角速度センサと加速度センサを各種電子機器の実装基板に各々実装していた。
させて、コリオリ力の発生に伴う検出素子の状態変化を電気的に検知して角速度を検出するものであり、加速度センサは、加速度に伴う検出素子の状態変化を検知して加速度を検出するものである。
動体の姿勢制御装置やナビゲーション装置等に用いている。
加速度センサを実装基板に各々実装するので実装面積を確保する必要があり、小型化を図
れないという問題点を有していた。
て小型化を図った複合センサを提供することを目的としている。
4 第1アーム
6 第2アーム
8 支持部
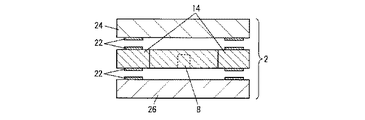
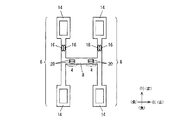
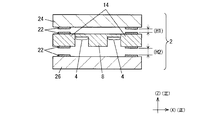
14 錘部
16 第1駆動電極
18 第2駆動電極
20 感知電極
22 対向電極
24 第1対向基板
26 第2対向基板
28 第3アーム
30 第4アーム
32 枠体
Claims (6)
- 加速度検出部と角速度検出部を有する検出素子を備え、
前記検出素子は、第1アームと第2アームとを直交方向に連結して形成した直交アームと、前記第1アームの一端を支持する支持部とを有し、
互いに直交するX、Y、Z軸において、前記第1アームをX軸方向に配置し、前記第2アームをY軸方向に配置し、
前記角速度検出部は、前記第2アームをX軸方向に振動させ、角速度に起因した前記検出素子の状態変化に基づき角速度を検出しており、
前記加速度検出部は、加速度に起因した前記検出素子の状態変化に基づき加速度を検出しており、
前記第1アームの厚みを前記支持部の厚みよりも薄くした複合センサ。 - 複数の直交アームを設け、前記検出素子は対称形状とした請求項1記載の複合センサ。
- 前記第2アームの厚みを前記第1アームの厚みよりも厚くした請求項1記載の複合センサ。
- 前記第2アームの先端部は錘部とし、前記第2アームは一方の先端部の錘部から他方の先端部の錘部まで同等の厚みとした請求項3記載の複合センサ。
- 前記第2アームに対向する対向部を設け、前記第2アームと前記対向部の各々の対向面に対向電極を配置し、前記加速度検出部は、加速度に起因した前記第2アームと前記対向部の対向電極間の静電容量変化に基づき、加速度を検出する請求項1記載の複合センサ。
- 前記対向部は、Z軸の方向に配置した対向基板であって、前記対向基板と前記第2アームとの対向面に前記対向電極を設けた請求項5記載の複合センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008065383A JP2009222475A (ja) | 2008-03-14 | 2008-03-14 | 複合センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008065383A JP2009222475A (ja) | 2008-03-14 | 2008-03-14 | 複合センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009222475A true JP2009222475A (ja) | 2009-10-01 |
| JP2009222475A5 JP2009222475A5 (ja) | 2011-03-31 |
Family
ID=41239429
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008065383A Pending JP2009222475A (ja) | 2008-03-14 | 2008-03-14 | 複合センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009222475A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011158464A (ja) * | 2010-01-05 | 2011-08-18 | Seiko Epson Corp | 振動素子、振動子、および電子機器 |
| US9121707B2 (en) | 2011-06-24 | 2015-09-01 | Seiko Epson Corporation | Bending vibration piece and electronic device |
| US9366535B2 (en) | 2011-07-21 | 2016-06-14 | Seiko Epson Corporation | Vibration gyro element, gyro sensor, and electronic apparatus |
| CN107407695A (zh) * | 2015-01-28 | 2017-11-28 | 因文森斯公司 | 平移式z轴加速度计 |
| JP2018084480A (ja) * | 2016-11-24 | 2018-05-31 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07128355A (ja) * | 1993-10-29 | 1995-05-19 | Japan Aviation Electron Ind Ltd | 1軸角速度/加速度センサ |
| JP2002243450A (ja) * | 2001-02-16 | 2002-08-28 | Victor Co Of Japan Ltd | 角速度センサ、加速度センサ及び角速度/加速度兼用センサ |
| JP2006162315A (ja) * | 2004-12-03 | 2006-06-22 | Matsushita Electric Ind Co Ltd | 複合センサ |
| JP2007256235A (ja) * | 2006-03-27 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 慣性力センサ |
| JP2007256234A (ja) * | 2006-03-27 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 慣性力センサ |
-
2008
- 2008-03-14 JP JP2008065383A patent/JP2009222475A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07128355A (ja) * | 1993-10-29 | 1995-05-19 | Japan Aviation Electron Ind Ltd | 1軸角速度/加速度センサ |
| JP2002243450A (ja) * | 2001-02-16 | 2002-08-28 | Victor Co Of Japan Ltd | 角速度センサ、加速度センサ及び角速度/加速度兼用センサ |
| JP2006162315A (ja) * | 2004-12-03 | 2006-06-22 | Matsushita Electric Ind Co Ltd | 複合センサ |
| JP2007256235A (ja) * | 2006-03-27 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 慣性力センサ |
| JP2007256234A (ja) * | 2006-03-27 | 2007-10-04 | Matsushita Electric Ind Co Ltd | 慣性力センサ |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011158464A (ja) * | 2010-01-05 | 2011-08-18 | Seiko Epson Corp | 振動素子、振動子、および電子機器 |
| US9121707B2 (en) | 2011-06-24 | 2015-09-01 | Seiko Epson Corporation | Bending vibration piece and electronic device |
| US9366535B2 (en) | 2011-07-21 | 2016-06-14 | Seiko Epson Corporation | Vibration gyro element, gyro sensor, and electronic apparatus |
| CN107407695A (zh) * | 2015-01-28 | 2017-11-28 | 因文森斯公司 | 平移式z轴加速度计 |
| JP2018084480A (ja) * | 2016-11-24 | 2018-05-31 | セイコーエプソン株式会社 | 物理量センサー、電子機器及び移動体 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5205725B2 (ja) | 角速度センサ | |
| JP5293187B2 (ja) | センサ | |
| US8122766B2 (en) | Inertia force sensor | |
| JP2006215016A (ja) | ジャイロスコープと加速度計との両方の機能を有するセンサ | |
| JP2007333643A (ja) | 慣性センサ | |
| US20140373626A1 (en) | Inertial force sensor | |
| JP2016530541A (ja) | 改良された直交位相補正を有するジャイロスコープ構造体およびジャイロスコープ | |
| JP2008076265A (ja) | 慣性力センサ | |
| JP2009222475A (ja) | 複合センサ | |
| JP2008224262A (ja) | 加速度センサ | |
| JP4858215B2 (ja) | 複合センサ | |
| WO2020203011A1 (ja) | 角速度センサ | |
| JP5125138B2 (ja) | 複合センサ | |
| JP2007256234A (ja) | 慣性力センサ | |
| JP2009156603A (ja) | 複合センサ | |
| JP2008232704A (ja) | 慣性力センサ | |
| JP2009222476A (ja) | 複合センサ | |
| JP2008122263A (ja) | 角速度センサ | |
| JP2008261771A (ja) | 慣性力センサ | |
| JP3783697B2 (ja) | 2軸検出型双音さ型振動ジャイロセンサ | |
| JP2010197061A (ja) | 慣性力検出素子 | |
| JP2011209270A (ja) | 角速度センサ素子 | |
| JP2008232703A (ja) | 慣性力センサ | |
| JP2007198778A (ja) | 慣性力センサ | |
| JP2008190887A (ja) | センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110209 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110209 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20110314 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120918 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20121213 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130129 |