JP2006273155A - 電動パワーステアリング装置 - Google Patents
電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP2006273155A JP2006273155A JP2005096219A JP2005096219A JP2006273155A JP 2006273155 A JP2006273155 A JP 2006273155A JP 2005096219 A JP2005096219 A JP 2005096219A JP 2005096219 A JP2005096219 A JP 2005096219A JP 2006273155 A JP2006273155 A JP 2006273155A
- Authority
- JP
- Japan
- Prior art keywords
- electric motor
- position detection
- rotational position
- power steering
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/032—Preventing damage to the motor, e.g. setting individual current limits for different drive conditions
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/181—Circuit arrangements for detecting position without separate position detecting elements using different methods depending on the speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2203/00—Indexing scheme relating to controlling arrangements characterised by the means for detecting the position of the rotor
- H02P2203/05—Determination of the rotor position by using two different methods and/or motor models
Abstract
【解決手段】 電動パワーステアリング装置10において、電動モータ20に複数の回転位置検出センサ61、62を設け、いずれか1つの回転位置検出センサ61の異常時に、いずれか他方の1つの回転位置検出センサ62の検出結果を用いて電動モータ20を駆動可能にするもの。
【選択図】 図3
Description
(a)電動モータに複数の回転位置検出センサを設けた。第1回転位置検出センサの検出結果を用いて電動モータに給電している過程で、第1回転位置検出センサが断線等により検出信号の送出に何らかの異常を生ずると、第1回転位置検出センサに代わる第2回転位置検出センサを直ちに切換え使用するものとし、正常な第2回転位置検出センサの検出結果を用いて電動モータに給電継続することとする。これにより、第1回転位置検出センサが機能喪失を生じた場合にも、電動モータの各巻線の励磁相に適正なタイミングで駆動電流を供給し続け、電動モータの機能障害を回避できる。
(b)電動モータとして三相ブラシレスモータを用いることにより、前述(a)において、電動モータの安定した滑らかな回転運動を確保できる。
(1)両回転位置検出センサ61、62の検出状態が正常であることを条件に、予め定めた一方、例えば第1回転位置検出センサ61の検出結果をPWM信号発生手段55に送出して電動モータ20を駆動し、
(2)第1回転位置検出センサ61の検出状態が異常を生じたとき、正常な第2回転位置検出センサ62の検出結果をPWM信号発生手段55に送出して電動モータ20を駆動する。
(a)電動モータ20に複数の回転位置検出センサ61、62を設けた。第1回転位置検出センサ61の検出結果を用いて電動モータ20に給電している過程で、第1回転位置検出センサ61が断線等により検出信号の送出に何らかの異常を生ずると、これを検知する異常制御手段70が第1回転位置検出センサ61に代わる第2回転位置検出センサ62を直ちに切換え使用するものとし、正常な第2回転位置検出センサ62の検出結果を用いて電動モータ20に給電継続することとする。これにより、第1回転位置検出センサ61が機能喪失を生じた場合にも、電動モータ20の各巻線101、102、103の励磁相u、v、wに適正なタイミングで駆動電流を供給し続け、電動モータ20の機能障害を回避できる。
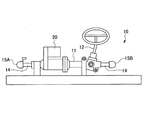
14 ラック軸
20 電動モータ
60 回転位置検出センサ
61 第1回転位置検出センサ
62 第2回転位置検出センサ
70 異常制御手段
Claims (2)
- 電動モータの回転を動力伝達機構によりラック軸のストロークに変換し、ラック軸に連結される車輪を操舵アシストするに際し、
電動モータとしてブラシレスモータを用い、固定子に巻回されて複数の励磁相からなる複数相の巻線を有し、回転位置検出センサが検出する回転子の回転位置に基づいて各巻線の励磁相に順次駆動電流を供給し、電動モータを駆動可能にする電動パワーステアリング装置において、
電動モータに複数の回転位置検出センサを設け、いずれか1つの回転位置検出センサの異常時に、いずれか他の1つの回転位置検出センサの検出結果を用いて電動モータを駆動可能にすることを特徴とする電動パワーステアリング装置。 - 前記電動モータが三相モータである請求項1に記載の電動パワーステアリング装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005096219A JP2006273155A (ja) | 2005-03-29 | 2005-03-29 | 電動パワーステアリング装置 |
| US11/227,513 US7187153B2 (en) | 2005-03-29 | 2005-09-15 | Motor-driven power steering apparatus |
| DE102005044899A DE102005044899A1 (de) | 2005-03-29 | 2005-09-20 | Servolenkvorrichtung, welche durch einen Motor betrieben wird |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005096219A JP2006273155A (ja) | 2005-03-29 | 2005-03-29 | 電動パワーステアリング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006273155A true JP2006273155A (ja) | 2006-10-12 |
Family
ID=36999059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005096219A Pending JP2006273155A (ja) | 2005-03-29 | 2005-03-29 | 電動パワーステアリング装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7187153B2 (ja) |
| JP (1) | JP2006273155A (ja) |
| DE (1) | DE102005044899A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011259666A (ja) * | 2010-06-11 | 2011-12-22 | Jtekt Corp | モータ制御装置 |
| JP2013522114A (ja) * | 2010-03-22 | 2013-06-13 | ツェットエフ、レンクジステメ、ゲゼルシャフト、ミット、ベシュレンクテル、ハフツング | サーボステアリング装置 |
| WO2017006719A1 (ja) * | 2015-07-03 | 2017-01-12 | 日立オートモティブシステムズ株式会社 | 三相同期電動機の駆動装置 |
| WO2017195600A1 (ja) * | 2016-05-13 | 2017-11-16 | 日本精工株式会社 | モータ駆動制御装置、電動パワーステアリング装置及び車両 |
| JP2019119417A (ja) * | 2018-01-11 | 2019-07-22 | 株式会社デンソー | 電動パワーステアリング装置 |
| JP2019170155A (ja) * | 2019-05-17 | 2019-10-03 | 日立オートモティブシステムズ株式会社 | 三相同期電動機の制御装置および駆動装置、並びに電動パワーステアリング装置 |
| JP2020001477A (ja) * | 2018-06-26 | 2020-01-09 | トヨタ自動車株式会社 | 車両用ステアリングシステム |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7500538B2 (en) * | 2004-04-30 | 2009-03-10 | Nsk Ltd. | Control unit for electric power steering apparatus |
| EP1854202B1 (de) * | 2005-03-04 | 2013-03-20 | ebm-papst St. Georgen GmbH & Co. KG | Elektromotor und verfahren zu seiner steuerung |
| JP2006335252A (ja) * | 2005-06-02 | 2006-12-14 | Jtekt Corp | 電動パワーステアリング装置 |
| US7414379B2 (en) * | 2005-10-14 | 2008-08-19 | Cambridge Technology, Inc. | Servo control system |
| JP2007225388A (ja) * | 2006-02-22 | 2007-09-06 | Nsk Ltd | 電動パワーステアリング装置 |
| JP4294039B2 (ja) * | 2006-06-23 | 2009-07-08 | 三菱電機株式会社 | パワーステアリング装置 |
| DE102007027039B4 (de) * | 2006-07-13 | 2013-02-28 | Ford Global Technologies, Llc | Bestimmung der absoluten Position eines Lenksystems durch einen Linearsensor an der Zahnstange |
| US7420350B2 (en) * | 2006-11-17 | 2008-09-02 | Gm Global Technology Operations, Inc. | Methods and apparatus for an active front steering actuator |
| JP4333751B2 (ja) * | 2007-02-15 | 2009-09-16 | 株式会社デンソー | ブラシレスモータの駆動装置 |
| JP5282376B2 (ja) * | 2007-06-29 | 2013-09-04 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP4469886B2 (ja) * | 2007-09-20 | 2010-06-02 | 日立オートモティブシステムズ株式会社 | 負荷駆動回路 |
| EP2080687B1 (en) * | 2008-01-16 | 2011-12-14 | Jtekt Corporation | Electric power steering device |
| JP4404160B2 (ja) * | 2008-01-21 | 2010-01-27 | ダイキン工業株式会社 | モータ駆動制御装置 |
| JP5316105B2 (ja) * | 2009-03-09 | 2013-10-16 | アイシン精機株式会社 | 油圧制御装置 |
| JP5789911B2 (ja) * | 2009-10-06 | 2015-10-07 | 株式会社ジェイテクト | 回転角検出装置及び電動パワーステアリング装置 |
| JP4877384B2 (ja) * | 2009-12-01 | 2012-02-15 | トヨタ自動車株式会社 | 操舵装置 |
| GB0921323D0 (en) * | 2009-12-07 | 2010-01-20 | Rolls Royce Plc | An electrical machine |
| JP5343955B2 (ja) * | 2009-12-25 | 2013-11-13 | 日本精工株式会社 | モータ制御装置及びそれを搭載した電動パワーステアリング装置 |
| JP5481236B2 (ja) | 2010-03-10 | 2014-04-23 | Ntn株式会社 | 電気自動車のモータ駆動システム |
| DE102010022513B4 (de) * | 2010-06-02 | 2021-04-15 | Zf Automotive Germany Gmbh | Verriegelungssystem für ein Fahrzeuglenksystem |
| JP5521954B2 (ja) * | 2010-09-29 | 2014-06-18 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| DE102010054135B4 (de) * | 2010-12-10 | 2013-03-28 | Thyssenkrupp Presta Ag | Handmomentensteller |
| US9680348B2 (en) * | 2013-10-22 | 2017-06-13 | Ultra Motion LLC | Actuator position sensing |
| KR20170002759A (ko) * | 2015-06-29 | 2017-01-09 | 현대자동차주식회사 | 홀센서 고장진단방법 |
| JP6557345B2 (ja) * | 2015-09-10 | 2019-08-07 | 日立オートモティブシステムズ株式会社 | パワーステアリング装置の制御装置及びパワーステアリング装置 |
| JP6679861B2 (ja) * | 2015-09-15 | 2020-04-15 | 株式会社デンソー | センサ装置、および、これを用いた電動パワーステアリング装置 |
| US10125699B2 (en) * | 2016-11-03 | 2018-11-13 | Borgwarner Inc. | Method and actuator for use on an engine having a monitoring arrangement for determining a characteristic of [(and)] the actuator and system |
| US9806656B1 (en) * | 2016-11-30 | 2017-10-31 | Steering Solutions Ip Holding Corporation | Fault tolerant phase current measurement for motor control systems |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003026020A (ja) * | 2001-07-11 | 2003-01-29 | Mitsubishi Electric Corp | 電動パワーステアリング装置およびこれに用いられる異常検出時の制御方法 |
| JP2004306860A (ja) * | 2003-04-09 | 2004-11-04 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2005073398A (ja) * | 2003-08-25 | 2005-03-17 | Favess Co Ltd | 回転機及び操舵システム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB9902438D0 (en) * | 1999-02-05 | 1999-03-24 | Trw Lucas Varity Electric | Improvements relating to electric power assisted steering assemblies |
| JP2000318627A (ja) | 1999-05-10 | 2000-11-21 | Nsk Ltd | 電動式パワーステアリング装置 |
| JP2002310727A (ja) * | 2001-04-13 | 2002-10-23 | Mitsubishi Electric Corp | 位置検出装置の異常検出装置およびその方法 |
| JP3839358B2 (ja) * | 2002-06-12 | 2006-11-01 | 株式会社ジェイテクト | 車両の操舵制御装置及び車両の操舵制御方法 |
| US7254470B2 (en) * | 2002-06-17 | 2007-08-07 | Delphi Technologies, Inc. | Fault tolerant torque sensor signal processing |
| JP4162442B2 (ja) * | 2002-07-26 | 2008-10-08 | 株式会社ジェイテクト | 車両用操舵制御システム |
| JP3875188B2 (ja) * | 2002-12-16 | 2007-01-31 | 株式会社ジェイテクト | 電動モータ装置 |
-
2005
- 2005-03-29 JP JP2005096219A patent/JP2006273155A/ja active Pending
- 2005-09-15 US US11/227,513 patent/US7187153B2/en active Active
- 2005-09-20 DE DE102005044899A patent/DE102005044899A1/de not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003026020A (ja) * | 2001-07-11 | 2003-01-29 | Mitsubishi Electric Corp | 電動パワーステアリング装置およびこれに用いられる異常検出時の制御方法 |
| JP2004306860A (ja) * | 2003-04-09 | 2004-11-04 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2005073398A (ja) * | 2003-08-25 | 2005-03-17 | Favess Co Ltd | 回転機及び操舵システム |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013522114A (ja) * | 2010-03-22 | 2013-06-13 | ツェットエフ、レンクジステメ、ゲゼルシャフト、ミット、ベシュレンクテル、ハフツング | サーボステアリング装置 |
| JP2011259666A (ja) * | 2010-06-11 | 2011-12-22 | Jtekt Corp | モータ制御装置 |
| WO2017006719A1 (ja) * | 2015-07-03 | 2017-01-12 | 日立オートモティブシステムズ株式会社 | 三相同期電動機の駆動装置 |
| JP2017017910A (ja) * | 2015-07-03 | 2017-01-19 | 日立オートモティブシステムズ株式会社 | 三相同期電動機の駆動装置 |
| US10411621B2 (en) | 2015-07-03 | 2019-09-10 | Hitachi Automotive Systems, Ltd. | Drive device for three-phase synchronous motor |
| CN109477733A (zh) * | 2016-05-13 | 2019-03-15 | 日本精工株式会社 | 马达驱动控制装置、电动助力转向装置和车辆 |
| JPWO2017195600A1 (ja) * | 2016-05-13 | 2018-08-16 | 日本精工株式会社 | モータ駆動制御装置、電動パワーステアリング装置及び車両 |
| WO2017195600A1 (ja) * | 2016-05-13 | 2017-11-16 | 日本精工株式会社 | モータ駆動制御装置、電動パワーステアリング装置及び車両 |
| US10501113B2 (en) | 2016-05-13 | 2019-12-10 | Nsk Ltd. | Motor drive control device, electric power steering device, and vehicle |
| US11192578B2 (en) | 2016-05-13 | 2021-12-07 | Nsk Ltd. | Motor drive control device, electric power steering device, and vehicle |
| JP2019119417A (ja) * | 2018-01-11 | 2019-07-22 | 株式会社デンソー | 電動パワーステアリング装置 |
| JP2020001477A (ja) * | 2018-06-26 | 2020-01-09 | トヨタ自動車株式会社 | 車両用ステアリングシステム |
| JP7035843B2 (ja) | 2018-06-26 | 2022-03-15 | トヨタ自動車株式会社 | 車両用ステアリングシステム |
| US11299195B2 (en) | 2018-06-26 | 2022-04-12 | Toyota Jidosha Kabushiki Kaisha | Vehicle steering system |
| JP2019170155A (ja) * | 2019-05-17 | 2019-10-03 | 日立オートモティブシステムズ株式会社 | 三相同期電動機の制御装置および駆動装置、並びに電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7187153B2 (en) | 2007-03-06 |
| US20060220607A1 (en) | 2006-10-05 |
| DE102005044899A1 (de) | 2006-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4509841B2 (ja) | 電動パワーステアリング装置 | |
| JP2006273155A (ja) | 電動パワーステアリング装置 | |
| US9371087B2 (en) | Power conversion device and electric power steering device using the same | |
| JP3839358B2 (ja) | 車両の操舵制御装置及び車両の操舵制御方法 | |
| JP4907283B2 (ja) | 電動パワーステアリング装置 | |
| US20130241452A1 (en) | Electric power steering apparatus | |
| JP2006036143A (ja) | 電動パワーステアリング装置 | |
| JP2004201364A (ja) | 電動モータ装置及び操舵システム | |
| JP2007145248A (ja) | 電動パワーステアリング装置 | |
| JP2007230275A (ja) | 電動パワーステアリング装置 | |
| JP3881180B2 (ja) | 車両用の伝達比可変操舵制御装置 | |
| JP2008080974A (ja) | 電動パワーステアリング装置 | |
| JP2006036142A (ja) | 電動パワーステアリング装置 | |
| JP2012218646A (ja) | 電動パワーステアリング装置 | |
| JP4020012B2 (ja) | 車両用操舵装置 | |
| JP4020013B2 (ja) | 車両用操舵装置 | |
| JP2006036146A (ja) | 電動パワーステアリング装置 | |
| JP5353195B2 (ja) | モータ制御装置および電気式動力舵取装置 | |
| JP4473142B2 (ja) | 電動パワーステアリング装置 | |
| JP4899679B2 (ja) | ステアバイワイヤシステム | |
| JP4612473B2 (ja) | 電動パワーステアリング装置 | |
| JP2004058800A (ja) | 電動パワーステアリング装置 | |
| JP4550603B2 (ja) | 電動パワーステアリング装置 | |
| JP4612472B2 (ja) | 電動パワーステアリング装置 | |
| JP4840842B2 (ja) | 電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100427 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100611 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110105 |