JP2006226802A - Compound sensor - Google Patents
Compound sensor Download PDFInfo
- Publication number
- JP2006226802A JP2006226802A JP2005040145A JP2005040145A JP2006226802A JP 2006226802 A JP2006226802 A JP 2006226802A JP 2005040145 A JP2005040145 A JP 2005040145A JP 2005040145 A JP2005040145 A JP 2005040145A JP 2006226802 A JP2006226802 A JP 2006226802A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- fixed base
- acceleration
- composite sensor
- sensor according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Abstract
Description
本発明は、航空機、自動車、ロボット、船舶、車両等の移動体の姿勢制御やナビゲーション等、各種電子機器に用いる角速度センサおよび加速度センサを複合した複合センサに関するものである。 The present invention relates to a composite sensor that combines an angular velocity sensor and an acceleration sensor used in various electronic devices such as attitude control and navigation of moving bodies such as aircraft, automobiles, robots, ships, and vehicles.
以下、従来の複合センサについて説明する。 Hereinafter, a conventional composite sensor will be described.
従来の複合センサは、角速度センサと加速度センサとを実装基板に各々実装して複合センサとしていた。 A conventional composite sensor is a composite sensor in which an angular velocity sensor and an acceleration sensor are each mounted on a mounting substrate.
従来の角速度センサは、例えば、音さ形状やH形状やT形状等、各種の形状の振動子を振動させて、コリオリ力の発生に伴う振動子の歪を電気的に検知して角速度を検出する。 Conventional angular velocity sensors, for example, vibrate vibrators of various shapes such as sound shape, H shape, T shape, etc., and electrically detect distortion of the vibrator accompanying the generation of Coriolis force to detect angular velocity To do.
また、従来の加速度センサは、錘部を有し、加速度に伴う錘部の可動を、可動前と比較検知して加速度を検出する。 Moreover, the conventional acceleration sensor has a weight part, and detects acceleration by comparing and detecting the movement of the weight part accompanying the acceleration with that before the movement.
このような角速度センサや加速度センサは、車両に搭載したナビゲーション装置や車両制御装置等に用いられる。 Such angular velocity sensors and acceleration sensors are used in navigation devices and vehicle control devices mounted on vehicles.
なお、この出願の発明に関連する先行技術文献情報としては、例えば、特許文献1および特許文献2が知られている。
上記構成の複合センサは、角速度センサと加速度センサとを各々実装基板に実装したものであり、角速度センサの実装面積と加速度センサの実装面積とを確保する必要があり、実装基板の小型化を図れないという問題点を有していた。 The composite sensor having the above-described configuration is obtained by mounting an angular velocity sensor and an acceleration sensor on each mounting board, and it is necessary to secure a mounting area for the angular velocity sensor and a mounting area for the acceleration sensor, so that the mounting board can be reduced in size. Had the problem of not.
本発明は上記問題点を解決し、角速度センサの実装面積と加速度センサの実装面積とを必要とせず、角速度センサと加速度センサとを複合して実装面積を低減し、実装基板の小型化を図った複合センサを提供することを目的としている。 The present invention solves the above-described problems, and does not require the mounting area of the angular velocity sensor and the mounting area of the acceleration sensor, but reduces the mounting area by combining the angular velocity sensor and the acceleration sensor, thereby reducing the size of the mounting board. It aims to provide a combined sensor.
上記目的を達成するために本発明は、特に、固定基部に連結した2つの錘部と、一方の前記錘部に一端を連結するとともに他方の前記錘部に他端を連結した第1振動素子と、前記錘部に一端を連結した第2振動素子とを設け、前記第1振動素子および前記第2振動素子を互いに駆動振動させ、前記錘部の可動に起因して変化する前記第1振動素子の駆動振動を検知して加速度を検出するとともに、コリオリ力に起因して変化する前記第2振動素子の屈曲振動を検知して角速度を検出する構成としたものである。 In order to achieve the above object, the present invention particularly relates to two weight parts connected to a fixed base, and a first vibration element having one end connected to one of the weight parts and the other end connected to the other weight part. And a second vibration element having one end connected to the weight portion, wherein the first vibration element and the second vibration element are driven to vibrate with each other, and the first vibration changes due to the movement of the weight portion. The driving vibration of the element is detected to detect acceleration, and the angular vibration is detected by detecting the bending vibration of the second vibrating element that changes due to the Coriolis force.
上記構成により、固定基部に連結した2つの錘部と、一方の錘部に一端を連結するとともに、他方の錘部に他端を連結した第1振動素子と、錘部に一端を連結した第2振動素子とを設け、これら第1振動素子および第2振動素子を互いに駆動振動させるので、加速度センサとしては、錘部の可動に起因して変化する第1振動素子の駆動振動を検知して加速度を検出することができ、角速度センサとしては、第2振動素子の屈曲振動を検知して角速度を検出することができる。 With the above configuration, the first and second weight parts connected to the fixed base, the first vibration element having one end connected to one weight part and the other end connected to the other weight part, and the first connected to the weight part. Since the first vibration element and the second vibration element are driven to vibrate with each other, the acceleration sensor detects the drive vibration of the first vibration element that changes due to the movement of the weight portion. The acceleration can be detected, and the angular velocity sensor can detect the angular velocity by detecting the bending vibration of the second vibration element.
すなわち、角速度センサと加速度センサとを複合でき、実装面積を低減して実装基板の小型化を図ることができる。 That is, the angular velocity sensor and the acceleration sensor can be combined, and the mounting area can be reduced and the mounting substrate can be downsized.
以下、実施の形態を用いて、本発明の全請求項に記載の発明について、図面を参照しながら説明する。 Hereinafter, the invention described in all claims of the present invention will be described using embodiments with reference to the drawings.
図1は本発明の一実施の形態におけるケース未装着の複合センサの斜視図、図2は図1のA部の斜視図、図3は図2のA−A断面図、図4は図1のB部の斜視図、図5は図4のA−A断面図、図6は図4のB−B断面図、図7は図1のA部の駆動状態と動作状態を示す斜視図、図8は加速度検出回路図、図9は第1振動素子の駆動時における駆動信号の波形図、図10は図1のB部の駆動状態を示す斜視図、図11は図1のB部の動作状態を示す斜視図、図12は図1のB部の駆動状態を示す斜視図、図13は角速度検出回路図である。 1 is a perspective view of a composite sensor without a case according to an embodiment of the present invention, FIG. 2 is a perspective view of a portion A in FIG. 1, FIG. 3 is a cross-sectional view taken along line AA in FIG. FIG. 5 is a cross-sectional view taken along the line AA in FIG. 4, FIG. 6 is a cross-sectional view taken along the line BB in FIG. 4, and FIG. 7 is a perspective view showing a driving state and an operating state of the part A in FIG. FIG. 8 is an acceleration detection circuit diagram, FIG. 9 is a waveform diagram of a drive signal when driving the first vibration element, FIG. 10 is a perspective view showing a drive state of the B part of FIG. 1, and FIG. FIG. 12 is a perspective view showing an operating state, FIG. 12 is a perspective view showing a driving state of a portion B in FIG. 1, and FIG. 13 is an angular velocity detection circuit diagram.
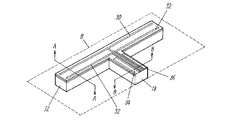
図1〜図3において、本発明の一実施の形態におけるケース未装着の複合センサは、角速度センサと加速度センサを有する複合センサであって、基板実装用の2つの支軸部2を有する固定基部4と、この2つの支軸部2の間に連結するとともに、外周縁から2つの支軸部2の間に向かって溝6を設けた2つの錘部8と、一方の錘部8に一端を連結するとともに、他方の錘部8に他端を連結した2つの第1振動素子10と、錘部8に設けた溝6の底部に一端を連結した2つの第2振動素子12と、信号処理回路が搭載され固定基部4の2つの支軸部2を取り付け支持した基板14とを備えている。そして、第1振動素子10および前記第2振動素子12を互いに駆動振動させ、錘部8の可動に起因して変化する第1振動素子10の駆動振動を検知して加速度を検出するとともに、コリオリ力に起因して変化する第2振動素子12の屈曲振動を検知して角速度を検出している。
1 to 3, the composite sensor without a case in one embodiment of the present invention is a composite sensor having an angular velocity sensor and an acceleration sensor, and a fixed base having two
この第1振動素子10は3つの線条体16を併設したスリット形状とし、第2振動素子12は互いに略直交させ連結した第1アーム18と第2アーム20とを有するT形状としており、2つの錘部8、2つの第1振動素子10、2つの第2振動素子12は、互いに固定基部4に対して対向配置するとともに、2つの第1振動素子10、2つの第2振動素子12は、2つの第1振動素子10と固定基部4とを結ぶ直線と、2つの第2振動素子12と固定基部4とを結ぶ直線とが略直交になるように配置している。このような配置により、互いに略直交したX軸とY軸とZ軸において、2つの第1振動素子10をX軸上に配置するとともに2つの第2振動素子12をY軸上に配置すると、2つの錘部8はX軸に対して線対称に配置される。
The
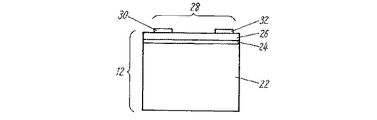
第1振動素子10において、3つの線条体16の2つには、駆動振動を与えるための駆動電極を配置し、残りの1つには駆動振動を検知する検出電極を配置し、共に、シリコン板22の上にPtの下部電極24を高周波スパッタにて形成し、この下部電極24の上部に高周波スパッタにてPZT圧電体26を形成し、さらに、上部にAu蒸着で上部電極28を形成している。この駆動電極に対して、下部電極24と上部電極28にシリコンが共振する共振周波数の交流電圧を印加すると、PZT圧電体26の伸縮が生じ、2つの線条体16が駆動振動する。線条体16が駆動振動する際は、3つの線条体16が互いに影響し合うので、検出電極を配置した線条体16から駆動振動を検知する。
In the first vibrating
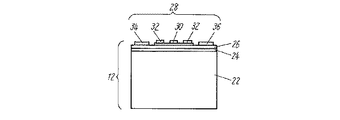
また、図4〜図6において、第2振動素子12には,第1振動素子10と同様に、駆動振動を与えるための駆動電極を配置し、さらに、角速度に起因する屈曲振動を検出するための検出電極を配置している。第1アーム18には、駆動負電極30を2つの駆動正電極32で挟むように、駆動正電極32および駆動負電極30を配置するとともに、これら、駆動正電極32と駆動負電極30を挟むように、検出正電極34と検出負電極36を配置している。第2アーム20には、第1アーム18に配置した駆動負電極30をT形状に配置し、駆動正電極32をL形状に配置している。2つの駆動正電極32の内、一方の駆動正電極32は駆動振動をモニタするモニタ正電極とし、駆動負電極30をモニタ負電極として共用してもよい。
4 to 6, similarly to the
この第2振動素子12は、シリコン板22の上にPtの下部電極24を高周波スパッタにて形成し、この下部電極24の上部に高周波スパッタにてPZT圧電体26を形成し、さらに、上部にAu蒸着で上部電極28を形成している。上部電極28は駆動正電極32と駆動負電極30からなり、シリコンが共振する共振周波数の交流電圧を印加すると、駆動正電極32側と駆動負電極30側の各々において、PZT圧電体26の伸縮が生じ、第2アーム20が駆動振動する。
In the second
次に、第1振動素子10の駆動振動と加速度が生じた場合の動作について説明する。
Next, an operation when drive vibration and acceleration of the
図7に示すように、第1振動素子10を矢印方向に互いに駆動振動させる。第1振動素子10は、3つの線条体16の内、隣接する線条体16の駆動方向を互いに逆方向にしており、線条体16をZ軸の(+Z)方向と(−Z)方向とに交互に繰り返すように駆動振動させる。この駆動振動をさせた状態で、錘部8の可動に起因して変化する第1振動素子10の駆動振動を検知して加速度を検出する。
As shown in FIG. 7, the first
例えば、図1、図7に示すように、X軸の(−X)方向側へ加速度が生じる(2つの錘部8がX軸の(+X)方向へ可動しようとする)と、(+X)方向側の第1振動素子10には矢印方向(A)に圧縮応力が生じる。このとき、(−X)方向側の第1振動素子10には、逆に引張応力が生じる。
For example, as shown in FIGS. 1 and 7, when acceleration occurs in the (−X) direction side of the X axis (the two
また、X軸の(+X)方向側へ加速度が生じる(2つの錘部8がX軸の(−X)方向へ可動しようとする)と、(+X)方向側の第1振動素子10には矢印方向(B)に引張応力が生じる。このとき、(−X)方向側の第1振動素子10には、逆に圧縮応力が生じる。
Further, when acceleration occurs in the (+ X) direction side of the X axis (the two
2つの第1振動素子10には、錘部8の可動に応じて互いに異なる張力が加わり、2つの第1振動素子10の固有共振周波数が、錘部8の可動前の状態と比較すると変化する(一方の第1振動素子10の駆動振動波の周波数が高くなり、他方の第1振動素子10の駆動振動波の周波数が低くなる)ので、この固有共振周波数の差を検知すれば加速度を検出することができる。
Different tensions are applied to the two
また、2つの第1振動素子10の駆動振動波の位相が、錘部8の可動前の状態と比較すると変化する(−方の第1振動素子10の駆動振動波の位相が進み、他方の第1振動素子10の駆動振動波の位相が遅れる)ので、この駆動振動波の差を検知しても加速度を検出することができる。
In addition, the phase of the drive vibration wave of the two
上記の加速度を検出する際、例えば、図8に示すような加速度検出回路を用い、2つの第1振動素子10の駆動振動波に基づく各々の駆動信号を同期検波して検出する。この加速度検出回路の第1振動素子10には、抵抗38、増幅器40、バンドパスフィルタ42、AGC回路44、同期検波回路46、ローパスフィルタ48とを接続しており、第1振動素子10の共振周波数の変化に起因する位相差を検出して加速度を検出する。このとき、図9に示すように、錘部8の可動前における駆動信号の駆動信号波を駆動信号波Aとすると、錘部8の可動後における駆動信号の駆動信号波は、一方の第1振動素子10に対応するものは位相が遅れて駆動信号波Bとなり、他方の第1振動素子10に対応するものは位相が進んで駆動信号波Cとなる。
When detecting the acceleration, for example, an acceleration detection circuit as shown in FIG. 8 is used to detect and detect the respective drive signals based on the drive vibration waves of the two
次に、第2振動素子12の駆動振動と角速度が生じた場合の動作について説明する。
Next, the operation when the drive vibration and the angular velocity of the
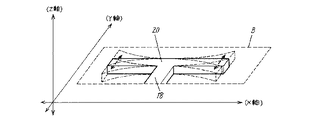
図10に示すように、第2振動素子12は、第2アーム20の両端を互いにY軸の(+Y)方向と(−Y)方向とに交互に繰り返すように駆動振動させる。この駆動振動をさせた状態で、コリオリ力に起因して変化する第2振動素子12の屈曲振動を検知して角速度を検出する。第2振動素子12に屈曲振動が生じると、シリコン板22に形成したPZT圧電体26が歪み、検出正電極34と検出負電極36に電荷が発生するのでこれを検知する。
As shown in FIG. 10, the second vibrating
例えば、図11に示すように、X軸周りに角速度が生じると、Z軸方向への第1アーム18の屈曲振動を検知して角速度を検出する。第2アーム20は全体がZ軸の(+Z)方向と(−Z)方向とに交互に繰り返すように屈曲振動するので、第1アーム18もそれに伴いZ軸の(+Z)方向と(−Z)方向とに交互に繰り返すように屈曲振動する。
For example, as shown in FIG. 11, when an angular velocity is generated around the X axis, the angular velocity is detected by detecting the bending vibration of the
例えば、図12に示すように、Z軸周りに角速度が生じると、X軸方向への第1アーム18の屈曲振動を検知して角速度を検出する。第2アーム20は全体がX軸の(+X)方向と(−X)方向とに交互に繰り返すように屈曲振動するので、第1アーム18もそれに伴いX軸の(+X)方向と(−X)方向とに交互に繰り返すように屈曲振動する。
For example, as shown in FIG. 12, when an angular velocity occurs around the Z-axis, the angular velocity is detected by detecting the bending vibration of the
上記の角速度を検出する際、例えば、図13に示すような角速度検出回路を用い、2つの第2振動素子12の屈曲振動波に基づく各々の屈曲信号を同期検波して検出する。この角速度検出回路の第2振動素子12には、抵抗38、増幅器40、バンドパスフィルタ42、AGC回路44、同期検波回路46、ローパスフィルタ48とを接続しており、第2振動素子12の固有共振周波数の差、または、駆動振動波の位相差を検出して角速度を検出する。
When the angular velocity is detected, for example, an angular velocity detection circuit as shown in FIG. 13 is used to detect and detect the respective bending signals based on the bending vibration waves of the two second vibrating
上記構成により、固定基部4に連結した2つの錘部8と、一方の錘部8に一端を連結するとともに、他方の錘部8に他端を連結した第1振動素子10と、錘部8に一端を連結した第2振動素子12とを設け、これら第1振動素子10および第2振動素子12を互いに駆動振動させるので、加速度センサとしては、錘部8の可動に起因して変化する第1振動素子10の駆動振動を検知して加速度を検出することができ、角速度センサとしては、第2振動素子12の屈曲振動を検知して角速度を検出することができる。すなわち、角速度センサと加速度センサとを複合でき、実装面積を低減して実装基板14の小型化を図ることができる。
With the above configuration, the two
加速度の検出に当っては、第1振動素子10の駆動振動における固有共振周波数の差、
または、2つの第1振動素子10の駆動振動における駆動振動波の位相差を検知すれば、容易に精度良く検出できる。このとき、第1振動子は複数の線条体16を併設したスリット形状とし、隣接する線条体16を互いに逆方向に駆動振動させれば、感度が増幅して非常に精度良く検出できる。特に、外周縁から固定基部4に向かって溝6を有し、この溝6の底部に第2振動素子12を連結すれば、第2振動素子12の駆動振動と屈曲振動に影響を与えることなく、第1振動素子10の感度をさらに増幅することができる。
In detecting the acceleration, the difference in natural resonance frequency in the drive vibration of the
Or if the phase difference of the drive vibration wave in the drive vibration of the two
角速度の検出に当っては、第2振動子は互いに略直交させ連結した第1アーム18と第2アーム20とを有するT形状とし、第1アーム18を錘部8に連結し、第2アーム20を駆動振動させることにより、2軸方向の角速度を検出できるとともに低背化できる。
In detecting the angular velocity, the second vibrator has a T shape having a
また、2つの第1振動素子10を固定基部4に対して対向配置し、2つの第1振動素子10と固定基部4とを一直線上に配置しているので、第1振動素子10の駆動に起因したノイズを抑制するとともに、2つの第2振動素子12を固定基部4に対して対向配置し、2つの第2振動素子12と固定基部4とを一直線上に配置しているので、第2振動素子12の駆動に起因したノイズを抑制し、加速度と角速度をより精度良く検出できる。特に、2つの第1振動素子10と固定基部4とを結ぶ直線と、2つの第2振動素子12と固定基部4とを結ぶ直線とを略直交させているので、対称形状となり、第1振動素子10および第2振動素子12の駆動に起因したノイズをより抑制できる。
Further, since the two
さらに、固定基部4は、基板14実装用の2つの支軸部2を有し、この支軸部2の間に錘部8を連結すれば、基板14に固定基部4を的確に実装できるとともに、錘部8の可動に起因したノイズを抑制できる。
Further, the fixed base 4 has two
以上のように、本発明にかかる複合センサは、航空機、自動車、ロボット、船舶、車両等の移動体の姿勢制御やナビゲーション等、各種電子機器に用いることができる。 As described above, the composite sensor according to the present invention can be used for various electronic devices such as attitude control and navigation of moving bodies such as aircraft, automobiles, robots, ships, and vehicles.
2 支軸部
4 固定基部
6 溝
8 錘部
10 第1振動素子
12 第2振動素子
14 基板
16 線条体
18 第1アーム
20 第2アーム
22 シリコン板
24 下部電極
26 PZT圧電体
28 上部電極
30 駆動負電極
32 駆動正電極
34 検出正電極
36 検出負電極
38 抵抗
40 増幅器
42 バンドパスフィルタ
44 AGC回路
46 同期検波回路
48 ローパスフィルタ
2 Supporting shaft portion 4 Fixed base portion 6
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005040145A JP2006226802A (en) | 2005-02-17 | 2005-02-17 | Compound sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005040145A JP2006226802A (en) | 2005-02-17 | 2005-02-17 | Compound sensor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006226802A true JP2006226802A (en) | 2006-08-31 |
Family
ID=36988315
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005040145A Pending JP2006226802A (en) | 2005-02-17 | 2005-02-17 | Compound sensor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006226802A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008070230A (en) * | 2006-09-14 | 2008-03-27 | Hitachi Ltd | Physical quantity sensor |
| JP2008175578A (en) * | 2007-01-16 | 2008-07-31 | Nec Tokin Corp | Vibrator for piezoelectric vibrating gyroscope |
| JP2016530612A (en) * | 2013-07-17 | 2016-09-29 | シュタビロ インターナツィオナール ゲーエムベーハーSTABILO International GmbH | Electronic pen |
-
2005
- 2005-02-17 JP JP2005040145A patent/JP2006226802A/en active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008070230A (en) * | 2006-09-14 | 2008-03-27 | Hitachi Ltd | Physical quantity sensor |
| JP2008175578A (en) * | 2007-01-16 | 2008-07-31 | Nec Tokin Corp | Vibrator for piezoelectric vibrating gyroscope |
| JP2016530612A (en) * | 2013-07-17 | 2016-09-29 | シュタビロ インターナツィオナール ゲーエムベーハーSTABILO International GmbH | Electronic pen |
| US10474252B2 (en) | 2013-07-17 | 2019-11-12 | Stabilo International Gmbh | Electronic pen |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5205725B2 (en) | Angular velocity sensor | |
| JP5206409B2 (en) | Angular velocity sensor | |
| JP5205970B2 (en) | Inertial force sensor | |
| JP4929918B2 (en) | Compound sensor | |
| JP2007256235A (en) | Inertia force sensor | |
| JP2008076265A (en) | Inertial force sensor | |
| JP2012149961A (en) | Vibration gyro | |
| JP2006226802A (en) | Compound sensor | |
| JPWO2010092806A1 (en) | Inertial force sensor and detection element used therefor | |
| JP4687085B2 (en) | Compound sensor | |
| JP2006162314A (en) | Compound sensor | |
| JP4774733B2 (en) | Compound sensor | |
| JP2008122263A (en) | Angular velocity sensor | |
| JP2008190972A (en) | Angular velocity sensor | |
| JP2007256234A (en) | Inertia force sensor | |
| JP5125138B2 (en) | Compound sensor | |
| JP4858215B2 (en) | Compound sensor | |
| JP2010230346A (en) | Angular velocity sensor | |
| JP2008046056A (en) | Angular velocity sensor | |
| JP2007198778A (en) | Inertial force sensor | |
| JP2008122262A (en) | Angular velocity sensor | |
| JP2007198779A (en) | Inertial force sensor | |
| JP2008190887A (en) | Sensor | |
| JP2006105756A (en) | Angular velocity sensor | |
| JP2007198776A (en) | Inertia force sensor |