JP2004200440A - 基板保持システム - Google Patents
基板保持システム Download PDFInfo
- Publication number
- JP2004200440A JP2004200440A JP2002367690A JP2002367690A JP2004200440A JP 2004200440 A JP2004200440 A JP 2004200440A JP 2002367690 A JP2002367690 A JP 2002367690A JP 2002367690 A JP2002367690 A JP 2002367690A JP 2004200440 A JP2004200440 A JP 2004200440A
- Authority
- JP
- Japan
- Prior art keywords
- vacuum
- substrate holding
- power supply
- vacuum pump
- ejector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000000758 substrate Substances 0.000 title claims abstract description 59
- 230000007246 mechanism Effects 0.000 claims abstract description 30
- 230000005856 abnormality Effects 0.000 claims description 4
- 239000004065 semiconductor Substances 0.000 abstract description 40
- 235000012431 wafers Nutrition 0.000 description 37
- 238000000227 grinding Methods 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 238000004140 cleaning Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000004075 alteration Effects 0.000 description 2
- 238000001035 drying Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000007664 blowing Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
Images



Abstract
【課題】装置を複雑化及び大型化させることなく,真空ポンプの電源が突然に遮断された場合であっても,半導体ウェハを保持するための真空を供給する基板保持システムを提供する。
【解決手段】真空吸着により基板を保持する基板保持機構402,404,406と,前記基板保持機構402,404,406に真空を提供する真空ポンプ100と,前記真空ポンプ100の駆動電力を供給する電源と,外部から供給される空気により真空を発生させる真空エジェクタ200と,前記電源の出力が正常である場合に,前記真空ポンプ100を前記基板保持機構402,404,406に真空を提供する真空発生源とし,かつ前記電源の出力に異常が発生した場合に,前記真空エジェクタ200を前記基板保持機構402,404,406に真空を提供する真空発生源とする真空発生源切り替え手段300,302と,を具備する。
【選択図】 図1
【解決手段】真空吸着により基板を保持する基板保持機構402,404,406と,前記基板保持機構402,404,406に真空を提供する真空ポンプ100と,前記真空ポンプ100の駆動電力を供給する電源と,外部から供給される空気により真空を発生させる真空エジェクタ200と,前記電源の出力が正常である場合に,前記真空ポンプ100を前記基板保持機構402,404,406に真空を提供する真空発生源とし,かつ前記電源の出力に異常が発生した場合に,前記真空エジェクタ200を前記基板保持機構402,404,406に真空を提供する真空発生源とする真空発生源切り替え手段300,302と,を具備する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は,基板保持システムに関し,さらに詳細には,半導体素子製造工程において,半導体ウェハを真空吸着保持するための基板保持システムに関する。
【0002】
【従来の技術】
一般に,半導体素子の製造工程で使用される各種装置においては,半導体ウェハを真空吸着保持する基板保持システムが採用されている。半導体ウェハの研削装置を例に挙げれば,半導体ウェハは,例えば搬送アームの搬送パッド,チャックテーブル,及びスピンナーテーブルなどの基板保持機構により固定され又は搬送される。この基板保持機構は,少なくとも1つの真空ポンプが形成した真空が,真空ポンプと連通された各配管を介して基板保持機構に提供されて,半導体ウェハを真空吸着固定する。また,当然ながら,半導体ウェハの研削装置以外の各種装置においても,半導体ウェハを真空吸着により固定して又は搬送する基板保持機構が採用されている。
【0003】
しかしながら,通常の真空ポンプ装置は,電源を必要とする摺動部を有しているため,例えば停電などの理由により電源供給が突然に停止した場合には,真空ポンプが作動しなくなってしまう。この結果,従来の真空吸着保持システムでは,真空ポンプの電源が突然に遮断されてしまうと半導体ウェハを真空吸着保持することができずに,半導体ウェハが落下して破壊又は破損してしまう,という問題があった。
【0004】
このような事態を防止するために,装置内に別途のバックアップ電源とバックアップ用真空ポンプを設置する方法が開示されている(例えば,特許文献1参照)。上記方法では,メインの真空ポンプが突然に停止した場合であっても,バックアップ用の真空ポンプが半導体ウェハを保持するための真空を提供することができる。
【0005】
【特許文献1】
特許第3208000号公報
【0006】
【発明が解決しようとする課題】
しかしながら,上記従来の方法では,研削装置内にメインの真空ポンプとメイン電源が設置されているにもかかわらず,さらに新たなバックアップ電源とバックアップ用真空ポンプとを設置しなければならない。このため,研削装置が複雑化,大型化するばかりでなく,生産コストも上昇する,という問題がある。
【0007】
したがって,本発明の目的は,装置を複雑化及び大型化させることなく,真空ポンプの電源が突然に遮断された場合であっても,半導体ウェハを保持するための真空を供給することが可能な新規かつ改良された基板保持システムを提供することにある。
【0008】
【課題を解決するための手段】
上記課題を解決するため,本発明の第1の観点においては,真空吸着により基板を保持する基板保持機構と,前記基板保持機構に真空を提供する真空ポンプと,前記真空ポンプに駆動電力を供給する電源と,外部から供給される空気により真空を発生させる真空エジェクタと,前記基板保持機構に真空を提供する真空発生源を,前記電源の出力が正常である場合には前記真空ポンプとし,前記電源の出力に異常が発生した場合には前記真空エジェクタとするように切り替える真空発生源切り替え手段と,を具備する,ことを特徴とする基板保持システムが提供される。
【0009】
上記記載の発明では,停電などの理由により電源が突然に遮断された場合には,基板保持機構に対する真空発生源が真空ポンプから真空エジェクタに切り替わるので,半導体ウェハを真空保持した状態を常に維持することができる。さらに,新たなバックアップ電源及び真空ポンプを使用しないので,装置を簡易化,及び小型化でき,生産コストの低減を図ることができる。
【0010】
また,前記真空発生源切り替え手段は,前記真空ポンプと前記基板保持機構とを連通する第1の配管に設けられた第1のバルブと,前記真空エジェクタと前記基板保持機構とを連通する第2の配管に設けられた第2のバルブとから構成されると共に,前記電源の出力が正常である場合には,前記第1のバルブが開放され,かつ前記第2のバルブが閉鎖され,及び,前記電源の出力に異常が発生した場合には,前記第1のバルブが閉鎖され,かつ前記第2のバルブが開放される,如く構成することができる。
【0011】
また,前記第1のバルブ及び前記第2のバルブは,ソレノイドバルブである,如く構成すれば,電源が突然に遮断された場合であっても,真空発生源を真空ポンプから真空エジェクタに自動的に切り替えることができる。
【0012】
【発明の実施の形態】
以下に添付図面を参照しながら,本発明の好適な実施の形態について詳細に説明する。なお,本明細書及び図面において,実質的に同一の機能構成を有する構成要素については,同一の符号を付することにより重複説明を省略する。
【0013】
(第1の実施の形態)
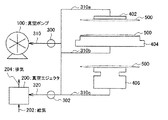
まず,図1に基づいて,本実施形態にかかる基板保持システムの概略構成について説明する。なお,図1は,本実施形態にかかる基板保持システムの概略構成を示す説明図である。また,本実施形態においては,基板保持システムを半導体ウェハの研削装置に採用した例により説明する。
【0014】
本実施形態にかかる基板保持システムは,図1に示すように,真空ポンプ100と,複数の基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,及びスピンナーテーブル406など)とが,第1の配管310を介して真空ポンプ100と連結されると共に,第2の配管320を介して真空エジェクタ200とも連結されている。さらに,真空ポンプ100に連結される第1の配管310には,第1のソレノイドバルブ300が設置されており,第1の配管310から分岐されて真空エジェクタ200に連結される第2の配管320には,第2のソレノイドバルブ302が設けられている。
【0015】
なお,搬送アームは,カセット内(図示せず)に収容された半導体ウェハ500が,ベルトコンベアによって1枚ずつ搬出された後,半導体ウェハ500を水平回転させて,待機領域に移送する装置である。この搬送アームの先端には,吸気作用によって半導体ウェハ500を真空吸着により固定する搬送パッド402が設けられている。また,研削装置のチャックテーブル404に搬送する際,洗浄及び乾燥するためのスピンナーテーブル406に搬送する際,カセット内(図示せず)に再び搬入する際などにも各々の搬送アームが使用される。
【0016】
チャックテーブル404は,半導体ウェハ500の裏面を研削するために,半導体ウェハ500の回路形成面(表面)を真空吸着により固定する装置である。なお,かかる研削工程では,半導体ウェハ500の裏面は,第1の回転砥石(図示せず)で粗研削された後,第2の回転砥石(図示せず)により仕上げ研削される。
【0017】
スピンナーテーブル406は,研削された半導体ウェハ500をスピン洗浄した後,エアーを吹き付けてスピン乾燥するために,真空吸着によって固定する装置である。なお,スピン洗浄及びスピン乾燥は,スピンナーテーブル406の側部に配設された洗浄水供給ノズル(図示せず)又はエアー供給ノズル(図示せず)から供給された洗浄水又はエアーにより行われる。
【0018】
このような真空吸着の原理は,半導体ウェハの吸着面側に大気圧よりも低い圧力状態(負圧)を形成することにより,半導体ウェハの他面側が大気圧により押圧されて基板保持機構に固定される,というものである。また,かかる真空吸着力は,半導体ウェハの作用面に対して垂直方向に働き,その大きさは,半導体ウェハの吸着面側とその他面側との圧力差,及び真空吸着力が作用する作用面積とが主要因となっている。従って,このような圧力差が大きくなる程,又は作用面積が大きくなる程,半導体ウェハの真空吸着力は大きくなる。
【0019】
上記構成の基板保持システムにおいて,通常の状態では,真空ポンプ100が基板保持機構(搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)の真空発生源とするために,第1のソレノイドバルブ300は開放され,かつ第2のソレノイドバルブ302は閉鎖されている。
【0020】
一方,停電などの理由により電源が突然に遮断された場合には,第1のソレノイドバルブ300及び第2のソレノイドバルブ302への通電が停止されるので,第1のソレノイドバルブ300が閉鎖されると同時に,第2のソレノイドバルブ302が開放される。したがって,真空ポンプ100に連通する第1の配管310が閉鎖され,真空エジェクタ200に連通する第2の配管320が開放されて,真空エジェクタ200が真空発生源となるように自動的に切り替えられる。
【0021】
このように,本実施形態においては,電源が必要な摺動部を有する真空ポンプ装置は,電源が遮断すると停止してしまうが,摺動部を有しない(即ち,電源を必要としない)真空エジェクタは,電源が遮断されても装置外部から供給された空気(例えば圧縮空気)などにより真空を発生させることができる。したがって,例えば停電などの理由により電源が突然に遮断された場合には,真空ポンプ100に代えて,真空エジェクタ200を基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)に対する真空発生源とすることができる。
【0022】
次に,図2〜図4に基づいて,本実施形態にかかる基板保持システムの動作方法について説明する。なお,図2は,本実施形態にかかる基板保持システムの動作方法を示すフローチャートである。
【0023】
まず,ステップS100で,通常の状態では,基板保持機構の半導体ウェハは,真空ポンプにより真空吸引されて固定又は搬送されている(ステップS100)。かかる基板保持システムの通常の状態を,図3に基づいて,より詳細に説明する。
【0024】
本実施形態にかかる基板保持システムは,より詳細に図3に示すように,真空ポンプ100と,基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)とが,第1の配管310を介して真空ポンプ100と連結されている。例えば搬送アームの搬送パッド402と接続された第1の配管310aと,チャックテーブル404と接続された第1の配管310bと,スピンナーテーブル406と接続された第1の配管310cとが連結されて第1の配管310を形成し,当該第1の配管310は真空ポンプ100と連結されている。さらに,第1の配管310には,第1のソレノイドバルブ300及びマニホールド600が接続されている。本実施形態にかかる真空吸着システムにおいては,通常の状態では,第1のソレノイドバルブ300は開放されている。
【0025】
一方,搬送アームの搬送パッド402と接続された第1の配管310aからは,第2の配管320aが分岐されて真空エジェクタ200aと接続されている。スピンナーテーブル404と接続された第1の配管310bからは,第2の配管320bが分岐されて真空エジェクタ200bと接続されている。チャックテーブル406と接続された第1の配管310cからは,第2の配管320cが分岐されて真空エジェクタ200cと接続されている。また,当該第2の配管320a,320b,320cには,3つの基板保持機構402,404,406に対応するように,第2のソレノイドバルブ302a,302b,302cが設置されており,通常状態では,第2のソレノイドバルブ302a,302b,302cは閉鎖されている。
【0026】
また,各真空エジェクタ200a,200b,200cは,給気配管202a,202b,202cから供給された圧縮空気により真空を発生させる装置である。この給気配管202には,第3のソレノイドバルブ304及びマニホールド602が接続されており,第3のソレノイドバルブ304は,通常状態では閉鎖されており,圧縮空気の供給が停止されている。
【0027】
本実施形態にかかる真空吸着システムにおいては,通常の状態では,第1のソレノイドバルブ300は開放され,かつ第2のソレノイドバルブ302a,302b,302cは閉鎖されているので,図3中の実線で示すように,真空ポンプ100が基板保持機構402,404,406に対する真空発生源となっている。
【0028】
次に,ステップS102で,停電などの理由により真空ポンプへの電源が停止すると(ステップS102),ステップS104で,基板保持システムの真空発生源が真空ポンプから真空エジェクタに切り替えられる(ステップS104)。かかる基板保持システムの電源遮断時の状態を,図4に基づいて,より詳細に説明する。
【0029】
図4に示すように,停電などの理由により電源が突然に遮断されると,第1のソレノイドバルブ300の通電が停止するので第1のソレノイドバルブ300は閉鎖される。同時に,第2のソレノイドバルブ302a,302b,302cへの通電も停止されるので,第2のソレノイドバルブ302a,302b,302cは開放される。さらに,第3のソレノイドバルブ304への通電も停止されるので,第3のソレノイドバルブ304が開放されて,圧縮空気が真空エジェクタ202a,202b,202cに供給される。この圧縮空気は,各真空エジェクタ200a,200b,200cで真空を発生させ後,排気配管204a,204b,204cからマニホールド600cを介して排気配管204により排気される。
【0030】
したがって,停電などの理由により電源が突然に遮断した場合には,真空ポンプ100に連結される第1の配管310が閉鎖され,真空エジェクタ202a,202b,202cに連結される第2の配管320が開放される。したがって,真空エジェクタ202a,202b,202cを基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)に対する真空発生源とすることができる。
【0031】
このことにより,ステップS406で,半導体ウェハ500が基板保持機構から落下することなく,真空吸着状態が維持される(ステップS406)。
【0032】
なお,真空ポンプ100が停止してから真空発生源を真空エジェクタ200に切り換えるまでの間に,時間的な遅れが発生する。しかしながら,真空ポンプ100が停止した場合であっても,第1の配管310a,310b,310cの真空状態は,少なくとも数秒程度の間は維持されているので,半導体ウェハ500の真空吸着状態を維持したまま真空発生源を真空エジェクタ200a,200b,200cに切り替えることができる。また,搬送アームの搬送パッド402においては,その下面に半導体ウェハ500が吸着されているが,通常は,半導体ウェハ500の表面が水で濡れているので,その表面張力と真空エジェクタ200aによる真空吸着力との合力により半導体ウェハ500の搬送パッド402への吸着が維持されるので落下することはない。
【0033】
本実施形態においては,通常運転時には真空発生源として真空ポンプを使用し,電源遮断時(例えば停電時)には,真空発生源が真空エジェクタに自動的に切り替わるので,基板保持機構は,例えば停電前の真空吸着力を維持し続けることとなる。この結果,半導体ウェハは例えば停電時でも落下することなく基板保持機構に真空吸着固定した状態を維持することができる。
【0034】
なお,通常運転時には,真空エジェクタを使用するのは好ましくない。これは,真空エジェクタは一般的に真空吸引力が弱いため,多数の真空エジェクタを使用しなければならないからである。即ち,真空エジェクタは電源や電気配線が不要となるという利点があるが,多数の真空エジェクタを使用すると生産コストが増加してしまう。このため,真空エジェクタは,緊急時における半導体ウェハの落下防止を維持できる程度の真空度を維持するために使用し,通常運転時は,真空ポンプを使用するのが好ましい。
【0035】
以上,本発明に係る好適な実施の形態について説明したが,本発明はかかる構成に限定されない。当業者であれば,特許請求の範囲に記載された技術思想の範囲内において,各種の修正例および変更例を想定し得るものであり,それらの修正例および変更例についても本発明の技術範囲に包含されるものと了解される。
【0036】
例えば,上記実施形態においては,基板保持システムを半導体ウェハの研削装置に採用した構成を例に挙げて説明したが,かかる例には限定されない。半導体ウェハを真空吸着するための真空吸着手段を有するいかなる装置でも適用することができる。
【0037】
また,上記実施形態においては,停電により真空ポンプの電源が停止する構成を例に挙げて説明したがかかる例には限定されない。例えば,停電時以外でも装置配線の短絡又は断線など,真空ポンプへの電源供給が突然停止した場合が想定される他のいかなる原因でも実施することができる。
【0038】
【発明の効果】
停電などの理由により電源が突然遮断された場合には,基板保持機構に対する真空発生源が真空ポンプから真空エジェクタに切り替わるので,半導体ウェハの真空保持状態を維持することができる。さらに,新たなバックアップ電源及び真空ポンプを使用しないので,装置を簡易化,及び小型化でき,生産コストの低減を図ることができる。
【図面の簡単な説明】
【図1】第1の実施の形態にかかる基板保持システムの概略構成を示す説明図である。
【図2】第1の実施の形態にかかる基板保持システムの動作方法を示すフローチャートである。
【図3】第1の実施の形態にかかる基板保持システムの正常時の動作状態を示す詳細図である。
【図4】第1の実施の形態にかかる基板保持システムの電源遮断時の動作状態を示す詳細図である。
【符号の説明】
100 真空ポンプ
200 真空エジェクタ
202 給気配管
204 排気配管
300 第1のソレノイドバルブ
302 第2のソレノイドバルブ
304 第3のソレノイドバルブ
310 第1の配管
320 第2の配管
402 搬送アームの搬送パッド
404 チャックテーブル
406 スピンナーテーブル
【発明の属する技術分野】
本発明は,基板保持システムに関し,さらに詳細には,半導体素子製造工程において,半導体ウェハを真空吸着保持するための基板保持システムに関する。
【0002】
【従来の技術】
一般に,半導体素子の製造工程で使用される各種装置においては,半導体ウェハを真空吸着保持する基板保持システムが採用されている。半導体ウェハの研削装置を例に挙げれば,半導体ウェハは,例えば搬送アームの搬送パッド,チャックテーブル,及びスピンナーテーブルなどの基板保持機構により固定され又は搬送される。この基板保持機構は,少なくとも1つの真空ポンプが形成した真空が,真空ポンプと連通された各配管を介して基板保持機構に提供されて,半導体ウェハを真空吸着固定する。また,当然ながら,半導体ウェハの研削装置以外の各種装置においても,半導体ウェハを真空吸着により固定して又は搬送する基板保持機構が採用されている。
【0003】
しかしながら,通常の真空ポンプ装置は,電源を必要とする摺動部を有しているため,例えば停電などの理由により電源供給が突然に停止した場合には,真空ポンプが作動しなくなってしまう。この結果,従来の真空吸着保持システムでは,真空ポンプの電源が突然に遮断されてしまうと半導体ウェハを真空吸着保持することができずに,半導体ウェハが落下して破壊又は破損してしまう,という問題があった。
【0004】
このような事態を防止するために,装置内に別途のバックアップ電源とバックアップ用真空ポンプを設置する方法が開示されている(例えば,特許文献1参照)。上記方法では,メインの真空ポンプが突然に停止した場合であっても,バックアップ用の真空ポンプが半導体ウェハを保持するための真空を提供することができる。
【0005】
【特許文献1】
特許第3208000号公報
【0006】
【発明が解決しようとする課題】
しかしながら,上記従来の方法では,研削装置内にメインの真空ポンプとメイン電源が設置されているにもかかわらず,さらに新たなバックアップ電源とバックアップ用真空ポンプとを設置しなければならない。このため,研削装置が複雑化,大型化するばかりでなく,生産コストも上昇する,という問題がある。
【0007】
したがって,本発明の目的は,装置を複雑化及び大型化させることなく,真空ポンプの電源が突然に遮断された場合であっても,半導体ウェハを保持するための真空を供給することが可能な新規かつ改良された基板保持システムを提供することにある。
【0008】
【課題を解決するための手段】
上記課題を解決するため,本発明の第1の観点においては,真空吸着により基板を保持する基板保持機構と,前記基板保持機構に真空を提供する真空ポンプと,前記真空ポンプに駆動電力を供給する電源と,外部から供給される空気により真空を発生させる真空エジェクタと,前記基板保持機構に真空を提供する真空発生源を,前記電源の出力が正常である場合には前記真空ポンプとし,前記電源の出力に異常が発生した場合には前記真空エジェクタとするように切り替える真空発生源切り替え手段と,を具備する,ことを特徴とする基板保持システムが提供される。
【0009】
上記記載の発明では,停電などの理由により電源が突然に遮断された場合には,基板保持機構に対する真空発生源が真空ポンプから真空エジェクタに切り替わるので,半導体ウェハを真空保持した状態を常に維持することができる。さらに,新たなバックアップ電源及び真空ポンプを使用しないので,装置を簡易化,及び小型化でき,生産コストの低減を図ることができる。
【0010】
また,前記真空発生源切り替え手段は,前記真空ポンプと前記基板保持機構とを連通する第1の配管に設けられた第1のバルブと,前記真空エジェクタと前記基板保持機構とを連通する第2の配管に設けられた第2のバルブとから構成されると共に,前記電源の出力が正常である場合には,前記第1のバルブが開放され,かつ前記第2のバルブが閉鎖され,及び,前記電源の出力に異常が発生した場合には,前記第1のバルブが閉鎖され,かつ前記第2のバルブが開放される,如く構成することができる。
【0011】
また,前記第1のバルブ及び前記第2のバルブは,ソレノイドバルブである,如く構成すれば,電源が突然に遮断された場合であっても,真空発生源を真空ポンプから真空エジェクタに自動的に切り替えることができる。
【0012】
【発明の実施の形態】
以下に添付図面を参照しながら,本発明の好適な実施の形態について詳細に説明する。なお,本明細書及び図面において,実質的に同一の機能構成を有する構成要素については,同一の符号を付することにより重複説明を省略する。
【0013】
(第1の実施の形態)
まず,図1に基づいて,本実施形態にかかる基板保持システムの概略構成について説明する。なお,図1は,本実施形態にかかる基板保持システムの概略構成を示す説明図である。また,本実施形態においては,基板保持システムを半導体ウェハの研削装置に採用した例により説明する。
【0014】
本実施形態にかかる基板保持システムは,図1に示すように,真空ポンプ100と,複数の基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,及びスピンナーテーブル406など)とが,第1の配管310を介して真空ポンプ100と連結されると共に,第2の配管320を介して真空エジェクタ200とも連結されている。さらに,真空ポンプ100に連結される第1の配管310には,第1のソレノイドバルブ300が設置されており,第1の配管310から分岐されて真空エジェクタ200に連結される第2の配管320には,第2のソレノイドバルブ302が設けられている。
【0015】
なお,搬送アームは,カセット内(図示せず)に収容された半導体ウェハ500が,ベルトコンベアによって1枚ずつ搬出された後,半導体ウェハ500を水平回転させて,待機領域に移送する装置である。この搬送アームの先端には,吸気作用によって半導体ウェハ500を真空吸着により固定する搬送パッド402が設けられている。また,研削装置のチャックテーブル404に搬送する際,洗浄及び乾燥するためのスピンナーテーブル406に搬送する際,カセット内(図示せず)に再び搬入する際などにも各々の搬送アームが使用される。
【0016】
チャックテーブル404は,半導体ウェハ500の裏面を研削するために,半導体ウェハ500の回路形成面(表面)を真空吸着により固定する装置である。なお,かかる研削工程では,半導体ウェハ500の裏面は,第1の回転砥石(図示せず)で粗研削された後,第2の回転砥石(図示せず)により仕上げ研削される。
【0017】
スピンナーテーブル406は,研削された半導体ウェハ500をスピン洗浄した後,エアーを吹き付けてスピン乾燥するために,真空吸着によって固定する装置である。なお,スピン洗浄及びスピン乾燥は,スピンナーテーブル406の側部に配設された洗浄水供給ノズル(図示せず)又はエアー供給ノズル(図示せず)から供給された洗浄水又はエアーにより行われる。
【0018】
このような真空吸着の原理は,半導体ウェハの吸着面側に大気圧よりも低い圧力状態(負圧)を形成することにより,半導体ウェハの他面側が大気圧により押圧されて基板保持機構に固定される,というものである。また,かかる真空吸着力は,半導体ウェハの作用面に対して垂直方向に働き,その大きさは,半導体ウェハの吸着面側とその他面側との圧力差,及び真空吸着力が作用する作用面積とが主要因となっている。従って,このような圧力差が大きくなる程,又は作用面積が大きくなる程,半導体ウェハの真空吸着力は大きくなる。
【0019】
上記構成の基板保持システムにおいて,通常の状態では,真空ポンプ100が基板保持機構(搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)の真空発生源とするために,第1のソレノイドバルブ300は開放され,かつ第2のソレノイドバルブ302は閉鎖されている。
【0020】
一方,停電などの理由により電源が突然に遮断された場合には,第1のソレノイドバルブ300及び第2のソレノイドバルブ302への通電が停止されるので,第1のソレノイドバルブ300が閉鎖されると同時に,第2のソレノイドバルブ302が開放される。したがって,真空ポンプ100に連通する第1の配管310が閉鎖され,真空エジェクタ200に連通する第2の配管320が開放されて,真空エジェクタ200が真空発生源となるように自動的に切り替えられる。
【0021】
このように,本実施形態においては,電源が必要な摺動部を有する真空ポンプ装置は,電源が遮断すると停止してしまうが,摺動部を有しない(即ち,電源を必要としない)真空エジェクタは,電源が遮断されても装置外部から供給された空気(例えば圧縮空気)などにより真空を発生させることができる。したがって,例えば停電などの理由により電源が突然に遮断された場合には,真空ポンプ100に代えて,真空エジェクタ200を基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)に対する真空発生源とすることができる。
【0022】
次に,図2〜図4に基づいて,本実施形態にかかる基板保持システムの動作方法について説明する。なお,図2は,本実施形態にかかる基板保持システムの動作方法を示すフローチャートである。
【0023】
まず,ステップS100で,通常の状態では,基板保持機構の半導体ウェハは,真空ポンプにより真空吸引されて固定又は搬送されている(ステップS100)。かかる基板保持システムの通常の状態を,図3に基づいて,より詳細に説明する。
【0024】
本実施形態にかかる基板保持システムは,より詳細に図3に示すように,真空ポンプ100と,基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)とが,第1の配管310を介して真空ポンプ100と連結されている。例えば搬送アームの搬送パッド402と接続された第1の配管310aと,チャックテーブル404と接続された第1の配管310bと,スピンナーテーブル406と接続された第1の配管310cとが連結されて第1の配管310を形成し,当該第1の配管310は真空ポンプ100と連結されている。さらに,第1の配管310には,第1のソレノイドバルブ300及びマニホールド600が接続されている。本実施形態にかかる真空吸着システムにおいては,通常の状態では,第1のソレノイドバルブ300は開放されている。
【0025】
一方,搬送アームの搬送パッド402と接続された第1の配管310aからは,第2の配管320aが分岐されて真空エジェクタ200aと接続されている。スピンナーテーブル404と接続された第1の配管310bからは,第2の配管320bが分岐されて真空エジェクタ200bと接続されている。チャックテーブル406と接続された第1の配管310cからは,第2の配管320cが分岐されて真空エジェクタ200cと接続されている。また,当該第2の配管320a,320b,320cには,3つの基板保持機構402,404,406に対応するように,第2のソレノイドバルブ302a,302b,302cが設置されており,通常状態では,第2のソレノイドバルブ302a,302b,302cは閉鎖されている。
【0026】
また,各真空エジェクタ200a,200b,200cは,給気配管202a,202b,202cから供給された圧縮空気により真空を発生させる装置である。この給気配管202には,第3のソレノイドバルブ304及びマニホールド602が接続されており,第3のソレノイドバルブ304は,通常状態では閉鎖されており,圧縮空気の供給が停止されている。
【0027】
本実施形態にかかる真空吸着システムにおいては,通常の状態では,第1のソレノイドバルブ300は開放され,かつ第2のソレノイドバルブ302a,302b,302cは閉鎖されているので,図3中の実線で示すように,真空ポンプ100が基板保持機構402,404,406に対する真空発生源となっている。
【0028】
次に,ステップS102で,停電などの理由により真空ポンプへの電源が停止すると(ステップS102),ステップS104で,基板保持システムの真空発生源が真空ポンプから真空エジェクタに切り替えられる(ステップS104)。かかる基板保持システムの電源遮断時の状態を,図4に基づいて,より詳細に説明する。
【0029】
図4に示すように,停電などの理由により電源が突然に遮断されると,第1のソレノイドバルブ300の通電が停止するので第1のソレノイドバルブ300は閉鎖される。同時に,第2のソレノイドバルブ302a,302b,302cへの通電も停止されるので,第2のソレノイドバルブ302a,302b,302cは開放される。さらに,第3のソレノイドバルブ304への通電も停止されるので,第3のソレノイドバルブ304が開放されて,圧縮空気が真空エジェクタ202a,202b,202cに供給される。この圧縮空気は,各真空エジェクタ200a,200b,200cで真空を発生させ後,排気配管204a,204b,204cからマニホールド600cを介して排気配管204により排気される。
【0030】
したがって,停電などの理由により電源が突然に遮断した場合には,真空ポンプ100に連結される第1の配管310が閉鎖され,真空エジェクタ202a,202b,202cに連結される第2の配管320が開放される。したがって,真空エジェクタ202a,202b,202cを基板保持機構(例えば搬送アームの搬送パッド402,チャックテーブル404,スピンナーテーブル406)に対する真空発生源とすることができる。
【0031】
このことにより,ステップS406で,半導体ウェハ500が基板保持機構から落下することなく,真空吸着状態が維持される(ステップS406)。
【0032】
なお,真空ポンプ100が停止してから真空発生源を真空エジェクタ200に切り換えるまでの間に,時間的な遅れが発生する。しかしながら,真空ポンプ100が停止した場合であっても,第1の配管310a,310b,310cの真空状態は,少なくとも数秒程度の間は維持されているので,半導体ウェハ500の真空吸着状態を維持したまま真空発生源を真空エジェクタ200a,200b,200cに切り替えることができる。また,搬送アームの搬送パッド402においては,その下面に半導体ウェハ500が吸着されているが,通常は,半導体ウェハ500の表面が水で濡れているので,その表面張力と真空エジェクタ200aによる真空吸着力との合力により半導体ウェハ500の搬送パッド402への吸着が維持されるので落下することはない。
【0033】
本実施形態においては,通常運転時には真空発生源として真空ポンプを使用し,電源遮断時(例えば停電時)には,真空発生源が真空エジェクタに自動的に切り替わるので,基板保持機構は,例えば停電前の真空吸着力を維持し続けることとなる。この結果,半導体ウェハは例えば停電時でも落下することなく基板保持機構に真空吸着固定した状態を維持することができる。
【0034】
なお,通常運転時には,真空エジェクタを使用するのは好ましくない。これは,真空エジェクタは一般的に真空吸引力が弱いため,多数の真空エジェクタを使用しなければならないからである。即ち,真空エジェクタは電源や電気配線が不要となるという利点があるが,多数の真空エジェクタを使用すると生産コストが増加してしまう。このため,真空エジェクタは,緊急時における半導体ウェハの落下防止を維持できる程度の真空度を維持するために使用し,通常運転時は,真空ポンプを使用するのが好ましい。
【0035】
以上,本発明に係る好適な実施の形態について説明したが,本発明はかかる構成に限定されない。当業者であれば,特許請求の範囲に記載された技術思想の範囲内において,各種の修正例および変更例を想定し得るものであり,それらの修正例および変更例についても本発明の技術範囲に包含されるものと了解される。
【0036】
例えば,上記実施形態においては,基板保持システムを半導体ウェハの研削装置に採用した構成を例に挙げて説明したが,かかる例には限定されない。半導体ウェハを真空吸着するための真空吸着手段を有するいかなる装置でも適用することができる。
【0037】
また,上記実施形態においては,停電により真空ポンプの電源が停止する構成を例に挙げて説明したがかかる例には限定されない。例えば,停電時以外でも装置配線の短絡又は断線など,真空ポンプへの電源供給が突然停止した場合が想定される他のいかなる原因でも実施することができる。
【0038】
【発明の効果】
停電などの理由により電源が突然遮断された場合には,基板保持機構に対する真空発生源が真空ポンプから真空エジェクタに切り替わるので,半導体ウェハの真空保持状態を維持することができる。さらに,新たなバックアップ電源及び真空ポンプを使用しないので,装置を簡易化,及び小型化でき,生産コストの低減を図ることができる。
【図面の簡単な説明】
【図1】第1の実施の形態にかかる基板保持システムの概略構成を示す説明図である。
【図2】第1の実施の形態にかかる基板保持システムの動作方法を示すフローチャートである。
【図3】第1の実施の形態にかかる基板保持システムの正常時の動作状態を示す詳細図である。
【図4】第1の実施の形態にかかる基板保持システムの電源遮断時の動作状態を示す詳細図である。
【符号の説明】
100 真空ポンプ
200 真空エジェクタ
202 給気配管
204 排気配管
300 第1のソレノイドバルブ
302 第2のソレノイドバルブ
304 第3のソレノイドバルブ
310 第1の配管
320 第2の配管
402 搬送アームの搬送パッド
404 チャックテーブル
406 スピンナーテーブル
Claims (3)
- 真空吸着により基板を保持する基板保持機構と,
前記基板保持機構に真空を提供する真空ポンプと,
前記真空ポンプに駆動電力を供給する電源と,
外部から供給される空気により真空を発生させる真空エジェクタと,
前記基板保持機構に真空を提供する真空発生源を,前記電源の出力が正常である場合には前記真空ポンプとし,前記電源の出力に異常が発生した場合には前記真空エジェクタとするように切り替える真空発生源切り替え手段と,を具備する,
ことを特徴とする基板保持システム。 - 前記真空発生源切り替え手段は,
前記真空ポンプと前記基板保持機構とを連通する第1の配管に設けられた第1のバルブと,前記真空エジェクタと前記基板保持機構とを連通する第2の配管に設けられた第2のバルブとから構成されると共に,
前記電源の出力が正常である場合には,前記第1のバルブが開放され,かつ前記第2のバルブが閉鎖され,及び,
前記電源の出力に異常が発生した場合には,前記第1のバルブが閉鎖され,かつ前記第2のバルブが開放される,
ことを特徴とする請求項1に記載の基板保持システム。 - 前記第1のバルブ及び前記第2のバルブは,ソレノイドバルブである,ことを特徴とする請求項2に記載の基板保持システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002367690A JP2004200440A (ja) | 2002-12-19 | 2002-12-19 | 基板保持システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002367690A JP2004200440A (ja) | 2002-12-19 | 2002-12-19 | 基板保持システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004200440A true JP2004200440A (ja) | 2004-07-15 |
Family
ID=32764498
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002367690A Pending JP2004200440A (ja) | 2002-12-19 | 2002-12-19 | 基板保持システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004200440A (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008078424A (ja) * | 2006-09-21 | 2008-04-03 | Disco Abrasive Syst Ltd | 切削装置 |
| JP2011067886A (ja) * | 2009-09-24 | 2011-04-07 | Disco Abrasive Syst Ltd | 被加工物保持装置 |
| JP2011155030A (ja) * | 2010-01-26 | 2011-08-11 | Disco Abrasive Syst Ltd | ウエーハ保持機構 |
| JP2011163451A (ja) * | 2010-02-10 | 2011-08-25 | Murata Mfg Co Ltd | 真空度切替方法 |
| JP2016174074A (ja) * | 2015-03-17 | 2016-09-29 | 株式会社東京精密 | 真空保持装置及びこれを用いた半導体ウェーハ研磨装置 |
| KR20170062377A (ko) | 2015-11-27 | 2017-06-07 | 가부시기가이샤 디스코 | 가공 장치 |
| KR20170143436A (ko) | 2016-06-21 | 2017-12-29 | 가부시기가이샤 디스코 | 피가공물의 유지 기구 및 가공 장치 |
| JP2019057618A (ja) * | 2017-09-21 | 2019-04-11 | 株式会社ディスコ | リングフレーム搬送機構 |
| KR20210144570A (ko) | 2020-05-22 | 2021-11-30 | 가부시기가이샤 디스코 | 피가공물의 유지 기구 및 가공 장치 |
-
2002
- 2002-12-19 JP JP2002367690A patent/JP2004200440A/ja active Pending
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008078424A (ja) * | 2006-09-21 | 2008-04-03 | Disco Abrasive Syst Ltd | 切削装置 |
| JP2011067886A (ja) * | 2009-09-24 | 2011-04-07 | Disco Abrasive Syst Ltd | 被加工物保持装置 |
| JP2011155030A (ja) * | 2010-01-26 | 2011-08-11 | Disco Abrasive Syst Ltd | ウエーハ保持機構 |
| JP2011163451A (ja) * | 2010-02-10 | 2011-08-25 | Murata Mfg Co Ltd | 真空度切替方法 |
| JP2016174074A (ja) * | 2015-03-17 | 2016-09-29 | 株式会社東京精密 | 真空保持装置及びこれを用いた半導体ウェーハ研磨装置 |
| KR20170062377A (ko) | 2015-11-27 | 2017-06-07 | 가부시기가이샤 디스코 | 가공 장치 |
| KR20170143436A (ko) | 2016-06-21 | 2017-12-29 | 가부시기가이샤 디스코 | 피가공물의 유지 기구 및 가공 장치 |
| JP2019057618A (ja) * | 2017-09-21 | 2019-04-11 | 株式会社ディスコ | リングフレーム搬送機構 |
| JP7015131B2 (ja) | 2017-09-21 | 2022-02-02 | 株式会社ディスコ | リングフレーム搬送機構 |
| KR20210144570A (ko) | 2020-05-22 | 2021-11-30 | 가부시기가이샤 디스코 | 피가공물의 유지 기구 및 가공 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3476536B1 (en) | Polishing apparatus | |
| JP2004200440A (ja) | 基板保持システム | |
| TW201811454A (zh) | 基板處理裝置 | |
| JP2010050436A (ja) | 基板処理装置および基板処理方法 | |
| JP2007005659A (ja) | 基板処理装置 | |
| US10926376B2 (en) | Method and apparatus for polishing a substrate, and method for processing a substrate | |
| WO2018180018A1 (ja) | 基板処理装置、基板処理方法およびプログラム記録媒体 | |
| JPH11274024A (ja) | 処理液供給装置及び処理液供給方法 | |
| JPH03273663A (ja) | 基板保持装置 | |
| US6629539B1 (en) | Sample processing system | |
| JP3642696B2 (ja) | 基板保持装置およびそれを用いた基板処理装置 | |
| JP2004083180A (ja) | シート状基板の搬送装置及び搬送方法 | |
| US9737973B2 (en) | Substrate processing apparatus | |
| JP2006229027A (ja) | ウェハ搬送装置 | |
| JP2004140058A (ja) | ウエハ搬送装置およびウエハ処理装置 | |
| JP3208000B2 (ja) | 基板保持システム | |
| JP3275303B2 (ja) | ダイシング装置 | |
| JP2004119488A (ja) | 真空吸着装置、基板搬送装置及び基板処理装置 | |
| JP2008294233A (ja) | 洗浄装置 | |
| JP4745099B2 (ja) | 基板処理装置、搬送ピックのクリーニング方法、制御プログラムおよびコンピュータ読取り可能な記憶媒体 | |
| US10008419B2 (en) | Separation method, computer storage medium, and separation system | |
| JP2020198389A (ja) | 基板処理装置及びその制御方法 | |
| JPH10256345A (ja) | 基板処理装置および基板搬送方法 | |
| KR102511267B1 (ko) | 기판 처리 장치, 기판 수용 용기의 덮개를 개폐하는 방법 | |
| JP2000183020A (ja) | 洗浄装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051017 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080627 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080708 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081104 |