Domaine technique de l'invention
-
La présente invention concerne un mouvement horloger dans lequel est incorporé un dispositif comprenant un élément rigide et un élément élastique accouplés.
-
En particulier, le dispositif est un mécanisme pour l'entrainement d'un indicateur par saut. L'élément rigide comprend un doigt d'entrainement pour entrainer l'indicateur sautant. L'élément élastique est un ressort comprenant une spire entre sa première extrémité et sa deuxième extrémité, la première extrémité étant solidaire en rotation d'une planche de roue et la deuxième extrémité portant un organe d'accouplement, lequel est inséré au moins partiellement dans un logement que présente l'élément rigide.
-
L'invention concerne également un procédé d'accouplement d'un élément rigide avec un élément élastique lors d'un assemblage d'un dispositif mécanique ou d'un montage de ce dernier dans un mouvement horloger, en particulier un mécanisme d'entrainement d'un indicateur sautant.
Arrière-plan technologique
-
Le document
EP 3828644 décrit un mécanisme d'entrainement d'un indicateur à saut semi-instantané comprenant un doigt-tambour et un ressort agencé dans ce tambour et accouplé à celui-ci, la première extrémité du ressort étant solidaire en rotation d'une planche de roue, entraineuse de cette première extrémité, et la deuxième extrémité portant un organe d'accouplement inséré partiellement dans un propre logement, c'est-à-dire un logement qui est agencé pour cet organe d'accouplement et destiné uniquement à cet organe d'accouplement, que présente le doigt-tambour, de manière mobile avec un jeu important.
-
Le mécanisme divulgué dans le document
EP 3828644 présente divers problèmes techniques. Premièrement, selon les figures, l'organe d'accouplement du ressort est agencé dans un logement peu profond duquel cet organe peut facilement ressortir. En effet, les deux surfaces latérales du logement sont parallèles selon une direction radiale passant par le milieu du logement, et l'organe d'accouplement présente deux flancs radiaux. La largeur angulaire de l'organe d'accouplement est prévue significativement inférieure à celle du logement pour permettre notamment à cet organe de pénétrer aisément dans le logement. Ainsi, un choc relativement faible peut facilement avoir pour conséquence que l'organe d'accouplement sort de son logement. Si tel est le cas, que ce soit lors d'un chargement du ressort avec le doigt en appui contre une dent de l'anneau des quantièmes ou avant un chargement de ce ressort, qui présente alors généralement une légère expansion due aux frottements qui s'exercent sur le tambour, l'organe d'accouplement sort à priori du côté du flanc radial d'entrainement du doigt. Dans une telle situation, la paroi latérale du tambour exerce une force radiale sur l'organe d'accouplement de sorte que ce dernier subit une force de frottement sur cette paroi latérale.
-
Si l'organe d'accouplement sort du logement lors d'un chargement du ressort en appui contre une dent de l'anneau des quantièmes, soit il glisse ensuite le long de la surface latérale intérieure et le saut de quantième n'aura pas lieu au moins jusqu'à ce que la roue d'entrainement ait fait un tour et que l'organe d'accouplement pénètre à nouveau dans son logement (cas le plus favorable qui a cependant pour conséquence la perte d'un affichage correct du quantième, lequel a manqué un saut journalier), soit la force de frottement est suffisante pour que le ressort se charge à nouveau en expansion, augmentant encore la force de frottement, jusqu'à ce que sa spire touche la paroi latérale et qu'un saut de quantième ait lieu à un moment indéterminé. Dans ce dernier cas, après le saut de quantième, le ressort va se détendre en entrainant le tambour et vraisemblablement l'organe d'accouplement subira un certain déplacement angulaire brusque le long de la paroi latérale. Cette situation se répétera au moins plusieurs jours avec des incrémentations du quantième à des moments indéterminés et variables. Quoiqu'il en soit, le mécanisme d'entrainement du quantième n'est plus fonctionnel dès que l'organe d'accouplement est sorti de son logement, événement fort probable pour le mécanisme représenté dans le document
EP 3828644 .
-
Ensuite, le mécanisme divulgué dans le document
EP 3828644 présente un problème important en lien avec le montage de ce mécanisme. Comme on peut le voir aux figures, l'espace intérieur cylindrique du doigt-tambour est circulaire avec le logement usiné en périphérie de cet espace intérieur cylindrique et circulaire. Étant donné que l'organe d'accouplement doit être inséré en partie dans le logement périphérique et demeurer dans ce logement en fonctionnement normal, ce ressort présente une distance radiale depuis le centre de l'anneau rigide, auquel est fixée la première extrémité du ressort, à la surface latérale extérieure de l'organe d'accouplement, lorsque le ressort est non contraint (c'est-à-dire détendu / au repos / dans sa position neutre), qui est supérieure au rayon dudit espace intérieur cylindrique circulaire. Une telle configuration du ressort pose un problème majeur pour l'assemblage du mécanisme, lequel est de petites dimensions (le ressort a généralement un diamètre inférieur à 4 mm). En effet, si on considère un mode d'assemblage envisageable dans lequel le ressort est dans un état détendu, le doigt-tambour et le ressort doivent être disposés, lors de leur apport sur la planche de roue, avec un positionnement angulaire relatif relativement précis dans lequel l'organe d'accouplement est sensiblement aligné sur le logement du doigt-tambour et introduit axialement dans ce logement.
-
Le positionnement angulaire relatif mentionné ci-avant n'est pas évident car le ressort est très petit. De plus, ce ressort n'est pas visible lorsque le doigt-tambour est placé sur la planche de roue pour permettre ensuite leur assemblage avec un moyeu qui présente un arbre introduit dans le trou oblong du doigt-tambour, le trou de l'anneau rigide et le trou central de la planche de roue depuis le côté du doigt-tambour (Fig. 5 du document). Des moyens techniques spécifiques ou des manipulations délicates de l'horloger doivent être prévus pour permettre un tel positionnement angulaire relatif. De plus, l'organe d'accouplement peut aisément ressortir du logement tant que l'arbre n'est pas introduit dans le trou de l'anneau rigide, ce trou n'étant alors plus aligné axialement avec le trou oblong du doigt-tambour, ce qui rend l'assemblage difficile car il faut donc réintroduire l'organe d'accouplement dans le logement. En sortant du logement, il est fort probable que l'organe d'accouplement subisse un déplacement angulaire relativement au logement de sorte que sa réintroduction devient aléatoire et pas certaine.
-
Dans le cas où l'organe d'accouplement n'est pas aligné avec le logement après l'apport du ressort et du doigt-tambour sur la planche de roue, l'alignement du trou de l'anneau rigide avec le trou de la planche de roue n'est pas possible sans contraindre le ressort. Mais on voit mal comment le ressort pourrait être contraint et maintenu contraint, avant l'introduction de l'arbre dans le trou de l'anneau rigide, une fois que le ressort est introduit dans l'espace intérieur du doigt-tambour et recouvert par celui-ci.
Résumé de l'invention
-
L'arrière-plan technologique montre un besoin dans le domaine horloger pour un dispositif, formé par un élément rigide et un élément élastique accouplés au moyen d'un organe d'accouplement qui est porté par l'élément élastique et inséré au moins partiellement dans un propre logement que présente l'élément rigide, qui soit configuré de manière à simplifier son assemblage ou son montage dans un mouvement horloger en relation avec l'accouplement de l'élément rigide avec l'élément élastique, et pour un procédé d'accouplement de l'élément rigide avec l'élément élastique, lors de l'assemblage ou du montage d'un tel dispositif, qui soit aisé à mettre en oeuvre.
-
Pour atteindre cet objectif, l'invention concerne un mouvement horloger comprenant un dispositif formé par un support, un élément rigide qui est mobile et un élément élastique qui est accouplé à cet élément rigide, l'élément élastique comprenant une première extrémité qui est solidaire en mouvement, au moins selon une première direction, du support et une deuxième extrémité portant un organe d'accouplement inséré au moins partiellement dans un propre logement que présente l'élément rigide. Le support, l'élément rigide et l'élément élastique sont agencés de manière que, lors de la formation du dispositif, ils peuvent être prémontés dans le mouvement horloger ou préassemblés dans un état intermédiaire dans lequel : - la première extrémité de l'élément élastique est solidaire en mouvement, selon la première direction, du support ; - l'élément rigide et le support avec l'élément élastique ont une position relative initiale, parmi une plage de positions relatives possibles, pour laquelle l'élément élastique est détendu ; et - l'organe d'accouplement est situé hors de son propre logement. L'élément rigide comprend une rampe de contrainte prévue pour l'élément élastique et située à proximité dudit propre logement, la rampe de contrainte étant agencée de manière que, au moins lors de l'assemblage du dispositif ou du montage du dispositif dans le mouvement horloger depuis ledit état intermédiaire, l'organe d'accouplement peut venir en appui contre la rampe de contrainte, par un mouvement relatif guidé entre l'élément rigide et le support selon la première direction, depuis ladite position relative initiale et ensuite suivre cette rampe de contrainte en s'approchant du propre logement alors que le mouvement relatif est poursuivi avec au moins une composante non nulle selon la première direction, la rampe de contrainte étant agencée de manière que, au cours de cette poursuite du mouvement relatif, l'organe d'accouplement subit un déplacement relativement au support, dont au moins une composante non nulle est selon une deuxième direction non parallèle à la première direction, et l'élément élastique est alors contraint. L'organe d'accouplement est configuré pour pouvoir, après avoir suivi la rampe de contrainte en s'approchant du propre logement, pénétrer au moins partiellement dans ce propre logement, alors que l'élément élastique subit au moins une détente partielle, et finalement occuper une position d'accouplement fonctionnelle dans laquelle il demeure lors de tout fonctionnement normal du mouvement horloger.
-
Selon une variante particulière, le dispositif est configuré de manière que l'élément élastique est sensiblement détendu, c'est-à-dire non contraint, une fois l'organe d'accouplement dans la position d'accouplement fonctionnelle suite à l'assemblage du dispositif ou du montage de ce dispositif dans le mouvement horloger.
-
Selon un mode de réalisation principal, ladite première direction est une direction angulaire relativement à un axe de rotation, définissant une rotation autour de cet axe, et ladite deuxième direction est une direction radiale, relativement audit axe de rotation, qui passe par un centre géométrique de l'organe d'accouplement.
-
Selon une variante générale, ladite plage de positions relatives possibles dans ledit état intermédiaire s'étend sur au moins 20°.
-
Selon une variante avantageuse, la plage de positions relatives possibles dans l'état intermédiaire s'étend sur au moins 45°, de préférence sur au moins 60°.
-
Selon un mode de réalisation particulier du mode de réalisation principal, le dispositif est un mécanisme pour l'entrainement d'un indicateur sautant, l'élément élastique étant un ressort comprenant une spire entre sa première extrémité et sa deuxième extrémité, ledit support étant une planche de roue qui est montée tournante autour dudit axe de rotation et qui est entraineuse de la première extrémité du ressort, l'élément rigide comprenant un doigt d'entrainement agencé pour entrainer l'indicateur sautant dans un sens d'entrainement donné.
-
Selon une variante avantageuse, la rampe de contrainte est agencée de sorte que, lorsque l'organe d'accouplement suit cette rampe de contrainte en s'approchant de son propre logement, l'organe d'accouplement subit un déplacement radial vers l'axe de rotation et la spire du ressort est alors contrainte.
-
L'invention concerne également un procédé d'accouplement d'un élément rigide avec un élément élastique lors d'un assemblage ou montage d'un dispositif destiné à former un mouvement, dans lequel l'élément élastique comprend une première extrémité, destinée à être assemblée avec un support que comporte le dispositif ou le mouvement horloger, et une deuxième extrémité portant un organe d'accouplement destiné à être assemblé avec l'élément rigide pour accoupler l'élément rigide avec l'élément élastique, l'élément rigide présentant un propre logement pour l'organe d'accouplement et une rampe de contrainte prévue pour guider l'élément élastique en le contraignant, lors du procédé d'accouplement, et située à proximité du propre logement. Le procédé d'accouplement comprend les étapes suivantes :
- Solidariser en mouvement, selon une première direction, la première extrémité de l'élément élastique avec le support ;
- Positionner le support avec l'élément élastique et l'élément rigide dans une position relative initiale, parmi une plage de positions relatives possibles pour lesquelles l'élément élastique est détendu, dans laquelle la rampe de contrainte se trouve entre l'organe d'accouplement et ledit propre logement de l'élément rigide et depuis laquelle l'élément rigide et le support peuvent subir, au moins pendant l'assemblage ou le montage du dispositif, un mouvement relatif guidé selon la première direction ; l'élément élastique avec l'organe d'accouplement et l'élément rigide étant configurés de manière que la rampe de contrainte croise une ligne géométrique passant par un point de contact de l'organe d'accouplement à la rampe de contrainte et parallèle à la première direction ;
et ensuite l'étape d'accouplement suivante :
- Appliquer un mouvement relatif guidé entre le support et l'élément rigide selon ladite première direction de sorte que l'organe d'accouplement vient en appui contre la rampe de contrainte, l'organe d'accouplement suivant ensuite cette rampe de contrainte alors que le mouvement relatif est poursuivi avec au moins une composante non nulle selon la première direction, la rampe de contrainte étant configurée pour engendrer, au cours de la poursuite du mouvement relatif, un déplacement de l'organe d'accouplement relativement au support, ayant au moins une composante non nulle selon une deuxième direction non parallèle à la première direction, tout en contraignant l'élément élastique ; le mouvement relatif étant poursuivi jusqu'à ce que l'organe d'accouplement pénètre au moins partiellement dans ledit propre logement, tandis que l'élément élastique subit au moins une détente partielle selon la deuxième direction, et occupe finalement une position d'accouplement fonctionnelle dans laquelle il demeure lors de tout fonctionnement normal du mouvement horloger ; l'organe d'accouplement et son propre logement étant configurés pour permettre à l'organe d'accouplement d'atteindre cette position d'accouplement fonctionnelle, lors de ladite détente au moins partielle de l'élément élastique, après avoir suivi la rampe de contrainte.
-
Selon un mode de mise en oeuvre particulier, le ressort, l'organe d'accouplement et la rampe de contrainte sont agencés de manière que, lors de l'étape d'accouplement, l'organe d'accouplement glisse, après avoir suivi la rampe de contrainte, sur une zone terminale de cette rampe de contrainte, lors dudit mouvement relatif, avant que l'organe d'accouplement atteigne ladite position d'accouplement fonctionnelle dans son propre logement.
-
Selon un mode de mise en oeuvre avantageux du procédé, la rampe de contrainte, le ressort et l'organe d'accouplement sont agencés de manière que, lorsque l'organe d'accouplement suit la rampe de contrainte en s'approchant de son propre logement, l'organe d'accouplement subit une rotation sur lui-même qui favorise ou qui permet une pénétration suivante de cet organe d'accouplement dans le propre logement, pour que l'organe d'accouplement puisse atteindre la position d'accouplement fonctionnelle.
-
Selon un autre mode de mise en oeuvre avantageux, la première direction est une direction angulaire relativement à un axe de rotation, définissant une rotation autour de cet axe, et la deuxième direction est une direction radiale, relativement audit axe de rotation, qui passe par un centre géométrique de l'organe d'accouplement, lequel subit ainsi un déplacement radial lorsqu'il suit la rampe de contrainte en s'approchant de son propre logement.
-
Dans d'autres modes de réalisation d'un mouvement horloger selon l'invention et d'autres modes de mise en oeuvre du procédé selon l'invention, un mouvement relatif guidé entre le support et l'élément rigide, jusqu'au contact de l'organe d'accouplement avec la rampe de contrainte, autre qu'une rotation est prévue. En d'autres termes, une première direction autre qu'une direction angulaire est prévue, notamment une direction linéaire. Des mouvements relatifs guidés plus complexes peuvent éventuellement être implémentés. On notera que, suite à l'intervention du contact entre l'organe d'accouplement et la rampe de contrainte, la poursuite du mouvement relatif, dans une deuxième phase du mouvement relatif, pour permettre à l'organe d'accouplement de gravir la rampe de contrainte peut être un mouvement relatif plus complexe qu'un mouvement linéaire ou une rotation intervenant, dans la première phase du mouvement relatif, avant que l'organe d'accouplement vienne en appui contre la rampe de contrainte, en particulier lorsque l'élément rigide subit un déplacement en réaction à une pression exercée par l'organe d'accouplement sur la rampe de contrainte.
-
Dans un mode de mise en oeuvre général, dans lequel l'élément rigide est formé par une plaquette ou est monté mobile en rotation sur une plaquette, le procédé comprend, avant l'étape d'accouplement, une étape initiale dans laquelle un moyeu comprenant un arbre et une tête, la planche de roue, le ressort muni à sa première extrémité d'une partie rigide centrale et la plaquette, respectivement la plaquette avec l'élément rigide monté sur cette plaquette sont apportés et positionnés de sorte que la planche de roue, le ressort et la plaquette, respectivement l'élément rigide sont dans une position relative correspondant angulairement à une dite position relative possible avec le ressort situé entre la planche de roue et la plaquette et la tête situé d'un côté opposé au ressort relativement à la plaquette ; et de sorte que l'arbre, un premier trou de la plaquette, un deuxième trou de la planche de roue et un troisième trou défini par la partie rigide centrale soient alignés sur ledit axe de rotation, le deuxième trou présentant un diamètre inférieur au premier trou et la tête étant au moins partiellement superposé à la plaquette ; et ensuite une étape d'assemblage incluant ladite étape de solidarisation et dans laquelle l'arbre est introduit à force dans le deuxième trou de la planche de roue en laissant la plaquette libre en rotation autour de l'arbre, la tête assurant finalement un maintien en position axiale de cette plaquette.
Brève description des figures
-
Les buts, avantages et caractéristiques de l'invention seront décrits ci-après de manière plus détaillée à l'aide des dessins annexés, donnés à titre d'exemples nullement limitatifs, dans lesquels :
- la Figure 1 est une vue de dessus d'un dispositif destiné à un mouvement horloger selon un premier mode de réalisation de l'invention ;
- la Figure 2 est une vue éclatée, en perspective, du dispositif de la Figure 1 ;
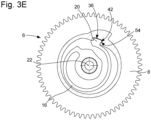
- les Figures 3A à 3E montrent un premier mode de mise en oeuvre d'un procédé d'accouplement, selon l'invention, d'un élément rigide avec un élément élastique lors d'un assemblage ou montage d'un dispositif mécanique destiné à former un mouvement horloger, pour obtenir dans ce premier mode le dispositif selon le premier mode de réalisation ;
- les Figures 4A et 4B montrent deux instants particuliers d'un mode de fonctionnement préféré du dispositif mécanique de la Figure 1 incorporé dans un mouvement horloger, dans lequel ce dispositif mécanique forme un dispositif d'entrainement d'un anneau des quantièmes ;
- la Figure 5 est une vue de dessus d'un dispositif destiné à un mouvement horloger selon un deuxième mode de réalisation de l'invention ;
- la Figure 6 est une vue éclatée, en perspective, du dispositif de la Figure 5 ;
- les Figures 7A à 7F montrent un deuxième mode de mise en oeuvre d'un procédé d'accouplement, selon l'invention, d'un élément rigide avec un élément élastique lors d'un assemblage ou montage d'un dispositif selon l'invention destiné à former un mouvement horloger selon le deuxième mode de réalisation (à noter que la plaquette 11 est représentée en transparence) ;
- les Figures 8A et 8B montrent deux instants particuliers d'un mode de fonctionnement préféré du dispositif mécanique, représenté à la Figure 5, incorporé dans un mouvement horloger dans lequel il forme un dispositif d'entrainement d'un anneau des quantièmes ;
- la Figure 9 montre le dispositif selon le deuxième mode de réalisation dans un état prémonté possible, lequel résulte d'un montage de ce dispositif au cours duquel une rotation relative entre la bascule et le support a été excessive.
Description détaillée de l'invention
-
En référence aux Figures 1 à 4B, on décrira un premier mode de réalisation d'un mouvement horloger 2 selon l'invention, lequel incorpore un dispositif d'entrainement d'un indicateur sautant, et un premier mode de mise en oeuvre d'un procédé d'accouplement d'un élément rigide avec un élément élastique lors d'un assemblage ou montage du dispositif.
-
Le dispositif 6 forme un mécanisme pour l'entrainement d'un indicateur sautant 4, en particulier par saut semi-instantané. Ce dispositif 6 comprend un support formé par une planche de roue 8, un élément rigide formant un doigt-tambour 10 et agencé au-dessus de la planche de roue, et un élément élastique formé par un ressort 16. Ce ressort comprend une première extrémité 17, une spire 18 et une deuxième extrémité 19. La planche de roue 8 présente un axe de rotation 22. Le doigt-tambour 10 définit un doigt d'entrainement 12 pour l'indicateur 4, lequel forme ici un anneau des quantièmes. Ce doigt-tambour présente un flanc d'entrainement 14 destiné à venir en contact avec une dent d'une denture 5 de l'indicateur pour effectuer l'entrainement de cet indicateur par saut. Le doigt-tambour est mobile en rotation relativement à la planche de roue 8 et guidé en rotation autour de l'axe de rotation 22 par un arbre 28, lequel présente un moyeu 26, traversant un trou oblong 34 que présente le doigt-tambour. La première extrémité 17 du ressort 16 est reliée à une partie rigide centrale 24 qui est solidaire en rotation de la planche de roue 8. De préférence, le ressort et la partie centrale forment une seule et même pièce.
-
Le doigt-tambour 10 est formé par une plaquette 30, qui s'étend au-dessus du ressort 16 et dans laquelle est usiné le trou oblong 34, et une paroi axiale 32 agencée en bordure de cette plaquette et qui s'abaisse vers la planche de roue 8, sur laquelle elle peut reposer dans une variante. Le doigt-tambour définit ainsi un espace intérieur 9 dans lequel est agencé le ressort. Une partie de la paroi axiale et une partie de la plaquette, qui lui est superposée, forment ensemble le doigt d'entrainement 12, lequel présente avantageusement une hauteur qui s'étend au moins du dessous du ressort à la surface supérieure de la plaquette 30. Dans une variante avantageuse, la planche de roue 8 et la partie rigide centrale 24 sont chassées sur l'arbre 28 du moyeu 26, lequel comprend en outre une tête 27 qui s'étend partiellement au-dessus de la plaquette 30 de manière à maintenir en position axiale le doigt-tambour 10.
-
La paroi axiale 32 présente, au niveau du doigt d'entrainement, un logement 36 qui a une ouverture latérale du côté du ressort 16, à savoir du côté de l'axe de rotation 22 du dispositif 6. La deuxième extrémité 19 du ressort est prolongée par un organe 20 d'accouplement à l'élément rigide 10 (à savoir ici le doigt-tambour), cet organe d'accouplement 20 étant configuré de manière à pouvoir pénétrer au moins partiellement dans le logement 36, lequel est un propre logement pour l'organe d'accouplement, par l'ouverture latérale et permettre au ressort de pouvoir ensuite appliquer un couple de force d'entrainement à l'élément rigide 10. Dans la variante décrite, l'organe d'accouplement 20 est rigide.
-
Selon une variante avantageuse, le logement 36 présente une surface latérale 54 orientée obliquement dans le sens de rotation 56 de la planche de roue 8, sens prévu pour un entrainement de l'indicateur, relativement à une direction radiale passant par le milieu de la surface latérale, et l'organe d'accouplement 20 présente un flanc latéral 52, en regard de la surface latérale, qui est aussi incliné obliquement dans le même sens que la surface latérale et qui appuie au moins partiellement contre la surface latérale lors de chaque chargement du ressort 16 pour l'entrainement de l'indicateur sautant par le mécanisme 6. L'organe d'accouplement 20 présente un nez 42, définissant le flanc latéral 52, qui est configuré pour s'insérer dans une forme complémentaire du logement 36 présentant sensiblement un même profil. Cette caractéristique particulière permet d'assurer un maintien précis de l'organe d'accouplement dans une position d'entrainement donnée à l'intérieur du logement dès que le ressort est mis sous tension lors d'un chargement, la surface latérale exerçant une force de réaction sur le nez 42 de l'organe d'accouplement avec une composante dirigée vers l'extérieur et donc vers le fond du propre logement 36. Ainsi, malgré la contraction subie par le ressort 16, le nez 42 reste dans une position d'entrainement donnée pour laquelle le rayon d'application de la force d'entrainement du ressort sur le doigt-tambour 10 demeure identique au cours du chargement du ressort et sensiblement maximal. Il résulte de cette caractéristique que le couple de force transmis est ainsi maximal pour une force d'entrainement déterminée du ressort lors de son chargement.
-
Selon une caractéristique particulière, l'organe d'accouplement 20 présente un talon arrière prévu pour bloquer une rotation de l'organe d'accouplement sur lui-même, une fois introduit dans son propre logement 36, dans le sens de rotation 56 de la planche de roue (sens de rotation prévu pour l'entrainement de l'indicateur). Ce talon arrière est prolongé par une surface de contact 46 qui vient en appui contre une butée angulaire 48 en fin de chargement du ressort 16, pour engendrer ensuite un saut de l'indicateur. De préférence, la butée angulaire 48 est située entre la première extrémité 17 du ressort et l'anneau rigide central 24, dans le prolongement angulaire de la spire 18 du ressort, et est définie par la seule et même pièce formant l'anneau rigide et le ressort.
-
En outre, dans une variante avantageuse, le logement présente une dimension minimale du côté de son ouverture qui est légèrement inférieure à une dimension maximale de l'organe d'accouplement perpendiculairement à la direction radiale, relativement à l'axe central de l'anneau rigide confondu à l'axe de rotation 22, avec le ressort dans un état détendu angulairement. Plus généralement, l'organe d'accouplement et son propre logement sont agencés de manière que l'organe d'accouplement ne peut pas ressortir du propre logement par au moins une translation relativement à la pièce rigide, c'est-à-dire sans subir au moins une rotation sur lui-même (rotation autour de son centre géométrique selon un axe parallèle à l'axe de rotation 22). Pour entrer dans le propre logement par l'ouverture latérale, l'organe d'accouplement doit donc effectuer une légère rotation sur lui-même, autour de son centre géométrique 21. Cette caractéristique assure qu'une fois l'organe d'accouplement inséré convenablement dans le propre logement et ainsi dans une position d'accouplement fonctionnelle, il risque très peu de ressortir du propre logement, bien que ceci n'est pas impossible dans des cas exceptionnels lors de chocs spécifiques. Une variante avantageuse du procédé d'accouplement selon l'invention effectue un accouplement avec la légère rotation de l'organe d'accouplement requise pour la variante décrite ici.
-
Une fois l'organe d'accouplement 20 assemblé au doigt-tambour 10, sans contraintes extérieures et notamment sans un choc, cet organe d'accouplement demeure normalement accouplé au doigt-tambour 10 en tout temps quel que soit l'état du dispositif 6, c'est-à-dire dans un état du ressort non contraint angulairement dans les périodes sans interaction entre la denture 5 de l'indicateur 4 et le doigt d'entrainement 12, dans un état où le ressort travaille en contraction lors d'un chargement de celui-ci avant un saut de l'indicateur, lors d'un saut de cet indicateur, et aussi lorsque le ressort est légèrement contraint en expansion notamment lorsque la planche de roue 8 est entrainée en rotation dans un sens de rotation opposé au sens prévu pour entrainer l'indicateur 4, afin d'effectuer une correction de l'heure en sens antihoraire. En conclusion, en fonctionnement normal du mouvement horloger 2, l'organe d'accouplement 20 demeure accouplé au doigt-tambour comme prévu, c'est-à-dire en place dans le propre logement 36, et ainsi solidaire du doigt-tambour. De manière générale, il est prévu que, une fois le mouvement horloger monté et terminé, l'organe d'accouplement occupe une position d'accouplement fonctionnelle dans laquelle il demeure lors de tout fonctionnement normal du mouvement horloger. On notera qu'en fonctionnement normal, il n'est pas prévu de chocs, engendrant de fortes accélérations, et que le mouvement horloger soit de manière générale soumis à de fortes accélérations.
-
On décrira ci-après un mode de mise en oeuvre général du procédé d'accouplement d'un élément rigide avec un élément élastique lors d'un assemblage ou montage d'un dispositif destiné à former un mouvement horloger. Ensuite, en référence aux Figures 3A à 3E, on décrira un premier mode de mise en oeuvre du procédé d'accouplement selon l'invention.
-
De manière générale, le procédé d'accouplement d'un élément rigide avec un élément élastique, lors d'un assemblage ou montage d'un dispositif destiné à former un mouvement horloger, concerne un élément élastique, notamment un ressort pouvant présenter diverses formes, comprenant une première extrémité, destinée à être assemblée avec un support, notamment une planche de roue, que comporte le dispositif ou le mouvement horloger, et une deuxième extrémité portant un organe d'accouplement, destiné à être assemblé avec l'élément rigide pour accoupler l'élément rigide avec l'élément élastique. L'élément rigide, notamment une bascule ou un doigt-tambour qui est agencé mobile relativement au support et sur lequel il est prévu d'exercer une force de rappel, présente un propre logement pour l'organe d'accouplement et une rampe de contrainte située à proximité du propre logement et prévue pour guider l'élément élastique en le contraignant momentanément lors du procédé d'accouplement.
-
Selon un mode de mise en oeuvre général, le procédé d'accouplement comprend les étapes suivantes :
- Solidariser en mouvement, selon une première direction, la première extrémité de l'élément élastique avec le support ;
- Positionner le support avec l'élément élastique et l'élément rigide dans une position relative initiale, parmi une plage de positions relatives possibles pour lesquelles l'élément élastique est détendu, dans laquelle la rampe de contrainte se trouve entre l'organe d'accouplement et ledit propre logement de l'élément rigide et depuis laquelle l'élément rigide et le support peuvent subir, au moins pendant l'assemblage ou le montage du dispositif, un mouvement relatif guidé selon la première direction ; l'élément élastique avec l'organe d'accouplement et l'élément rigide étant configurés de manière que la rampe de contrainte croise une direction géométrique passant par un point de contact de l'organe d'accouplement à la rampe de contrainte et parallèle à la première direction ;
et ensuite l'étape d'accouplement suivante :
- Appliquer un mouvement relatif guidé entre le support et l'élément rigide selon ladite première direction de sorte que l'organe d'accouplement vient en appui contre la rampe de contrainte, l'organe d'accouplement suivant ensuite cette rampe de contrainte alors que le mouvement relatif est poursuivi avec au moins une composante non nulle selon la première direction, la rampe de contrainte étant configurée pour engendrer, au cours de cette poursuite du mouvement relatif, un déplacement de l'organe d'accouplement relativement au support, ayant au moins une composante non nulle selon une deuxième direction non parallèle à la première direction, tout en contraignant l'élément élastique ; le mouvement relatif étant poursuivi jusqu'à ce que l'organe d'accouplement pénètre au moins partiellement dans ledit propre logement, tandis que l'élément élastique subit au moins une détente partielle selon la deuxième direction, et occupe finalement une position d'accouplement fonctionnelle dans laquelle l'organe d'accouplement demeure lors de tout fonctionnement normal du mouvement horloger ; l'organe d'accouplement et le propre logement étant configurés pour permettre à l'organe d'accouplement d'atteindre cette position d'accouplement fonctionnelle, lors de ladite détente au moins partielle de l'élément élastique, après avoir suivi la rampe de contrainte.
-
Dans le premier mode de mise en oeuvre d'un tel procédé, ladite première direction est une direction angulaire D1 relativement à l'axe de rotation 22, définissant une rotation autour de cet axe, et ladite deuxième direction est une direction radiale D2, relativement l'axe de rotation 22, qui passe par un centre géométrique 21 de l'organe d'accouplement, lequel subit ainsi un déplacement radial lorsqu'il suit la rampe de contrainte 40 en s'approchant de son propre logement 36. Le dispositif est un mécanisme 6 pour l'entrainement d'un indicateur sautant 4, l'élément élastique étant un ressort 16 comprenant une spire 18 entre sa première extrémité 17 et sa deuxième extrémité 19. Le support est une planche de roue 8 qui est entraineuse de la première extrémité du ressort 16 et définit l'axe de rotation 22. L'élément rigide 10 comprend un doigt d'entrainement 12 pour entrainer l'indicateur sautant dans un sens d'entrainement donné.
-
Dans le premier mode de mise en oeuvre du procédé d'accouplement, lequel est un cas particulier du mode de mise en oeuvre général, les étapes susmentionnées sont précisées, en référence aux figures 3A à 3E, de la manière suivante :
- Solidariser en rotation la première extrémité 17 du ressort 16 avec la planche de roue 8 ;
- Positionner (Figure 3A) la planche de roue 8 et l'élément rigide 10, formant notamment un doigt-tambour, dans une position relative initiale IRP, parmi une plage de positions angulaires relatives possibles P1(θ) pour lesquelles le ressort 16 est détendu, le ressort et l'élément rigide étant agencés de manière qu'une telle plage de positions angulaires relatives existe avec le ressort détendu ; la rampe de contrainte 40, dans la position relative initiale IRP, étant situé entre l'organe d'accouplement 20 et le logement 36 de l'élément rigide 10 ; l'élément rigide 10 et la planche de roue 8 étant capables de subir pendant l'assemblage ou le montage du mécanisme 6, depuis la position relative initiale IRP, un mouvement relatif guidé MR selon une direction angulaire D1 centré sur l'axe de rotation 22 ; le ressort 16 avec l'organe d'accouplement 20 et l'élément rigide 10 étant configurés de manière que la rampe de contrainte 40 croise une ligne géométrique L3 passant par un point de contact CP de l'organe d'accouplement et définissant un cercle ;
et ensuite l'étape d'accouplement suivante :
- Appliquer un mouvement relatif guidé MR entre la planche de roue 8 et l'élément rigide selon ladite direction angulaire D1 (Figures 3B à 3E) de sorte que l'organe d'accouplement 20 vient en appui contre la rampe de contrainte 40 (Figure 3B) et suit ensuite cette rampe de contrainte (Figure 3C), l'organe d'accouplement suivant ensuite cette rampe de contrainte alors que le mouvement relatif est poursuivi selon la direction angulaire D1, la rampe de contrainte 40 étant configurée pour engendrer, au cours de la poursuite du mouvement relatif, un déplacement de l'organe d'accouplement relativement à la planche de roue, ayant au moins une composante non nulle selon une direction radiale D2, tout en contraignant le ressort 16 ; le mouvement relatif étant poursuivi jusqu'à ce que l'organe d'accouplement pénètre au moins partiellement dans son propre logement 36 (Figure 3E), tandis que le ressort subit au moins une détente partielle, de préférence une détente totale selon la direction radiale, et que cet organe d'accouplement occupe finalement une position d'accouplement fonctionnelle dans laquelle il demeure lors de tout fonctionnement normal du mouvement horloger ; l'organe d'accouplement 20 et le propre logement 36 étant configurés pour permettre à l'organe d'accouplement d'atteindre la position d'accouplement fonctionnelle, lors de ladite détente de l'élément élastique, après avoir suivi la rampe de contrainte 40.
-
On remarquera que le ressort 16 est contraint en contraction lors du mouvement relatif MR prévu pour effectuer l'accouplement du ressort 16 avec l'élément rigide 10 via le propre logement 36 défini par cet élément rigide et l'organe d'accouplement 20 porté par la deuxième extrémité 19 du ressort, cet organe d'accouplement étant de préférence venu de matière avec le ressort et formant ainsi une même pièce avec ce ressort. L'anneau rigide central 24 est avantageusement également fixé à la première extrémité 17 du ressort de sorte à former une même pièce avec ce ressort. Ainsi, comme représenté aux figures, le ressort, l'organe d'accouplement et l'anneau rigide central sont formés par une seule et même pièce. De plus, le ressort 16 et l'anneau rigide 24 sont agencés de sorte à présenter, lorsque le ressort est détendu, un espace libre 38 dans lequel peut pénétrer l'organe d'accouplement 20 lorsque le ressort est contraint en contraction. Ceci est important pour le procédé d'accouplement, dans la variante représentée, et également pour le fonctionnement du mécanisme 6 lors de l'entrainement d'un indicateur 4, en particulier d'un anneau des quantièmes.
-
Comme ceci est montré aux Figures 4A et 4B (dans lesquelles le trou oblong 34 de la plaquette 30 est montré en trait interrompu), une fois le mécanisme 6 assemblé selon le procédé d'accouplement exposé ci-avant, et ce mécanisme monté dans le mouvement horloger 2 selon l'invention, il est prévu que la planche de roue 8 soit entrainée par le mécanisme d'affichage de l'heure dans le sens de rotation 56. Ainsi, l'élément rigide 10, formant un doigt-tambour comprenant un doigt d'entrainement 12, est entrainé en rotation par la planche de roue et, chaque jour avant minuit, le doigt d'entrainement 12 arrive en appui (Figure 4A) contre un flanc latéral d'une dent 5a d'une denture 5, que présente l'anneau des quantièmes. Ensuite, dans une première phase, le ressort 16 se charge par une contraction de sa spire 18 jusqu'à ce que la surface de contact 46 de l'organe d'accouplement arrive en appui contre la butée angulaire 48 (Figure 4B). Ensuite, rapidement après cet événement, le saut de l'anneau des quantièmes est déclenché. Dans une autre variante, le saut peut être déclenché avant que la surface de contact 46 arrive en appui contre la butée angulaire 48, cette dernière formant alors une butée de sécurité pour le ressort, de sorte qu'il ne puisse pas être détérioré.
-
Dans le premier mode de mise en oeuvre du procédé, la rampe de contrainte 40 est agencée en amont du logement 36 relativement au sens de rotation 56 de la planche de roue 8 lors de l'entrainement de l'indicateur sautant 4 par le mécanisme 6 dans le sens d'entrainement donné.
-
La forme particulière de l'organe d'accouplement 20, l'agencement du ressort 16 et la configuration de la rampe de contrainte 40 ont pour conséquence que, lors de l'étape d'accouplement, l'organe d'accouplement glisse, après avoir suivi la rampe de contrainte, sur une zone terminale de cette rampe de contrainte, lors dudit mouvement relatif guidé MR, avant la pénétration au moins partielle de l'organe d'accouplement 20 dans le propre logement 36 et l'occupation.de la position d'accouplement fonctionnelle par cet organe d'accouplement.
-
Selon une variante avantageuse, la rampe de contrainte 40, le ressort 16 et l'organe d'accouplement 20 sont agencés de manière que, lorsque l'organe d'accouplement suit la rampe de contrainte en s'approchant du propre logement 36, l'organe d'accouplement subit une rotation sur lui-même, c'est-à-dire qu'il tourne autour de son centre géométrique 21, qui favorise ou, dans une variante préférée, qui permet une pénétration suivante de cet organe d'accouplement dans le propre logement, pour que l'organe d'accouplement puisse atteindre la position d'accouplement fonctionnelle. Comme déjà exposé, cette variante est avantageuse, car elle permet de concevoir des formes complémentaires pour l'organe d'accouplement et le propre logement de manière que l'organe d'accouplement ne ressort en pratique plus du propre logement en cas de choc. La rotation de l'organe d'accouplement sur lui-même est obtenue, lors de l'assemblage du ressort à l'élément rigide définissant le propre logement, par le mouvement de rotation relatif entre l'élément rigide et le support (le doigt-tambour et la planche de roue) grâce à la rampe de contrainte 40 qui contraint le ressort 16 par un déplacement, ayant une composante principale qui est radiale, de l'organe d'accouplement 20 vers l'axe de rotation 22, engendrant la rotation de cet organe sur lui-même de manière suffisante pour permettre une orientation permettant son introduction dans le propre logement 36. Ceci est remarquable.
-
Comme on peut le voir à la Figure 3A, la plage de positions relatives possibles P1(θ) du ressort 16 dans un état détendu / non contraint, placé dans l'espace intérieur 9 du doigt-tambour 10 lors de l'assemblage ou du montage du mécanisme 6, dans ledit état intermédiaire s'étend sur environ 75°. Cette valeur correspond à une variante préférée, dans laquelle la plage de positions relatives possibles s'étend sur au moins 60°. Dans une variante générale, la plage de positions relatives possibles dans l'état intermédiaire s'étend sur au moins 20°, alors que dans une variante avantageuse, cette plage s'étend sur au moins 45°. La plage de positions relatives possibles P1(θ) dans l'état intermédiaire, avant le mouvement de rotation relatif pour effectuer l'accouplement, qui est relativement étendue est un bénéfice très avantageux de l'invention, car il est ainsi possible d'apporter le ressort et le doigt-tambour (l'élément rigide) sans nécessiter entre eux un positionnement initial précis. De plus, dans l'état intermédiaire, le ressort est détendu / non contraint de sorte que son apport et son placement initial en position axiale sont aisés et ne requièrent ni positionnement relatif initial précis, notamment pour avoir initialement l'organe d'accouplement en regard de son propre logement, ni de devoir contraindre le ressort dans cet état intermédiaire. Le ressort est contraint ensuite par la rampe de contrainte lors du mouvement relatif guidé MR prévu et l'introduction de l'organe d'accouplement dans son propre logement s'opère ensuite avec une détente au moins partielle du ressort, de sorte que cet organe demeure dans le propre logement en l'absence de contraintes extérieures. La partie terminale de la rampe de contrainte définit un bord du propre logement de l'organe d'accouplement, le bord opposé de ce propre logement étant avantageusement situé environ à une même distance radiale de l'axe de rotation 22.
-
Dans une variante particulière du procédé d'accouplement selon l'invention, l'élément rigide 10 est formé par une plaquette 30 ou est monté mobile en rotation sur une plaquette (cas en lien avec le deuxième mode de réalisation qui sera décrit par la suite). Le procédé d'accouplement comprend, avant l'étape d'accouplement, une étape initiale dans laquelle la planche de roue 8, le ressort 16 et la plaquette 30, en particulier le doigt-tambour 10 qui est formé en partie par cette plaquette 30 dans la variante représentée, sont apportés et positionnés dans ladite position relative initiale avec le ressort situé entre la planche de roue et la plaquette ; et ensuite il comprend une étape d'assemblage incluant ladite étape de solidarisation et dans laquelle le moyeu 26, comprenant un arbre 28 et une tête 27, est apporté du côté de la plaquette et l'arbre est introduit dans un premier trou 34 (le trou oblong dans la variante représentée) que présente cette plaquette, dans l'anneau rigide 24 auquel est fixée la première extrémité 17 du ressort et finalement dans un deuxième trou que présente la planche de roue 8, le deuxième trou étant dimensionné de sorte que l'arbre 28 est introduit à force dans ce deuxième trou alors que le premier trou 34 est dimensionné de sorte que la plaquette 30, et donc le doigt-tambour 10, est libre en rotation autour de l'arbre, et donc de l'axe de rotation 22, la tête 27 étant finalement au moins partiellement superposé à la plaquette, du côté opposé au ressort, de manière à assurer un maintien en position axiale de cette plaquette. Selon une caractéristique additionnelle optionnelle, l'anneau rigide central 24 présente un troisième trou qui est dimensionné de sorte que l'arbre est également introduit à force dans ce troisième trou pour solidariser la première extrémité du ressort avec la planche de roue. On notera que dans une autre variante, l'anneau rigide présente une partie saillante intérieure qui est insérer dans une cavité correspondante que comporte l'arbre du moyeu. Ainsi, l'anneau rigide et le ressort, plus particulièrement sa première extrémité 17, sont solidaire en rotation de la planche de roue 8, sans pour autant être fixé à celle-ci par l'intermédiaire de l'arbre.
-
Dans une variante avantageuse du procédé d'accouplement selon l'invention, l'étape initiale de la variante particulière décrite ci-avant est différente en ce que on apporte premièrement le moyeu, placé dans un posage, et ensuite on apporte le doigt-tambour en introduisant l'arbre du moyeu dans le trou oblong de ce doigt-tambour, ensuite on apporte le ressort avec son anneau rigide et l'organe d'accouplement et on place cet ensemble de sorte que le trou de l'anneau rigide soit positionné avec une partie terminale de l'arbre de moindre diamètre qui le traverse, cet anneau rigide étant maintenu ainsi temporairement au-dessus de l'espace intérieur 9 du doigt-tambour. Ensuite, la planche de roue est apportée et positionnée avec la partie terminale de l'arbre aussi introduite dans son trou central ou alignée avec ce trou central. Finalement, l'anneau rigide et la planche de roue sont chassées à force sur l'arbre en veillant à laisser libre en rotation le doigt-tambour. Le dispositif selon l'invention est ainsi dans ledit état intermédiaire.
-
La présente invention concerne le procédé d'accouplement avantageux entre un élément élastique et un élément rigide d'un dispositif du mouvement horloger, procédé décrit ci-avant, et également un mouvement horloger comportant un tel dispositif et agencé de manière à permettre la mise en oeuvre du procédé d'accouplement selon l'invention.
-
Ainsi, selon l'invention, un mode de réalisation général d'un mouvement horloger selon l'invention comprend un dispositif formé par un support, un élément rigide qui est mobile et un élément élastique qui est accouplé à cet élément rigide, l'élément élastique comprenant une première extrémité qui est solidaire en mouvement, au moins selon une première direction, du support et une deuxième extrémité portant un organe d'accouplement inséré au moins partiellement dans un propre logement que présente l'élément rigide. Le support, l'élément rigide et l'élément élastique sont agencés de manière que, lors de la formation du dispositif, ils peuvent être prémontés dans le mouvement horloger ou préassemblés dans un état intermédiaire dans lequel : - la première extrémité de l'élément élastique est solidaire en mouvement, selon la première direction, du support ; - l'élément rigide et le support avec l'élément élastique ont une position relative initiale, parmi une plage de positions relatives possibles, pour laquelle l'élément élastique est détendu ; et - l'organe d'accouplement est situé hors de son propre logement. L'élément rigide comprend une rampe de contrainte prévue pour l'élément élastique et située à proximité du propre logement, la rampe de contrainte étant agencée de manière que, au moins lors de l'assemblage du dispositif ou du montage du dispositif dans le mouvement horloger depuis ledit état intermédiaire, l'organe d'accouplement peut venir en appui contre la rampe de contrainte, par un mouvement relatif guidé entre l'élément rigide et le support selon la première direction, depuis ladite position relative initiale et ensuite suivre cette rampe de contrainte en s'approchant du propre logement alors que le mouvement relatif est poursuivi avec au moins une composante non nulle selon la première direction, la rampe de contrainte étant agencée de manière que, au cours de cette poursuite du mouvement relatif, l'organe d'accouplement subit un déplacement relativement au support, dont au moins une composante non nulle est selon une deuxième direction non parallèle à la première direction, et l'élément élastique est alors contraint. L'organe d'accouplement est configuré pour pouvoir, après avoir suivi la rampe de contrainte en s'approchant du propre logement, pénétrer au moins partiellement dans ce propre logement, alors que l'élément élastique subit au moins une détente partielle, et finalement occuper une position d'accouplement fonctionnelle dans laquelle il demeure lors de tout fonctionnement normal du mouvement horloger.
-
Selon une variante particulière, le ressort 16, l'organe d'accouplement 20 et la rampe de contrainte 40 sont agencés de manière que l'organe d'accouplement peut, après avoir suivi la rampe de contrainte en s'approchant de son propre logement, glisser sur une zone terminale de la rampe de contrainte, alors que ledit déplacement relatif est poursuivi, avant que l'organe d'accouplement atteigne ladite position d'accouplement fonctionnelle dans ledit propre logement.
-
Selon une variante principale, la première direction est une direction angulaire, relativement à un axe de rotation, définissant une rotation autour de cet axe, et la deuxième direction est une direction radiale, relativement audit axe de rotation, qui passe par un centre géométrique de l'organe d'accouplement.
-
Dans une variante générale, ladite plage de positions relatives possibles dans ledit état intermédiaire s'étend sur au moins 20°. Dans une variante avantageuse, ladite plage de positions relatives possibles dans ledit état intermédiaire s'étend sur au moins 45°, de préférence sur au moins 60°.
-
Selon le premier mode de réalisation et le deuxième mode de réalisation décrit par la suite, le dispositif est un mécanisme 6 pour l'entrainement d'un indicateur sautant 4, l'élément élastique étant un ressort 16 comprenant une spire 18 entre sa première extrémité 17 et sa deuxième extrémité 19, ledit support étant une planche de roue 8 qui est entraineuse de la première extrémité du ressort et qui définit ledit axe de rotation (l'axe de rotation 22), l'élément rigide (doigt-tambour ou bascule) comprenant un doigt d'entrainement 12 agencé pour pouvoir périodiquement effectuer l'entrainement de l'indicateur sautant dans un sens d'entrainement donné 50.
-
Selon une variante préférée du mouvement horloger, déjà exposée précédemment, la rampe de contrainte 40, le ressort 16 et l'organe d'accouplement 20 sont agencés de manière que, lorsque l'organe d'accouplement suit la rampe de contrainte en s'approchant du propre logement 36, l'organe d'accouplement peut subir une rotation sur lui-même qui favorise ou qui permet une pénétration suivante de cet organe d'accouplement dans ledit propre logement, pour que l'organe d'accouplement puisse atteindre finalement ladite position d'accouplement fonctionnelle.
-
Selon le premier mode de réalisation, dans le mouvement horloger 2, l'élément rigide 10 est formé par une plaquette 30 qui s'étend au-dessus du ressort, du côté opposé à la planche de roue 8, et par une paroi axiale 32 agencée en bordure de la plaquette et qui s'abaisse vers la planche de roue, au moins une partie de la paroi axiale et une partie de la plaquette qui lui est superposée formant ensemble le doigt d'entrainement 12. La plaquette présente un trou oblong et est guidée en rotation autour de l'axe de rotation 22, relativement à la planche de roue, par un arbre 28 fixé à cette planche de roue et traversant le trou oblong. La paroi axiale 32 définit le logement 36, lequel présente une ouverture latérale du côté du ressort (c'est-à-dire du côté de l'axe de rotation 22), l'organe d'accouplement 20 étant configuré de manière à pouvoir pénétrer au moins partiellement dans le propre logement 36 par l'ouverture latérale, pour atteindre finalement ladite position d'accouplement fonctionnelle dans laquelle il demeure lors de tout fonctionnement normal du mouvement horloger, et à permettre ensuite au ressort 16 d'appliquer un couple de force d'entrainement à l'élément rigide 10 et ainsi au doigt d'entrainement 12 d'effectuer l'entrainement de l'indicateur sautant 4.
-
Selon une variante avantageuse, l'organe d'accouplement présente, dans un plan général du ressort, une première forme et le logement présente dans ce plan général une deuxième forme avec une dimension de ladite ouverture latérale qui ne permet pas à l'organe d'accouplement de sortir du propre logement uniquement par au moins une translation.
-
Selon la variante avantageuse représentée du mécanisme 6 du mouvement horloger selon le premier mode de réalisation, la rampe de contrainte 40 est agencée en amont du logement 36 relativement à un sens de rotation 56 de la planche de roue 8 lors de l'entrainement de l'indicateur sautant 4 par le mécanisme 6 dans le sens d'entrainement donné 50, de sorte que ledit mouvement relatif entre l'élément rigide 10 et la planche de roue selon la direction angulaire D1 est effectué pour la planche de roue dans ledit sens de rotation de celle-ci.
-
Selon une variante préférée, le mécanisme 6 est agencé de manière que, si l'organe d'accouplement 20 sort éventuellement du propre logement 36 lors d'un choc ou d'une certaine forte accélération subie par le mouvement horloger 2, cet organe d'accouplement 20 ne peut occuper qu'une position de pré-accouplement en amont du propre logement 36 relativement au sens de rotation 56 de la planche de roue 8 lors de l'entrainement de l'indicateur sautant 4 par le mécanisme dans ledit sens d'entrainement donné 56. Le mécanisme est agencé de manière que l'organe d'accouplement peut revenir à ladite position d'accouplement fonctionnelle lors d'un entrainement en rotation de la planche de roue 8 par le mouvement horloger, dans ledit sens de rotation 56 de cette planche de roue, alors que le doigt d'entrainement est en appui contre une dent que comporte l'indicateur sautant. Cette variante préférée est remarquable car, dans le cas éventuel d'un choc spécifique qui engendrerait une sortie de l'organe d'accouplement 20 du propre logement 36, cet organe d'accouplement ne peut se trouver qu'en amont du propre logement, et dans la variante représentée avec la rampe de contrainte en amont, également en amont de cette rampe ou éventuellement en appui contre cette rampe. Cet état correspond à une situation de pré-accouplement automatique du ressort 16 et de l'élément rigide 10 (doigt-tambour), car la rotation de la planche de roue 8, lors du fonctionnement normal du mouvement horloger, va engendrer, dès que le doigt d'entrainement 12 arrive en appui contre une dent 5a de l'indicateur 4, un processus de ré-accouplement similaire à celui intervenant dans le procédé d'accouplement de l'invention. L'organe d'accouplement 20 gravit à nouveau la rampe de contrainte 40, glisse sur la zone terminale de cette rampe et subit éventuellement une certaine rotation sur lui-même (si prévue lors du procédé d'accouplement) et entre à nouveau dans le propre logement pour occuper finalement la position d'accouplement prévue avant que le ressort ne soit complètement chargé, c'est-à-dire avant le saut suivant prévu pour l'indicateur. Ainsi, le fait que l'organe d'accouplement 20 soit sorti de son propre logement, une fois le mouvement horloger 2 monté, n'a aucune répercussion négative sur l'entrainement de l'indicateur 4 par le mécanisme, aucun saut de l'indicateur n'étant manqué et le ré-accouplement intervenant de manière automatique.
-
Par la suite, on décrira un deuxième mode de réalisation d'un mouvement horloger selon l'invention. Les éléments ou références déjà décrits précédemment ne seront pas décrits à nouveau en détails.
-
Le mouvement horloger 62 selon le deuxième mode de réalisation se caractérise premièrement par le fait que l'élément rigide du mécanisme 60 est une bascule 66 qui est montée sur une plaquette 11, que comprend le mécanisme. La plaquette 11 présente un trou central circulaire 34A et est guidée en rotation, autour de l'axe de rotation 22 qui est un premier axe de rotation, relativement à la planche de roue 8 par l'arbre 28 auquel est fixée cette planche de roue. La bascule 66 est montée sur la plaquette 11 de manière à être mobile en rotation autour d'un deuxième axe de rotation 72 qui est distant du premier axe de rotation 22, le deuxième axe de rotation étant agencé à une première extrémité de la bascule. Plus particulièrement, la bascule est formée par un bras 67 comprenant à sa première extrémité un plot 74, inséré dans un trou correspondant de la plaquette 11 de manière à pouvoir pivoter autour du deuxième axe de rotation 72, et du côté de sa seconde extrémité un doigt d'entrainement 68 et une partie intérieure définissant un propre logement 76 pour un organe d'accouplement 70 et comprenant une partie avant 78 qui définit une rampe de contrainte 80 pour le ressort 16A (éléments qui seront décrits plus en détails par la suite). Le mécanisme 60 comprend encore une butée 90 qui est solidaire de la plaquette 11 et qui limite la rotation de la bascule 66 dans un premier sens de rotation correspondant à un éloignement radial du doigt d'entrainement relativement au premier axe de rotation 22.
-
Dans la variante représentée, la plaquette 11 présente une surface latérale dont une zone définit la butée 90, le doigt d'entrainement 68 étant agencé de manière qu'une portion supérieure arrière 92 de ce doigt peut venir en appui contre la butée 90, de sorte à être maintenu dans une position angulaire fixe relativement au deuxième axe de rotation et ainsi dans une position fixe relativement au premier axe de rotation, notamment lors d'un entrainement de l'indicateur 4 (Figures 8B) ou, dans le cadre de la présente invention, lorsque l'organe d'accouplement 70 suit ledit au moins un tronçon terminal de la rampe de contrainte 80 (Figures 7D et 7E), comme ceci sera encore exposé par la suite.
-
De manière générale, la rampe de contrainte 80 est agencée de manière que, lorsque l'organe d'accouplement 70 suit cette rampe de contrainte en s'approchant du propre logement 76, l'organe d'accouplement exerce sur la bascule 66 un couple de force dans le premier sens de rotation et l'organe d'accouplement 70 subit, au moins sur un tronçon terminal de la rampe de contrainte, un déplacement radial selon une direction radiale D2 vers le premier axe de rotation 22, alors que la bascule est en appui contre la butée 90 et le ressort 16A est contraint. À nouveau, la première extrémité 17 du ressort 16A est reliée à un anneau rigide central 24A alors que la deuxième extrémité 19 porte l'organe d'accouplement 70. Entre ces deux extrémités, le ressort comprend une spire 18A qui présente du côté de la deuxième extrémité une partie saillante intérieure 82, laquelle est destinée à stopper la contrainte en contraction du ressort, c'est-à-dire de sa spire 18A, lorsque le mécanisme 60 est monté dans le mouvement horloger 62 et fonctionne, comme ceci est montré aux Figures 8A et 8B, qui sont similaires aux Figures 4A et 4B relatives au premier mode de réalisation. Ces Figures 8A et 8B montrent le mécanisme 60 et l'anneau des quantièmes 4, comprenant une denture 5, lors d'un entrainement de cet anneau pour le passage à un quantième suivant à minuit, respectivement : - Au moment où le doigt d'entrainement 68 arrive en contact contre une dent 5a de l'anneau et où le ressort 16A est sensiblement détendu angulairement (à savoir non contraint angulairement) ; - En fin du chargement du ressort 16A lorsque la partie saillante intérieure 82 du ressort arrive en appui contre la butée angulaire 84, cette dernière étant agencé à la suite de la première extrémité 17 du ressort, entre cette première extrémité et l'anneau rigide 24A.
-
La plaquette 11 et la bascule 66 sont agencées de manière que la bascule peut subir, depuis une première position où la bascule 66 est en appui contre la butée 90, une rotation dans le second sens de rotation, opposé au premier sens de rotation, jusqu'à une seconde position où le doigt d'entrainement 68 est en recul / retrait du côté du premier axe de rotation 22. La rampe de contrainte 80 est configurée de manière que, lors du mouvement relatif MR entre la bascule et la planche de roue 8 alors que le ressort 16A est détendu / non contraint et la bascule est située dans la seconde position, l'organe d'accouplement 70 peut venir en appui contre la rampe de contrainte 80 (Figure 7B) pour ensuite pouvoir suivre cette rampe de contrainte en s'approchant du propre logement 76 (Figures 7C à 7E). Ainsi, dans ce cas, sur un premier tronçon de la rampe de contrainte, lors du mouvement relatif MR, l'organe d'accouplement 70 exerce une force sur la deuxième extrémité de la bascule qui entraine cette bascule en rotation dans le premier sens de rotation (Figure 7C) jusqu'à ce que la bascule arrive en appui contre la butée 90 (Figure 7D).
-
À la Figure 7D est représenté le point de contact CP et la ligne géométrique L3 intervenant dans le procédé d'accouplement, étant donné qu'il est au moins nécessaire, selon l'invention, que le ressort 16A avec l'organe d'accouplement 70 et la bascule 66 soient configurés de manière que la rampe de contrainte 80 croise la ligne géométrique L3, passant par le point de contact PC de l'organe d'accouplement 70 et définissant un cercle autour de l'axe de rotation central 22, dans la situation de la Figure 7D où la bascule est en contact avec la butée 90 et le ressort 16A est détendu. En effet, dans une variante générale du procédé d'accouplement pour le dispositif comprenant une bascule 66, une étape de positionnement de la bascule peut intervenir avant l'étape d'accouplement, cette étape de positionnement consistant à mettre la bascule en contact avec la butée 90, c'est-à-dire dans sa première position, avant d'effectuer le mouvement relatif MR entre la planche de roue 8 et la plaquette 11. On notera que, dans la variante décrite ici, l'organe d'accouplement 70 subit un déplacement relativement au support, nommé déplacement relatif, selon la deuxième direction D2 vers l'axe de rotation 22 et le ressort 16A est contraint seulement lorsque l'organe d'accouplement 70 continue de suivre / gravir la rampe de contrainte sur un second tronçon, situé à la suite du premier tronçon du côté du logement 76 (Figure 7E), après que la bascule 66 soit arrivé en appui contre la butée 90 (Figure 7D). Finalement, l'organe d'accouplement 70 entre dans son propre logement 76 par son ouverture latérale, alors que le ressort subit une détente partielle rapide, et ledit mouvement relatif est terminé par un petit recul, dans le sens opposé au sens intervenant lorsque l'organe d'accouplement gravit la rampe de contrainte, pour permettre à cet organe d'atteindre la position d'accouplement prévue (Figure 7F). Dans cette position d'accouplement fonctionnelle, le ressort peut être encore un peu contraint radialement ou être détendu radialement. En l'absence d'un moment de force exercé sur l'organe d'accouplement, le ressort est alors dans ce dernier cas totalement détendu.
-
Dans ce deuxième mode de réalisation, on constate que le mouvement relatif MR entre la planche de roue 8 (le support) et la bascule 66 (l'élément rigide) peut comprendre trois phases lorsque la bascule n'est pas initialement en appui contre la butée 90. Une première phase, intervenant jusqu'à ce que l'organe d'accouplement 70 arrive en contact contre la rampe de contrainte 80, dans laquelle le mouvement relatif est selon la direction angulaire D1, c'est-à-dire qu'il s'agit d'une rotation autour de l'axe 22 et guidé par l'arbre 28 du moyeu 26 (à noter qu'on considère ici que la bascule ne tourne pas autour de son propre axe 72). Ensuite, comme indiqué, il est prévu une poursuite du mouvement relatif jusqu'à ce que l'organe d'accouplement soit inséré dans le propre logement 76. Ainsi, dans une deuxième phase du mouvement relatif MR, ce mouvement relatif est plus complexe car la bascule tourne progressivement autour de son propre axe 72 jusqu'à venir en appui contre la butée 90. Dans cette deuxième phase, le mouvement relatif MR continue d'avoir une composante selon ladite direction angulaire D1, à savoir une rotation guidée autour de l'axe central 22 qui est nécessaire, mais apparaît en plus une composante relative à la rotation de la bascule 66 autour de son axe 72. On nommera aussi 'phase initiale' cette deuxième phase, laquelle est bien une phase initiale en relation avec le fait que l'organe d'accouplement suit / gravit la rampe de contrainte.
-
Ensuite, une fois la bascule arrivée en appui contre la butée 90, sa rotation autour de l'axe 72 prend fin et commence alors la troisième phase du mouvement relatif qui redevient une rotation autour de l'axe central. C'est dans cette troisième phase que le ressort est contraint radialement et que l'organe d'accouplement 70 subit un déplacement radial relativement à la planche de roue, à savoir vers l'axe de rotation 22 de cette planche de roue. On remarquera que l'apparition d'une contrainte radiale du ressort résultant d'un déplacement radial de l'organe d'accouplement n'exclut pas une contrainte angulaire éventuelle associée à un déplacement angulaire de l'organe d'accouplement relativement à la planche de roue. Pour être précis, on peut mentionner que la rampe de contrainte est agencée de manière que, au cours de ladite poursuite du mouvement relatif, l'organe d'accouplement subit un déplacement relativement au support (la planche de roue 8), dont au moins une composante non nulle est selon une deuxième direction (D2) non parallèle à la première direction (D1), et l'élément élastique (le ressort 16) est alors contraint. Pour couvrir de manière générale et précise des mouvements relatifs pouvant être complexes, comme c'est le cas ici, on peut mentionner que la rampe de contrainte est agencée de manière que, au moins lors de l'assemblage du dispositif ou du montage du dispositif dans le mouvement horloger depuis l'état intermédiaire défini précédemment, l'organe d'accouplement peut venir en appui contre la rampe de contrainte, par un mouvement relatif guidé entre l'élément rigide et le support selon la première direction (D1), depuis ladite position relative initiale (IRP) et ensuite suivre cette rampe de contrainte en s'approchant du propre logement alors que le mouvement relatif est poursuivi avec au moins une composante non nulle selon la première direction.
-
L'organe d'accouplement 70 est configuré pour pouvoir pénétrer au moins partiellement dans son propre logement 76 par l'ouverture latérale de ce logement. En particulier, le logement présente une surface latérale 54A orientée obliquement dans le sens de rotation 56 de la planche de roue 8, prévu pour l'entrainement de l'indicateur 4, relativement à une direction radiale passant par le milieu de cette surface latérale, et l'organe d'accouplement 70 présente un flanc latéral 52A, situé en regard de la surface latérale 54A dans la position d'accouplement fonctionnelle (voir Figures 7B et 7F), qui est aussi incliné obliquement dans le même sens que la surface latérale et qui appuie au moins partiellement contre cette surface latérale au moins lors d'un entrainement de l'indicateur (Figure 8B). Cette caractéristique particulière permet d'assurer un bon maintien de l'organe d'accouplement dans le propre logement dès que le ressort 16A est mis sous tension en contraction. De plus, la surface latérale 54A et le flanc latéral 52A présentent une relativement grande longueur.
-
Le logement 76 présente une forme générale triangulaire et s'ouvre progressivement en direction de son ouverture latérale. La forme de la partie de l'organe d'accouplement 70 qui s'insère dans le propre logement par l'ouverture latérale correspond sensiblement à celle du logement. Cette configuration permet avantageusement à l'organe d'accouplement de s'insérer aisément dans le propre logement, mais permettrait a priori à cet organe d'en ressortir assez facilement en cas de choc, bien que le logement soit prévu relativement profond. Cependant, le ressort 16A est agencé de manière que lors d'un chargement de ce ressort, l'organe d'accouplement 70 est à faible distance de l'extrémité intérieur 17 du ressort qui est rigidement liée à la partie centrale 24A. Dans cette situation, l'organe d'accouplement 70 ne peut pas sortir du propre logement en cas de choc. De plus, lorsque le doigt d'entrainement est sans interaction avec la denture 5 de l'indicateur et le ressort 16A est alors sensiblement détendu, l'organe d'accouplement 70 ne peut pas non plus sortir latéralement de son propre logement lors d'un choc. Ainsi, le mécanisme 60 est agencé de manière que, lorsque le ressort est détendu ou contraint lors d'un chargement de ce ressort précédant un saut de l'indicateur, l'organe d'accouplement ne peut pas sortir du propre logement 76.
-
Une fois introduit dans son propre logement 76, l'organe d'accouplement 70 est avantageusement maintenu dans le propre logement par une force radiale du ressort 16A appliquée à l'organe d'accouplement vers l'extérieur. Cette force radiale est augmentée lors d'un changement rapide du quantième ou lors d'une correction de l'heure en sens antihoraire et passant par minuit, par le fait que le doigt d'entrainement 68 et l'organe d'accouplement 70 subissent alors un recul / retrait en direction de l'axe de rotation 22 via une rotation horaire de la bascule (second sens de rotation de la bascule), de sorte que l'organe d'accouplement est ainsi normalement maintenu dans le propre logement même lorsque le ressort 16A est un peu contraint en expansion dans une telle situation. En effet, étant donné que la plaquette 11 subit une rotation relativement à la planche de roue 8 comme lors du procédé d'accouplement, à savoir dans un sens inverse au sens de rotation relatif de cette plaquette intervenant lors d'un entrainement de l'anneau des quantièmes 4 par le mécanisme 60, l'organe d'accouplement 70 pourrait théoriquement ressortir du propre logement 76. Mais lors de telles corrections, le doigt d'entrainement et l'organe d'accouplement subissent un recul vers l'axe central, contrairement à ce qui se passe lors du procédé d'accouplement.
-
Lorsque le doigt d'entrainement 68 s'escamote, par une rotation de la bascule 66 dans ledit second sens vers l'axe de rotation 22, lors d'une correction rapide du quantième ou de l'heure dans un sens antihoraire, le doigt d'accouplement 68 se rapproche de la partie centrale 24A de manière qu'il ne peut plus, après une certaine rotation initiale de la bascule, ressortir du propre logement 76. Lors de la rotation initiale, le ressort 16A peut subir une certaine contrainte angulaire en expansion et permettre théoriquement à l'organe d'accouplement de sortir de son propre logement en cas de choc. Toutefois, si l'organe d'accouplement subit une accélération sensiblement en direction de l'axe de rotation 22 de la planche de roue 8, la bascule subit alors un certain couple de force, lequel engendre une rotation de cette bascule autour de son axe de rotation 72, et le doigt d'entrainement suit alors l'organe d'accouplement de sorte que ce dernier demeure au moins en partie dans son propre logement. Si l'accélération est selon une direction passant sensiblement par le centre de gravité de la bascule et son axe de rotation 72, l'organe d'accouplement 70 peut subir un mouvement de sortie du propre logement 76. Cependant, la partie saillante intérieur 82 du ressort peut être configurée de manière à empêcher que l'organe d'accouplement ne puisse ressortir complètement de son propre logement. En conclusion, le mécanisme 60 est agencé de manière que l'organe d'accouplement 70 demeure dans son propre logement 76 en fonctionnement normal, de sorte que cet organe d'accouplement est en tout temps solidaire du doigt d'entrainement en fonctionnement normal, et qu'il ne puisse dans la plupart des cas pas sortir de son propre logement lors de chocs, de préférence en aucun cas.
-
Le deuxième mode de réalisation se distingue du premier mode de réalisation en outre par le fait que la rampe de contrainte 80 est agencée en aval du logement 76 relativement à un sens de rotation 56 de la planche de roue 8 lors de l'entrainement de l'indicateur sautant 4 par le mécanisme 60 dans le sens d'entrainement donné 50, de sorte que ledit mouvement relatif MR entre la bascule 66 et la planche de roue avec le ressort 16 est effectué pour la planche de roue dans un sens opposé à son sens de rotation 56 intervenant lors d'un entrainement de l'indicateur sautant 4. À ce deuxième mode de réalisation correspond un deuxième mode de mise en oeuvre du procédé d'accouplement selon l'invention, dans lequel le mouvement relatif MR entre la bascule 66 et la planche de roue 8 est effectué, pour la planche de roue, dans un sens opposé au sens de rotation 56 de cette planche de roue lors de l'entrainement de l'indicateur sautant par le mécanisme dans le sens d'entrainement donné 50, et dans lequel le ressort 16A est contraint en expansion lors du procédé d'accouplement. Ce deuxième mode de mise en oeuvre du procédé est représenté aux Figures 7A à 7F déjà décrites. À la Figure 7A, le ressort 16A, la planche de roue 8 et la bascule 66, ensemble avec la plaquette 11 sur laquelle cette bascule est montée, sont dans une position relative initiale IRP à l'intérieur d'une plage de positions relatives possibles P2(θ) pour cette position relative initiale IRP, laquelle s'étend ici sur environ 90°. Dans d'autres variantes, la plage s'étend seulement sur environ 20° ou 30°. Ainsi, dans une variante générale, cette plage s'étend sur au moins 20°. Dans une variante avantageuse, la plage de positions relatives possibles s'étend sur au moins 45°, de préférence sur au moins 60°. On notera que, dans l'exemple représenté, la bascule 66 se trouve initialement environ dans sa seconde position en recul / retrait vers l'axe de rotation 22. L'assemblage des divers éléments avec un moyeu 26 est réalisé de manière similaire à celui décrit pour le premier mode de mise en oeuvre.
-
Avantageusement, le mécanisme 60 est agencé de manière que si, lors d'un montage de ce mécanisme, l'organe d'accouplement 70 est finalement situé au-delà de son propre logement 76 à cause d'un mouvement relatif effectué sur distance trop longue (situation montrée à la Figure 9), cet organe d'accouplement peut occuper momentanément une position de pré-accouplement, en amont du propre logement 76 relativement au sens de rotation 56 de la planche de roue 8 intervenant lors d'un entrainement de l'indicateur 4. Le mécanisme 60 est agencé de manière que l'organe d'accouplement peut venir à la position d'accouplement fonctionnelle (Figure 8A) depuis la position de pré-accouplement lors d'un entrainement de la planche de roue 8 dans ledit sens de rotation 56 alors que le doigt d'entrainement 68 est en appui contre une dent 5a que comporte l'indicateur sautant 4. Si par inadvertance le dispositif 60 est monté dans le mouvement horloger 62 dans l'état de la Figure 9, à savoir avec l'organe d'accouplement dans une position de pré-accouplement, dès que le doigt d'entrainement 68 arrive en appui contre une dent 5a de l'indicateur lors du fonctionnement normal du mouvement horloger, l'organe d'accouplement 70 suit le flanc intérieur 88 de la bascule 66 et l'organe d'accouplement arrive automatiquement dans le propre logement 76 et dans la position d'accouplement prévue. Ensuite, le ressort 16A peut se charger en contraction comme prévu pour pouvoir effectuer un entrainement par saut de l'indicateur 4. Certes, dans un tel cas, le test de fonctionnement du mécanisme 60 demandera de modifier le positionnement de l'aiguille des minutes sur son axe si cette aiguille a déjà été montée avant ce test pour l'entrainement de l'indicateur par saut.