EP4180328A2 - Restraint system utilizing co-axial actuation - Google Patents
Restraint system utilizing co-axial actuation Download PDFInfo
- Publication number
- EP4180328A2 EP4180328A2 EP22206500.5A EP22206500A EP4180328A2 EP 4180328 A2 EP4180328 A2 EP 4180328A2 EP 22206500 A EP22206500 A EP 22206500A EP 4180328 A2 EP4180328 A2 EP 4180328A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- actuator
- outer tube
- restraint
- assembly
- plunger
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D9/00—Equipment for handling freight; Equipment for facilitating passenger embarkation or the like
- B64D9/003—Devices for retaining pallets or freight containers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60P—VEHICLES ADAPTED FOR LOAD TRANSPORTATION OR TO TRANSPORT, TO CARRY, OR TO COMPRISE SPECIAL LOADS OR OBJECTS
- B60P7/00—Securing or covering of load on vehicles
- B60P7/06—Securing of load
- B60P7/13—Securing freight containers or forwarding containers on vehicles
Definitions
- the present disclosure is directed to cargo restraint systems and, more particularly, to a cargo restraint system capable of coaxial actuation of restraints.
- ULD unit load device
- Many aircraft have at least one cargo bay designed to receive cargo.
- cargo bays include cargo loading systems that include rollers located on a floor of the cargo bay to provide conveyance for moving a unit load device (ULD) or other cargo through the cargo bay.
- ULD unit load device
- Some ULDs for example, military pallets, have pockets along the sides of the pallets. Restraints may be located in the pockets to provide longitudinal and/or lateral restraint. Such restraint reduces the likelihood of cargo shifting relative to the cargo bay during taxi, takeoff, flight, and landing.
- Current restraint actuation systems are generally configured to deploy and to stow all the restraints simultaneously. Such actuating scheme tends to limit the number of available cargo load configurations.
- a restraint assembly actuation system for use with a cargo restraint system comprising a drive shaft assembly comprising a first outer tube and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis and a first restraint coupled to the first outer tube, wherein the first outer tube is configured to rotate the first restraint about the axis to a raised position to restrain a cargo load.
- the first restraint comprises a head configured to engage with the cargo load.
- the first restraint comprises a shroud coupled to the outside of the first outer tube, and a plunger rod coupled to the shroud and the head.
- the shroud comprises a notch opening configured to receive a notch coupled to the inner shaft and the shroud at a first opening of the first outer tube.
- the first restraint further comprises the head defining a plunger channel, a plunger including the plunger rod and a plunger lever, the plunger rod being located, at least, partially in the plunger channel, a plunger torsion spring configured to apply a first biasing load to the plunger lever, and a compression spring configured to bias a first end of the plunger away from an upper surface of the head.
- a drive cap located around the first end of the plunger rod.
- the shroud defines a plunger opening configured to receive the first end of the plunger rod.
- the shroud includes a protrusion extending radially outward from an outer circumferential surface of the shroud.
- a second outer tube is coupled to the inner shaft and configured to rotate with the inner shaft.
- a second restraint is coupled to the second outer tube, wherein the second outer tube is configured to rotate the second restraint about the axis to a raised position to restrain the cargo load.
- the second outer tube is located aft of the first outer tube.
- a coaxial actuator assembly comprising a drive shaft assembly comprising a first outer tube and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis, a first outer tube actuator assembly coupled to the drive shaft assembly, a first actuator tube disposed within the first outer tube actuator assembly and coupled to the first outer tube, wherein the first actuator tube comprises a first actuator opening and a second actuator opening, each disposed in the first actuator tube, a first spring loaded plunger configured to be disposed in at least one of the first actuator opening or the second actuator opening, and a first actuator lever coupled to the first spring loaded plunger, the first actuator lever configured to translate the first spring loaded plunger at least one of in and out the first actuator opening and the second actuator opening, and a first geometric gripping surface coupled to the first outer tube actuator assembly configured to drive rotation of the first outer tube.
- the first outer tube rotates coaxially about the axis in response to the first geometric gripping surface driving rotation of the first outer tube.
- an inner shaft actuator assembly is coupled to the drive shaft assembly, a second actuator tube disposed within the inner shaft actuator assembly and coupled to the inner shaft, wherein the second actuator tube comprises a first actuator opening and a second actuator opening each disposed in the second actuator tube, a second spring loaded plunger configured to be disposed in the first actuator opening or the second actuator opening, and a second actuator lever coupled to the second plunger, configured to translate the second plunger at least one of in and out the first actuator opening and the second actuator opening, and a second geometric gripping surface coupled to the inner shaft actuator assembly and configured to drive rotation of the inner shaft.
- the inner shaft rotates in response to the second geometric gripping surface driving rotation of the inner shaft.
- a restraint assembly actuation system comprising a drive shaft assembly comprising a first outer tube and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis, a coaxial actuator assembly comprising a first outer tube actuator assembly coupled to the drive shaft assembly, a first actuator tube disposed within the first outer tube actuator assembly and coupled to the first outer tube, wherein the first actuator tube comprises a first actuator opening and a second actuator opening each disposed in the first actuator tube, a first spring loaded plunger configured to be disposed in at least one of the first actuator opening or the second actuator opening, a first actuator lever coupled to the first spring loaded plunger, configured to translate the first spring loaded plunger at least one of in and out the first actuator opening and the second actuator opening, and a first geometric gripping surface coupled to the first outer tube actuator assembly and configured to drive rotation of the first outer tube, a second outer tube coupled to the inner shaft, and a first restraint assembly actuation system comprising a first restraint coupled
- a second restraint is coupled to the second outer tube.
- the second outer tube is configured to rotate the second restraint about the axis to the raised position to restrain the cargo load.
- an inner shaft actuator assembly is coupled to the drive shaft assembly, a second actuator tube disposed within the inner shaft actuator assembly and coupled to the inner shaft, wherein the second actuator tube comprises a first actuator opening and a second actuator opening each disposed in the second actuator tube, a second spring loaded plunger configured to be disposed within at least one of the first actuator opening or the second actuator opening, and a second actuator lever coupled to the second plunger, configured to translate the second plunger at least one of in and out the first actuator opening and the second actuator opening, and a second geometric gripping surface coupled to the inner shaft actuator assembly configured to drive rotation of the inner shaft.
- a plurality of forward restraints is coupled to the first outer tube and configured to be actuated by the first outer tube, and a plurality of aft restraints coupled to the second outer tube and configured to rotate coaxially with the second outer tube.
- the present disclosure provides a restraint assembly actuation system for aircraft cargo that, in various embodiments, utilizes a coaxial actuator assembly to actuate (e.g., using any appropriate motion or combination of motions) one or more restraints from a raised (or deployed) position to a stowed position.
- the restraint assembly actuation system includes a drive shaft assembly comprising a first outer tube and an inner shaft disposed coaxially about an axis.
- the inner shaft can be another tube and not a solid shaft. Multiple tubes may be disposed in the system coaxially about the axis without a solid inner shaft.
- a first restraint or a plurality of first restraints may be coupled to a first outer tube.
- the cargo restraint system also comprises one or more coaxial actuator assemblies.
- a coaxial actuator assembly in various embodiments, comprises a first outer tube actuator assembly coupled to the drive shaft assembly.
- the first outer tube actuator assembly in various embodiments, controls rotation of the first outer tube located about the axis. Translation of the first restraint or a plurality of first restraints may be controlled by rotation of the first outer tube.
- a coaxial actuation assembly may comprise an inner shaft actuator assembly configured to control rotation of the inner shaft.
- an extender tube may be coupled to the inner shaft.
- a second outer tube may be coupled to the inner shaft at the extender tube, such that rotation of the inner shaft is translated to the second outer tube.
- Translation of a second restraint or a plurality of second restraints may be controlled by rotation (e.g., actuation) of the second outer tube. Allowing the restraints to be actuated as in at least two groups allows for more flexible control options than a single actuation system that actuates all restraints at once, while increasing the number of available restraining configurations throughout the cargo deck.
- FIG. 1 illustrates an aircraft 20 with cargo 22 being loadable through a loading door 24 of the aircraft 20.
- Cargo 22 may be loaded through loading door 24 and onto a cargo deck 26.
- FIG. 2 illustrates cargo deck 26.
- An X-Y-Z axis is shown in various drawings to illustrate various orientations of components.
- Cargo deck 26 includes a cargo deck floor 30, which may be formed by one or more panels 32 that are coupled to various structural components of aircraft 20 (e.g., to beams, floors, etc.).
- FIG. 2 illustrates cargo deck 26 includes a restraint assembly actuation system 50.
- restraint assembly actuation system 50 may be installed along cargo deck 26.
- Cargo deck 26 may also include a cargo loading system 60 comprising a plurality of freely rotating conveyance rollers and/or powder drive units (PDUs) mounted in the cargo deck 26 to define the conveyance plane. Cargo loaded onto the aircraft cargo deck 26 can be moved throughout the cargo deck 26 using the cargo loading system 60.
- PDUs powder drive units
- Restraint assembly actuation system 50 may be used to restrain cargo (e.g., unit load devices (ULDs)) within/relative to the cargo deck 26.
- the restraint assembly actuation system 50 may include a plurality of first restraints 102a, one or more second restraints 104, and a plurality of third restraints 106.
- the first restraints 102 may be referred to as X-restraints as they may restrict cargo from translating in the X (or longitudinal) direction.
- the second restraints 104 may be referred to as Z-restraints as they may restrict cargo from translating in the Z (e.g., vertical) direction.
- the third restraints 106 may be referred to as YZ-restraints as they may restrict translation of cargo in the Z (e.g., vertical) direction and the Y (e.g., lateral) direction.
- the restraint assembly actuation system 50 may include a coaxial actuator assembly 110.
- a control region 112 of coaxial actuator assembly 110 may be located, for example, proximate loading door 24, a forward end of the aircraft, and/or at any other location that may be readily accessible to crew responsible for loading cargo into cargo deck 26.
- coaxial actuator assembly 110 may be located under panels 32.
- Coaxial actuator assembly 110 is configured to control the actuation of the first restraints 102.
- coaxial actuator assembly 110 may be employed to translate first restraints 102 between a raised position and a stowed position.
- coaxial actuator assembly 110 may also control actuation of the second restraints 104 and/or the third restraints 106.
- FIG. 3 illustrates how the various restraints of restraint assembly actuation system 50 may restrain a ULD 114.
- the first restraint 102 may rest between tabs 116, 118 of the ULD 114, restricting movement of the ULD 114 in the X direction.
- the second restraint 104 may rest above tabs 107, 109 of the ULD 114, thus restricting movement of the ULD 114 in the Z direction.
- the third restraint 106 may rest adjacent and above the tab 118 of the ULD 114, thus restricting movement of the ULD 114 in the Y and Z directions.
- first restraint 102 may be actuated between a raised position (as shown in FIG. 4A ) and a stowed position (as shown in FIG. 4B ).
- First restraint 102 may include a head 120 (also referred to herein as a restraint body) which may be both raised and stowed.
- the head 120 In the raised position, the head 120 may extend above the cargo deck floor 30.
- the head 120 In the stowed position, the head 120 may fit within an orifice 122 formed in the cargo deck floor 30.
- panel 32 may define an orifice 122 configured to receive a head 120.
- a first surface 124 of head 120 may be relatively/substantially flush and/or planar with an upper surface 36 the panel 32.
- Restraint assembly actuation system 50 comprises first group 360 of restraints 102a and second group 362 of restraints 102b. Restraint assembly actuation system 50 further comprises drive shaft assembly 150.
- Drive shaft assembly 150 comprises inner shaft 154 and first outer tube 152, which are coaxially disposed as described herein along axis A-A', with A representing the forward terminus of drive shaft assembly 150 and A' representing the aft terminus of drive shaft assembly 150.
- Coaxial actuator assembly 110 is illustrated comprising inner shaft actuator assembly 976 and first outer tube actuator assembly 975.
- Inner shaft 154 is coupled to inner shaft actuator assembly 976, where inner shaft actuator assembly 976 is configured to rotate inner shaft 154 about axis A-A'.
- First outer tube 152 is coupled to first outer tube actuator assembly 975, where first outer tube actuator assembly 975 is configured to rotate first outer tube 152 about axis A-A'.
- First outer tube 152 is configured, as shown and described herein, to actuate restraints 102a.
- rotation of first outer tube 152 imparted by first outer tube actuator assembly 975 causes actuation of restraints 102a.
- Restraints 102b remain stationary and are thus not activated by rotation of first outer tube 152 imparted by first outer tube actuator assembly 975.
- Rotation of inner shaft 154 imparted by inner shaft actuator assembly 976 causes actuation of restraints 102b.
- first group 360 are separately actuated from second group 362.
- restraint assembly actuation system 50 allows one group of restraints to be actuated independently of a second group of restraints.
- first outer tube 152 terminates along axis A-A'.
- Inner shaft 154 may be coupled to second outer tube 352.
- Second outer tube 352 may be fixedly attached to inner shaft 154 such that rotation of inner shaft 154 rotates second outer tube 352.
- inner shaft 154 rotates an extender tube such that second outer tube 352 rotates one revolution for every one revolution rotated by inner shaft 154.
- Second outer tube 352 may be fixedly attached to inner shaft 154 by any suitable means, for example, by press fit, interference fit, fasteners, threaded engagement, radially disposed pins, and/or welding, brazing, or other metallurgical joinery.
- Second outer tube 352 may be coupled to inner shaft 154 via intermediary components, such as a collar or cylindrical clamp.
- first restraint 102 is illustrated in the raised position.
- panel 32 is removed to illustrate components of restraint assembly actuation system 50 that may be located under upper surface 36 of panel 32.
- first restraint 102 may include one or more roller(s). Rollers may protrude from side surfaces 132 of head 120. Rollers may be spring loaded such that rollers retract into head 120, against the bias of a spring, in response to a load (represented by arrow L1) being transmitted from ULD 114 into the roller and consequently first restraint 102.
- First restraint 102 may be raised into (e.g., located within) a pocket 117 of ULD 114.
- Pocket 117 may be defined by a flange 119 located about a perimeter of ULD 114.
- load L1 may be transmitted from ULD 114 into first restraint 102.
- the rollers may reduce friction between ULD 114 and first restraint 102 when first restraint 102 translates between the raised position (as shown in FIG. 4A and FIG. 5A ) and the stowed position (as shown in FIG. 4B ).
- first restraint 102 may allow for lower release forces when moving from the raised position to the stowed position to release ULD 114.
- forces reacting between ULD 114 and first restraint 102 are attenuated by the rollers to increase ease of movement of first restraint 102 (relative to ULD 114) when moving between the raised position and the stowed position.
- a mount 140 ( FIG. 5B ) may be coupled to panel 32 via fasteners 142.
- Fasteners 142 can be washers and a bolt head, or any other suitable fastener.
- a drive shaft assembly 150 may be located through, and may extend through, mount 140 and head 120. Stated differently, mount 140 and head 120 may be located on, and/or mounted on, drive shaft assembly 150.
- Mount 140 may be a stationary structure. Head 120 and drive shaft assembly 150 may rotate relative to mount 140.
- Drive shaft assembly 150 includes a first outer tube 152 and an inner shaft 154. First outer tube 152 is located about inner shaft 154 (e.g., first outer tube 152 and inner shaft 154 are coaxially disposed).
- first outer tube 152 and inner shaft 154 may both coaxially rotate about an axis A-A'. However, first outer tube 152 rotates independently of inner shaft 154. In this regard, rotation of inner shaft 154 may be performed independently from first outer tube 152 (i.e., rotation of inner shaft 154 does not cause or impart rotation/movement of first outer tube 152) and rotation of first outer tube 152 may be performed independently from inner shaft 154 (i.e., rotation of first outer tube 152 does not cause or impart rotation/movement of inner shaft 154).
- a lubricant may be applied to the outside of the inner shaft to reduce friction between the first outer tube and the inner shaft.
- the lubricant may comprise oil or grease.
- the outside of the inner shaft or the inside of the first outer tube may be coated in polytetrafluoroethylene to reduce friction between the first outer tube and the inner shaft.
- the inner shaft and/or the first outer tube may comprise a wear coating disposed on one or more surfaces to provide corrosion resistance and/or mitigation of friction or abrasion.
- First restraint 102 may include one or more head torsion spring(s) 160.
- Head torsion spring 160 is configured to bias head 120 toward the raised position or the stowed position. Stated differently, head torsion spring 160 is configured to bias head 120 in a first circumferential direction about axis A-A'.
- first restraint 102 includes a plunger 170 ( FIG. 6 ), which may engage first outer tube 152, such that rotation of first outer tube 152 is transferred to head 120. Stated differently, when the plunger 170 is in an engaged state, head 120 rotates with first outer tube 152.
- first restraint 102a includes a plunger 170.
- first restraint 102 is in the raised position and plunger 170 is in an engaged state.
- Plunger 170 includes a plunger rod 172 and a plunger lever 174.
- Plunger rod 172 is configured to translate radially (i.e., perpendicular to axis A-A'). In this regard, plunger rod 172 translates toward and away from first outer tube 152.
- plunger rod 172 may located in a plunger channel 176 defined by head 120.
- a compression spring 180 may be located about plunger rod 172. Compression spring 180 may be compressed between a spring interference surface 182 of plunger rod 172 and a bushing 184 located about plunger rod 172. In various embodiments, bushing 184 may be eliminated and compression spring 180 may be compressed between spring interference surface 182 of plunger rod 172 and a second spring interference formed by head 120. Compression spring 180 biases a first end 186 of plunger rod in the radially inward direction (i.e., toward first outer tube 152 and axis A-A).
- a pin 188 may be located through plunger rod 172 and plunger lever 174. Pin 188 may be located proximate a second end 190 of plunger rod 172. Second end 190 is opposite first end 186. Plunger lever 174 may rotate about pin 188. A plunger torsion spring 192 may be located about pin 188 and may apply a biasing load to plunger lever 174. Plunger torsion spring 192 may bias plunger lever 174 in the first circumferential direction about pin 188.
- a shroud 200 may be located about first outer tube 152. Stated differently, an inner circumferential surface 202 of shroud 200 may define a tube channel configured to receive first outer tube 152.
- a plunger opening 206 is formed in the outer circumferential surface 208 of shroud 200. Stated differently, shroud 200 defines plunger opening 206. Plunger opening 206 is configured to receive first end 186 of plunger rod 172. Locating plunger rod 172 in plunger opening 206 creates an interference between plunger rod 172 and shroud 200, such that plunger rod 172 is prevented from translating relative to shroud 200.
- shroud 200 defines a notch opening (e.g., a bore) 210 configured to receive a notch 212.
- First outer tube 152 may define a notch channel 214.
- Notch 212 may be located through notch opening 210 and in notch channel 214, in response to radially aligning notch opening 210 and notch channel 214. Locating notch 212 in notch opening 210 and notch channel 214 rotationally couples shroud 200 and first outer tube 152, such that rotation of first outer tube 152 about axis A-A' causes shroud 200 to rotate about axis A-A'.
- Inner shaft 154 is shown extending through axis A-A', axis A-A' being the common axis for both first outer tube 152 and inner shaft 154.
- Shroud 200 includes a protrusion 220.
- Protrusion 220 extends radially outward from outer circumferential surface 208 of shroud 200.
- a drive cap 222 may be located around first end 186 of plunger rod 172, and between plunger rod 172 and head 120.
- protrusion 220 may be located proximate and/or may abut drive cap 222.
- first outer tube 152 When plunger 170 is the engaged state, rotation of first outer tube 152 about axis A-A' causes shroud 200 to rotate in the same direction about axis A-A' as first outer tube 152 due to the contact between notch 212 and first outer tube 152 and the contact between notch 212 and shroud 200.
- the rotation of shroud 200 causes head 120 to rotate in the same direction about axis A-A' as first outer tube 152 due to the contact between protrusion 220 and drive cap 222.
- a rotational force is transferred from shroud 200 to head 120 via contact between protrusion 220 and drive cap 222.
- plunger torsion spring 192 is configured to bias first lever surface 232 toward first lever interference surface 234.
- first lever surface 232 and first lever interference surface 234 blocks, or prevents, further rotation of plunger lever 174 in the first circumferential direction about 188 (i.e., the inference overcomes the biasing load being applied by plunger torsion spring 192).
- plunger lever 174 may be located radially inward of an upper surface 236 of head 120.
- a distance plunger lever 174 and axis A-A' may be less than a distance between upper surface 236 and axis A-A'.
- Upper surface 236 may be approximately perpendicular to first surface 124 and side surfaces 132 ( FIG. 5B ).
- “approximately” means ⁇ 15° from perpendicular.
- the spring constant of compression spring 180 is great enough to overcome the biasing load applied by plunger torsion spring 192.
- first restraint 102 taken along line 6-6 in FIG. 5B , is illustrated, with first restraint 102 in the raised position and plunger 170 in a disengaged state.
- a load L2 is applied in a second circumferential about pin 188 (e.g., in a direction opposite the biasing force applied by plunger torsion spring 192).
- the load L2 along with an interference between a first end 240 of plunger lever 174 and a second lever interference surface 242 of head 120, force pin 188, second end 190 of plunger rod 172, and first lever surface 232 away from first lever interference surface 234 of head 120.
- the translation of plunger rod 172 away from axis A-A' causes first end 186 of plunger rod 172 to translate out of plunger opening 206.
- the translation of plunger rod 172 away from axis A-A' also compresses compression spring 180 between spring interference surface 182 and bushing 184.
- first restraint 102 taken along line 6-6 in FIG. 5B , is illustrated, with plunger 170 in the disengaged state and first restraint 102 beginning to translate toward the stowed position.
- head 120 can rotate about shroud 200.
- locating first end 186 of plunger rod 172 radially outward of outer circumferential surface 208 removes the interference between shroud 200 and plunger rod 172, thereby allowing first end 186 of plunger rod 172 to translate circumferentially about axis A-A' and along the outer circumferential surface 208 of shroud 200.
- Shroud 200 does not rotate due to the contact between notch 212 and first outer tube 152.
- head 120 With plunger 170 in the disengaged state, head 120 can be rotated in a second circumferential direction about shroud 200, first outer tube 152, and axis A-A' (e.g., toward the stowed position) in response to a load L3 greater than the biasing force of head torsion spring 160 being applied to head 120.
- outer circumferential surface 208 blocks first end 186 of plunger rod 172 from translating radially inward (i.e., toward axis A-A'), thereby maintaining the distance between pin 188 and first lever interference surface 234 of head 120 and between second end 190 of plunger rod 172 and first lever interference surface 234.
- Plunger lever 174 may rotate until first lever surface 232 contacts head 120 (e.g., until plunger lever 174 contacts first lever interference surface 234).
- first end 240 of plunger lever 174 may be located above upper surface 236 of head 120. Stated differently, a distance between first end 240 of plunger lever 174 and axis A-A' may be greater than the distance between upper surface 236 of head 120 and axis A-A', when plunger 170 is in the disengaged state.
- first restraint 102 taken along line 6-6 in FIG. 5B , is illustrated, with plunger 170 in the disengaged state and first restraint 102 in the stowed position.
- plunger torsion spring 192 forces plunger lever 174 toward rotate in the first circumferential direction about pin 188, thereby forcing first end 240 to translate past (e.g., above) upper surface 236 of head 120.
- Load L3 FIG. 7D ) may be removed from, and/or no longer applied to, head 120 in response to first end 240 of plunger lever 174 translating past the edge of vertical surface 260.
- head torsion spring 192 may bias head 120 in the first circumferential direction about axis A-A'.
- the biasing force of head torsion spring 160 forces first end 240 of plunger lever 274 toward a lower surface 262 of panel 32.
- Lower surface 262 of panel is oriented away from upper surface 36 of panel.
- the contact between first end 240 of plunger lever 174 and lower surface 262 of panel 32 maintains head 120 in the stowed position. Stated differently, the interference between plunger lever 174 and lower surface 262 prevents first restraint 102 from translating to the raised position.
- second restraint 102b a cross-section view of second restraint 102b, taken along line 6-6 in FIG. 5B , is illustrated, with the plunger in the disengaged state and prior to second restraint 102b being translated from the stowed state toward the raised state.
- second restraint 102b is substantially similar to first restraint 102a, though second restraint 102b is actuated by second outer tube 352.
- plunger 170 is translated to the engaged position, thereby rotationally coupling head 120 to shroud 200 and first outer tube 152.
- second outer tube 352 is rotated about axis A-A', thereby causing shroud 200 to rotate about axis A-A'.
- the rotation of shroud 200 brings protrusion 220 of shroud 200 into contact with drive cap 222.
- Protrusion 220 and drive cap 222 are configured such that plunger opening 206 is radially aligned with the first end 186 of plunger rod 172 when protrusion 220 contacts drive cap 222, however, the frictional force between lower surface 262 and plunger lever 174 be prevent plunger rod 172 from translating into plunger opening 206.
- the contact between protrusion 220 and drive cap 222 may force head 120 to rotate in the second circumferential direction about axis A-A' (i.e., away from the raised position and in the direction opposite the direction of the biasing load applied by head torsion spring 160).
- the rotation of head 120 in the second circumferential direction about axis A-A' forces first end 240 of plunger lever 174 away from lower surface 262 of panel 32.
- inner shaft 154 drives rotation of second outer tube 352.
- inner shaft actuator assembly 976 may be used to rotate inner shaft 154 to cause actuation of second restrain 102b.
- Coaxial actuator assembly 110 may couple with drive shaft assembly 150, wherein the first outer tube 152 and the inner shaft 154 are disposed coaxially about the A-A' axis.
- Coaxial actuator assembly 110 comprises inner shaft actuator assembly 976 and first outer tube actuator assembly 975.
- First outer tube actuator assembly 975 includes a first spring loaded plunger lever 906.
- coaxial actuator assembly 110 includes inner shaft actuator assembly 976 coupled to the drive shaft assembly 150.
- Second spring loaded plunger lever 908 may be coupled to the inner shaft actuator assembly 976.
- First outer tube actuator assembly 975 further includes a first geometric gripping surface 910.
- Inner shaft actuator assembly 976 includes a second geometric gripping surface 912.
- a tool may be used to grip on and rotate the first geometric gripping surface 910 or the second geometric gripping surface 912.
- the tool may be a wrench, channel lock pliers, pliers or any other suitable tool which can grip on to a geometric surface and impart rotation around the axis.
- the tool may also be a motorized system, such as an electromechanical actuator and/or electric motor such as a brushless DC motor, which may receive a command to rotate the first geometric gripping surface 910 or second geometric gripping surface 912 in response to a rotational command by a controller.
- the rotational command may be transmitted by the controller to the motorized system in response to a switch being activated.
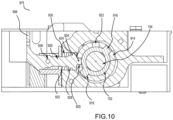
- first outer tube actuator assembly 975 of the coaxial actuator assembly 110 in FIG. 9 may comprise a first actuator tube 914 disposed within the first outer tube actuator assembly 975.
- the first actuator tube 914 is coupled to the first outer tube 152 at a first notch 916 and a second notch 918.
- the first notch 916 and the second notch 918 may be extensions of the first outer tube 152 which are configured to rotate the first outer tube 152 in response to rotation of the first actuator tube 914.
- the first notch 916 and the second notch 918 may be disposed on opposite sides of the first outer tube 152.
- Rotation of the first actuator tube 914 about axis A-A' causes first outer tube 152 to rotate in the same direction about axis A-A' as first actuator tube 914 due to the contact between first notch 916 and first actuator tube 914 and the contact between second notch 918 and first actuator tube 914.
- a first spring loaded plunger 924 is disposed within the first outer tube actuator assembly 975, and the first spring loaded plunger 924 includes a first spring loaded plunger rod 926 and the first spring loaded plunger lever 906.
- First spring loaded plunger rod 926 is configured to translate radially (i.e., perpendicular to axis A-A'). In this regard, first spring loaded plunger rod 926 translates toward and away from first outer tube 152.
- first spring loaded plunger rod 926 may be located in a first spring loaded plunger channel 928.
- a compression spring 930 may be located about first spring loaded plunger rod 926. Compression spring 930 may be compressed between a first spring interference surface 932 and a second spring interference 934 formed by the first spring loaded plunger rod 926.
- Compression spring 930 biases a first end of plunger rod in the radially inward direction (i.e., toward first outer tube 152 and axis A-A).
- Compression spring 930 comprises any suitable spring, such as a coil spring, leaf spring, Belleville spring, or the like
- a first actuator lever pin 936 may be located through first spring loaded plunger rod 926 and first spring loaded plunger lever 906.
- First actuator lever pin 936 may be located proximate a second end of first spring loaded plunger rod 926. The second end of first spring loaded plunger rod 926 is opposite the first end.
- First spring loaded plunger lever 906 may rotate about first actuator lever pin 936.
- a first plunger torsion spring may be located about first actuator lever pin 936 and may apply a biasing load to first spring loaded plunger lever 906.
- First plunger torsion spring may bias first spring loaded plunger lever 906 in the first circumferential direction about first actuator lever pin 936.
- the first actuator tube 914 also comprises a first actuator tube opening 920 and a second actuator tube opening 922.
- the first spring loaded plunger 924 is configured to fit into the first actuator tube opening 920 and the second actuator tube opening 922.
- the first actuator tube 914 and the first outer tube 152 are prevented from rotating about the A-A' axis.
- the first spring loaded plunger rod 926 translates in the direction opposite the first outer tube 152 and perpendicular to the A-A' axis.
- first actuator tube 914 and the first outer tube 152 rotate about the A-A' axis.
- the first outer tube 152 and the first actuator tube 914 coaxially rotate about the A-A' axis in response to the first spring loaded plunger lever 906 translating the first spring loaded plunger 924 out of the first actuator tube opening 920 or the second actuator tube opening 922, and in response to the first geometric gripping surface 910 driving rotation of the first outer tube 152.
- the inner shaft actuator assembly 976 comprises a second actuator tube 938.
- Second actuator tube 938 is coupled to the inner shaft 154 at a first notch 940 and a second notch 942.
- the first notch 940 and the second notch 942 may be extensions of the inner shaft 154 which are configured to rotate the inner shaft 154 in response to rotation of the second actuator tube 938.
- the first notch 940 and the second notch 942 may be disposed on opposite sides of the inner shaft 154.
- Rotation of the second actuator tube 938 about axis A-A' causes inner shaft 154 to rotate in the same direction about axis A-A' second actuator tube 938 due to the contact between first notch 940 and second actuator tube 938 and the contact between second notch 942 and second actuator tube 938.
- a first spring loaded plunger 944 is disposed within inner shaft actuator assembly 976, and the first spring loaded plunger 944 includes a second spring loaded plunger rod 946 and the second spring loaded plunger lever 908.
- Second spring loaded plunger rod 946 is configured to translate radially (i.e., perpendicular to axis A-A'). In this regard, second spring loaded plunger rod 946 translates toward and away from inner shaft 154.
- second spring loaded plunger rod 946 may be located in a second spring loaded plunger channel 948.
- Compression spring 950 may be located about second spring loaded plunger rod 946. Compression spring 950 may be compressed between first spring interference surface 952 and a second spring interference 954 formed by the second spring loaded plunger rod 946.
- Compression spring 950 biases a first end of second spring loaded plunger rod 946 in the radially inward direction (i.e., toward inner shaft 154 and axis A-A).
- Compression spring 950 comprises any suitable spring, such as a coil spring, leaf spring, Belleville spring, or the like
- a first actuator lever pin 956 may be located through second spring loaded plunger rod 946 and second spring loaded plunger lever 908.
- First actuator lever pin 956 may be located proximate a second end of second spring loaded plunger rod 946. The second end of second spring loaded plunger rod 946 is opposite the first end.
- Second spring loaded plunger lever 908 may rotate about first actuator lever pin 956.
- a first plunger torsion spring may be located about first actuator lever pin 956 and may apply a biasing load to second spring loaded plunger lever 908.
- First plunger torsion spring may bias first spring loaded plunger lever 906 second spring loaded plunger lever 908 in the first circumferential direction about first actuator lever pin 956.
- Second actuator tube 938 also comprises a first actuator tube opening 957 and a second actuator tube opening 958.
- the spring loaded plunger 944 is configured to fit into the first actuator tube opening 957 and the second actuator tube opening 958. When the spring loaded plunger 944 is in the first actuator tube opening 957 or the second actuator tube opening 958, then the second actuator tube 938 and the inner shaft 154 are prevented from rotating about the A-A' axis.
- the second spring loaded plunger rod 946 In response to a force exerted in the direction towards the drive shaft assembly 150 to the second spring loaded plunger lever 908, then the second spring loaded plunger rod 946 translates in the direction opposite the inner shaft 154 and perpendicular to the A-A' axis and allows both the first actuator tube 914 and the first outer tube 152 to rotate about the A-A' axis.
- the inner shaft 154 and the second actuator tube 938 rotate about the A-A' axis in response to the second spring loaded plunger lever 908 translating the second spring loaded plunger rod 946 out the first actuator tube opening 957 or the second actuator tube opening 958, and in response to the second geometric gripping surface 912 driving rotation of the inner shaft 154.
- references to "one embodiment”, “an embodiment”, “an example embodiment”, etc. indicate that the embodiment described may include a particular feature, structure, or characteristic, but every embodiment may not necessarily include the particular feature, structure, or characteristic. Moreover, such phrases are not necessarily referring to the same embodiment. Further, when a particular feature, structure, or characteristic is described in connection with an embodiment, it is submitted that it is within the knowledge of one skilled in the art to affect such feature, structure, or characteristic in connection with other embodiments whether or not explicitly described. After reading the description, it will be apparent to one skilled in the relevant art(s) how to implement the disclosure in alternative embodiments.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Transmission Devices (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
Abstract
Description
- The present disclosure is directed to cargo restraint systems and, more particularly, to a cargo restraint system capable of coaxial actuation of restraints.
- Many aircraft have at least one cargo bay designed to receive cargo. Such cargo bays include cargo loading systems that include rollers located on a floor of the cargo bay to provide conveyance for moving a unit load device (ULD) or other cargo through the cargo bay. After cargo has been loaded into the cargo bay, it may be desirable to restrain the cargo. Some ULDs, for example, military pallets, have pockets along the sides of the pallets. Restraints may be located in the pockets to provide longitudinal and/or lateral restraint. Such restraint reduces the likelihood of cargo shifting relative to the cargo bay during taxi, takeoff, flight, and landing. Current restraint actuation systems are generally configured to deploy and to stow all the restraints simultaneously. Such actuating scheme tends to limit the number of available cargo load configurations.
- In various embodiments, a restraint assembly actuation system for use with a cargo restraint system is provided comprising a drive shaft assembly comprising a first outer tube and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis and a first restraint coupled to the first outer tube, wherein the first outer tube is configured to rotate the first restraint about the axis to a raised position to restrain a cargo load.
- In various embodiments, the first restraint comprises a head configured to engage with the cargo load.
- In various embodiments, the first restraint comprises a shroud coupled to the outside of the first outer tube, and a plunger rod coupled to the shroud and the head.
- In various embodiments, the shroud comprises a notch opening configured to receive a notch coupled to the inner shaft and the shroud at a first opening of the first outer tube.
- In various embodiments, the first restraint further comprises the head defining a plunger channel, a plunger including the plunger rod and a plunger lever, the plunger rod being located, at least, partially in the plunger channel, a plunger torsion spring configured to apply a first biasing load to the plunger lever, and a compression spring configured to bias a first end of the plunger away from an upper surface of the head. In various embodiments, a drive cap located around the first end of the plunger rod. In various embodiments, the shroud defines a plunger opening configured to receive the first end of the plunger rod. In various embodiments, the shroud includes a protrusion extending radially outward from an outer circumferential surface of the shroud. In various embodiments, a second outer tube is coupled to the inner shaft and configured to rotate with the inner shaft. In various embodiments, a second restraint is coupled to the second outer tube, wherein the second outer tube is configured to rotate the second restraint about the axis to a raised position to restrain the cargo load. In various embodiments, the second outer tube is located aft of the first outer tube.
- In various embodiments, a coaxial actuator assembly is provided comprising a drive shaft assembly comprising a first outer tube and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis, a first outer tube actuator assembly coupled to the drive shaft assembly, a first actuator tube disposed within the first outer tube actuator assembly and coupled to the first outer tube, wherein the first actuator tube comprises a first actuator opening and a second actuator opening, each disposed in the first actuator tube, a first spring loaded plunger configured to be disposed in at least one of the first actuator opening or the second actuator opening, and a first actuator lever coupled to the first spring loaded plunger, the first actuator lever configured to translate the first spring loaded plunger at least one of in and out the first actuator opening and the second actuator opening, and a first geometric gripping surface coupled to the first outer tube actuator assembly configured to drive rotation of the first outer tube. In various embodiments, the first outer tube rotates coaxially about the axis in response to the first geometric gripping surface driving rotation of the first outer tube. In various embodiments, an inner shaft actuator assembly is coupled to the drive shaft assembly, a second actuator tube disposed within the inner shaft actuator assembly and coupled to the inner shaft, wherein the second actuator tube comprises a first actuator opening and a second actuator opening each disposed in the second actuator tube, a second spring loaded plunger configured to be disposed in the first actuator opening or the second actuator opening, and a second actuator lever coupled to the second plunger, configured to translate the second plunger at least one of in and out the first actuator opening and the second actuator opening, and a second geometric gripping surface coupled to the inner shaft actuator assembly and configured to drive rotation of the inner shaft. In various embodiments, the inner shaft rotates in response to the second geometric gripping surface driving rotation of the inner shaft.
- In various embodiments, a restraint assembly actuation system is provided comprising a drive shaft assembly comprising a first outer tube and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis, a coaxial actuator assembly comprising a first outer tube actuator assembly coupled to the drive shaft assembly, a first actuator tube disposed within the first outer tube actuator assembly and coupled to the first outer tube, wherein the first actuator tube comprises a first actuator opening and a second actuator opening each disposed in the first actuator tube, a first spring loaded plunger configured to be disposed in at least one of the first actuator opening or the second actuator opening, a first actuator lever coupled to the first spring loaded plunger, configured to translate the first spring loaded plunger at least one of in and out the first actuator opening and the second actuator opening, and a first geometric gripping surface coupled to the first outer tube actuator assembly and configured to drive rotation of the first outer tube, a second outer tube coupled to the inner shaft, and a first restraint assembly actuation system comprising a first restraint coupled to the first outer tube, wherein the first outer tube is configured to rotate the first restraint about the axis to a raised position to restrain a cargo load. In various embodiments, a second restraint is coupled to the second outer tube. In various embodiments, the second outer tube is configured to rotate the second restraint about the axis to the raised position to restrain the cargo load. In various embodiments, an inner shaft actuator assembly is coupled to the drive shaft assembly, a second actuator tube disposed within the inner shaft actuator assembly and coupled to the inner shaft, wherein the second actuator tube comprises a first actuator opening and a second actuator opening each disposed in the second actuator tube, a second spring loaded plunger configured to be disposed within at least one of the first actuator opening or the second actuator opening, and a second actuator lever coupled to the second plunger, configured to translate the second plunger at least one of in and out the first actuator opening and the second actuator opening, and a second geometric gripping surface coupled to the inner shaft actuator assembly configured to drive rotation of the inner shaft. In various embodiments, a plurality of forward restraints is coupled to the first outer tube and configured to be actuated by the first outer tube, and a plurality of aft restraints coupled to the second outer tube and configured to rotate coaxially with the second outer tube.
- The foregoing features and elements may be combined in various combinations without exclusivity, unless expressly indicated herein otherwise. These features and elements as well as the operation of the disclosed embodiments will become more apparent in light of the following description and accompanying drawings.
- The subject matter of the present disclosure is particularly pointed out and distinctly claimed in the concluding portion of the specification. A more complete understanding of the present disclosures, however, may best be obtained by referring to the detailed description and claims when considered in connection with the drawing figures, wherein like numerals denote like elements.
-
FIG. 1 illustrates an aircraft being loaded with cargo, in accordance with various embodiments; -
FIG. 2 illustrates a portion of an aircraft cargo deck having a cargo restraint system, in accordance with various embodiments; -
FIG. 3 illustrates a portion of the cargo restraint system ofFIG. 2 , in accordance with various embodiments; -
FIGS. 4A and 4B illustrate a first restraint of a restraint assembly actuation system for use with the cargo restraint system ofFIG. 2 , in a raised position and a stowed position, respectively, in accordance with various embodiments; -
FIGS. 5A and5B illustrate the first restraint of the restraint assembly actuation system for use with the cargo restraint system ofFIG. 2 , in the raised position, in accordance with various embodiments; -
FIG. 6 illustrates a cross-section view of the first restraint of the restraint assembly actuation system for use with the cargo restraint system ofFIG. 2 , in the raised position, with the cross-section taken along the line 6-6 inFIG. 5B ; -
FIGs. 7A ,7B ,7C ,7D and7E illustrate a cross-section view of the first restraint of the restraint assembly actuation system for use with the cargo restraint system ofFIG. 2 , taken along the line 6-6 inFIG. 5B as the first restraint translates from the raised position to the stowed position, in accordance with various embodiments; -
FIG. 8 illustrates a cross-section view of the second restraint of the restraint assembly actuation system for use with the cargo restraint system ofFIG. 2 taken along the line 6-6 inFIG. 5B ; -
FIG. 9 illustrates a coaxial actuator assembly, in accordance with various embodiments; -
FIG. 10 illustrates a cross-section view of a first outer tube actuator assembly of the coaxial actuator assembly inFIG. 9 ; -
FIG. 11 illustrates a cross-section view of an inner shaft actuator assembly of the coaxial actuator assembly inFIG. 9 ; and -
FIG. 12 illustrates a restraint assembly actuation system, in accordance with various embodiments. - The detailed description of exemplary embodiments herein makes reference to the accompanying drawings, which show exemplary embodiments by way of illustration and their best mode. While these exemplary embodiments are described in sufficient detail to enable those skilled in the art to practice the disclosure, it should be understood that other embodiments may be realized and that logical, chemical, and mechanical changes may be made without departing from the spirit and scope of the disclosure. Thus, the detailed description herein is presented for purposes of illustration only and not of limitation. For example, the steps recited in any of the method or process descriptions may be executed in any order and are not necessarily limited to the order presented. Furthermore, any reference to singular includes plural embodiments, and any reference to more than one component or step may include a singular embodiment or step. Also, any reference to attached, fixed, connected or the like may include permanent, removable, temporary, partial, full and/or any other possible attachment option. Additionally, any reference to without contact (or similar phrases) may also include reduced contact or minimal contact.
- The present disclosure provides a restraint assembly actuation system for aircraft cargo that, in various embodiments, utilizes a coaxial actuator assembly to actuate (e.g., using any appropriate motion or combination of motions) one or more restraints from a raised (or deployed) position to a stowed position. In accordance with various embodiments, the restraint assembly actuation system includes a drive shaft assembly comprising a first outer tube and an inner shaft disposed coaxially about an axis. In various embodiments, the inner shaft can be another tube and not a solid shaft. Multiple tubes may be disposed in the system coaxially about the axis without a solid inner shaft. In various embodiments, a first restraint or a plurality of first restraints may be coupled to a first outer tube. The cargo restraint system, in various embodiments, also comprises one or more coaxial actuator assemblies. A coaxial actuator assembly, in various embodiments, comprises a first outer tube actuator assembly coupled to the drive shaft assembly. The first outer tube actuator assembly, in various embodiments, controls rotation of the first outer tube located about the axis. Translation of the first restraint or a plurality of first restraints may be controlled by rotation of the first outer tube.
- In accordance with various embodiments, a coaxial actuation assembly may comprise an inner shaft actuator assembly configured to control rotation of the inner shaft. At or near an aft end of the inner shaft, in various embodiments, an extender tube may be coupled to the inner shaft. A second outer tube may be coupled to the inner shaft at the extender tube, such that rotation of the inner shaft is translated to the second outer tube. Translation of a second restraint or a plurality of second restraints may be controlled by rotation (e.g., actuation) of the second outer tube. Allowing the restraints to be actuated as in at least two groups allows for more flexible control options than a single actuation system that actuates all restraints at once, while increasing the number of available restraining configurations throughout the cargo deck.
-
FIG. 1 illustrates anaircraft 20 withcargo 22 being loadable through aloading door 24 of theaircraft 20.Cargo 22 may be loaded throughloading door 24 and onto acargo deck 26.FIG. 2 illustratescargo deck 26. An X-Y-Z axis is shown in various drawings to illustrate various orientations of components.Cargo deck 26 includes acargo deck floor 30, which may be formed by one ormore panels 32 that are coupled to various structural components of aircraft 20 (e.g., to beams, floors, etc.). - In accordance with various embodiments,
FIG. 2 illustratescargo deck 26 includes a restraintassembly actuation system 50. Stated differently, restraintassembly actuation system 50 may be installed alongcargo deck 26.Cargo deck 26 may also include acargo loading system 60 comprising a plurality of freely rotating conveyance rollers and/or powder drive units (PDUs) mounted in thecargo deck 26 to define the conveyance plane. Cargo loaded onto theaircraft cargo deck 26 can be moved throughout thecargo deck 26 using thecargo loading system 60. - Restraint
assembly actuation system 50 may be used to restrain cargo (e.g., unit load devices (ULDs)) within/relative to thecargo deck 26. The restraintassembly actuation system 50 may include a plurality offirst restraints 102a, one or moresecond restraints 104, and a plurality ofthird restraints 106. In various embodiments, thefirst restraints 102 may be referred to as X-restraints as they may restrict cargo from translating in the X (or longitudinal) direction. Thesecond restraints 104 may be referred to as Z-restraints as they may restrict cargo from translating in the Z (e.g., vertical) direction. Thethird restraints 106 may be referred to as YZ-restraints as they may restrict translation of cargo in the Z (e.g., vertical) direction and the Y (e.g., lateral) direction. However, one skilled in the art will realize that therestraints first restraints 102 may restrain cargo in the Y direction). The restraintassembly actuation system 50 may include acoaxial actuator assembly 110. Acontrol region 112 ofcoaxial actuator assembly 110 may be located, for example,proximate loading door 24, a forward end of the aircraft, and/or at any other location that may be readily accessible to crew responsible for loading cargo intocargo deck 26. As described in further detail below, various components ofcoaxial actuator assembly 110 may be located underpanels 32.Coaxial actuator assembly 110 is configured to control the actuation of thefirst restraints 102. In this regard,coaxial actuator assembly 110 may be employed to translatefirst restraints 102 between a raised position and a stowed position. In various embodiments,coaxial actuator assembly 110 may also control actuation of thesecond restraints 104 and/or thethird restraints 106. -
FIG. 3 illustrates how the various restraints of restraintassembly actuation system 50 may restrain aULD 114. As shown, thefirst restraint 102 may rest betweentabs ULD 114, restricting movement of theULD 114 in the X direction. Thesecond restraint 104 may rest abovetabs ULD 114, thus restricting movement of theULD 114 in the Z direction. Thethird restraint 106 may rest adjacent and above thetab 118 of theULD 114, thus restricting movement of theULD 114 in the Y and Z directions. - Referring now to
FIGS. 4A and FIG. 4B , additional details of afirst restraint 102 are shown. As shown,first restraint 102 may be actuated between a raised position (as shown inFIG. 4A ) and a stowed position (as shown inFIG. 4B ).First restraint 102 may include a head 120 (also referred to herein as a restraint body) which may be both raised and stowed. In the raised position, thehead 120 may extend above thecargo deck floor 30. In the stowed position, thehead 120 may fit within anorifice 122 formed in thecargo deck floor 30. For example,panel 32 may define anorifice 122 configured to receive ahead 120. In the stowed position, afirst surface 124 ofhead 120 may be relatively/substantially flush and/or planar with anupper surface 36 thepanel 32. - With momentary reference to
FIG. 12 , restraintassembly actuation system 50 is further illustrated. Restraintassembly actuation system 50 comprisesfirst group 360 ofrestraints 102a andsecond group 362 ofrestraints 102b. Restraintassembly actuation system 50 further comprises driveshaft assembly 150. Driveshaft assembly 150 comprisesinner shaft 154 and firstouter tube 152, which are coaxially disposed as described herein along axis A-A', with A representing the forward terminus ofdrive shaft assembly 150 and A' representing the aft terminus ofdrive shaft assembly 150.Coaxial actuator assembly 110 is illustrated comprising innershaft actuator assembly 976 and first outertube actuator assembly 975.Inner shaft 154 is coupled to innershaft actuator assembly 976, where innershaft actuator assembly 976 is configured to rotateinner shaft 154 about axis A-A'. Firstouter tube 152 is coupled to first outertube actuator assembly 975, where first outertube actuator assembly 975 is configured to rotate firstouter tube 152 about axis A-A'. - First
outer tube 152 is configured, as shown and described herein, to actuaterestraints 102a. In that regard, rotation of firstouter tube 152 imparted by first outertube actuator assembly 975 causes actuation ofrestraints 102a.Restraints 102b, however, remain stationary and are thus not activated by rotation of firstouter tube 152 imparted by first outertube actuator assembly 975. Rotation ofinner shaft 154 imparted by innershaft actuator assembly 976 causes actuation ofrestraints 102b. In that manner,first group 360 are separately actuated fromsecond group 362. Stated another way, restraintassembly actuation system 50 allows one group of restraints to be actuated independently of a second group of restraints. - In various embodiments, first
outer tube 152 terminates along axis A-A'.Inner shaft 154 may be coupled to secondouter tube 352. Secondouter tube 352 may be fixedly attached toinner shaft 154 such that rotation ofinner shaft 154 rotates secondouter tube 352. In that regard, in various embodiments,inner shaft 154 rotates an extender tube such that secondouter tube 352 rotates one revolution for every one revolution rotated byinner shaft 154. Secondouter tube 352 may be fixedly attached toinner shaft 154 by any suitable means, for example, by press fit, interference fit, fasteners, threaded engagement, radially disposed pins, and/or welding, brazing, or other metallurgical joinery. Secondouter tube 352 may be coupled toinner shaft 154 via intermediary components, such as a collar or cylindrical clamp. - With reference to
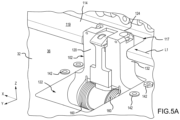
FIG. 5A andFIG. 5B ,first restraint 102 is illustrated in the raised position. InFIG. 5B ,panel 32 is removed to illustrate components of restraintassembly actuation system 50 that may be located underupper surface 36 ofpanel 32. In various embodiments,first restraint 102 may include one or more roller(s). Rollers may protrude fromside surfaces 132 ofhead 120. Rollers may be spring loaded such that rollers retract intohead 120, against the bias of a spring, in response to a load (represented by arrow L1) being transmitted fromULD 114 into the roller and consequentlyfirst restraint 102.First restraint 102 may be raised into (e.g., located within) apocket 117 ofULD 114.Pocket 117 may be defined by aflange 119 located about a perimeter ofULD 114. In embodiments, load L1 may be transmitted fromULD 114 intofirst restraint 102. The rollers may reduce friction betweenULD 114 andfirst restraint 102 whenfirst restraint 102 translates between the raised position (as shown inFIG. 4A andFIG. 5A ) and the stowed position (as shown inFIG. 4B ). In this manner,first restraint 102 may allow for lower release forces when moving from the raised position to the stowed position to releaseULD 114. Stated differently, forces reacting betweenULD 114 andfirst restraint 102 are attenuated by the rollers to increase ease of movement of first restraint 102 (relative to ULD 114) when moving between the raised position and the stowed position. - A mount 140 (
FIG. 5B ) may be coupled topanel 32 viafasteners 142.Fasteners 142 can be washers and a bolt head, or any other suitable fastener. In accordance with various embodiments, adrive shaft assembly 150 may be located through, and may extend through, mount 140 andhead 120. Stated differently, mount 140 andhead 120 may be located on, and/or mounted on, driveshaft assembly 150.Mount 140 may be a stationary structure.Head 120 and driveshaft assembly 150 may rotate relative to mount 140. Driveshaft assembly 150 includes a firstouter tube 152 and aninner shaft 154. Firstouter tube 152 is located about inner shaft 154 (e.g., firstouter tube 152 andinner shaft 154 are coaxially disposed). In accordance with various embodiments, firstouter tube 152 andinner shaft 154 may both coaxially rotate about an axis A-A'. However, firstouter tube 152 rotates independently ofinner shaft 154. In this regard, rotation ofinner shaft 154 may be performed independently from first outer tube 152 (i.e., rotation ofinner shaft 154 does not cause or impart rotation/movement of first outer tube 152) and rotation of firstouter tube 152 may be performed independently from inner shaft 154 (i.e., rotation of firstouter tube 152 does not cause or impart rotation/movement of inner shaft 154). - In various embodiments, a lubricant may be applied to the outside of the inner shaft to reduce friction between the first outer tube and the inner shaft. The lubricant may comprise oil or grease. In various embodiments, the outside of the inner shaft or the inside of the first outer tube may be coated in polytetrafluoroethylene to reduce friction between the first outer tube and the inner shaft. In various embodiments, the inner shaft and/or the first outer tube may comprise a wear coating disposed on one or more surfaces to provide corrosion resistance and/or mitigation of friction or abrasion.
-
First restraint 102 may include one or more head torsion spring(s) 160.Head torsion spring 160 is configured to biashead 120 toward the raised position or the stowed position. Stated differently,head torsion spring 160 is configured to biashead 120 in a first circumferential direction about axis A-A'. As described in further detail below,first restraint 102 includes a plunger 170 (FIG. 6 ), which may engage firstouter tube 152, such that rotation of firstouter tube 152 is transferred tohead 120. Stated differently, when theplunger 170 is in an engaged state,head 120 rotates with firstouter tube 152. - With reference to
FIG. 6 , a cross-section view offirst restraint 102, taken along line 6-6 inFIG. 5B , is illustrated. In accordance with various embodiments,first restraint 102a includes aplunger 170. InFIG. 6 ,first restraint 102 is in the raised position andplunger 170 is in an engaged state.Plunger 170 includes aplunger rod 172 and aplunger lever 174.Plunger rod 172 is configured to translate radially (i.e., perpendicular to axis A-A'). In this regard,plunger rod 172 translates toward and away from firstouter tube 152. In various embodiments,plunger rod 172 may located in aplunger channel 176 defined byhead 120. Acompression spring 180 may be located aboutplunger rod 172.Compression spring 180 may be compressed between aspring interference surface 182 ofplunger rod 172 and abushing 184 located aboutplunger rod 172. In various embodiments, bushing 184 may be eliminated andcompression spring 180 may be compressed betweenspring interference surface 182 ofplunger rod 172 and a second spring interference formed byhead 120.Compression spring 180 biases afirst end 186 of plunger rod in the radially inward direction (i.e., toward firstouter tube 152 and axis A-A). - A
pin 188 may be located throughplunger rod 172 andplunger lever 174.Pin 188 may be located proximate asecond end 190 ofplunger rod 172.Second end 190 is oppositefirst end 186.Plunger lever 174 may rotate aboutpin 188. Aplunger torsion spring 192 may be located aboutpin 188 and may apply a biasing load toplunger lever 174.Plunger torsion spring 192 may biasplunger lever 174 in the first circumferential direction aboutpin 188. - In accordance with various embodiments, a
shroud 200 may be located about firstouter tube 152. Stated differently, an innercircumferential surface 202 ofshroud 200 may define a tube channel configured to receive firstouter tube 152. In accordance with various embodiments, aplunger opening 206 is formed in the outercircumferential surface 208 ofshroud 200. Stated differently,shroud 200 definesplunger opening 206.Plunger opening 206 is configured to receivefirst end 186 ofplunger rod 172. Locatingplunger rod 172 inplunger opening 206 creates an interference betweenplunger rod 172 andshroud 200, such thatplunger rod 172 is prevented from translating relative toshroud 200. In accordance with various embodiments,shroud 200 defines a notch opening (e.g., a bore) 210 configured to receive anotch 212. Firstouter tube 152 may define anotch channel 214.Notch 212 may be located throughnotch opening 210 and innotch channel 214, in response to radially aligningnotch opening 210 andnotch channel 214. Locatingnotch 212 innotch opening 210 andnotch channel 214rotationally couples shroud 200 and firstouter tube 152, such that rotation of firstouter tube 152 about axis A-A' causesshroud 200 to rotate about axis A-A'.Inner shaft 154 is shown extending through axis A-A', axis A-A' being the common axis for both firstouter tube 152 andinner shaft 154. -
Shroud 200 includes aprotrusion 220.Protrusion 220 extends radially outward from outercircumferential surface 208 ofshroud 200. Adrive cap 222 may be located aroundfirst end 186 ofplunger rod 172, and betweenplunger rod 172 andhead 120. Whenplunger 170 is an engaged state (i.e., whenplunger rod 172 is in plunger opening 206),protrusion 220 may be located proximate and/or may abut drivecap 222. Whenplunger 170 is the engaged state, rotation of firstouter tube 152 about axis A-A' causesshroud 200 to rotate in the same direction about axis A-A' as firstouter tube 152 due to the contact betweennotch 212 and firstouter tube 152 and the contact betweennotch 212 andshroud 200. The rotation ofshroud 200 causes head 120 to rotate in the same direction about axis A-A' as firstouter tube 152 due to the contact betweenprotrusion 220 and drivecap 222. In this regard, a rotational force is transferred fromshroud 200 to head 120 via contact betweenprotrusion 220 and drivecap 222. - When
plunger rod 172 is radially aligned withplunger opening 206,compression spring 180 forces first end 186 ofplunger rod 172 into plunger opening 206 (i.e., plunger is forced into the engaged state). Whenplunger rod 172 is located inplunger opening 206, the location ofsecond end 190 and pin 188 generate an interference between afirst lever surface 232 ofplunger lever 174 and a firstlever interference surface 234 ofhead 120. In accordance with various embodiments,plunger torsion spring 192 is configured to biasfirst lever surface 232 toward firstlever interference surface 234. The interference (e.g., contact) betweenfirst lever surface 232 and firstlever interference surface 234 blocks, or prevents, further rotation ofplunger lever 174 in the first circumferential direction about 188 (i.e., the inference overcomes the biasing load being applied by plunger torsion spring 192). In the engaged state,plunger lever 174 may be located radially inward of anupper surface 236 ofhead 120. In this regard, adistance plunger lever 174 and axis A-A' may be less than a distance betweenupper surface 236 and axis A-A'.Upper surface 236 may be approximately perpendicular tofirst surface 124 and side surfaces 132 (FIG. 5B ). As used in the previous context only, "approximately" means ± 15° from perpendicular. In accordance with various embodiments, the spring constant ofcompression spring 180 is great enough to overcome the biasing load applied byplunger torsion spring 192. - With reference to
FIG. 7A , a cross-section view offirst restraint 102, taken along line 6-6 inFIG. 5B , is illustrated, withfirst restraint 102 in the raised position andplunger 170 in a disengaged state. To translateplunger 170 from the engaged state (FIG. 6 ) to the disengaged state (FIG. 7A ), a load L2 is applied in a second circumferential about pin 188 (e.g., in a direction opposite the biasing force applied by plunger torsion spring 192). The load L2, along with an interference between afirst end 240 ofplunger lever 174 and a secondlever interference surface 242 ofhead 120,force pin 188,second end 190 ofplunger rod 172, andfirst lever surface 232 away from firstlever interference surface 234 ofhead 120. The translation ofplunger rod 172 away from axis A-A' causesfirst end 186 ofplunger rod 172 to translate out ofplunger opening 206. The translation ofplunger rod 172 away from axis A-A' also compressescompression spring 180 betweenspring interference surface 182 andbushing 184. - With reference to
FIG. 7B , a cross-section view offirst restraint 102, taken along line 6-6 inFIG. 5B , is illustrated, withplunger 170 in the disengaged state andfirst restraint 102 beginning to translate toward the stowed position. In response tofirst end 186 ofplunger rod 172 being located outside ofplunger opening 206,head 120 can rotate aboutshroud 200. Stated differently, locatingfirst end 186 ofplunger rod 172 radially outward of outercircumferential surface 208 removes the interference betweenshroud 200 andplunger rod 172, thereby allowingfirst end 186 ofplunger rod 172 to translate circumferentially about axis A-A' and along the outercircumferential surface 208 ofshroud 200.Shroud 200 does not rotate due to the contact betweennotch 212 and firstouter tube 152. Withplunger 170 in the disengaged state,head 120 can be rotated in a second circumferential direction aboutshroud 200, firstouter tube 152, and axis A-A' (e.g., toward the stowed position) in response to a load L3 greater than the biasing force ofhead torsion spring 160 being applied tohead 120. - As
head 120 is rotated in the second circumferential direction, outercircumferential surface 208 blocks first end 186 ofplunger rod 172 from translating radially inward (i.e., toward axis A-A'), thereby maintaining the distance betweenpin 188 and firstlever interference surface 234 ofhead 120 and betweensecond end 190 ofplunger rod 172 and firstlever interference surface 234. The increased distance from firstlever interference surface 234, along with the biasing force applied byplunger torsion spring 192, forces plungerlever 174 to rotate in the first circumferential direction aboutpin 188.Plunger lever 174 may rotate untilfirst lever surface 232 contacts head 120 (e.g., untilplunger lever 174 contacts first lever interference surface 234). In the disengaged state,first end 240 ofplunger lever 174 may be located aboveupper surface 236 ofhead 120. Stated differently, a distance betweenfirst end 240 ofplunger lever 174 and axis A-A' may be greater than the distance betweenupper surface 236 ofhead 120 and axis A-A', whenplunger 170 is in the disengaged state. - With reference to
FIGs. 7C and7D , ashead 120 is rotated towardpanel 32, contact is generated between avertical surface 260 ofpanel 32 andplunger lever 174.Vertical surface 260 may be approximately perpendicular toupper surface 36 of panel 32 (FIG. 5B ). As used in the previous context only, "approximately" means ± 15° from perpendicular. The contact betweenvertical surface 260 andplunger lever 174 overcomes the biasing force applied byplunger torsion spring 192, thereby forcingplunger lever 174 to rotate aboutpin 188 in the second circumferential direction about 188 (i.e., in a direction opposite the direction of the biasing load applied by plunger torsion spring 192). Stated differently, the contact betweenvertical surface 260 andplunger lever 174 translatesfirst end 240 ofplunger lever 174 toward secondlever interference surface 242, thereby decreasing the distance betweenfirst end 240 ofplunger lever 174 and axis A-A'. - With reference to
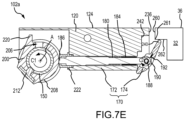
FIG. 7E , a cross-section view offirst restraint 102, taken along line 6-6 inFIG. 5B , is illustrated, withplunger 170 in the disengaged state andfirst restraint 102 in the stowed position. In response tofirst end 240 ofplunger lever 174 translating past the edge ofvertical surface 260,plunger torsion spring 192 forces plungerlever 174 toward rotate in the first circumferential direction aboutpin 188, thereby forcingfirst end 240 to translate past (e.g., above)upper surface 236 ofhead 120. Load L3 (FIG. 7D ) may be removed from, and/or no longer applied to,head 120 in response tofirst end 240 ofplunger lever 174 translating past the edge ofvertical surface 260. In response to the load L3 being removed fromhead 120,head torsion spring 192 may biashead 120 in the first circumferential direction about axis A-A'. The biasing force ofhead torsion spring 160 forces first end 240 of plunger lever 274 toward alower surface 262 ofpanel 32.Lower surface 262 of panel is oriented away fromupper surface 36 of panel. The contact betweenfirst end 240 ofplunger lever 174 andlower surface 262 ofpanel 32 maintainshead 120 in the stowed position. Stated differently, the interference betweenplunger lever 174 andlower surface 262 preventsfirst restraint 102 from translating to the raised position. - With reference to
FIGs. 8 , a cross-section view ofsecond restraint 102b, taken along line 6-6 inFIG. 5B , is illustrated, with the plunger in the disengaged state and prior tosecond restraint 102b being translated from the stowed state toward the raised state.second restraint 102b is substantially similar tofirst restraint 102a, thoughsecond restraint 102b is actuated by secondouter tube 352. In accordance with various embodiments, to translatesecond restraint 102b from the stowed position to the raised position,plunger 170 is translated to the engaged position, thereby rotationally couplinghead 120 toshroud 200 and firstouter tube 152. In this regard, secondouter tube 352 is rotated about axis A-A', thereby causingshroud 200 to rotate about axis A-A'. The rotation ofshroud 200 bringsprotrusion 220 ofshroud 200 into contact withdrive cap 222.Protrusion 220 and drivecap 222 are configured such thatplunger opening 206 is radially aligned with thefirst end 186 ofplunger rod 172 whenprotrusion 220 contacts drivecap 222, however, the frictional force betweenlower surface 262 andplunger lever 174 be preventplunger rod 172 from translating intoplunger opening 206. In this regard, the contact betweenprotrusion 220 and drivecap 222 may forcehead 120 to rotate in the second circumferential direction about axis A-A' (i.e., away from the raised position and in the direction opposite the direction of the biasing load applied by head torsion spring 160). The rotation ofhead 120 in the second circumferential direction about axis A-A' forces first end 240 ofplunger lever 174 away fromlower surface 262 ofpanel 32. - With additional reference to
FIG. 12 ,inner shaft 154 drives rotation of secondouter tube 352. In that regard, innershaft actuator assembly 976 may be used to rotateinner shaft 154 to cause actuation of second restrain 102b. - With reference to
FIG. 9 ,coaxial actuator assembly 110 is illustrated, in accordance with various embodiments is illustrated.Coaxial actuator assembly 110 may couple withdrive shaft assembly 150, wherein the firstouter tube 152 and theinner shaft 154 are disposed coaxially about the A-A' axis.Coaxial actuator assembly 110 comprises innershaft actuator assembly 976 and first outertube actuator assembly 975. First outertube actuator assembly 975 includes a first spring loadedplunger lever 906. Additionally,coaxial actuator assembly 110 includes innershaft actuator assembly 976 coupled to thedrive shaft assembly 150. Second spring loadedplunger lever 908 may be coupled to the innershaft actuator assembly 976. - First outer
tube actuator assembly 975 further includes a first geometric gripping surface 910. Innershaft actuator assembly 976 includes a second geometric grippingsurface 912. A tool may be used to grip on and rotate the first geometric gripping surface 910 or the second geometric grippingsurface 912. The tool may be a wrench, channel lock pliers, pliers or any other suitable tool which can grip on to a geometric surface and impart rotation around the axis. The tool may also be a motorized system, such as an electromechanical actuator and/or electric motor such as a brushless DC motor, which may receive a command to rotate the first geometric gripping surface 910 or second geometric grippingsurface 912 in response to a rotational command by a controller. The rotational command may be transmitted by the controller to the motorized system in response to a switch being activated. - With reference to
FIG. 9 andFIG. 10 , a cross-section view of first outertube actuator assembly 975 of thecoaxial actuator assembly 110 inFIG. 9 is illustrated. The first outertube actuator assembly 975 may comprise afirst actuator tube 914 disposed within the first outertube actuator assembly 975. Thefirst actuator tube 914 is coupled to the firstouter tube 152 at afirst notch 916 and asecond notch 918. Thefirst notch 916 and thesecond notch 918 may be extensions of the firstouter tube 152 which are configured to rotate the firstouter tube 152 in response to rotation of thefirst actuator tube 914. Thefirst notch 916 and thesecond notch 918 may be disposed on opposite sides of the firstouter tube 152. Rotation of thefirst actuator tube 914 about axis A-A' causes firstouter tube 152 to rotate in the same direction about axis A-A' asfirst actuator tube 914 due to the contact betweenfirst notch 916 andfirst actuator tube 914 and the contact betweensecond notch 918 andfirst actuator tube 914. - A first spring loaded
plunger 924 is disposed within the first outertube actuator assembly 975, and the first spring loadedplunger 924 includes a first spring loadedplunger rod 926 and the first spring loadedplunger lever 906. First spring loadedplunger rod 926 is configured to translate radially (i.e., perpendicular to axis A-A'). In this regard, first spring loadedplunger rod 926 translates toward and away from firstouter tube 152. In various embodiments, first spring loadedplunger rod 926 may be located in a first spring loadedplunger channel 928. Acompression spring 930 may be located about first spring loadedplunger rod 926.Compression spring 930 may be compressed between a firstspring interference surface 932 and asecond spring interference 934 formed by the first spring loadedplunger rod 926.Compression spring 930 biases a first end of plunger rod in the radially inward direction (i.e., toward firstouter tube 152 and axis A-A).Compression spring 930 comprises any suitable spring, such as a coil spring, leaf spring, Belleville spring, or the like - A first
actuator lever pin 936 may be located through first spring loadedplunger rod 926 and first spring loadedplunger lever 906. Firstactuator lever pin 936 may be located proximate a second end of first spring loadedplunger rod 926. The second end of first spring loadedplunger rod 926 is opposite the first end. First spring loadedplunger lever 906 may rotate about firstactuator lever pin 936. A first plunger torsion spring may be located about firstactuator lever pin 936 and may apply a biasing load to first spring loadedplunger lever 906. First plunger torsion spring may bias first spring loadedplunger lever 906 in the first circumferential direction about firstactuator lever pin 936. - The
first actuator tube 914 also comprises a firstactuator tube opening 920 and a secondactuator tube opening 922. The first spring loadedplunger 924 is configured to fit into the firstactuator tube opening 920 and the secondactuator tube opening 922. When the first spring loadedplunger 924 is in the firstactuator tube opening 920 or the secondactuator tube opening 922, then thefirst actuator tube 914 and the firstouter tube 152 are prevented from rotating about the A-A' axis. In response to a force exerted on the first spring loadedplunger lever 906 in the direction towards thedrive shaft assembly 150, the first spring loadedplunger rod 926 translates in the direction opposite the firstouter tube 152 and perpendicular to the A-A' axis. This allows both thefirst actuator tube 914 and the firstouter tube 152 to rotate about the A-A' axis. The firstouter tube 152 and thefirst actuator tube 914 coaxially rotate about the A-A' axis in response to the first spring loadedplunger lever 906 translating the first spring loadedplunger 924 out of the firstactuator tube opening 920 or the secondactuator tube opening 922, and in response to the first geometric gripping surface 910 driving rotation of the firstouter tube 152. - With reference to
FIG. 9 andFIG. 11 , a cross-section view of the comprises innershaft actuator assembly 976 of thecoaxial actuator assembly 110 inFIG. 9 is illustrated. The innershaft actuator assembly 976 comprises asecond actuator tube 938.Second actuator tube 938 is coupled to theinner shaft 154 at afirst notch 940 and asecond notch 942. Thefirst notch 940 and thesecond notch 942 may be extensions of theinner shaft 154 which are configured to rotate theinner shaft 154 in response to rotation of thesecond actuator tube 938. Thefirst notch 940 and thesecond notch 942 may be disposed on opposite sides of theinner shaft 154. Rotation of thesecond actuator tube 938 about axis A-A' causesinner shaft 154 to rotate in the same direction about axis A-A'second actuator tube 938 due to the contact betweenfirst notch 940 andsecond actuator tube 938 and the contact betweensecond notch 942 andsecond actuator tube 938. - A first spring loaded
plunger 944 is disposed within innershaft actuator assembly 976, and the first spring loadedplunger 944 includes a second spring loadedplunger rod 946 and the second spring loadedplunger lever 908. Second spring loadedplunger rod 946 is configured to translate radially (i.e., perpendicular to axis A-A'). In this regard, second spring loadedplunger rod 946 translates toward and away frominner shaft 154. In various embodiments, second spring loadedplunger rod 946 may be located in a second spring loadedplunger channel 948.Compression spring 950 may be located about second spring loadedplunger rod 946.Compression spring 950 may be compressed between firstspring interference surface 952 and asecond spring interference 954 formed by the second spring loadedplunger rod 946.Compression spring 950 biases a first end of second spring loadedplunger rod 946 in the radially inward direction (i.e., towardinner shaft 154 and axis A-A).Compression spring 950 comprises any suitable spring, such as a coil spring, leaf spring, Belleville spring, or the like - A first
actuator lever pin 956 may be located through second spring loadedplunger rod 946 and second spring loadedplunger lever 908. Firstactuator lever pin 956 may be located proximate a second end of second spring loadedplunger rod 946. The second end of second spring loadedplunger rod 946 is opposite the first end. Second spring loadedplunger lever 908 may rotate about firstactuator lever pin 956. A first plunger torsion spring may be located about firstactuator lever pin 956 and may apply a biasing load to second spring loadedplunger lever 908. First plunger torsion spring may bias first spring loadedplunger lever 906 second spring loadedplunger lever 908 in the first circumferential direction about firstactuator lever pin 956. -
Second actuator tube 938 also comprises a firstactuator tube opening 957 and a secondactuator tube opening 958. The spring loadedplunger 944 is configured to fit into the firstactuator tube opening 957 and the secondactuator tube opening 958. When the spring loadedplunger 944 is in the firstactuator tube opening 957 or the secondactuator tube opening 958, then thesecond actuator tube 938 and theinner shaft 154 are prevented from rotating about the A-A' axis. In response to a force exerted in the direction towards thedrive shaft assembly 150 to the second spring loadedplunger lever 908, then the second spring loadedplunger rod 946 translates in the direction opposite theinner shaft 154 and perpendicular to the A-A' axis and allows both thefirst actuator tube 914 and the firstouter tube 152 to rotate about the A-A' axis. Theinner shaft 154 and thesecond actuator tube 938 rotate about the A-A' axis in response to the second spring loadedplunger lever 908 translating the second spring loadedplunger rod 946 out the firstactuator tube opening 957 or the secondactuator tube opening 958, and in response to the second geometric grippingsurface 912 driving rotation of theinner shaft 154. - Benefits, other advantages, and solutions to problems have been described herein with regard to specific embodiments. Furthermore, the connecting lines shown in the various figures contained herein are intended to represent exemplary functional relationships and/or physical couplings between the various elements. It should be noted that many alternative or additional functional relationships or physical connections may be present in a practical system. However, the benefits, advantages, solutions to problems, and any elements that may cause any benefit, advantage, or solution to occur or become more pronounced are not to be construed as critical, required, or essential features or elements of the disclosure. The scope of the disclosure is accordingly to be limited by nothing other than the appended claims, in which reference to an element in the singular is not intended to mean "one and only one" unless explicitly so stated, but rather "one or more." Moreover, where a phrase similar to "at least one of A, B, or C" is used in the claims, it is intended that the phrase be interpreted to mean that A alone may be present in an embodiment, B alone may be present in an embodiment, C alone may be present in an embodiment, or that any combination of the elements A, B and C may be present in a single embodiment; for example, A and B, A and C, B and C, or A and B and C. Different cross-hatching is used throughout the figures to denote different parts but not necessarily to denote the same or different materials.
- Systems, methods, and apparatus are provided herein. In the detailed description herein, references to "one embodiment", "an embodiment", "an example embodiment", etc., indicate that the embodiment described may include a particular feature, structure, or characteristic, but every embodiment may not necessarily include the particular feature, structure, or characteristic. Moreover, such phrases are not necessarily referring to the same embodiment. Further, when a particular feature, structure, or characteristic is described in connection with an embodiment, it is submitted that it is within the knowledge of one skilled in the art to affect such feature, structure, or characteristic in connection with other embodiments whether or not explicitly described. After reading the description, it will be apparent to one skilled in the relevant art(s) how to implement the disclosure in alternative embodiments.
- Furthermore, no element, component, or method step in the present disclosure is intended to be dedicated to the public regardless of whether the element, component, or method step is explicitly recited in the claims. As used herein, the terms "comprises", "comprising", or any other variation thereof, are intended to cover a non-exclusive inclusion, such that a process, method, article, or apparatus that comprises a list of elements does not include only those elements but may include other elements not expressly listed or inherent to such process, method, article, or apparatus.
Claims (15)
- A restraint assembly actuation system for use with a cargo restraint system, comprising:a drive shaft assembly (150) comprising a first outer tube (152) and an inner shaft (154), wherein the first outer tube and the inner shaft are disposed coaxially about an axis; anda first restraint (102a) coupled to the first outer tube, wherein the first outer tube is configured to rotate the first restraint about the axis to a raised position to restrain a cargo load.
- The restraint assembly actuation system of claim 1, wherein the first restraint comprises a head (120) configured to engage with the cargo load.
- The restraint assembly actuation system of claim 2, wherein the first restraint comprises a shroud (200) coupled to the outside of the first outer tube, and a plunger rod (172) coupled to the shroud and the head.
- The restraint assembly actuation system of claim 3, wherein the shroud (200) comprises a notch opening (210) configured to receive a notch (212) coupled to the inner shaft and the shroud at a first opening of the first outer tube.
- The restraint assembly actuation system of claim 4, the first restraint further comprising:the head (120) defining a plunger channel;a plunger including the plunger rod (172) and a plunger lever (174), the plunger rod being located, at least, partially in the plunger channel;a plunger torsion spring (192) configured to apply a first biasing load to the plunger lever (174); anda compression spring (180) configured to bias a first end of the plunger away from an upper surface of the head.
- The restraint assembly actuation system of claim 5, further comprising a drive cap (222) located around the first end of the plunger rod (172), and preferably wherein the shroud (200) defines a plunger opening configured to receive the first end of the plunger rod (172), and more preferably wherein the shroud (200) includes a protrusion (220) extending radially outward from an outer circumferential surface of the shroud.
- The restraint assembly actuation system of claim 1, further comprising a second outer tube (352) coupled to the inner shaft and configured to rotate with the inner shaft.
- The restraint assembly actuation system of claim 7, further comprising a second restraint (104) coupled to the second outer tube, wherein the second outer tube is configured to rotate the second restraint about the axis to a raised position to restrain the cargo load.
- The restraint assembly actuation system of claim 8, wherein the second outer tube (352) is located aft of the first outer tube.
- A coaxial actuator assembly, comprising:a drive shaft assembly (150) comprising a first outer tube (152) and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis;a first outer tube actuator assembly (975) coupled to the drive shaft assembly (150);a first actuator tube (914) disposed within the first outer tube actuator assembly (975) and coupled to the first outer tube (152), wherein the first actuator tube comprises a first actuator opening and a second actuator opening, each disposed in the first actuator tube;a first spring loaded plunger (924) configured to be disposed in at least one of the first actuator opening or the second actuator opening; anda first actuator lever coupled to the first spring loaded plunger, the first actuator lever configured to translate the first spring loaded plunger at least one of in and out the first actuator opening and the second actuator opening; anda first geometric gripping surface (910) coupled to the first outer tube actuator assembly (975) configured to drive rotation of the first outer tube (152).
- The coaxial actuator assembly of claim 10, wherein the first outer tube (152) rotates coaxially about the axis in response to the first geometric gripping surface (910) driving rotation of the first outer tube.
- The coaxial actuator assembly of claim 11, further comprising an inner shaft actuator assembly coupled to the drive shaft assembly;a second actuator tube disposed within the inner shaft actuator assembly and coupled to the inner shaft, wherein the second actuator tube comprises a first actuator opening and a second actuator opening each disposed in the second actuator tube;a second spring loaded plunger configured to be disposed in the first actuator opening or the second actuator opening; anda second actuator lever coupled to the second plunger, configured to translate the second plunger at least one of in and out the first actuator opening and the second actuator opening; anda second geometric gripping surface (912) coupled to the inner shaft actuator assembly and configured to drive rotation of the inner shaft.
- The coaxial actuator assembly of claim 12, wherein the inner shaft rotates in response to the second geometric gripping surface (912) driving rotation of the inner shaft.
- A restraint assembly actuation system, comprising:a drive shaft assembly (150) comprising a first outer tube (152) and an inner shaft, wherein the first outer tube and the inner shaft are disposed coaxially about an axis;a coaxial actuator assembly comprising:a first outer tube actuator assembly (975) coupled to the drive shaft assembly,a first actuator tube disposed within the first outer tube actuator assembly and coupled to the first outer tube, wherein the first actuator tube comprises a first actuator opening and a second actuator opening each disposed in the first actuator tube,a first spring loaded plunger configured to be disposed in at least one of the first actuator opening or the second actuator opening,a first actuator lever coupled to the first spring loaded plunger, configured to translate the first spring loaded plunger at least one of in and out the first actuator opening and the second actuator opening, anda first geometric gripping surface (910) coupled to the first outer tube actuator assembly (975) and configured to drive rotation of the first outer tube (152);a second outer tube coupled to the inner shaft; anda first restraint assembly actuation system comprising:
a first restraint (102) coupled to the first outer tube (152), wherein the first outer tube is configured to rotate the first restraint about the axis to a raised position to restrain a cargo load. - The restraint assembly actuation system of claim 14, further comprising a second restraint (104) coupled to the second outer tube, and preferably wherein the second outer tube is configured to rotate the second restraint (104) about the axis to the raised position to restrain the cargo load, and more preferably further comprising an inner shaft actuator assembly coupled to the drive shaft assembly;a second actuator tube disposed within the inner shaft actuator assembly and coupled to the inner shaft, wherein the second actuator tube comprises a first actuator opening and a second actuator opening each disposed in the second actuator tube;a second spring loaded plunger configured to be disposed within at least one of the first actuator opening or the second actuator opening; anda second actuator lever coupled to the second plunger, configured to translate the second plunger at least one of in and out the first actuator opening and the second actuator opening; anda second geometric gripping surface (912) coupled to the inner shaft actuator assembly configured to drive rotation of the inner shaft, and more preferably further comprising:a plurality of forward restraints coupled to the first outer tube and configured to be actuated by the first outer tube, anda plurality of aft restraints coupled to the second outer tube and configured to rotate coaxially with the second outer tube.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/528,065 US12252267B2 (en) | 2021-11-16 | 2021-11-16 | Restraint system utilizing co-axial actuation |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP4180328A2 true EP4180328A2 (en) | 2023-05-17 |
| EP4180328A3 EP4180328A3 (en) | 2023-07-19 |
| EP4180328B1 EP4180328B1 (en) | 2025-04-09 |
Family
ID=84330993
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22206500.5A Active EP4180328B1 (en) | 2021-11-16 | 2022-11-09 | Restraint system utilizing co-axial actuation |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US12252267B2 (en) |
| EP (1) | EP4180328B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20250026477A1 (en) * | 2023-07-21 | 2025-01-23 | Goodrich Corporation | Compact vertically actuated anti-rollout restraint for use in internal cargo restraint system |
Family Cites Families (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3377040A (en) | 1966-12-05 | 1968-04-09 | Boeing Co | Retractable cargo securing device |
| US3693919A (en) | 1971-05-06 | 1972-09-26 | Boeing Co | Cargo handling system automatic center |
| US3759476A (en) | 1972-02-18 | 1973-09-18 | Mc Donnell Douglas Corp | Latching system |
| DE2432245B2 (en) | 1974-07-05 | 1976-07-01 | Messerschmitt-Bölkow-Blohm GmbH, 8000 München | ROLLABLE DEVICE FOR LOCKING CARRIERS |
| US4049286A (en) | 1976-01-12 | 1977-09-20 | Saginaw Products Corporation | Latch assembly for containerized baggage trailer |
| US4077590A (en) | 1976-03-11 | 1978-03-07 | The Boeing Company | Integrated treadway cargo handling system |
| US4331412A (en) | 1979-11-23 | 1982-05-25 | Brooks & Perkins, Incorporated | Retractable pallet securing device |
| AU6712381A (en) | 1980-02-13 | 1981-08-20 | Visser, K. | Device for loading goods |
| US4349302A (en) | 1980-07-07 | 1982-09-14 | Lockheed Corporation | Pallet latching mechanism |
| US4395172A (en) | 1980-12-12 | 1983-07-26 | The Boeing Company | Cargo restraint system with spring fuse |
| DE3107745C2 (en) | 1981-02-28 | 1987-03-19 | Messerschmitt-Bölkow-Blohm GmbH, 8012 Ottobrunn | Locking element for locking cargo items |
| US4375932A (en) | 1981-05-07 | 1983-03-08 | The Boeing Company | Powered cargo restraint |
| US4461437A (en) | 1981-07-16 | 1984-07-24 | Brooks & Perkins, Inc. | Tension release |
| US4867622A (en) | 1988-07-21 | 1989-09-19 | Bethlehem Steel Corporation | Lateral restraining device for cargo containers having more than one width |
| US5000635A (en) | 1989-11-17 | 1991-03-19 | The Boeing Company | Spring-loaded outboard side lock |
| US5131606A (en) | 1991-04-01 | 1992-07-21 | Arnold Nordstrom | Seat pallet and cargo pallet restraining system |
| DE4210702C2 (en) | 1992-04-01 | 1995-09-21 | Daimler Benz Aerospace Airbus | Device for guiding |
| DE59807512D1 (en) | 1997-05-28 | 2003-04-24 | Telair Int Gmbh | Installation device for a roller drive unit |
| US6193453B1 (en) | 1997-07-24 | 2001-02-27 | Willem J. A. Kernkamp | Cargo lock for fixing cargo pallets to seat tracks in aircraft |
| US5957406A (en) | 1997-12-03 | 1999-09-28 | The Boeing Company | Bi-directional cargo restraint |
| DE19816892C2 (en) | 1998-04-16 | 2000-05-18 | Telair Int Gmbh | bars |
| US6425717B1 (en) | 2000-11-08 | 2002-07-30 | The Boeing Company | Cargo restraint device |
| US6485238B2 (en) | 2001-03-16 | 2002-11-26 | Pemco Aviation Group | Restraint apparatus |
| US6557800B2 (en) | 2001-09-26 | 2003-05-06 | The Boeing Company | Cargo handling system for aircraft compartments |
| DE10205871B4 (en) | 2002-02-13 | 2006-05-04 | Telair International Gmbh | Mounting device for a functional element |
| DE10258439B4 (en) | 2002-12-13 | 2007-04-05 | Pfw Aerospace Ag | Locking device for cargo loading systems |
| US6729818B1 (en) | 2003-01-14 | 2004-05-04 | The Boeing Company | Supplemental cargo restraint system for oversized cargo |
| US20040265085A1 (en) | 2003-06-27 | 2004-12-30 | Mayer Henry P. | Cargo restraint device |
| DE102004039666B4 (en) | 2004-08-16 | 2008-09-04 | Airbus Deutschland Gmbh | Device for locking objects |
| US7086517B2 (en) | 2004-10-29 | 2006-08-08 | The Boeing Company | Cargo system roller/lock/power drive unit tray integration |
| DE102005017425B4 (en) | 2005-04-15 | 2010-08-19 | Airbus Deutschland Gmbh | Loading aids for cargo holds in aircraft |
| US7429157B2 (en) | 2005-10-13 | 2008-09-30 | Goodrich Corporation | Overrideable guide and vertical restraint for an air cargo system |
| US7435043B2 (en) | 2005-10-14 | 2008-10-14 | Goodrich Corporation | Air cargo vertical restraint assembly |
| US7665938B2 (en) | 2006-03-30 | 2010-02-23 | Goodrich Corporation | Coaxially mounted retracting guide and restraint for an air cargo system |
| US7713009B2 (en) | 2006-03-31 | 2010-05-11 | The Boeing Company | Apparatus and methods for removably securing payloads in an aircraft |
| US7731460B2 (en) | 2006-10-30 | 2010-06-08 | Goodrich Corporation | Self-adjusting ULD loading guide and restraint |
| FR2916422B1 (en) | 2007-05-25 | 2016-09-30 | Goodrich Corp | METHOD FOR MODIFYING THE CARGO AIRBAR FOR RECEIVING STANDARD PALLETS OF DIFFERENT LENGTHS, KIT OF IMPLEMENTATION AND PLANE SO EQUIPPED |
| US20080310944A1 (en) | 2007-06-14 | 2008-12-18 | Goodrich Corporation | Power drive unit with eccentric roller lift system |
| US7854579B2 (en) | 2007-07-13 | 2010-12-21 | Goodrich Corporation | Air cargo rollout stop |
| US7530774B2 (en) | 2007-07-13 | 2009-05-12 | Goodrich Corporation | Air cargo rollout stop |
| WO2009061347A1 (en) | 2007-10-17 | 2009-05-14 | Woodland Richard L K | Aircraft based non-dedicated special mission pod mounting apparatus |
| US8038373B2 (en) | 2008-12-05 | 2011-10-18 | Drs Training & Control Systems, Llc | Folding pallet latch with integral rollout prevention |
| US7988391B2 (en) | 2009-02-17 | 2011-08-02 | Goodrich Corporation | Self-locking, overrideable and attenuating cargo guide and restraint |
| DE102009012427B4 (en) | 2009-03-10 | 2015-08-27 | Telair International Gmbh | roller conveyor |
| DE102010036983B4 (en) | 2010-08-13 | 2012-05-03 | Telair International Gmbh | Side guide, side guide group, cargo deck |
| DE102010035099A1 (en) | 2010-08-23 | 2012-02-23 | Airbus Operations Gmbh | Fully automatic freight loading system |
| US8585334B2 (en) | 2012-04-03 | 2013-11-19 | Ancra International Llc | Attenuating cargo restraint device |
| US9079665B2 (en) | 2012-06-18 | 2015-07-14 | Goodrich Corporation | Sequential latch for palletized cargo |
| DE102012213104A1 (en) | 2012-07-25 | 2014-01-30 | Jost-Werke Gmbh | CONTAINER LOCK |
| US8936419B1 (en) | 2013-08-15 | 2015-01-20 | Aar Corp. | Restraint system for restraining a unit load device in an aircraft |
| US20160001870A1 (en) | 2014-07-07 | 2016-01-07 | Ancra International Llc | Method for loading cargo into an aircraft |
| US20160194082A1 (en) | 2015-01-05 | 2016-07-07 | Goodrich Corporation | Conformal manually operated aircraft cargo restraint mechanism with integrated tie off |
| BR102016000552B1 (en) | 2016-01-11 | 2022-12-27 | Embraer S.A | LONGITUDINAL LOCKING DEVICE FOR LOADING IN AIRCRAFT |
| US10017251B2 (en) | 2016-06-06 | 2018-07-10 | Ancra International, Llc | Cargo restraint for aircraft |
| US10118700B2 (en) | 2016-10-12 | 2018-11-06 | Goodrich Corporation | SMA actuated restraint assembly |
| ES2788133T3 (en) | 2016-11-24 | 2020-10-20 | Airbus Defence & Space Sau | Anti-rattle device for pallets in cargo aircraft |
| US9932113B1 (en) | 2016-12-02 | 2018-04-03 | Goodrich Corporation | Restraint assembly for cargo system |
| US10450066B2 (en) | 2017-02-09 | 2019-10-22 | Goodrich Corporation | Lock assembly with rotating inner pawl |
| US10392111B2 (en) | 2017-03-23 | 2019-08-27 | Goodrich Corporation | Semi-automated lock assembly |
| US10577106B2 (en) | 2017-08-31 | 2020-03-03 | The Boeing Company | System and method for restraining cargo |
| US10562627B2 (en) | 2018-01-09 | 2020-02-18 | Goodrich Corporation | Tray mounted longitudinal guide with conveyance in the lowered position and vertical restraint in the raised position |
| US11072425B2 (en) | 2018-06-14 | 2021-07-27 | Goodrich Corporation | Synchronous locking pin assembly |
| US11383837B2 (en) | 2020-01-09 | 2022-07-12 | Goodrich Corporation | Under floor stored pallet sequential/independent locking system |
-
2021
- 2021-11-16 US US17/528,065 patent/US12252267B2/en active Active
-
2022
- 2022-11-09 EP EP22206500.5A patent/EP4180328B1/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20250026477A1 (en) * | 2023-07-21 | 2025-01-23 | Goodrich Corporation | Compact vertically actuated anti-rollout restraint for use in internal cargo restraint system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230150670A1 (en) | 2023-05-18 |
| EP4180328B1 (en) | 2025-04-09 |
| EP4180328A3 (en) | 2023-07-19 |
| US12252267B2 (en) | 2025-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20070108343A1 (en) | Flight control surface actuator assembly including a free trail mechanism | |
| US8042417B2 (en) | Actuator | |
| EP2130765B1 (en) | Aircraft landing gear unlock actuator | |
| EP2107273B1 (en) | Actuator | |
| EP3281873B1 (en) | Brake release for aircraft seat | |
| US9205923B1 (en) | Manual override cargo unloading system for air cushion supported aircraft cargo loading robot | |
| EP4180328B1 (en) | Restraint system utilizing co-axial actuation | |
| US12371195B2 (en) | Vehicle capture assemblies and related devices, systems, and methods | |
| EP3231707B1 (en) | Lateral brake assembly for a seat locking mechanism | |
| EP1793477B1 (en) | Fault-tolerant electro-mechanical actuator having a torque sensing control system | |
| EP3231659B1 (en) | Electric motor assembly for a seat locking mechanism | |
| EP3231709B1 (en) | Carriage assembly for a seat locking mechanism | |
| EP3418182B1 (en) | Wing fold system with latch pins through multiple mating lugs | |
| US20180334250A1 (en) | Electromechanical actuator disconnect | |
| WO2006085986A1 (en) | In-flight refueling system, boom, and method for extending range of motion of an in-flight refueling boom | |
| EP3778302B1 (en) | Stowable cargo guide for cargo roller trays | |
| EP3786481B1 (en) | Adjustable tie rod and related method | |
| US5244406A (en) | Spline screw payload fastening system | |
| EP4134307A1 (en) | Cargo restraint system with individually retractable restraints | |
| EP3231708B1 (en) | Rotational brake assembly for a seat locking mechanism | |
| US11952113B1 (en) | Wing lock and deployment mechanism | |
| EP3584163B1 (en) | Retractable cargo deck entrance guide assemblies for palletized loads in cargo aircraft | |
| EP3231660B1 (en) | Low profile constant force linearly actuated brake assembly for aircraft seating | |
| US12017794B2 (en) | Systems and methods for restraining cargo on aircraft loading systems using indexing mechanisms | |
| US12503220B2 (en) | Gear disconnect mechanism for landing gear actuator emergency deployment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B60P 7/13 20060101ALI20230615BHEP Ipc: B64D 9/00 20060101AFI20230615BHEP |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230922 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240116 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20241106 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602022012850 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1783343 Country of ref document: AT Kind code of ref document: T Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250811 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250710 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250709 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250709 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250809 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20251022 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602022012850 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20251023 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250409 |
|
| 26N | No opposition filed |
Effective date: 20260112 |