EP1504281B1 - Determining an angle to a target using interferometry - Google Patents
Determining an angle to a target using interferometry Download PDFInfo
- Publication number
- EP1504281B1 EP1504281B1 EP03731280.8A EP03731280A EP1504281B1 EP 1504281 B1 EP1504281 B1 EP 1504281B1 EP 03731280 A EP03731280 A EP 03731280A EP 1504281 B1 EP1504281 B1 EP 1504281B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- radar
- phase
- channel
- signal
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
- G01S13/522—Discriminating between fixed and moving objects or between objects moving at different speeds using transmissions of interrupted pulse modulated waves
- G01S13/524—Discriminating between fixed and moving objects or between objects moving at different speeds using transmissions of interrupted pulse modulated waves based upon the phase or frequency shift resulting from movement of objects, with reference to the transmitted signals, e.g. coherent MTi
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/28—Details of pulse systems
- G01S7/285—Receivers
- G01S7/292—Extracting wanted echo-signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/18—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein range gates are used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/20—Systems for measuring distance only using transmission of interrupted, pulse modulated waves whereby multiple time-around echoes are used or eliminated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/26—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave
- G01S13/28—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave with time compression of received pulses
- G01S13/284—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave with time compression of received pulses using coded pulses
- G01S13/288—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave with time compression of received pulses using coded pulses phase modulated
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/66—Radar-tracking systems; Analogous systems
- G01S13/70—Radar-tracking systems; Analogous systems for range tracking only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/882—Radar or analogous systems specially adapted for specific applications for altimeters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/933—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of aircraft or spacecraft
- G01S13/935—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of aircraft or spacecraft for terrain-avoidance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/14—Systems for determining direction or deviation from predetermined direction
- G01S3/46—Systems for determining direction or deviation from predetermined direction using antennas spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems
- G01S3/48—Systems for determining direction or deviation from predetermined direction using antennas spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems the waves arriving at the antennas being continuous or intermittent and the phase difference of signals derived therefrom being measured
Definitions
- This invention relates generally to radar systems, and more specifically to a radar system which is capable of synchronization with a digital elevation map (DEM) to accurately determine a location.
- DEM digital elevation map
- Pulse radar altimeters demonstrate superior altitude accuracy due to their inherent leading edge return signal tracking capability.
- the pulse radar altimeter transmits a pulse of radio frequency (RF) energy, and a return echo is received and tracked using a tracking system.
- RF radio frequency
- the interval of time between signal bursts of a radar system is called the pulse repetition interval (PRI).
- the frequency of bursts is called the pulse repetition frequency (PRF) and is the reciprocal of PRI.
- Figure 1 shows an aircraft 2 with the Doppler effect illustrated by isodops as a result of selection by the use of Doppler filters.
- the area between the isodops of the Doppler configuration will be referred to as swaths.
- the Doppler filter, and resulting isodops are well known in this area of technology and will not be explained in any further detail.
- the aircraft 2 in the specification will be assumed to have a vertical velocity of zero. As is known, if a vertical velocity exists, the median 8 of the Doppler effect will shift depending on the vertical velocity. If the aircraft 2 has a vertical velocity in a downward direction, the median of the Doppler would shift to the right of the figure.
- the Doppler would shift to the left of the figure. Again, it will be assumed in the entirety of the specification that the vertical velocity is zero for the ease of description. However, it is known that a vertical velocity almost always exists.
- Radar illuminates a ground patch bounded by the antenna beam 10 from an aircraft 2.
- Figure la shows a top view of the beam 10 along with the Doppler effect and
- Figure 1b shows the transmission of the beam 10 from a side view.
- range gates are used to further partition the swath created by the Doppler filter.
- many radar range gates operate in parallel. With the range to each partitioned area determined, a record is generated representing the contour of the terrain below the flight path.
- the electronic maps are used with the contour recording to determine the aircraft's position on the electronic map. This system is extremely complex with all the components involved as well as the number of multiple range gates that are required to cover a terrain area. As a result, the computations required for this system are very extensive.
- US6362776 discloses a radar altimeter for determining altitude of an air vehicle, comprising a transmitter for transmitting radar signals toward the ground.
- a first and a second antenna receive reflected radar signals, and a signal processor coupled to the first and the second antennas includes a filter for rejecting signals other than signals reflected from a selected ground swath.
- the signal processor determines the above ground level altitude of the air vehicle based on the radar signals output from the filter means.
- a phase ambiguity resolution means resolves phase ambiguities that arise due to multiple wavelength separation of the first and the second antenna.
- the phase ambiguity resolution means may comprise a third antenna spaced closely to the first antenna such that there are no phase ambiguities between the reflected radar signals received by the third antenna and the first antenna.
- US4136342 discloses techniques in which angular ambiguity in measurements made in radio interferometers is resolved by comparing an ambiguous value for a desired angle with an unambiguous value for an angle which is ideally equal to the desired angle but which may differ from it by an error angle less than ⁇ .
- ambiguity in the phase difference between a pair of widely-spaced antennas may be resolved by reference to the sum of two unambiguous phase differences between each of those antennas and an intermediate antenna.
- US4277788A discloses an antenna array for directional determination, comprising two pairs of elongated end-firing log-periodic antenna elements, each pair fixed symmetrically to a reference plane and preferably forwardly convergent to it.
- the present invention provides a radar signal processing circuit according to claim 1 of the appended claims.
- Doppler radar/interferometer to navigate an aircraft 2 with respect to terrain features below aircraft 2.
- aircraft is used to identify all flight platforms which may incorporate a radar system, including, but not limited to, jets, airplanes, unmanned aerial vehicles, missiles, and guided weapons.
- the radar also functions with an electronic map, sometimes referred to herein as a digital elevation map (DEM), in determining a position of aircraft 2.
- DEM digital elevation map
- an XYZ location of the nearest object to aircraft 2 on the ground, with respect to aircraft 2 in a certain terrain area can be determined.
- a Doppler filter and range gate are used with a transmitted beam 10 from a transmit antenna.
- range is measured and indicated by measuring the time for transmitted energy to be reflected from the surface and returned.
- a radar transmitter repeatedly sends out bursts of electromagnetic energy at a predetermined repetition rate from an antenna, as indicated by transmit pulse 20.
- a ground return pulse 22 is received by a receiving antenna feeding a receiver.
- a range gate 30 is utilized by the tracking radar to view at least a portion of ground return 22.
- three receive antennas antenna R (right) 42, Antenna L (left) 44, and an ambiguous antenna (Ant Amb) 46, are used to receive information.
- three processing channels referred to below as left, right and ambiguous respectively, each include a receiver, a data acquisition device, range gate, and a filter.
- Use of the three antenna system, along with the processing described herein, provides a solution to ambiguous detected angle of the nearest object.
- the ambiguous detected angle is due to the spacing of the antennas being greater than the transmitted RF frequency wavelength.
- the processing system is able to determine an umambiguous location of the nearest object on the ground, which in turn is utilized to locate position of aircraft 2 in body coordinates.
- Body coordinates are typically preferable than positioning as determined by known systems, as those systems determine position as if the body aircraft 2 is aligned with the line of flight. As aircraft 2 is prone to pitch, roll, and yaw, the body of aircraft 2 is not necessarily aligned with the line of flight.
- antenna R 42 along with processing systems (described below) will provide a course range search which roughly determines the range to the nearest point 48 in swath 12 (shown in Figure 1 ) before aircraft 2 has passed over from swath 14 into swath 12. Determination of the nearest point 48 is performed by a wide bandwidth, high speed track loop which quickly determines the range to nearest point 48 in swath area 12. Nearest point 48 provides a starting point for a tracking loop using antenna L 44 and ambiguous antenna 46. The track loop controls the range gate to track returns from a transmit antenna. A narrow bandwidth, high precision processor is used to set range gates for antenna L 44 and ambiguous antenna 46 to an exact range of nearest point 48 based on the previous course range determination.
- the operation of the three receive antennas and associated processing channels provides a quick and accurate setting of a range gate on the nearest object in the Doppler swath 14 directly below aircraft 2 so that a phase difference can be measured and along with the known separations 50 amongst the three antennas, a crosstrack distance to the object 48 is determined.
- the crosstrack distance is the distance, horizontal and perpendicular to the body coordinates of aircraft 2, to object 48.
- Figure 3 shows a view with aircraft 2 going into the Figure.
- the Doppler filters of the left, right and ambiguous channels are set to select a swath 14 (shown in Figure 1 ) below aircraft 2.
- both range gates are set at a range directly on the nearest object 48 as previously determined. From this range, antenna R 42 receives a signal from object 48 at a distance of R1, ambiguous antenna 46 receives a signal from the object 48 at a distance of RA, and antenna L 44 receives the signal from object 48 at a distance of R2 where the distance difference is a function of the antenna separation 50 between and amongst the three antennas.
- a phase processor compares the phase difference between R1 and RA, R2 and RA, and R1 and R2 once the return signals are received.
- the exact range differences (R2-R1), (RA-R1), and (R2-RA) are from phase differences and simple trigonometry relations are used to determine the exact crosstrack distance to the object 48 in aircraft body coordinates.
- the crosstrack distance (Y) and vertical distance (Z) can also be computed in aircraft body coordinates. It is important that the precise location of nearest object 48 in each swath is determined so correlation can be made with the electronic maps which will accurately locate the aircraft 2 on the electronic map. For example, at typical high speed aircraft cruising velocities, a radar, configured with reasonably sized Doppler filters, has swath widths of approximately 3 metres at 1524 metres altitude. The resulting incidence angle formed by the intersection of R1 and a vertical line 27 will then be on the order of less than 3 degrees.
- Figure 4 illustrates a body coordinate 'system.
- the body coordinate system is the coordinate system with respect to aircraft body 2.
- An x-axis, Xm is an axis which passes through a nose of aircraft body 2.
- a y-axis, Ym is an axis which is 90 degrees from Xm and is positive to the right of aircraft body 2.
- a z-axis, Zm is an axis which is 90 degrees from both Xm and Ym and perpendicular to a bottom of aircraft body 2.
- a positive roll is a drop of the right wing
- a positive pitch is a nose up
- a positive yaw is the nose to the right, all with respect to a line of flight.
- the body coordinate system aligns with the doppler coordinate system.
- Xm and Xd are still aligned, while Yd rotates below Ym and Zd rotates to the left of Zm.
- Yd rotates below Ym
- Zd rotates to the left of Zm.
- Xd rotates to the right of Xm
- Yd rotates behind Ym
- Zd and Zm are aligned.
- Xd rotates above Xm
- Yd aligns with Ym
- Zd rotates ahead of Zm.
- FIG. 6 is one embodiment of a doppler radar processing system 200.
- System 200 incorporates three radar antennas which receive reflected radar pulses, the pulses having originated from a radar source.
- a left antenna 202 receives the pulses and forwards the electrical signal to receiver 204.
- Receiver 204 forwards the received radar signal to a data acquisition unit 206.
- a right antenna 208 receives the pulses, at a slightly different time than left antenna 202, and forwards the electrical signal to receiver 210.
- Receiver 210 forwards the received radar signal to a data acquisition unit 212.
- An ambiguity antenna 214 also receives the reflected radar signal, and passes the received signal to a circulator 216.
- Circulator 216 functions to direct the transmit signal to the antenna, and to direct the received signal from the antenna to receiver 220, thereby allowing a single antenna to be used for both transmitting and receiving.
- Receiver 220 forwards the received signal to a data acquisition unit 222.
- Data acquisition unit 206 provides a digital signal representative of the signal received at left antenna 202 to a left phase pre-processing unit 224. Similarly, representative signals are received at pre-processing units 226 and 228 from data acquisition units 222 and 212, respectively. Data acquisition units 206, 212, and 222 are configured, in one embodiment, to sample received signals, and thereby reduce the data to a rate which allows a relatively low speed computer to process digitized radar data. In one embodiment, pre-processing units 224, 226, and 228 perform a gate ranging function.
- a phase processor 230 receives gated, filtered signals, representative of left, right, and ambiguity signals received at the antennas, and determines a phase relationship between each of the left and ambiguous signal, the right and ambiguous signals, and the right and left signals. The phase relationships between the signals are used, along with slant range, velocity and attitude readings in a phase ambiguity processing unit 232 to determine an interferometric angle to a target.
- a body coordinate processor 233 utilizes the interferometric angle to determine an XYZ position of, for example, an aircraft employing system 200 with respect to a current aircraft position, sometimes referred to herein as aircraft body coordinates.
- a signal from data acquisition unit 222 is also received at an automatic gain control (AGC) unit 234.
- a signal from AGC unit 234 is passed to pre-processing units 236, 238, and 240.
- a filtered signal from pre-processing unit 236 is passed to range track processor 242 which provides a slant range signal to phase ambiguity processing unit 232 and altitude information.
- Pre-processing unit 238 passes a filtered signal to a range verification processor 244.
- Pre-processing unit 240 passes a filtered signal to a range level processor 246, which also provides a feedback signal to AGC 234.
- FIG. 7 is a block diagram of a digital processing section 300 for system 200 (shown in Figure 6 ).
- Section 300 includes pre-processing units 224, 226, 228, 236, 238, and 240 and processors 230, 242, 244, and 246.
- pre-processing units 224, 226, 228, 236, 238, and 240 each includes a gate correlator 302, a correlation band pass filter 304, a baseband I/Q mixer 306, and a swath band pass filter 308.
- a filter coefficients processor 309 in one embodiment, is configured to provide at least a filter center frequency in hertz, Fc, a filter bandwidth in hertz, B, and a filter sampling frequency in hertz, Fs, to swath band pass filter 308, which uses Fc, B, and Fs in determination of filter coefficients.
- processor 309 receives as input, an antenna mounting angle, velocity vectors in body coordinates, a pitch, and a slant range.
- FIG 8 is a block diagram of a correlation band pass filter 304 (also shown in Figure 7 ).
- An input signal 310 sometimes referred to as x(0)
- An output of summing element 312 is multiplied by a coefficient 313, which, in one embodiment has a value of 1/K1 (further described below).
- an output signal 314, sometimes referred to as y(0) is generated.
- Another input into summing element 312 is provided by input signal 310 being delayed by a two sample delay element 316, whose output, sometimes referred to as x(-2), is fed into summing element 312.
- output signal 314 is fed back into a second two sample delay element 318, whose output, sometimes referred to as y(-2), is multiplied by a second coefficient 319, and fed into summing element 312.
- filter 304 is configured to filter range ambiguity spectrum lines, filter out-of-band interference signals and stretch the input signal, which is a pulse, to a continuous wave (CW) signal.
- Filter 304 receives as input an output of gate/correlator 302 (shown in Figure 7 ) at a sample rate of 100 MHz, an IF frequency of 25MHz, and has a bandwidth of 10KHz. Therefore, in this embodiment, there are four samples per IF frequency period.
- a sample clock at 100 MHz provides samples at a 10 nsec rate.
- N 400 clocks per PRI
- the zero amplitude samples which do not affect filter output are not processed by filter 304. Therefore, past outputs, for example y(-2), required in the filter feedback configuration, as illustrated by delay elements 316 and 318, at the time of non-zero inputs are not available. These past outputs are calculated based on filter outputs generated during and directly after the previous return (the previous non-zero samples), and filter droop characteristics over a known pulse repetition interval.
- one of the past outputs, y(-1), is not used because it has a feedback multiplier with a value of nearly zero in one embodiment of filter 304, because of the narrow 10 kHz bandwidth.
- Table 1 illustrates a general procedure for operation of filter 304, for low altitude radar data, track and phase gate of two sample widths, and a PRI of 400 ⁇ sec.
- the calculation for filter output y(0) requires filter output y(-2).
- y(399) becomes y(0) if a range gate is moved in an inbound direction.
- the resulting P becomes 399. If a range gate is moved in an outbound direction, y(1) becomes y(0), and the resulting P becomes 401.
- Algorithms shown for determination of y(4) through y(11) are used to formulate a general algorithm equation.
- the filter algorithm is calculated because new x(N) and/or y(N) data are available.
- y(398) and y(399) are calculated, and the filter algorithm is configured to wait for x(400) data, where x(400) is equivalent to x(0). If a range tracking algorithm dictates that x(0) be x(399), that is, the range gate causes the PRI to be shortened, then y(397) and y(398) are calculated. If the range tracking algorithm dictates that x(0) be x(401), that is, the range gate causes the PRI to be increased, then x(399) and x(400) are calculated.
- the signal phase is preserved by using the correct x(0) and y(-2).
- the PRI is not limited to 4 ⁇ sec and can have a wide range of values.
- the filter algorithm is configured to set the N counter to count to 400 on the next cycle unless the range tracking algorithm requires 399 or 401 counts.
- a filter configured similarly to filter 304 is capable of removing up to about 95% of the mathematical operations that are required in known filter processing schemes.
- filter 304 for high altitude operation, incorporates a Barker code.
- a 13 bit Barker code is used, and inputs x(0) and x(1) are data, x(2) and x(3) are filled with zeros, x(4) and x(5) are data, x(6) and x(7) are filled with zeros, and the pattern continues until N is equal to 51.
- FIG. 9 is a block diagram of a baseband IQ mixer 306.
- Mixer 306 is configured to reject negative Doppler shifts on the IF (Intermediate Frequency) input signal, which are behind aircraft 2, while allowing a positive doppler shift signal, from ahead of aircraft 2 to pass through.
- the positive doppler shift signal is equally forward as the negative doppler shift signal is behind.
- an IF in-phase portion includes a mixer 322 configured to operate at a frequency which is 1/PRI, where PRI is a radar pulse repetition interval, which converts the in-phase IF signal to Baseband (Doppler) frequency.
- Also included in the in-phase portion are a low pass filter 324, a decimator 326, and an all pass filter 328.
- an IF quadrature portion includes a delay element 330, which produces the IF quadrature signal, and a mixer 332 configured to operate at a frequency which is 1/PRI, where PRI is a radar pulse repetition interval, which converts the quadrature IF signal to Baseband (Doppler) frequency. Also included in the quadrature portion are a low pass filter 334, a decimator 336, and an all pass filter 338. All pass filters 328 and 338 are configured to produce Baseband (Doppler) quadrature signals, which are received at a difference element 340, where the output of the all-pass filter 338 is subtracted from the output of the all-pass filter 328. The resulting difference signal contains the positive or forward-looking Baseband (Doppler) signal, which is received at swath bandpass filter 308.
- Doppler Baseband
- a frequency of data received at mixer 306 is 25 MHz, and is referred to as an IF (intermediate frequency) signal.
- Mixer 306 in one embodiment, is configured to convert the 25 MHz IF signal to baseband (or Doppler) frequencies, and further configured to reject negative Doppler frequencies.
- mixers 322 and 332 are configured with PRIs which allow decimation of the signal from correlation bandpass filter 304 to a 25 kHz sample rate.
- the allowed PRIs include 200, 400, 500, 800, and 1000.
- a current input to low pass filter 324 is given as x1(0).
- a current input to low pass filter 334 is given as x0(0).
- K1 is 1 + (1 / tan( ⁇ fo/Fs2)
- K2 is 1 - (1 / tan( ⁇ fo/Fs2)
- fo bandwidth
- Fs2 is a sampling frequency of low pass filters 324 and 334.
- the sampling frequency of low pass filters 324 and 334 is the received signal frequency, Fs1, of 100 MHz divided by the pulse repetition interval.
- decimators 326 and 336 are configured to sample at a frequency which is the pulse repetition interval multiplied by a sampling frequency, Fs3, of all pass filters 328 and 338, divided by the received signal frequency, or (PRI x Fs3) / Fsl.
- FIG. 10 is a block diagram 350 of Baseband (Doppler) in-phase all-pass filter 328 and Baseband (Doppler) quadrature all-pass filter 338.
- all-pass filter 328 and all-pass filter 338 include four cascaded second-order infinite impulse response (IIR) filters, configured to generate Baseband (Doppler) quadrature signals.
- IIR infinite impulse response
- all-pass filter 328 it includes filter elements 352, 354, 356, and 358, sometimes referred to herein as a, b, c, and d respectively.
- filter elements 362, 364, 366, and 368 sometimes referred to herein as e, f, g, and h respectively.
- FIG 11 is a block diagram of one embodiment of a filter element 380.
- Element 380 is a representation of all of filter elements 352, 354, 356, 358, 362, 364, 366, and 368 (shown in Figure 9 ).
- the following description refers specifically to element 380, consisting of delay elements 392, 396, 400, 404, summing element 386, and gain elements 384, 394, 398, 388, 402, 406.
- the current input 382 is referred to as x(0).
- A0, A1, A2, B1, and B2 refer to the gain block coefficients.
- the above equation is applicable for all of filter elements 352, 354, 356, 358, 362, 364, 366, and 368 (shown in Figure 9 ).
- the following are the coefficients for each filter element, the elements 352, 354, 356, 358, 362, 364, 366, and 368 being represented by a, b, c, d, e, f, g, and h respectively, and BBfreq is the base band sampling frequency, and T is 1/BBfreq.
- floating point precision is used.
- FIG 12 is a block diagram of one embodiment of a swath band pass filter 308.
- Filter 308 is a first order band pass filter which is centered on the doppler frequency.
- Filter 308 receives as input a signal, En, output from IQ mixer 306 (shown in Figure 9 ). Further inputs include a filter center frequency in hertz, Fc, a filter bandwidth in hertz, B, and a filter sampling frequency in hertz, Fs, which are provided.
- the input signal, En 422 is received and multiplied by a coefficient 424, with a value of A0/B0, and then applied to a summing element 426.
- the output of summing element 426 is filter output 428.
- Input 422 is also delayed two counts by a two sample delay element 430 whose output is multiplied by coefficient 432, with a value of -A0/B0, and then applied to summing element 432.
- Output 428 is multiplied by a sample delay element 434, whose output is multiplied by a coefficient 436, with a value of -B1B0, and then applied to summing element 432.
- Output 428 is also multiplied by a two sample delay element 438, whose output is multiplied by a coefficient 444, with a value of -B2/B0, and then applied to summing element 432.
- the coefficient A0 is 2 x Fs x Wb
- B0 (4 x Fs 2 ) + (2 x Fs x Wb) + (W1 ⁇ Wu)
- B1 is (2 x W1 x Wu) - (8 ⁇ Fs 2 )
- B2 (4 ⁇ Fs 2 ) - (2 x Fs x Wb) + (W1 x Wu).
- FIG 13 is a block diagram of a filter coefficients processor 309 (also shown in Figure 7 ) which, in one embodiment, is configured to provide inputs to swath band pass filters 308 (shown in Figures 7 and 12 ).
- Processor 309 is configured to provide center frequencies Fc, for range swaths and phase swaths, and filter bandwidths, B, in hertz, for track and phase swaths and level and verify swaths.
- Fc center frequencies
- B filter bandwidths
- processor 309 is able to keep the doppler swath centered in the antenna beam. Also filter bandwidth is controlled.
- the filter bandwidth is directly related to a down track swath width on the ground such that a charge time for filter 308, inversely but directly related to bandwidth, is equal to the time it takes aircraft 2 to fly across the swath width. Therefore, filter bandwidth is matched to velocity of aircraft 2, and requires minimal processing.
- a velocity component on body y axis, Vy is not used to center swath in antenna beam as the component has a value of zero since the antenna is fixed to a y axis of the body.
- Processor 309 is also configured to determine a phase swath doppler velocity, Vp 464, which is delayed behind the range swath by a time equal to the range processing delay.
- Phase swath center frequency 466 is
- a level and verify swath bandwidth 470 is calculated as a ratio of level and verify bandwidths to track and phase bandwidths, K, multiplied by track and phase swath bandwidth 468.
- Figure 14 is a vector diagram 500 which illustrates the calculations above described. In one embodiment, if the radar is in a range search mode, search range instead of altitude is used to calculate bandwidth.
- filters 308 and processor 309 automatically configure the radar doppler filter center frequency and bandwidth to achieve better radar performance over varying terrain and varying aircraft altitude, roll, and pitch than known systems.
- the determined center frequency operates to maintain the radar swath at an approximate center of the antenna beam.
- the calculated bandwidth is a bandwidth that controls the track swath width on the ground, and is calculated such that the filter time constant is equal to the time it takes the vehicle to move a corresponding swath width distance.
- the bandwidth corresponds to a time over the target and provides information as to how long a second swath lags a first swath.
- Phase channel swaths are set behind in position to account for a processing time of range processor 242 (shown in Figure 7 ).
- the calculations of center frequency and bandwidth provide a mechanism for keeping a swath slightly in front of the aircraft such that a positive doppler shift is realized.
- Phase processor 230 includes three phase detectors 510, 512, and 514.
- phase detectors 510, 512, and 514 are configured with an input and a reference input, and further configured to determine a phase difference between the input and the reference input.
- Phase processor 230 is configured to receive processed radar return data, from swath band pass filters 308 (shown in Figure 7 ), as described above, for all of a left channel, a right channel, and an ambiguous channel. Determination of phase difference in return data for the three channels allows for an accurate position determination for an object from which radar data was returned.
- phase detector 510 is configured to receive ambiguous channel return data as input, with left channel return data as a reference, and further configured to determine and output a phase difference between the left and ambiguous channels.
- Phase detector 512 is configured to receive right channel return data as input, with ambiguous channel return data as a reference, and further configured to determine and output a phase difference between the ambiguous and right channels.
- Phase detector 514 is configured to receive right channel return data as input, with left channel return data as a reference, and further configured to determine and output a phase difference between the left and right channels.
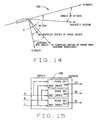
- FIG 16 is a block diagram of phase detector 510 (shown in Figure 15 ).
- Phase detectors 512 and 514 are of the same configuration.
- Phase detector 510 incorporates a plurality of in-phase all pass filters 328 and quadrature all pass filters 338 (shown above in Figures 9 and 10 ).
- an input is received at a first in-phase filter 520 (AP1.1) and a first quadrature filter 522 (AP1.2).
- a reference input is received at a second in-phase filter 524 (AP2.1) and a second quadrature filter 526 (AP2.2).
- a multiplier 532 is configured to multiply outputs from filters 520 and 526.
- Another multiplier 534 is configured to multiply outputs from filters 522 and 524.
- a third multiplier 536 is configured to multiply outputs from filters 520 and 524.
- a fourth multiplier 538 is configured to multiply outputs from filters 522 and 526.
- An output of multiplier 534 is subtracted from an output of multiplier 532 with a subtraction element 540 which produces a Y output 542.
- An output of multiplier 536 is added to an output of multiplier 538 with an addition element 544 which produces an X output 546.
- a processing element 548 is configured to determine an arctangent of Y output 542 divided by X output 546, which is the phase difference, in radians, between the input and the reference input.
- the phase difference is ATAN (Y/X).
- in-phase filters 520 and 524 and quadrature filters 522 and 526 include the four cascaded second order infinite impulse response (HR) filters as described in Figure 10 .
- filters 520 and 524 are configured to include in-phase filter elements 352, 354, 356, and 358, (shown in Figure 10 ) and are configured with coefficients which correspond to elements a, b, c, and d respectively as described above.
- quadrature filters 522 and 526 they are configured to include quadrature filter elements 362, 364, 366, and 368, (shown in Figure 10 ) and are configured with coefficients which correspond to elements e, f, g, and h respectively as described above.
- phase differences between the right, left, and ambiguous channels have been determined, as described above, the phase differences are used, in one embodiment, to determine and interferometric angle to the target.
- Figure 17 is a block diagram of phase ambiguity processing unit 232 (also shown in Figure 6 ).
- phase ambiguity processing unit 232 is configured to receive an electrical phase difference between the ambiguous channel and the left radar channel from phase detector 510, an electrical phase difference between the right channel and the ambiguous radar channel from phase detector 512, and an electrical phase difference between the right channel and the left radar channel from phase detector 514.
- Phase ambiguity processing unit 232 includes a phase bias adjust unit 570 which provides a phase shift value which compensates for phase shifts which occur in the routing of the radar signals, from receipt at an antenna and through cabling and processing areas within aircraft 2. It is accepted that most phase shifting of signals occurs due to cabling for the routing of signals.
- Phase bias adjust 570 compensates for the ambiguous channel with respect to the left radar channel.
- Phase bias adjust 572 compensates for the right channel with respect to the ambiguous radar channel.
- Phase bias adjust 574 compensates for the right channel with respect to the left radar channel.
- phase ambiguity resolver 576 is implemented using software, and determines a physical (interferometric) angle to a target which originally reflected the radar signals received. Phase ambiguity resolution is further described below. After resolution of phase ambiguous signals, the physical angle signal is filtered utilizing a low-pass filter 578, and an angular position of the target with respect to aircraft body coordinates (X,Y,Z) is determined from the physical angle to the target using body coordinates processor 233 (further described below). The determined position, in one embodiment, is 90 degrees minus a half angle of a cone whose axis is a Y-axis of the body of aircraft 2.
- Table 4 is a phase ambiguity resolution matrix which is utilized, in one embodiment, to determine a physical angle to a target based upon electrical phase differences.
- a calculated electrical angle phase difference, ⁇ is equivalent to [(360xS)/ ⁇ ]x sin( ⁇ ) or K x sin( ⁇ ), where ⁇ is the physical angle of the target in aircraft coordinates, S is a separation between the two antenna elements in feet, and ⁇ is a wavelength of the radar signal in feet.
- separation between the left antenna and the ambiguous antenna is 8.891 cm
- separation between the ambiguous antenna and the right antenna is 21.59 cm
- the separation between the left antenna and the right antenna is 30.48 cm.
- the wavelength of the radar is 6.983 cm.
- K1 is (360x8.891)/6.983, or about 458.
- K2 is (360x21.59)/6.983, or about 1113.25
- K2 is (360x30.48)/6.983, or about 1571.64.
- Figure 18 is a chart 600 illustrating varying electrical phase differences between three antenna pairings.
- Chart 600 helps to illustrate the process above described.
- a single mechanical (physical) angle can be determined from the varying electrical phase difference plots for each antenna pairing. That is, for a physical angle, there is one solution which provides a phase difference for each radar channel grouping which is approximately equivalent to the calculated phase differences for the channel groupings.
- Figure 19 is a block diagram which illustrates inputs to and outputs from body coordinate processor 233 (also shown in Figure 6 ).
- Processor receives the phase detector angle to the target from phase ambiguity resolver 576 via low pass filter 578 (described above in Figure 17 ).
- Processor 233 further receives the doppler swath filter center frequency, and the filter bandwidth, a range to the target in feet, and velocity in pitch, roll and azimuth. Utilizing the processing described below, processor 233 is configured to determine a distance to the target in aircraft body coordinates. In one embodiment, the distance is determined in feet for aircraft body coordinates x, y, and z.
- Processor 233 further determines a velocity with respect to aircraft body coordinates in x and z.
- Figure 20 is a detailed block diagram of body coordinate processor 233 of Figure 19 .
- Target range, vehicle velocity in pitch, roll, and azimuth, plus the swath filter center frequency and bandwidth are input into a doppler circle equation processor 620, which is configured to determine doppler circle equations.
- Figure 21 is provided to illustrate the equations with regard to the doppler circle as derived above.
- Inputs to doppler circle equation processor 620 include a range to target of 609.6 metres, a velocity of 244 m/second, a wavelength of 6.983 cm, and a doppler swath filter center frequency of 1213 Hertz.
- processor 233 further includes an interferometric circle equation processor 622 which is configured to determine interferometric circle equations in body coordinates.
- Processor 622 receives as input a target range and the interferometric angle (or phase detector angle), a, to the target as calculated by phase ambiguity resolver 576 (shown in Figure 17 ).
- the radius of the interferometric circle, Ri is 609.6 x cos(15), or 588.9 m.
- the location of the circle on the Ym axis, Ym is 609.6 x sin(15), or 157.9 m.
- Figure 22 is provided to illustrate the equations with regard to the interferometric circle as derived above.
- a doppler to body coordinate transformation processor 624 within processor 233 uses the doppler circle equation, and pitch, roll, and yaw inputs to transform the doppler circle into body coordinates.
- intersection processor 626 which is configured to solve equations to determine an intersection of the interferometric circle equation with the doppler circle equation that has been transformed into body coordinates.
- B is the doppler cone angle
- Fc is the swath filter center frequency
- R is the range to the target
- V is (V x 2 + V y 2 + V z 2 ) 1/2
- L is the wavelength of the radar.
- KA is calculated as (Rxcos(A)) 2
- KB is calculated as (R x sin (B)) 2
- KY (y—Y 1 ) 2
- FIG. 23 illustrates one solution to the problem, the solution being to modulate radar transmit pulses 650 with a phase code.
- Implementation of the code which involves a phase shifting of individual pulses of radar transmit pulses 650, allows a synchronization of transmit pulses 650 with return pulses 652 which are received by a radar. Synchronization of the phase encoded radar pulses with the returned pulses is sometimes referred to as correlation.
- correlation is accomplished by implementation of a encoded radar scheme, and by looking for deviations in the return pulses from a reference, or starting altitude.
- Figure 24 is a block diagram illustrating inputs to and outputs from range verification processor 244 (also shown in Figures 6 and 7 ).
- verification processor 244 is configured to step through encoded return signals and determine a main lobe of the return signal to determine a range to, for example, a target.
- Verification processor 244 is configured to receive as inputs, a detected radar return, which has been gated and demodulated. Verification processor 244 also receives as input a present internal range to the target, and a command from the radar search logic to be in either of a search mode or an acquisition mode. Verification processor 244 is configured with a variable mainlobe threshold factor (described below) and a verification dwell time, which is the time processor 244 is allocated to determine if an amplitude of a return signal exceeds the threshold factor. A verify status output is set true of the amplitude of the radar return exceeds the threshold value, thereby signifying that the transmit radar pulses and return radar pulses are correlated. If not correlated, the verify status output is false, and processor 244 provides a corrected range position to range processor 242 (shown in Figure 7 ).
- a variable mainlobe threshold factor described below
- a verification dwell time which is the time processor 244 is allocated to determine if an amplitude of a return signal exceeds the threshold factor.
- FIG. 25 is a flowchart 670 illustrating one embodiment of an autocorrelation process performed by processor 244.
- a verify gate is set 672 to an internal range, from one of track or search. It is then determined whether a radar return is acquired 674 from within a verify gate, the gate attempting to align the chips of transmitted and received codes. If no target is acquired 674, then processor 244 is configured to return to reset the verify gate. If a target is acquired 674, then an amplitude of the return is determined 676.
- the threshold factor is set to, for example, four times the determined amplitude and a counter is set to zero.
- the verify gate is stepped 678 out one chip of the code, the counter is incremented, and a dwell time passes before an amplitude of a return is again read. If the amplitude read is determined 680 not to be above the threshold factor, the counter is checked 682. If the counter is determined to be less than one less than the number of chips within the barker code, the verify gate is again stepped 678, and the steps are repeated, until the threshold factor is exceeded or the counter is equal to one less than the number of chips within the code. In one exemplary embodiment, a thirteen bit code is used, therefore the counter has a maximum value of twelve. In one embodiment barker codes are used for encoding the radar signals.
- the original acquisition is an acquisition on the main lobe of the return, and the transmit and return codes are aligned, and the internal range as determined by processor 244 is correct, resulting in a verification status being set 684 to verify.
- the transmit and return codes have become aligned. If the internal range has been moved 686 more than two range gates, the process illustrated by flowchart 670 begins anew. If there is a less than two range gate movement 686, the search logic of the radar is set 688 to not verify, and is moved by the value of the counter, in order to align the transmit and receive barker codes. The process illustrated by flowchart 670 again begins.
- the continuous processing of encoded radar transmit and return signals by processor provides a favorable solution to the known radar range ambiguity problem by constantly stepping through the codes to ensure receipt of an unambiguous radar range return.
- the above described verification processing for radar range ambiguity is applied continuously during flight, not just during initial acquisition.
- the verification processing is applied in order to resolve range ambiguity during acquisition, but the processing is continuously applied after acquisition, throughout the flight.
- the continuous processing is done in order to ensure that if the transmit and received pulses become misaligned (loose correlation) the misalignment will both detected and corrected. Loss of correlation could occur due to, for example, a range discontinuity due to severe aircraft rolls or a sudden change in terrain (i.e. flying over a cliff).
- a phase code is used to resolve radar range ambiguities and particularly a 13 bit phase code provides 20xlog(13) or 22dB of rejection to range sidelobes.
- verification processor 244 should, for some reason, line itself on an ambiguous side lobe, even if the mainlobe is for example 22dB higher in amplitude, verification processor 244 will stay aligned with the sidelobe as long as there is a greater than 22dB sensitivity margin.
- one such example is flying over a sharp and deep cliff where a maximum radar track rate is less than a rate at which the range changes over the cliff.
- the method illustrated in flowchart 670 resolves the above illustrated situation by continuously searching for the main lobe, while tracking what is believed to be the correct position, or lobe. If during the ambiguity processing, or verification background search, it is determined that an ambiguous range is being tracked, an immediate correction is made to get the radar onto the correct range (i.e. the main lobe). To detect if the radar is on an ambiguous range track, the 20LogN equation is utilized to continuously determine differences between the main lobe, and undesired side lobes.
Description
- This invention relates generally to radar systems, and more specifically to a radar system which is capable of synchronization with a digital elevation map (DEM) to accurately determine a location.
- The proper navigation of an aircraft in all phases of its flight is based to a large extent upon the ability to determine the terrain and position over which the aircraft is passing. In this regard, instrumentation, such as radar systems, and altimeters in combination with the use of accurate electronic terrain maps, which provide the height of objects on a map, aid in the flight path of the aircraft. Electronic terrain maps are well known and are presently used to assist in the navigation of aircraft.
- Pulse radar altimeters demonstrate superior altitude accuracy due to their inherent leading edge return signal tracking capability. The pulse radar altimeter transmits a pulse of radio frequency (RF) energy, and a return echo is received and tracked using a tracking system. The interval of time between signal bursts of a radar system is called the pulse repetition interval (PRI). The frequency of bursts is called the pulse repetition frequency (PRF) and is the reciprocal of PRI.
-
Figure 1 shows anaircraft 2 with the Doppler effect illustrated by isodops as a result of selection by the use of Doppler filters. The area between the isodops of the Doppler configuration will be referred to as swaths. The Doppler filter, and resulting isodops are well known in this area of technology and will not be explained in any further detail. Further, theaircraft 2 in the specification will be assumed to have a vertical velocity of zero. As is known, if a vertical velocity exists, the median 8 of the Doppler effect will shift depending on the vertical velocity. If theaircraft 2 has a vertical velocity in a downward direction, the median of the Doppler would shift to the right of the figure. If theaircraft 2 has a vertical velocity in an upward direction, the Doppler would shift to the left of the figure. Again, it will be assumed in the entirety of the specification that the vertical velocity is zero for the ease of description. However, it is known that a vertical velocity almost always exists. - Radar illuminates a ground patch bounded by the
antenna beam 10 from anaircraft 2. Figure la shows a top view of thebeam 10 along with the Doppler effect andFigure 1b shows the transmission of thebeam 10 from a side view. To scan a particular area, range gates are used to further partition the swath created by the Doppler filter. To scan a certain Doppler swath, many radar range gates operate in parallel. With the range to each partitioned area determined, a record is generated representing the contour of the terrain below the flight path. The electronic maps are used with the contour recording to determine the aircraft's position on the electronic map. This system is extremely complex with all the components involved as well as the number of multiple range gates that are required to cover a terrain area. As a result, the computations required for this system are very extensive. - In addition to the complexity, the precision and accuracy of the distance to a particular ground area or object has never been attained using an airborne radar processor.
-
US6362776 discloses a radar altimeter for determining altitude of an air vehicle, comprising a transmitter for transmitting radar signals toward the ground. A first and a second antenna receive reflected radar signals, and a signal processor coupled to the first and the second antennas includes a filter for rejecting signals other than signals reflected from a selected ground swath. The signal processor determines the above ground level altitude of the air vehicle based on the radar signals output from the filter means. A phase ambiguity resolution means resolves phase ambiguities that arise due to multiple wavelength separation of the first and the second antenna. The phase ambiguity resolution means may comprise a third antenna spaced closely to the first antenna such that there are no phase ambiguities between the reflected radar signals received by the third antenna and the first antenna. -
US4136342 discloses techniques in which angular ambiguity in measurements made in radio interferometers is resolved by comparing an ambiguous value for a desired angle with an unambiguous value for an angle which is ideally equal to the desired angle but which may differ from it by an error angle less than π. For example, ambiguity in the phase difference between a pair of widely-spaced antennas may be resolved by reference to the sum of two unambiguous phase differences between each of those antennas and an intermediate antenna. -
US4277788A discloses an antenna array for directional determination, comprising two pairs of elongated end-firing log-periodic antenna elements, each pair fixed symmetrically to a reference plane and preferably forwardly convergent to it. - The present invention provides a radar signal processing circuit according to
claim 1 of the appended claims. -
-
Figure 1a is a diagram illustrating swaths made by a radar. -
Figure 1b is a diagram illustrating a radar transmit pattern. -
Figure 2 is an illustration of radar signal waveforms over time. -
Figure 3 is a diagram illustrating radar signals being received by three antennas. -
Figure 4 is a diagram illustrating a body coordinate system. -
Figure 5 is a diagram illustrating a doppler coordinate system with respect to the body coordinate system ofFigure 4 -
Figure 6 is a block diagram of a radar signal processing system. -
Figure 7 is a block diagram of a digital sampling and filtering section. -
Figure 8 is a block diagram of a correlation band pass filter. -
Figure 9 is a block diagram of a in-phase/quadrature mixer. -
Figure 10 is a block diagram of an all pass filter network for in-phase and quadrature components of a signal, within the mixer ofFigure 8 . -
Figure 11 is a diagram of a second order all pass filter. -
Figure 12 is a block diagram of a swath band pass filter. -
Figure 13 is a block diagram of a filter coefficients processor. -
Figure 14 is a velocity vector diagram. -
Figure 15 is a block diagram of a phase processor including three phase detectors. -
Figure 16 is a block diagram of one phase detector fromFigure 15 . -
Figure 17 is a block diagram of an interferometric angle resolver. -
Figure 18 is a chart illustrating varying electrical phase differences between three antenna pairings. -
Figure 19 is a block diagram which illustrates inputs to a body coordinate processor. -
Figure 20 is a block diagram of the body coordinate processor ofFigure 19 . -
Figure 21 is an illustration of the derivation of a doppler circle. -
Figure 22 is an illustration of the derivation of an interferometric circle. -
Figure 23 is a diagram illustrating barker coded transmit and receive pulses. -
Figure 24 is a block diagram illustrating inputs to and outputs from a range verification processor -
Figure 25 is a flowchart illustrating a range verification method. - There is herein described a combination Doppler radar/interferometer to navigate an
aircraft 2 with respect to terrain features belowaircraft 2. As used herein, aircraft is used to identify all flight platforms which may incorporate a radar system, including, but not limited to, jets, airplanes, unmanned aerial vehicles, missiles, and guided weapons. The radar also functions with an electronic map, sometimes referred to herein as a digital elevation map (DEM), in determining a position ofaircraft 2. In addition to determining an altitude ofaircraft 2, an XYZ location of the nearest object toaircraft 2 on the ground, with respect toaircraft 2 in a certain terrain area can be determined. Asaircraft 2 is flying over terrain as shown in Figures la and 1b, it is important to determine a position ofaircraft 2 in accordance with a map. A Doppler filter and range gate are used with a transmittedbeam 10 from a transmit antenna. - In a general altitude range tracking radar, range is measured and indicated by measuring the time for transmitted energy to be reflected from the surface and returned. With reference to
Figure 2 , a radar transmitter repeatedly sends out bursts of electromagnetic energy at a predetermined repetition rate from an antenna, as indicated by transmitpulse 20. Following a time delay which is a function of the aircraft altitude, aground return pulse 22 is received by a receiving antenna feeding a receiver. Arange gate 30 is utilized by the tracking radar to view at least a portion ofground return 22. - Referring to
Figure 3 , three receive antennas, antenna R (right) 42, Antenna L (left) 44, and an ambiguous antenna (Ant Amb) 46, are used to receive information. Along with the three antennas, three processing channels, referred to below as left, right and ambiguous respectively, each include a receiver, a data acquisition device, range gate, and a filter. Use of the three antenna system, along with the processing described herein, provides a solution to ambiguous detected angle of the nearest object. The ambiguous detected angle is due to the spacing of the antennas being greater than the transmitted RF frequency wavelength. By receiving three returns, the processing system is able to determine an umambiguous location of the nearest object on the ground, which in turn is utilized to locate position ofaircraft 2 in body coordinates. Body coordinates are typically preferable than positioning as determined by known systems, as those systems determine position as if thebody aircraft 2 is aligned with the line of flight. Asaircraft 2 is prone to pitch, roll, and yaw, the body ofaircraft 2 is not necessarily aligned with the line of flight. - In an exemplary illustration,
antenna R 42, along with processing systems (described below) will provide a course range search which roughly determines the range to thenearest point 48 in swath 12 (shown inFigure 1 ) beforeaircraft 2 has passed over fromswath 14 intoswath 12. Determination of thenearest point 48 is performed by a wide bandwidth, high speed track loop which quickly determines the range tonearest point 48 inswath area 12.Nearest point 48 provides a starting point for a tracking loop usingantenna L 44 andambiguous antenna 46. The track loop controls the range gate to track returns from a transmit antenna. A narrow bandwidth, high precision processor is used to set range gates forantenna L 44 andambiguous antenna 46 to an exact range ofnearest point 48 based on the previous course range determination. The operation of the three receive antennas and associated processing channels provides a quick and accurate setting of a range gate on the nearest object in theDoppler swath 14 directly belowaircraft 2 so that a phase difference can be measured and along with the knownseparations 50 amongst the three antennas, a crosstrack distance to theobject 48 is determined. The crosstrack distance is the distance, horizontal and perpendicular to the body coordinates ofaircraft 2, to object 48. -
Figure 3 shows a view withaircraft 2 going into the Figure. During the phase comparison portion of the time interval, the Doppler filters of the left, right and ambiguous channels are set to select a swath 14 (shown inFigure 1 ) belowaircraft 2. Further, both range gates are set at a range directly on thenearest object 48 as previously determined. From this range,antenna R 42 receives a signal fromobject 48 at a distance of R1,ambiguous antenna 46 receives a signal from theobject 48 at a distance of RA, andantenna L 44 receives the signal fromobject 48 at a distance of R2 where the distance difference is a function of theantenna separation 50 between and amongst the three antennas. A phase processor (described below) compares the phase difference between R1 and RA, R2 and RA, and R1 and R2 once the return signals are received. As illustrated in the Figure, the exact range differences (R2-R1), (RA-R1), and (R2-RA) are from phase differences and simple trigonometry relations are used to determine the exact crosstrack distance to theobject 48 in aircraft body coordinates. - As illustrated in
Figure 3 , after the range differences (R2-R1), (RA-R1), and (R2-RA) are determined and knowing theantenna separations 50, and measured range R1, then the crosstrack distance (Y) and vertical distance (Z) can also be computed in aircraft body coordinates. It is important that the precise location ofnearest object 48 in each swath is determined so correlation can be made with the electronic maps which will accurately locate theaircraft 2 on the electronic map. For example, at typical high speed aircraft cruising velocities, a radar, configured with reasonably sized Doppler filters, has swath widths of approximately 3 metres at 1524 metres altitude. The resulting incidence angle formed by the intersection of R1 and a vertical line 27 will then be on the order of less than 3 degrees. Basic trigonometry relations show that even with a typical error (for example 1%) on the radar range gate measured distance R1, (15.24 metres at 1524 metres altitude), knowing theprecise antenna separation 50, and precise range differences (R2-R1), (RA-R1), and (R2-RA), the crosstrack distance (Y) will be precise due to the very small incidence angle encountered. -
Figure 4 illustrates a body coordinate 'system. The body coordinate system, is the coordinate system with respect toaircraft body 2. An x-axis, Xm is an axis which passes through a nose ofaircraft body 2. A y-axis, Ym, is an axis which is 90 degrees from Xm and is positive to the right ofaircraft body 2. A z-axis, Zm, is an axis which is 90 degrees from both Xm and Ym and perpendicular to a bottom ofaircraft body 2. With respect to aircraft maneuvering, a positive roll is a drop of the right wing, a positive pitch is a nose up, and a positive yaw is the nose to the right, all with respect to a line of flight. - It is known that aircraft do not typically fly in alignment with the aircraft body coordinates. Such a flight path is sometimes referred to as a line of flight. Therefore an aircraft which is flying with one or more of a pitch, roll, or yaw, and which has a hard mounted radar system, introduces an error element in a determination of target location, in body coordinates. As such radars typically operate with respect to the line of flight, a coordinate system with respect to the line of flight has been developed and is sometimes referred to as a doppler coordinate system.
Figure 5 illustrates differences between aircraft coordinates and doppler coordinates. An x-axis of the doppler coordinate system, Xd, is on the line of flight. A y-axis, Yd, and a z-axis, Zd, at right angles to Xd, respectively are defined as across Xd, and above and below Xd. - Therefore, if
aircraft 2 is flying with no pitch, roll, or yaw, the body coordinate system aligns with the doppler coordinate system. For a positive roll, Xm and Xd are still aligned, while Yd rotates below Ym and Zd rotates to the left of Zm. For a positive yaw, Xd rotates to the right of Xm, Yd rotates behind Ym, and Zd and Zm are aligned. For a positive pitch, Xd rotates above Xm, Yd aligns with Ym, and Zd rotates ahead of Zm. The complexity of having multiple of pitch, roll, and yaw, and determining a target position in aircraft body coordinates is apparent. -
Figure 6 is one embodiment of a dopplerradar processing system 200.System 200 incorporates three radar antennas which receive reflected radar pulses, the pulses having originated from a radar source. Aleft antenna 202 receives the pulses and forwards the electrical signal toreceiver 204.Receiver 204 forwards the received radar signal to adata acquisition unit 206. Aright antenna 208 receives the pulses, at a slightly different time thanleft antenna 202, and forwards the electrical signal toreceiver 210.Receiver 210 forwards the received radar signal to adata acquisition unit 212. Anambiguity antenna 214 also receives the reflected radar signal, and passes the received signal to acirculator 216.Circulator 216 functions to direct the transmit signal to the antenna, and to direct the received signal from the antenna toreceiver 220, thereby allowing a single antenna to be used for both transmitting and receiving.Receiver 220 forwards the received signal to adata acquisition unit 222. -
Data acquisition unit 206 provides a digital signal representative of the signal received atleft antenna 202 to a leftphase pre-processing unit 224. Similarly, representative signals are received atpre-processing units data acquisition units Data acquisition units pre-processing units - A
phase processor 230 receives gated, filtered signals, representative of left, right, and ambiguity signals received at the antennas, and determines a phase relationship between each of the left and ambiguous signal, the right and ambiguous signals, and the right and left signals. The phase relationships between the signals are used, along with slant range, velocity and attitude readings in a phaseambiguity processing unit 232 to determine an interferometric angle to a target. A body coordinateprocessor 233 utilizes the interferometric angle to determine an XYZ position of, for example, anaircraft employing system 200 with respect to a current aircraft position, sometimes referred to herein as aircraft body coordinates. - A signal from
data acquisition unit 222 is also received at an automatic gain control (AGC)unit 234. A signal fromAGC unit 234 is passed topre-processing units pre-processing unit 236 is passed to rangetrack processor 242 which provides a slant range signal to phaseambiguity processing unit 232 and altitude information.Pre-processing unit 238 passes a filtered signal to arange verification processor 244.Pre-processing unit 240 passes a filtered signal to arange level processor 246, which also provides a feedback signal toAGC 234. -
Figure 7 is a block diagram of adigital processing section 300 for system 200 (shown inFigure 6 ). Components insection 300, identical to components ofsystem 200, are identified inFigure 7 using the same reference numerals as used inFigure 6 .Section 300 includespre-processing units processors pre-processing units gate correlator 302, a correlationband pass filter 304, a baseband I/Q mixer 306, and a swathband pass filter 308. Afilter coefficients processor 309, in one embodiment, is configured to provide at least a filter center frequency in hertz, Fc, a filter bandwidth in hertz, B, and a filter sampling frequency in hertz, Fs, to swathband pass filter 308, which uses Fc, B, and Fs in determination of filter coefficients. In one embodiment,processor 309 receives as input, an antenna mounting angle, velocity vectors in body coordinates, a pitch, and a slant range. -
Figure 8 is a block diagram of a correlation band pass filter 304 (also shown inFigure 7 ). Aninput signal 310, sometimes referred to as x(0), is fed into a summingelement 312. An output of summingelement 312 is multiplied by acoefficient 313, which, in one embodiment has a value of 1/K1 (further described below). After multiplication bycoefficient 313, anoutput signal 314, sometimes referred to as y(0), is generated. Another input into summingelement 312 is provided byinput signal 310 being delayed by a twosample delay element 316, whose output, sometimes referred to as x(-2), is fed into summingelement 312. Further,output signal 314 is fed back into a second twosample delay element 318, whose output, sometimes referred to as y(-2), is multiplied by asecond coefficient 319, and fed into summingelement 312. In one embodiment,coefficient 319 has a value of K3. Therefore, a present output, y(0) is calculated as y(0) = (1/K1)x[x(0) - x(-2)] - (K2 x y(-2)), where K1 = C + 1, K3 = C-1, K2 = K3 / K1, and C = 1 1/Tan(π x bandwidth / fsample) where bandwidth and sample frequency are in hertz, and the angle for which the tangent is to be calculated is in radians. - In alternative embodiments,
filter 304 is configured to filter range ambiguity spectrum lines, filter out-of-band interference signals and stretch the input signal, which is a pulse, to a continuous wave (CW) signal.Filter 304, in one embodiment, receives as input an output of gate/correlator 302 (shown inFigure 7 ) at a sample rate of 100 MHz, an IF frequency of 25MHz, and has a bandwidth of 10KHz. Therefore, in this embodiment, there are four samples per IF frequency period. - A sample clock at 100 MHz provides samples at a 10 nsec rate. For example, a 4µsec pulse repetition interval (PRI) (N = 400 clocks per PRI) and two sample gate width, results in two non-zero gated return samples, x(0) and x(1), and 398 zero amplitude samples, x(2) - x(399), into
correlation filter 304 during one PRI. In order to provide a filter of reasonable processing size and speed, the zero amplitude samples which do not affect filter output are not processed byfilter 304. Therefore, past outputs, for example y(-2), required in the filter feedback configuration, as illustrated bydelay elements - In addition, one of the past outputs, y(-1), is not used because it has a feedback multiplier with a value of nearly zero in one embodiment of
filter 304, because of the narrow 10 kHz bandwidth. - In one exemplary embodiment, where Fsample = 100 MHz, center frequency = 25MHz, and Bandwidth = 8 KHz, coefficients are calculated as K1 = 3979.873661, K3 = 3977.873661, and K2 = 0.9994974715. Let P = the number of samples in a PRI. Filter 304 starts calculating at the beginning of a gate width and continues for two counts after the end of the gate width. After the gate width +2 counts the next step is to calculate y(-2) and y(-1) and wait for x(P) data, the beginning of the next gate width, where x(P) is equivalent to x(0). Table 1 illustrates a general procedure for operation of
filter 304, for low altitude radar data, track and phase gate of two sample widths, and a PRI of 400µsec. The calculation for filter output y(0) requires filter output y(-2). The example of Table 2 example illustrates calculation of y(-2) where N = 400, if PRI = 4µsec.Table 1. Correlation Filter Algorithm Example x(N) Count (N) Algorithm 0 397 y(-3) = y(397) 0 398 y(-2) = y(398) 0 399 y(-1) = y(399) x(0) 0 y(0) = (1 / K1)[x(0) - x(-2)] - [K2 x y(-2)] x(1) 1 y(1) = (1 / K1)[x(1) - x(1)] - [K2 × y(-1)] 0 2 y(2) = (1 / K1)[x(2) - x(0)] - [K2 × y(0)] 0 3 y(3) = (1 / K1)[x(3) - x(1)] - [K2 × y(1)] 0 4 y(4) = 0 - K2xy(2) = -K2xy(2) = (-K2)1×y(2) 0 5 y(5) = 0 - K2xy(3) = -K2×y(3) = (-K2)'xy(3) 0 6 y(6) = 0 - K2xy(4) = -K2×y(4) = -K2[(-K2)xy(2)] = (-K2)2×y(2) 0 7 y(7) = 0 - K2xy(5) = -K2xy(5) = -K2[(-K2)xy(3)] = (-K2)2×y(3) 0 8 y(8) = 0 - K2×y(6) = oxy(6) _ -K2[(-K2)x(-K2)xy(2)] = (-K2)3×y(2) 0 9 y(9) = 0 - K2×y(7) = -K2xy(7) = -K2[(-K2)x(-K2)xy(3)] = (-K2)3×y(3) 0 10 y(10) = 0 - K2xy(8) = -K2×y(8) = -K2[(-K2)x(-K2)x(-K2)xy(2)] = (-K2)4xy(2) 0 11 y(11) = 0 - K2xy(9) = -K2xy(9) = -K2[(-K2)x(-K2)x(-K2)xy(3)] = (-K2)4 xy(3) - In one embodiment, y(399) becomes y(0) if a range gate is moved in an inbound direction. The resulting P becomes 399. If a range gate is moved in an outbound direction, y(1) becomes y(0), and the resulting P becomes 401. Algorithms shown for determination of y(4) through y(11) are used to formulate a general algorithm equation.
- In addition to an example illustration of calculation of y(-2) with a P of 400 and a gate width of two clock counts, Table 2 also illustrates a general algorithm equation for counts (N) greater than three, (i.e. y(N) = (-K2)M x y(2), for N even and y(N+1) = (-K2)M x y(3), where M = (N(even)/2) - 1.
Table 2 - General Algorithm Equation after N =3 Ein Count (N) Algorithm 0 396 y(-4) = (-K2)197 × y(2) 0 397 y(-3) = (-K2)197 × y(3) 0 398 y(-2) = (-K2)198 × y(2) 0 399 y(-1) = (-K2)198 × y(3) x(0) 0 y(0) = (1 / Kl)[x(0) - x(-2)] - [K2 x y(-2)] x(1) 1 y(1) = (1 / K1)[x(1) - x(-1)] - [K2 x y(-1)] 0 2 y(2) = (1 / K1)[x(2) - x(0)] - [K2 x y(0)] 0 3 y(3) = (1 / K1)[x(3) - x(1)] - [K2 x y(1)] - In the embodiment described, for y(0) through y(3), the filter algorithm is calculated because new x(N) and/or y(N) data are available. After the y(3) algorithm calculation, y(398) and y(399) are calculated, and the filter algorithm is configured to wait for x(400) data, where x(400) is equivalent to x(0). If a range tracking algorithm dictates that x(0) be x(399), that is, the range gate causes the PRI to be shortened, then y(397) and y(398) are calculated. If the range tracking algorithm dictates that x(0) be x(401), that is, the range gate causes the PRI to be increased, then x(399) and x(400) are calculated. The signal phase is preserved by using the correct x(0) and y(-2). The PRI is not limited to 4µsec and can have a wide range of values. The filter algorithm is configured to set the N counter to count to 400 on the next cycle unless the range tracking algorithm requires 399 or 401 counts. In general, a filter configured similarly to filter 304 is capable of removing up to about 95% of the mathematical operations that are required in known filter processing schemes.
- Another exemplary embodiment of
filter 304, for high altitude operation, incorporates a Barker code. Table 3 illustrates an exemplary embodiment, with a chip width equal to four, a PRI of 4µsec, and P=400. In the exemplary embodiment, a 13 bit Barker code is used, and inputs x(0) and x(1) are data, x(2) and x(3) are filled with zeros, x(4) and x(5) are data, x(6) and x(7) are filled with zeros, and the pattern continues until N is equal to 51. Generally, the algorithm for N greater than 51 is given as y(N) = (-K2)M x y(50), for N even, and y(N+1) = (-K2)M x y(51), where M = (N(even) -50)/2) - 1.Table 3 - Barker codes at high altitudes example x(N) Count (N) Algorithm 0 397 y(-3) = y(397) 0 398 y(-2) = y(398) 0 399 y(-1) = y(399) x(0) 0 y(0) = (1 / K1)[x(0) - x(-2)] - [K2 x y(-2)] x(1) 1 y(1) = (1 / K1)[x(1) - x(-1)] - [K2 × y(-1)] 0 2 y(2) = (1 / K1)[x(2) - x(0)] - [K2 x y(0)] 0 3 y(3) = (1 / K1)[x(3) - x(1)] - [K2 x y(1)] x(4) 4 y(4) = (1 / K1)[x(4) - x(2)] - [K2 x y(2)] x(5) 5 y(5) = (1 / K1)[x(5) - x(3)] - [K2 x y(3)] - - - - - - - - - 0 396 y(-4) = y(396) = (-K2)172 x y(50) 0 397 y(-3) = y(397) = (-K2)172 x y(51) 0 398 y(-2) = y(398) = (-K2)173 x y(50) 0 399 y(-1) = y(399) = (-K2)173 x y(51) x(0) 0 y(0) = (1 / K1)[x(0) - x(-2)] - [K2 x y(-2)] x(1) 1 y(1) = (1 / K1)[x(1) - x(-1)] - [K2 x y(-1)] 0 2 y(2) = (1 / K1)[x(2) - x(0)] - [K2 x y(0)] -
Figure 9 is a block diagram of abaseband IQ mixer 306.Mixer 306 is configured to reject negative Doppler shifts on the IF (Intermediate Frequency) input signal, which are behindaircraft 2, while allowing a positive doppler shift signal, from ahead ofaircraft 2 to pass through. The positive doppler shift signal is equally forward as the negative doppler shift signal is behind. Referring specifically tomixer 306, an IF in-phase portion includes amixer 322 configured to operate at a frequency which is 1/PRI, where PRI is a radar pulse repetition interval, which converts the in-phase IF signal to Baseband (Doppler) frequency. Also included in the in-phase portion are alow pass filter 324, adecimator 326, and an allpass filter 328. Referring specifically tomixer 306, an IF quadrature portion includes adelay element 330, which produces the IF quadrature signal, and amixer 332 configured to operate at a frequency which is 1/PRI, where PRI is a radar pulse repetition interval, which converts the quadrature IF signal to Baseband (Doppler) frequency. Also included in the quadrature portion are alow pass filter 334, adecimator 336, and an allpass filter 338. All pass filters 328 and 338 are configured to produce Baseband (Doppler) quadrature signals, which are received at adifference element 340, where the output of the all-pass filter 338 is subtracted from the output of the all-pass filter 328. The resulting difference signal contains the positive or forward-looking Baseband (Doppler) signal, which is received atswath bandpass filter 308. - In particular embodiments, a frequency of data received at
mixer 306 is 25 MHz, and is referred to as an IF (intermediate frequency) signal.Mixer 306 in one embodiment, is configured to convert the 25 MHz IF signal to baseband (or Doppler) frequencies, and further configured to reject negative Doppler frequencies. In specific embodiments,mixers correlation bandpass filter 304 to a 25 kHz sample rate. Specifically, in the embodiment shown, the allowed PRIs include 200, 400, 500, 800, and 1000. - For purposes of description, a current input to
low pass filter 324 is given as x1(0). A current output of thelow pass filter 324 is then given as y1(0) = (1 / K1)[x1(0) + x1(-1)] - [K2 × y1(-1)], where x1(-1) and y1(-1) are respectively the previous input and output of thelow pass filter 324. A current input tolow pass filter 334 is given as x0(0). A current output of thelow pass filter 334 is then given as y0(0) = (1 / K1)[x0(0) + x0(-1)] - [K2 × y0(-1)], where x0(-1) and y0(-1) are respectively the previous input and output of thelow pass filter 334. K1 is 1 + (1 / tan(πfo/Fs2), and K2 is 1 - (1 / tan(πfo/Fs2), where fo is bandwidth and Fs2 is a sampling frequency of low pass filters 324 and 334. In one embodiment, the sampling frequency of low pass filters 324 and 334 is the received signal frequency, Fs1, of 100 MHz divided by the pulse repetition interval. - The signals output from low pass filters 324 and 334 are further down sampled at
decimators decimators filters -
Figure 10 is a block diagram 350 of Baseband (Doppler) in-phase all-pass filter 328 and Baseband (Doppler) quadrature all-pass filter 338. In one embodiment, all-pass filter 328 and all-pass filter 338 include four cascaded second-order infinite impulse response (IIR) filters, configured to generate Baseband (Doppler) quadrature signals. Referring specifically to all-pass filter 328, it includesfilter elements pass filter 338, it includesfilter elements -
Figure 11 is a block diagram of one embodiment of afilter element 380.Element 380 is a representation of all offilter elements Figure 9 ). The following description refers specifically toelement 380, consisting ofdelay elements element 386, and gainelements current input 382 is referred to as x(0). Thecurrent output 390 is then given as y(0) = [ (A0 * x(0)) + (A1 * x(-1)) + (A2 * x(-2)) - (B1 * y(-1)) - (B2 * y(-2)) ] / B0, where x(-1) and y(-1) are respectively the previous input and output offilter element 380, and x(-2) and y(-2) are respectively the previous-previous input and output offilter element 380. A0, A1, A2, B1, and B2 refer to the gain block coefficients. - In one specific embodiment, the above equation is applicable for all of
filter elements Figure 9 ). The following are the coefficients for each filter element, theelements - Element a








- Element b








- Element c








- Element d








- Element e








- Element f








- Element g








- Element h








-
Figure 12 is a block diagram of one embodiment of a swathband pass filter 308.Filter 308 is a first order band pass filter which is centered on the doppler frequency.Filter 308 receives as input a signal, En, output from IQ mixer 306 (shown inFigure 9 ). Further inputs include a filter center frequency in hertz, Fc, a filter bandwidth in hertz, B, and a filter sampling frequency in hertz, Fs, which are provided. - A filtered output signal, Eo, is determined according to Eo = (A0/B0) x En - (A0/B0) x En x Z-2 - (B1/B0) x Eo x Z-1 - (B2/B0) x Eo x Z-2. Referring specifically to filter 308, the input signal,
En 422 is received and multiplied by acoefficient 424, with a value of A0/B0, and then applied to a summingelement 426. The output of summingelement 426 isfilter output 428.Input 422 is also delayed two counts by a twosample delay element 430 whose output is multiplied bycoefficient 432, with a value of -A0/B0, and then applied to summingelement 432. -
Output 428 is multiplied by asample delay element 434, whose output is multiplied by acoefficient 436, with a value of -B1B0, and then applied to summingelement 432.Output 428 is also multiplied by a twosample delay element 438, whose output is multiplied by a coefficient 444, with a value of -B2/B0, and then applied to summingelement 432. Coefficients forfilter 308 are determined according to Wb = 2πB, which is bandwidth in radians, Wu = 2π x (Fc + B/2), which is an upper 3db point offilter 308 in radians, and W1 = 2π x (Fc - B/2), which is a lower 3db point offilter 308 in radians. The coefficient A0 is 2 x Fs x Wb, B0 is (4 x Fs2) + (2 x Fs x Wb) + (W1 × Wu), B1 is (2 x W1 x Wu) - (8 × Fs2), and B2 = (4×Fs2) - (2 x Fs x Wb) + (W1 x Wu). -
Figure 13 is a block diagram of a filter coefficients processor 309 (also shown inFigure 7 ) which, in one embodiment, is configured to provide inputs to swath band pass filters 308 (shown inFigures 7 and12 ).Processor 309 is configured to provide center frequencies Fc, for range swaths and phase swaths, and filter bandwidths, B, in hertz, for track and phase swaths and level and verify swaths. By controlling swath filter center frequencies,processor 309 is able to keep the doppler swath centered in the antenna beam. Also filter bandwidth is controlled. The filter bandwidth is directly related to a down track swath width on the ground such that a charge time forfilter 308, inversely but directly related to bandwidth, is equal to the time it takesaircraft 2 to fly across the swath width. Therefore, filter bandwidth is matched to velocity ofaircraft 2, and requires minimal processing. By knowing the antenna mounting angle, and the pitch of the aircraft, an angle to the antenna beam center is known, as described below, and a center frequency is calculated, generally, according to Fc = 2 x Velocity × sin (angle) / radar wavelength. - Referring specifically to
processor 309, an antenna mounting angle and velocity vectors in body coordinates are input to determine a doppler velocity,Vr 460, at a range swath center frequency according to Vr = Vv x Cos(90-r-a) = Vv x Sin(a + r), where Vv = (Vx2 + Vz2)0.5, where Vx = velocity component on body x axis and Vz = velocity component on body z axis, a = ATan(Vz / Vx), and r is the antenna mounting angle. A range swath center frequency,Fr 462 is determined according to Fr = 2 x Vr / L, where L is a wavelength, and in one specific embodiment, is 6.983 cm. A velocity component on body y axis, Vy, is not used to center swath in antenna beam as the component has a value of zero since the antenna is fixed to a y axis of the body. -
Processor 309 is also configured to determine a phase swath doppler velocity,Vp 464, which is delayed behind the range swath by a time equal to the range processing delay. Vp is calculated as Vp = Vv x Cos(90-(r-p)-a) = Vv x Sin(a + r - p), where Vv = (Vx2 + Vz2)0.5 , where Vx = velocity component on body x axis and Vz = velocity component on body z axis, a = ATan(Vz / Vx), r is the antenna mounting angle, and p = (T x Vx / H) x (180 / π) in degrees, where T = 1 / πB and is a delay through range swath filter, T x Vx is vehicle movement on body X axis, B is the swath bandwidth, and H is altitude in feet. Phaseswath center frequency 466 is calculated according to Fp=2 x Vp / L, where L is a wavelength, and in one specific embodiment, is 6.983 cm. -
Processor 309 is configured to determine a track and phase swath bandwidth,B 468 according to B = Vx / (0.6(H)0.5) in hertz, where H is altitude in feet. A level and verifyswath bandwidth 470 is calculated as a ratio of level and verify bandwidths to track and phase bandwidths, K, multiplied by track andphase swath bandwidth 468.Figure 14 is a vector diagram 500 which illustrates the calculations above described. In one embodiment, if the radar is in a range search mode, search range instead of altitude is used to calculate bandwidth. - Together, filters 308 and
processor 309 automatically configure the radar doppler filter center frequency and bandwidth to achieve better radar performance over varying terrain and varying aircraft altitude, roll, and pitch than known systems. The determined center frequency operates to maintain the radar swath at an approximate center of the antenna beam. The calculated bandwidth is a bandwidth that controls the track swath width on the ground, and is calculated such that the filter time constant is equal to the time it takes the vehicle to move a corresponding swath width distance. The bandwidth corresponds to a time over the target and provides information as to how long a second swath lags a first swath. Phase channel swaths are set behind in position to account for a processing time of range processor 242 (shown inFigure 7 ). The calculations of center frequency and bandwidth provide a mechanism for keeping a swath slightly in front of the aircraft such that a positive doppler shift is realized. -
Figure 15 is a block diagram of a phase processor 230 (also shown inFigures 6 and7 ).Phase processor 230 includes threephase detectors phase detectors Phase processor 230 is configured to receive processed radar return data, from swath band pass filters 308 (shown inFigure 7 ), as described above, for all of a left channel, a right channel, and an ambiguous channel. Determination of phase difference in return data for the three channels allows for an accurate position determination for an object from which radar data was returned. - In the embodiment shown,
phase detector 510 is configured to receive ambiguous channel return data as input, with left channel return data as a reference, and further configured to determine and output a phase difference between the left and ambiguous channels.Phase detector 512 is configured to receive right channel return data as input, with ambiguous channel return data as a reference, and further configured to determine and output a phase difference between the ambiguous and right channels.Phase detector 514 is configured to receive right channel return data as input, with left channel return data as a reference, and further configured to determine and output a phase difference between the left and right channels. -
Figure 16 is a block diagram of phase detector 510 (shown inFigure 15 ).Phase detectors Phase detector 510 incorporates a plurality of in-phase all passfilters 328 and quadrature all pass filters 338 (shown above inFigures 9 and10 ). Specifically, an input is received at a first in-phase filter 520 (AP1.1) and a first quadrature filter 522 (AP1.2). A reference input is received at a second in-phase filter 524 (AP2.1) and a second quadrature filter 526 (AP2.2). Amultiplier 532 is configured to multiply outputs fromfilters multiplier 534 is configured to multiply outputs fromfilters third multiplier 536 is configured to multiply outputs fromfilters fourth multiplier 538 is configured to multiply outputs fromfilters multiplier 534 is subtracted from an output ofmultiplier 532 with asubtraction element 540 which produces aY output 542. An output ofmultiplier 536 is added to an output ofmultiplier 538 with anaddition element 544 which produces anX output 546. Aprocessing element 548 is configured to determine an arctangent ofY output 542 divided byX output 546, which is the phase difference, in radians, between the input and the reference input. - In mathematical form,
Y output 542 is calculated as Y = (AP1.1 x AP2.2) - (AP1.2 x AP2.1),X output 546 is calculated as X = (AP 1.1 x AP2.1) + (AP1.2 x AP2.2), and the phase difference is ATAN (Y/X). - In one embodiment, in-
phase filters quadrature filters Figure 10 . Further, in the embodiment, filters 520 and 524 are configured to include in-phase filter elements Figure 10 ) and are configured with coefficients which correspond to elements a, b, c, and d respectively as described above. Referring toquadrature filters quadrature filter elements Figure 10 ) and are configured with coefficients which correspond to elements e, f, g, and h respectively as described above. - Once phase differences between the right, left, and ambiguous channels has been determined, as described above, the phase differences are used, in one embodiment, to determine and interferometric angle to the target.
Figure 17 is a block diagram of phase ambiguity processing unit 232 (also shown inFigure 6 ). In one embodiment, phaseambiguity processing unit 232 is configured to receive an electrical phase difference between the ambiguous channel and the left radar channel fromphase detector 510, an electrical phase difference between the right channel and the ambiguous radar channel fromphase detector 512, and an electrical phase difference between the right channel and the left radar channel fromphase detector 514. - Phase
ambiguity processing unit 232 includes a phase bias adjustunit 570 which provides a phase shift value which compensates for phase shifts which occur in the routing of the radar signals, from receipt at an antenna and through cabling and processing areas withinaircraft 2. It is accepted that most phase shifting of signals occurs due to cabling for the routing of signals. Phase bias adjust 570 compensates for the ambiguous channel with respect to the left radar channel. Phase bias adjust 572 compensates for the right channel with respect to the ambiguous radar channel. Phase bias adjust 574 compensates for the right channel with respect to the left radar channel. - The compensated phase difference signals are received at a
phase ambiguity resolver 576. In one embodiment,phase ambiguity resolver 576 is implemented using software, and determines a physical (interferometric) angle to a target which originally reflected the radar signals received. Phase ambiguity resolution is further described below. After resolution of phase ambiguous signals, the physical angle signal is filtered utilizing a low-pass filter 578, and an angular position of the target with respect to aircraft body coordinates (X,Y,Z) is determined from the physical angle to the target using body coordinates processor 233 (further described below). The determined position, in one embodiment, is 90 degrees minus a half angle of a cone whose axis is a Y-axis of the body ofaircraft 2. The target is on the cone surface, therefore providing the subtraction from 90 degrees above described.Table 4: Phase Ambiguity Resolution Matrix θLA θ1=θLA Φ=sin-1(θ1/K1) θ1=(θLA-360) Φ=sin-1(θ1/K1) e1 =(θLA+360) Φ=sin-1(θ1/K1) θAR θ1=θAR Φ=sin-1(θ1/K2) θ1=(θAR-720) Φ=sin-1(θ1/K2) θ1=(θAR-360) Φ=sin-1(θ1/K2) θ1=(θAR+360) Φ=sin-1(θ1/K2) θ1=(θAR+360) Φ=sin-1(θ1/K2) θLR θ1 = θLR θ1=(θLR-720) θ1=(θLR-360) θ1=(θLR+360) θ1=(θLR+360) Φ=sin-1(θ1/K3) Φ=sin-1(θ1/K3) Φ=sin-1(θ1/K3) Φ=sin-1(θ1/K3) Φ=sin-1(θ1/K3) θLR θ1=(θLR-1080) Φ=sin-1(θ-1/K3) θ1=(θLR-F1080) Φ=sin-1(θ1/K3) - Table 4 is a phase ambiguity resolution matrix which is utilized, in one embodiment, to determine a physical angle to a target based upon electrical phase differences. A calculated electrical angle phase difference, θ, is equivalent to [(360xS)/λ]x sin(Φ) or K x sin(Φ), where Φ is the physical angle of the target in aircraft coordinates, S is a separation between the two antenna elements in feet, and λ is a wavelength of the radar signal in feet. In one particular embodiment, separation between the left antenna and the ambiguous antenna is 8.891 cm, separation between the ambiguous antenna and the right antenna is 21.59 cm, and the separation between the left antenna and the right antenna is 30.48 cm. In the embodiment, the wavelength of the radar is 6.983 cm. Therefore, in the embodiment, and referring to Table 4, K1 is (360x8.891)/6.983, or about 458.4, K2 is (360x21.59)/6.983, or about 1113.25, and K2 is (360x30.48)/6.983, or about 1571.64. Physical angles are then determined according to Φ=sin-1(θ/K).
- As antenna separation, radar wavelength, and aircraft position may all affect a timing of radar signals received at the various antennas, phase differences, which are determined as described above, will change at varying rates. In the embodiment illustrated in Table 4, physical angles are calculated for multiple electrical phase differences, and the true physical angle is a solution which provides approximately the same physical angle calculation, in each of the three rows (within a couple of degrees). Using the first antenna pairing (left and ambiguous), and based on antenna separation, three possible physical angles are determined from the electrical phase difference received from
phase detector 510. As the second antenna pairing (ambiguous and right) are further apart, five possible physical angles are determined. The last antenna pairing (left and right) are the furthest apart, therefore seven possible physical angles are determined. As described above, one of the physical angles from each group of physical angle calculations, will be roughly equivalent, thereby providing an unambiguous physical angle solution. In such a system it is important to note that separation in antenna pairing cannot be a multiple of radar wavelength. -
Figure 18 is achart 600 illustrating varying electrical phase differences between three antenna pairings.Chart 600 helps to illustrate the process above described. As varying electrical phase differences between the three antenna pairings are charted, a single mechanical (physical) angle can be determined from the varying electrical phase difference plots for each antenna pairing. That is, for a physical angle, there is one solution which provides a phase difference for each radar channel grouping which is approximately equivalent to the calculated phase differences for the channel groupings. -
Figure 19 is a block diagram which illustrates inputs to and outputs from body coordinate processor 233 (also shown inFigure 6 ). Processor receives the phase detector angle to the target fromphase ambiguity resolver 576 via low pass filter 578 (described above inFigure 17 ).Processor 233 further receives the doppler swath filter center frequency, and the filter bandwidth, a range to the target in feet, and velocity in pitch, roll and azimuth. Utilizing the processing described below,processor 233 is configured to determine a distance to the target in aircraft body coordinates. In one embodiment, the distance is determined in feet for aircraft body coordinates x, y, and z.Processor 233 further determines a velocity with respect to aircraft body coordinates in x and z. -
Figure 20 is a detailed block diagram of body coordinateprocessor 233 ofFigure 19 . Target range, vehicle velocity in pitch, roll, and azimuth, plus the swath filter center frequency and bandwidth are input into a dopplercircle equation processor 620, which is configured to determine doppler circle equations. The circle is determined using the swath filter center frequency equation Fc = [2xVxcos(β)]/L, where V is velocity, L is wavelength, and β is an angle with respect to a line of flight, which is determined through manipulation of the above equation. Therefore, β=cos-1 ((FcxL)/(2xV)). A radius of the doppler circle, Rd, is calculated according to Rd = target range x sin (β). A distance of the doppler circle, Xd, from the aircraft is determined according to Xd = target range x cos (ß).Figure 21 is provided to illustrate the equations with regard to the doppler circle as derived above. - An example calculation is used to further illustrate. Inputs to doppler
circle equation processor 620 include a range to target of 609.6 metres, a velocity of 244 m/second, a wavelength of 6.983 cm, and a doppler swath filter center frequency of 1213 Hertz. The angle with respect to the aircraft line of flight, ß, is determined as b= cos-1((1213x0.229)/(2x800)) = 80 degrees. The doppler circle radius, Rd, is 609.6 x sin(80) = 600 m, and distance of the doppler circle, Xd, is 609.6 x cos(80) = 105.8 m. - Again referring to
Figure 20 ,processor 233 further includes an interferometriccircle equation processor 622 which is configured to determine interferometric circle equations in body coordinates.Processor 622 receives as input a target range and the interferometric angle (or phase detector angle), a, to the target as calculated by phase ambiguity resolver 576 (shown inFigure 17 ). An interferometric circle radius, Ri, is calculated as Ri = target range x cos(a). A location of the interferometric circle on a Ym axis is determined as Ym = target range x sin(a). Referring to the example above, and including an interferometric angle input of 15 degrees, the radius of the interferometric circle, Ri, is 609.6 x cos(15), or 588.9 m. The location of the circle on the Ym axis, Ym is 609.6 x sin(15), or 157.9 m.Figure 22 is provided to illustrate the equations with regard to the interferometric circle as derived above. - Again referring to
Figure 20 , a doppler to body coordinatetransformation processor 624 withinprocessor 233 uses the doppler circle equation, and pitch, roll, and yaw inputs to transform the doppler circle into body coordinates. Finally, atintersection processor 626 which is configured to solve equations to determine an intersection of the interferometric circle equation with the doppler circle equation that has been transformed into body coordinates. - In one embodiment, transforming begins by a determination of a velocity vector in body coordinates, from navigation data, N, (in pitch, roll, and yaw) according to


- Velocity unit vectors (direction cosines) are given in body coordinates as

-
Intersection processor 626 is configured to determine body coordinates which are calculated as X1 = D x ax , Y1 = D x ay , Z1 = D x az, where the velocity vector D, is given as R x cos(β), and β = cos-1(FcxL/2xV). B is the doppler cone angle, Fc is the swath filter center frequency, R is the range to the target, V is (Vx 2 + Vy 2 + Vz 2)1/2, and L is the wavelength of the radar. - A position of the target in body coordinates is also calculated by
intersection processor 626 as y = R×sin(A), where A = measured phase angle in body coordinates. The coordinate z is calculated as z = (-b ± (b2-4ac)1/2) / (2xa), where a = 1 + (Z1/K1)2, b = (-4Z1 XKT/(2X1)2), and c = (KT/2X1)2 - KA. KA is calculated as (Rxcos(A))2 , KB is calculated as (R x sin (B))2, KY=(y—Y1)2, and KT is calculated as KT = KA+KY-KB+XI 2+Z1 2. The coordinate x is calculated according to x = (KA-z2)1/2. - While determining a position of a radar target with respect to, for example, an aircraft body, as described in detail above is necessary, it is also necessary in certain application to determine a range to a target. As is well known, in high altitude radar operations, it is possible that multiple radar transmit pulses will be transmitted before a return pulse is received. This is sometimes referred to as the ambiguous radar range problem.
Figure 23 illustrates one solution to the problem, the solution being to modulate radar transmitpulses 650 with a phase code. Implementation of the code, which involves a phase shifting of individual pulses of radar transmitpulses 650, allows a synchronization of transmitpulses 650 with return pulses 652 which are received by a radar. Synchronization of the phase encoded radar pulses with the returned pulses is sometimes referred to as correlation. - In one embodiment, correlation is accomplished by implementation of a encoded radar scheme, and by looking for deviations in the return pulses from a reference, or starting altitude.
Figure 24 is a block diagram illustrating inputs to and outputs from range verification processor 244 (also shown inFigures 6 and7 ). In one embodiment,verification processor 244 is configured to step through encoded return signals and determine a main lobe of the return signal to determine a range to, for example, a target. -
Verification processor 244 is configured to receive as inputs, a detected radar return, which has been gated and demodulated.Verification processor 244 also receives as input a present internal range to the target, and a command from the radar search logic to be in either of a search mode or an acquisition mode.Verification processor 244 is configured with a variable mainlobe threshold factor (described below) and a verification dwell time, which is thetime processor 244 is allocated to determine if an amplitude of a return signal exceeds the threshold factor. A verify status output is set true of the amplitude of the radar return exceeds the threshold value, thereby signifying that the transmit radar pulses and return radar pulses are correlated. If not correlated, the verify status output is false, andprocessor 244 provides a corrected range position to range processor 242 (shown inFigure 7 ). -
Figure 25 is aflowchart 670 illustrating one embodiment of an autocorrelation process performed byprocessor 244. Referring toflowchart 670, a verify gate is set 672 to an internal range, from one of track or search. It is then determined whether a radar return is acquired 674 from within a verify gate, the gate attempting to align the chips of transmitted and received codes. If no target is acquired 674, thenprocessor 244 is configured to return to reset the verify gate. If a target is acquired 674, then an amplitude of the return is determined 676. In addition, the threshold factor is set to, for example, four times the determined amplitude and a counter is set to zero. The verify gate is stepped 678 out one chip of the code, the counter is incremented, and a dwell time passes before an amplitude of a return is again read. If the amplitude read is determined 680 not to be above the threshold factor, the counter is checked 682. If the counter is determined to be less than one less than the number of chips within the barker code, the verify gate is again stepped 678, and the steps are repeated, until the threshold factor is exceeded or the counter is equal to one less than the number of chips within the code. In one exemplary embodiment, a thirteen bit code is used, therefore the counter has a maximum value of twelve. In one embodiment barker codes are used for encoding the radar signals. - If the threshold factor is not exceeded, the original acquisition is an acquisition on the main lobe of the return, and the transmit and return codes are aligned, and the internal range as determined by
processor 244 is correct, resulting in a verification status being set 684 to verify. - If the threshold factor is exceeded, then the transmit and return codes have become aligned. If the internal range has been moved 686 more than two range gates, the process illustrated by
flowchart 670 begins anew. If there is a less than tworange gate movement 686, the search logic of the radar is set 688 to not verify, and is moved by the value of the counter, in order to align the transmit and receive barker codes. The process illustrated byflowchart 670 again begins. The continuous processing of encoded radar transmit and return signals by processor, provides a favorable solution to the known radar range ambiguity problem by constantly stepping through the codes to ensure receipt of an unambiguous radar range return. - In one embodiment, the above described verification processing for radar range ambiguity is applied continuously during flight, not just during initial acquisition. In utilization of such a system, the verification processing is applied in order to resolve range ambiguity during acquisition, but the processing is continuously applied after acquisition, throughout the flight. The continuous processing is done in order to ensure that if the transmit and received pulses become misaligned (loose correlation) the misalignment will both detected and corrected. Loss of correlation could occur due to, for example, a range discontinuity due to severe aircraft rolls or a sudden change in terrain (i.e. flying over a cliff).
- The verification processing is further illustrated through an example. In one embodiment, a phase code is used to resolve radar range ambiguities and particularly a 13 bit phase code provides 20xlog(13) or 22dB of rejection to range sidelobes. However, if
verification processor 244 should, for some reason, line itself on an ambiguous side lobe, even if the mainlobe is for example 22dB higher in amplitude,verification processor 244 will stay aligned with the sidelobe as long as there is a greater than 22dB sensitivity margin. As stated above, one such example is flying over a sharp and deep cliff where a maximum radar track rate is less than a rate at which the range changes over the cliff. However, in practice, and assuming an ambiguous range sidelobe is lined up, a transition to a decreased sensitivity margin will normally result in a less than sufficient margin to track the ambiguous range side lobe. Examples include flying over poor reflectivity ground or encountering a severe aircraft roll. The result isverification processor 244 realigning into a proper and unambiguous line up onto the main lobe. Thus an ambiguous radar range does, after some time, normally correct itself. However, and especially with auto pilot systems, severe and dangerous aircraft altitude corrections will result during the time of this very undesirable ambiguous range condition. - The method illustrated in
flowchart 670 resolves the above illustrated situation by continuously searching for the main lobe, while tracking what is believed to be the correct position, or lobe. If during the ambiguity processing, or verification background search, it is determined that an ambiguous range is being tracked, an immediate correction is made to get the radar onto the correct range (i.e. the main lobe). To detect if the radar is on an ambiguous range track, the 20LogN equation is utilized to continuously determine differences between the main lobe, and undesired side lobes. - The above described methods and systems describe a digital signal processing solution to known radar target position and range ambiguity problems. Use of digital signal processing techniques therefore enables a radar system to perform faster and more accurate airborne processing than known radar ambiguity solutions. While the invention has been described in terms of various specific embodiments, those skilled in the art will recognize that the invention can be practiced with modification within the scope of the claims.
Claims (5)
- A radar signal processing circuit (200) mounted on an aircraft comprising:a digital processing section (300), wherein for each of a left radar channel, a right radar channel, and an ambiguous radar channel, the digital processing section includes:a radar gate correlation circuit (302) configured to sample radar return data at a sampling rate;a correlation band pass filter (304) configured to stretch the sampled radar return data to a continuous wave (CW) signal;a mixer (306) configured to down sample an in-phase component and a quadrature component of the CW signal to a Doppler frequency;a band pass filter (308) centered on the Doppler frequency;a phase processor (230) configured to receive processed radar return data from said digital processing section, said phase processor further configured to determine a phase difference between radar return data from an ambiguous channel (226) and a left channel (224), and a phase difference between radar return data from the right channel and the left channel; andcharacterised by said phase processor being further configured to determine a phase difference between radar return data from a right channel (228) and the ambiguous channel; and further characterised by a processing unit (232) configured to receive the three phase differences, adjust a phase bias (570, 572, 574) for the three phase differences, resolve phase ambiguities (576) between the three phase differences to provide a signal, and filtering the signal (578) to provide a physical angle to a target in aircraft body coordinates, wherein said processing unit (232) is configured to resolve phase ambiguities by determining a plurality of physical angle solutions for each received phase difference based on the separation between antennas associated with the different channels and the wavelength of the radar signal, wherein roughly equivalent physical angle solutions for the different received phase differences are identified as the unambiguous physical angle solution.
- A radar signal processing circuit (200) according to Claim 1 wherein to provide a physical angle in aircraft body coordinates to a target said processing unit is configured to determine which physical angle solutions provide an unambiguous physical angle to the target.
- A radar signal processing circuit (200) according to Claim 2 wherein said processing unit (232) configured to determine an unambiguous physical angle which is an angle that provides a solution for at least one of the phase angle solutions for each received phase difference.
- A radar signal processing circuit (200) according to Claim 1 wherein said processing unit (232) is configured to determine a plurality of physical angle solutions for each received phase difference according to
Φ=sin-1(θ1/K1), where θ1, is determined as θ1=θLA, θ1=(θLA-360), and θ1=(θLA+360), K1 is [(360xSLA)/λ], where SLA is a separation between a left antenna element (202) and an ambiguous antenna element (214) in feet, λ is a wavelength of the radar signal in feet, and θLA is a received electrical phase angle difference between a left radar channel (224) and an ambiguous radar channel (226);
Φ=sin-1(θ1/K2), where θ1, is determined as θ1=θAR, θ1=(θAR-720), θ1=(θAR-360), θ1=(θAR+360), and θ1=(θAR+720), K2 is [(360xSAR)/λ], where SAR is a separation between an ambiguous antenna element and a right antenna element (208) in feet, λ is a wavelength of the radar signal in feet, and θAR is a received electrical phase angle difference between an ambiguous radar channel and a right radar channel (228); and
Φ=sin-1(θ1/K3), where θ1, is determined as θ1=θLR, θ1=(θLR-1080), θ1=(θLR-720), θ1=(θLR-360), θ1=(θLR+360), θ1=(θLR+720), and θ1=(θLR+1080), K3 is [(360xSLR)/λ], where SLR is a separation between a left antenna element and a right antenna element in feet, λ is a wavelength of the radar signal in feet, and θLR is a received electrical phase angle difference between a left radar channel and a right radar channel. - A radar signal processing circuit (200) according to Claim 4 wherein said processing unit (232) is configured to an SLA of about 8.891 cm, an SAR of about 21.59 cm, an SLR of about 30.48 cm, and λ of about 6.983 cm.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/144,873 US6856279B2 (en) | 2002-05-13 | 2002-05-13 | Methods and apparatus for determining an interferometric angle to a target in body coordinates |
| US144873 | 2002-05-13 | ||
| PCT/US2003/015933 WO2003096060A1 (en) | 2002-05-13 | 2003-05-13 | Determining an angle to a target using interferometry |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1504281A1 EP1504281A1 (en) | 2005-02-09 |
| EP1504281B1 true EP1504281B1 (en) | 2016-10-05 |
Family
ID=29400394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP03731280.8A Expired - Lifetime EP1504281B1 (en) | 2002-05-13 | 2003-05-13 | Determining an angle to a target using interferometry |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6856279B2 (en) |
| EP (1) | EP1504281B1 (en) |
| JP (2) | JP5204367B2 (en) |
| AU (1) | AU2003241539A1 (en) |
| CA (1) | CA2485699C (en) |
| WO (1) | WO2003096060A1 (en) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7684598B2 (en) * | 2004-07-16 | 2010-03-23 | Siemens Aktiengesellschaft | Method and apparatus for the loading and postprocessing of digital three-dimensional data |
| JP4496954B2 (en) * | 2004-12-24 | 2010-07-07 | 日本電気株式会社 | Interferometric radar |
| US7295150B2 (en) * | 2005-09-28 | 2007-11-13 | Honeywell International Inc. | Methods and systems for identifying high-quality phase angle measurements in an interferometric radar system |
| US7417586B2 (en) * | 2006-02-07 | 2008-08-26 | Honeywell International Inc. | Methods and systems for interferometric cross track phase calibration |
| US7629922B2 (en) * | 2007-09-28 | 2009-12-08 | Honeywell International Inc. | Method and system for obtaining in-phase and quadrature components of a signal |
| JP2009098097A (en) * | 2007-10-19 | 2009-05-07 | Nireco Corp | Distance measuring device and distance measuring method |
| US7688253B2 (en) | 2008-07-09 | 2010-03-30 | Honeywell International Inc. | Method and processor for reduced ambiguity resolution matrix for interferometric angle determination |
| US20100014066A1 (en) * | 2008-07-16 | 2010-01-21 | Honeywell International Inc. | Winds aloft profiling system |
| US8477063B2 (en) * | 2008-10-03 | 2013-07-02 | Honeywell International Inc. | System and method for obstacle detection and warning |
| US7898462B2 (en) * | 2008-10-03 | 2011-03-01 | Honeywell International Inc. | Multi-sector radar sensor |
| US7868817B2 (en) * | 2008-10-03 | 2011-01-11 | Honeywell International Inc. | Radar system for obstacle avoidance |
| RU2475772C1 (en) * | 2011-10-10 | 2013-02-20 | Открытое акционерное общество "Научно-производственное предприятие "Радар ммс" | Device for automatic range track on target |
| US9151826B2 (en) * | 2012-06-08 | 2015-10-06 | Symbol Technologies, Llc | Locationing via phase difference correlation between two frequency pulses derived from a single frequency emitter ultrasonic burst |
| BR112014033119B1 (en) * | 2012-07-03 | 2022-06-21 | Saab Ab | Method for determining a direction to a land-based signal-emitting object via a platform and platform |
| JP6016529B2 (en) * | 2012-08-27 | 2016-10-26 | 三菱電機株式会社 | Synthetic aperture radar equipment |
| US9939522B2 (en) * | 2013-10-13 | 2018-04-10 | Oculii Corp | Systems and methods for 4-dimensional radar tracking |
| JP2018503812A (en) * | 2014-12-19 | 2018-02-08 | レオナルド・エムダブリュ・リミテッドLeonardo MW Ltd | Digital phase meter and phase detection method |
| JP6572618B2 (en) * | 2015-05-08 | 2019-09-11 | 富士通株式会社 | Information processing device, information processing program, information processing method, terminal device, setting method, setting program |
| US10424203B2 (en) * | 2016-01-29 | 2019-09-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for driving hazard estimation using vehicle-to-vehicle communication |
| US10473775B2 (en) | 2017-03-20 | 2019-11-12 | David Slemp | Frequency modulated continuous wave antenna system |
| CN113341390B (en) * | 2021-05-25 | 2022-06-03 | 电子科技大学 | Wide-range linear frequency modulation continuous wave radar angle measurement method |
Family Cites Families (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3728727A (en) * | 1970-03-13 | 1973-04-17 | United Aircraft Corp | Phase interferometer radar |
| US4553221A (en) * | 1970-12-28 | 1985-11-12 | Hyatt Gilbert P | Digital filtering system |
| US3735400A (en) * | 1971-11-23 | 1973-05-22 | Us Air Force | Amti radar clutter cancelling method and apparatus |
| US6114984A (en) * | 1975-12-19 | 2000-09-05 | Northrop Grumman Corporation | Interferometric doppler guidance system |
| GB1540418A (en) * | 1976-03-15 | 1979-02-14 | Mullard Ltd | Resolving angular ambiguity |
| US4164036A (en) * | 1977-12-07 | 1979-08-07 | Honeywell Inc. | Quadrature correlation phase reversal pulse detector |
| US4277788A (en) * | 1978-10-24 | 1981-07-07 | Saab-Scania Ab | Direction determining apparatus responsive to electromagnetic radiation |
| US4310894A (en) * | 1979-12-20 | 1982-01-12 | Honeywell Inc. | High speed ambiguity function evaluation by optical processing |
| US4328495A (en) * | 1980-04-28 | 1982-05-04 | Honeywell Inc. | Unambiguous doppler radar |
| US4825213A (en) * | 1981-05-15 | 1989-04-25 | Grumman Aerospace Corporation | Simultaneous triple aperture radar |
| US4549184A (en) * | 1981-06-09 | 1985-10-22 | Grumman Aerospace Corporation | Moving target ordnance control |
| US4454513A (en) * | 1981-07-27 | 1984-06-12 | The United States Of America As Represented By The Secretary Of The Air Force | Simulation of an electronic countermeasure technique |
| US4608566A (en) * | 1981-12-16 | 1986-08-26 | The United States Of America As Represented By The Secretary Of The Navy | Foliage-penetration surveillance radar |
| US4684950A (en) * | 1984-07-20 | 1987-08-04 | Long Maurice W | Methods of and circuits for suppressing doppler radar clutter |
| BE1012743A4 (en) * | 1986-04-23 | 2001-03-06 | Dassault Electronique Soc Comm | Interferometric receiver of electromagnetic signals. |
| US4851852A (en) * | 1987-04-20 | 1989-07-25 | Honeywell Inc. | Decorrelation tolerant coherent radar altimeter |
| US5107268A (en) * | 1990-09-20 | 1992-04-21 | Honeywell Inc. | Method of multipath track reduction in an aircraft tracking system |
| DE4037156C2 (en) * | 1990-11-22 | 1994-03-24 | Tzn Forschung & Entwicklung | Device and method for determining the radar backscatter cross sections of radar targets |
| US5150125A (en) * | 1990-12-24 | 1992-09-22 | Honeywell Inc. | High Doppler rate, high altitude capability coherent pulse Doppler radar altimeter |
| US5173706A (en) * | 1991-04-16 | 1992-12-22 | General Electric Company | Radar processor with range sidelobe reduction following doppler filtering |
| US5361072A (en) * | 1992-02-28 | 1994-11-01 | Codar Ocean Sensors, Ltd. | Gated FMCW DF radar and signal processing for range/doppler/angle determination |
| FR2693317B1 (en) * | 1992-07-03 | 1994-08-26 | Thomson Csf | Secondary radar antenna operating in S mode. |
| US5264853A (en) * | 1992-10-29 | 1993-11-23 | Honeywell Inc. | Method of reducing false tracks due to suppression pulse replies in an aircraft tracking system |
| US5309161A (en) * | 1992-12-10 | 1994-05-03 | General Electric Co. | Radar with doppler tolerant range sidelobe suppression and time domain signal processing |
| US5389931A (en) * | 1994-03-14 | 1995-02-14 | Hughes Aircraft Company | Radar signal processing system |
| US5477226A (en) * | 1994-05-09 | 1995-12-19 | Honeywell Inc. | Low cost radar altimeter with accuracy enhancement |
| US5485157A (en) * | 1994-10-11 | 1996-01-16 | Long; Maurice W. | Doppler radar detection system |
| US5589833A (en) * | 1995-04-21 | 1996-12-31 | University Corporation For Atmospheric Research | Radar acquisition system |
| DE69606804T2 (en) * | 1995-06-20 | 2000-06-15 | Honeywell Inc | Integrated system for basic collision avoidance |
| FR2740284B1 (en) * | 1995-10-19 | 1997-11-21 | Alcatel Espace | BROADBAND DIGITAL FILTERING METHOD AND FILTER IMPLEMENTING THE METHOD |
| DE19543813A1 (en) * | 1995-11-24 | 1997-05-28 | Bosch Gmbh Robert | Radar system, in particular motor vehicle radar system |
| JPH09230039A (en) * | 1996-02-27 | 1997-09-05 | Mitsubishi Electric Corp | Interference synthetic aperture radar equipment and terrain height measuring method using the synthetic aperture radar equipment |
| DE69723483T2 (en) * | 1996-05-14 | 2004-06-03 | Honeywell International Inc. | Autonomous landing system |
| US6011505A (en) * | 1996-07-11 | 2000-01-04 | Science Applications International Corporation | Terrain elevation measurement by interferometric synthetic aperture radar (IFSAR) |
| US5767802A (en) * | 1997-01-10 | 1998-06-16 | Northrop Grumman Corporation | IFF system including a low radar cross-section synthetic aperture radar (SAR) |
| US6148195A (en) * | 1997-02-18 | 2000-11-14 | Itt Manufacturing Enterprises, Inc. | Phase agile antenna for use in position determination |
| CA2239681C (en) * | 1997-06-10 | 2007-08-21 | Xinping Huang | In-phase and quadrature signal regeneration |
| US5867119A (en) * | 1997-10-02 | 1999-02-02 | Mcdonnell Douglas Corporation | Precision height measuring device |
| US5969667A (en) * | 1997-10-16 | 1999-10-19 | Automotive Systems Laboratory, Inc. | Radar system |
| KR100248065B1 (en) * | 1997-12-30 | 2000-03-15 | 윤종용 | Digital signal processing device and method |
| US5936575A (en) * | 1998-02-13 | 1999-08-10 | Science And Applied Technology, Inc. | Apparatus and method for determining angles-of-arrival and polarization of incoming RF signals |
| US6069581A (en) * | 1998-02-20 | 2000-05-30 | Amerigon | High performance vehicle radar system |
| US6233522B1 (en) * | 1998-07-06 | 2001-05-15 | Alliedsignal Inc. | Aircraft position validation using radar and digital terrain elevation database |
| US6025800A (en) * | 1998-10-02 | 2000-02-15 | Honeywell Inc. | Interferomeric synthetic aperture radar altimeter |
| JP2000230974A (en) * | 1999-02-09 | 2000-08-22 | Toyota Motor Corp | Radar apparatus |
| JP3427790B2 (en) * | 1999-08-02 | 2003-07-22 | 日本電気株式会社 | Farfield monitor device |
| US6297764B1 (en) * | 1999-12-13 | 2001-10-02 | Harris Corporation | Radar receiver having matched filter processing |
| US6362776B1 (en) * | 2000-02-04 | 2002-03-26 | Honeywell International Inc. | Precision radar altimeter with terrain feature coordinate location capability |
| DE10012411B4 (en) * | 2000-03-13 | 2005-10-20 | Eads Deutschland Gmbh | Real-time STAP filter for fixed target suppression |
| US6362775B1 (en) * | 2000-04-25 | 2002-03-26 | Mcdonnell Douglas Corporation | Precision all-weather target location system |
| US6377214B1 (en) * | 2000-08-04 | 2002-04-23 | Trw Inc. | Pipelined processing algorithm for interferometer angle of arrival estimation |
| US6680691B2 (en) * | 2002-05-13 | 2004-01-20 | Honeywell International Inc. | Methods and apparatus for accurate phase detection |
-
2002
- 2002-05-13 US US10/144,873 patent/US6856279B2/en not_active Expired - Lifetime
-
2003
- 2003-05-13 CA CA2485699A patent/CA2485699C/en not_active Expired - Fee Related
- 2003-05-13 WO PCT/US2003/015933 patent/WO2003096060A1/en active Application Filing
- 2003-05-13 JP JP2004503997A patent/JP5204367B2/en not_active Expired - Fee Related
- 2003-05-13 AU AU2003241539A patent/AU2003241539A1/en not_active Abandoned
- 2003-05-13 EP EP03731280.8A patent/EP1504281B1/en not_active Expired - Lifetime
-
2011
- 2011-05-12 JP JP2011107529A patent/JP2011149962A/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| CA2485699A1 (en) | 2003-11-20 |
| JP5204367B2 (en) | 2013-06-05 |
| AU2003241539A1 (en) | 2003-11-11 |
| JP2011149962A (en) | 2011-08-04 |
| US6856279B2 (en) | 2005-02-15 |
| JP2005525559A (en) | 2005-08-25 |
| CA2485699C (en) | 2012-02-21 |
| WO2003096060A1 (en) | 2003-11-20 |
| EP1504281A1 (en) | 2005-02-09 |
| US20030210177A1 (en) | 2003-11-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6897804B1 (en) | Methods and apparatus for determination of a filter center frequency | |
| EP1504281B1 (en) | Determining an angle to a target using interferometry | |
| EP1509784B1 (en) | Methods and apparatus for accurate phase detection | |
| EP1504288B1 (en) | Methods and apparatus for radar data processing with filter having reduced number of computations | |
| EP1509783B1 (en) | Methods and apparatus for conversion of radar return data | |
| EP1631839B1 (en) | Methods and apparatus for weighting radar return data | |
| US20030210176A1 (en) | Methods and apparatus for resolution of radar range ambiguities | |
| US6639545B1 (en) | Methods and apparatus to determine a target location in body coordinates |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20041110 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: BURLET, TODD, R. Inventor name: HAGER, JAMES, R. Inventor name: JORDAN, LAVELL |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RBV | Designated contracting states (corrected) |
Designated state(s): DE FR GB IT SE |
|
| 17Q | First examination report despatched |
Effective date: 20100420 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: HONEYWELL INTERNATIONAL INC. |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160601 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT SE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 60349460 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 60349460 Country of ref document: DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20170426 Year of fee payment: 15 Ref country code: DE Payment date: 20170531 Year of fee payment: 15 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20170515 Year of fee payment: 15 Ref country code: SE Payment date: 20170508 Year of fee payment: 15 |
|
| 26N | No opposition filed |
Effective date: 20170706 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 60349460 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180513 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180513 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181201 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180513 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20220526 Year of fee payment: 20 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230525 |