CN211996366U - 一种全自动双工位套袋封口包装机 - Google Patents
一种全自动双工位套袋封口包装机 Download PDFInfo
- Publication number
- CN211996366U CN211996366U CN202020199764.9U CN202020199764U CN211996366U CN 211996366 U CN211996366 U CN 211996366U CN 202020199764 U CN202020199764 U CN 202020199764U CN 211996366 U CN211996366 U CN 211996366U
- Authority
- CN
- China
- Prior art keywords
- bag
- sealing
- pushing
- plate
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Abstract
本实用新型公开了一种全自动双工位套袋封口包装机,包括主体机架、来料物流线机构、推料机构、分料压料机构、撑袋口机构、封口切膜机构、套袋前后机构、储袋机构、取袋平移机构、接料推出机构、出料物流线机构;沿着所述来料物流线机构的移动方向依次设有推料机构、分料压料机构、撑袋口机构、封口切膜机构、套袋前后机构和出料物流线机构;所述储袋机构、取袋平移机构、接料推出机构对称设于所述出料物流线机构两侧。本实用新型本实用新型采用双工位处理物料,并结合烫封切膜、自动套袋功能于一体,解决了包装动作多、各个工位之间行程较长、设备占地面积大、物料容易倒料、生产过程中需要多人工套袋和人工烫封的问题,加快了生产速度,提高了产品产量。
Description
技术领域
本实用新型涉及包装机技术领域,特别涉及一种全自动双工位套袋封口包装机。
背景技术
预制袋包装是使用已制好的包装袋对产品进行包装,广泛运用纸品、卫生用品、食品、药品等产品包装,涉及行业广,包装产品多样。
现有预制袋包装机需要人工对物料进行排列,再由人工将预制袋套入设备、按下启动按钮,设备对物料进行套装及烫封工作。这种包装方式存在的缺陷,具体如下:
1、通过人手操作且每次只能取放一个产品,生产效率过低,且消耗体力,又不安全;长期高频率单调动作,也易使工人得职业病;由于人工成本较高,无法提高产能,产品质量不佳;
2、整个设备推料行程长、占用面积大、物料容易倒料、物料及预制袋破袋、包装工序较多、包装效率低等问题。
发明内容
本实用新型提供了一种自动化程度高、工序简单、包装效果好、各个工序之间行程短、物料不易倾倒且综合性能优越的全自动双工位套袋封口包装机,以解决现有通过人手操作且每次只能取放一个产品,生产效率过低,且消耗体力,又不安全;长期高频率单调动作,也易使工人得职业病;由于人工成本较高,无法提高产能,产品质量不佳;整个设备推料行程长、占用面积大、物料容易倒料、物料及预制袋破袋、包装工序较多、包装效率低等问题等技术问题。
为解决上述所述的技术问题,本实用新型提供以下技术方案:一种全自动双工位套袋封口包装机,包括主体机架,该全自动双工位套袋封口包装机还包括:
来料物流线机构,设于所述主体机架上,用于承接外接生产设备输送过来的物料后整理,并将其有序的输送至主体机架上;
推料机构,设于所述来料物流线机构一端,用于将所述来料物流线机构输送过来的物料进行左右来回往复推送,并整理压实物料;
分料压料机构,设有两个且对称设于所述来料物流线机构两侧,用于将所述推料机构推送过来的物料推入预制袋中,完成物料装袋;
撑袋口机构,对称设于所述主体机架上,用于将预制袋袋口撑开,方便于将物料的推入预制袋中;
封口切膜机构,对称设于所述撑袋口机构后侧,用于对装好物料的预制袋进行折角后热封和切断多余尾料;
套袋前后机构,对称设于所述主体机架上,且能将预制袋来回往复运输,用于抓取起预制袋并将其套入所述撑袋口机构上;
储袋机构,对称设于所述主体机架两侧,用于存放预制袋,并将预制袋有底部向上运输;
取袋平移机构,对称设于所述储袋机构上方,用于将储袋机构上的预制袋搬运至所述套袋前后机构上;
接料推出机构,对称设于所述储袋机构与所述封口切膜机构之间,用于将包装好的产品推出;及
出料物流线机构,居中设于相邻所述接料推出机构之间,用于将包装好的物料输送出包装机;
其中:工作时所述推料机构将所述来料物流线机构输送过来的物料进行左右间歇分料,同时所述套袋前后机构将预制袋套入撑袋口机构上,通过撑袋口机构将预制袋撑开,接着所述分料压料机构将其推入至撑开的预制袋中完成装料,最后所述封口切膜机构对包装好的物料进行预制袋封口并将多余尾料切除,之后再通过接料推出机构将其推入出料物流线机构中完成整个包装。
通过采用上述技术方案,本实用新型通过设有推料机构对物流线上物料进行分道,双工位分道包装产品,有效提高生产效率,产量可达2400包/每小时;设有封口切膜机构及套袋前后机构,完成自动套袋及自动封口切膜工序,替代人工套袋,降低人工成本;另外撑袋口机构和封口切膜机构相互平行设置且均采用垂直安装可有效的减少设备占地面积。
优选地,所述推料机构包括一推料支架,用于将其它元件支撑在主体机架上;
一压料动板机构,对称设于所述推料支架上,用于对来料进行压实,防止物料因蓬松而影响包装;
一分料到位机构,对称且可活动的旋接在所述推料支架上,用于对来料一侧进行整理固定;
一第一动力源,设于所述推料支架上,用于提供动力输入;及
一分料动板机构,可滑动设于推料支架上,所述第一动力源可驱动分料动板机构来回往复移动。
特别地,所述分料动板机构包括用于提供垂直升降移动的驱动气缸,所述驱动气缸的输出端设有压板,所述压板上设有防护件;所述驱动气缸一侧固定设有驱动气缸安装架,所述驱动气缸安装架旋接有波纹手轮,用于调节驱动气缸的高度。
特别地,所述分料到位机构包括侧挡板、导轴和第二波纹手轮;所述第二波纹手轮的末端与所述侧挡板固定连接;所述导轴对称设于所述第二波纹手轮两侧,且一端与侧挡板固定连接。
优选地,所述撑袋口机构包括撑袋口固定板,所述撑袋口固定板上设有第二通孔,所述第二通孔上设有凹槽;
上撑开机构,设于所述凹槽上,所述上撑开机构包括动力源固定板、第三动力源和撑袋口上撑板,所述第三动力源设于所述动力源固定板上,所述撑袋口上撑板设于所述第三动力源的输出端;及
上撑开机构,设于所述撑袋口固定板上,所述上撑开机构包括第四动力源和撑袋口下撑板,所述第四动力源固定设于撑袋口固定板上;所述撑袋口下撑板固定设于所述第四动力源的输出端;
其中:所述撑袋口下撑板与所述撑袋口上撑板移动方向相反。
优选地,所述封口切膜机构包括封口固定板,所述封口固定板设有一通孔;
第二动力源,对称设于所述封口固定板上,用于提供动力输入;
热封裁切部件,可滑动设置在所述封口固定板上,所述第二动力源可驱动热封裁切部件移动;及
插角机构,对称设于所述封口固定板上,用于对预制袋进行折角后热封。
优选地,所述套袋前后机构包括套袋固定机构、套袋滑轨、套袋动板机构、套袋动板动力源、上吸开口机构和下吸开口机构;所述套袋固定机构设于所述主体机架上;所述套袋滑轨固定于所述套袋固定机构上;所述套袋动板机构可滑动设于所述套袋滑轨上;所述套袋动板动力源设置于所述套袋固定机构上,所述套袋动板动力源可驱动所述套袋动板机构移动;所述上吸开口机构设置于所述套袋动板机构上,所述下吸开口机构设于所述主体机架内侧;所述上吸开口机构包括上吸开口固定板、上吸吸腔、上吸推出机构和上吸打开机构;上吸开口固定板与所述套袋动板机构之间通过紧固件连接,上吸吸腔设于所述上吸开口固定板下方,上吸推出机构固定于上吸开口固定板上,上吸打开机构设于上吸开口固定板上方并与上吸推出机构连接。
优选地,所述来料物流线机构和出料物流线机构均采用输送机;所述来料物流线机构上对称设有可调护栏用于防止物料输送时发生翻转。
优选地,所述储袋机构包括储袋上固定机构、储袋下固定机构、储袋滑轨固定板、储袋滑轨、储袋动板、储袋支架板和储袋板;储袋上固定机构与主体机架固定连接,储袋下固定机构与主体机架固定连接,储袋滑轨固定板上下连接储袋上固定机构和储袋下固定机构,储袋滑轨与储袋滑轨固定板侧面锁紧固定,储袋动板连接固定于储袋滑轨上,储袋板连接储袋支架板上,并锁紧固定在储袋动板上。
优选地,所述取袋平移机构包括取袋前滑轨机构、取袋后滑轨机构、取袋滑轨连接机构、储袋上下气缸、取袋前后气缸、取袋气缸前后固定块、取袋上下连接块、取袋调节机构和取袋吸盘;取袋前滑轨机构连接于储袋上固定机构,取袋后滑轨机构锁紧固定主体机架上,取袋滑轨连接机构前后连接取袋前滑轨机构和取袋后滑轨机构,取袋上下气缸设于取袋滑轨连接机构上,取袋上下连接块与取袋上下气缸连接,取袋调节机构与取袋上下连接块相连,取袋吸盘固定于取袋调节机构,取袋气缸前后固定块固定于主体机架上,取袋前后气缸连接取袋气缸前后固定块并和取袋滑轨连接机构连接。
本实用新型与现有技术相比,本实用新型具有以下优点:
1)本实用新型通过来料物流线机构实现物料的输送,也就是说,来料物流线机构可以实现将待夹持工位处的物料夹持输送至下一工位处,本实用新型通过来料物流线机构的设置改变了现有技术中在同一工位处进行理料和送料的方式,在本实用新型中物料在移动过程中自动进行物料的排列和整理,然后在通过差速输送机将物料夹持输送至末端,解决了现有技术中单一工位处工序复杂、动作较多的问题,提高包装效率。同时,来料物流线机构对物料进行输送时,由于来料物流线机构上设有可调护栏进行防护,也就说明在输送的过程中物料是处于被防护维持状态,不会造成物料倒料的情况,整个输送过程中物料平整,提高生产效率。
2)本实用新型通过在来料物流线机构末端设置推料机构,推料机构可沿着来料物流线机构运输垂直方向上作来回左右往复运动的,本实用新型的推料机构对物料进间歇性左右推移,实现为双工位的物料输送,在输送至一侧时候,物料被夹持整理以及垂直方向压实,保证物料的平整和规整的同时减小占用空间方便后续包装,可以有效地提高包装效率。
3)本实用新型的推料机构将来料物流线机构上的物料推送输送至待左右两侧,也就是说,本实用新型通过推料机构将推送至左右两侧工位上,具体由来料物流线机输送过来的物料在推料机构输送至右侧工位进行整理压实,此时来料物流线机继续输送下一个物料,待物料到位后推料机构立即反向工作,将下一个物料推送至左侧进行整理压实,在进行左侧推料的同时,右侧工位继续下一步包装动作,为下一次来料装备,如此重复动作,可以有效地提高包装效率。
4)本实用新型的撑袋口机构设置在封口切膜机构前方,用于张开由套袋前后机构输送过来的预制袋,物料要经过撑袋口机构进入到张开的预制袋内,如此就可以有效的缩短物料被推送的距离,且在撑袋口机构的保护下,可以有效地避免物料进入预制袋时对预制袋的损坏。
5)撑袋口机构在气缸作用下上下来回做往复运动,当套袋前后机构抓取预制袋向撑袋口机构移动时,撑袋口机构处于关闭状态,预制袋到达位置后,撑袋口机构正好伸入到预制袋中,然后撑袋口机构打开,撑袋预制袋上下两侧袋口,物料就被分料压料机构推动,并沿着撑袋口机构形成相向运动将其推入预制袋中,其中撑袋口机构与封口切膜机构相互平行,且垂直安装在主体机架上进一步缩短物料被推送的行程,进一步可以缩短物料进入预制袋的行程,减少了开袋工序的负责程度,也可以有效地提高包装效率。
6)与现有技术相比,本实用新型通沿着所述来料物流线机构的移动方向依次设有推料机构、分料压料机构、撑袋口机构、封口切膜机构、套袋前后机构、出料物流线机构、储袋机构、取袋平移机构和接料推出机出,其中,储袋机构、取袋平移机构、出料物流线机构、分料压料机构、撑袋口机构、封口切膜机构均采用对称设置,实现一台设备双工位生产,提高生产效率,并且如此设置可以缩短推料机构的行程,从而可以缩短推料机构机架的长度,缩小整机设备的占地面积;提高了包装效率。
8)本实用新型采用不同的转速设计可实现对来料进行快速有序的整理,保证后续工作井然有序的进行,另外通过第一输送机、第二输送机以可调护栏的设置改变了现有技术中在同一工位采用人工处进行理料和送料的作业方式,巧妙的将理料和送料两个动作在同一个工位上进行完成,可以有效地解决现有技术中单一工位处工序复杂、动作较多的问题,提高包装效率,同时通过可调护栏可以有效防止物料在推送过程中的倒料,进一步提高包装效率。
9)本实用新型来料物流线机构和撑袋口机构均采用圆弧过度设计,使物料移动更加顺畅,进而提高物料的输送效率,提高包装效率。
10)本实用新型采用可调设置使得整个设备可以适用于不同型号的产品包装,尤其在生产不同型号的产品时效果更加显著,例如包装软抽纸、扁卷纸、擦手纸、块状食品、药品、卷筒纸、散装食品等均可适用,适用范围广。
综上所述,本实用新型通过推料机构对物流线上物料进行分道,双工位分道包装产品,有效提高生产效率,产量可达2400包/每小时;设有烫封切膜机构及套袋前后机构,完成自动套袋及自动封口切膜工序,替代人工套袋,降低人工成本,同时有可以有效的解决了包装动作多、各个工位之间行程较长、设备占地面积大、物料容易倒料、生产过程中需要多人工套袋和人工烫封的问题,加快了生产速度,提高了产品产量。
附图说明
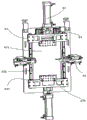
图1为本实用新型实施例三维示意图;
图2为本实用新型实施例爆照图;
图3为本实用新型实施例来料物流线机构结构示意图;
图4为本实用新型实施例推料机构结构示意图;
图5为本实用新型实施例分料压料机构结构示意图;
图6为本实用新型实施例撑袋口机构结构示意图;
图7为本实用新型实施例封口切膜机构结构示意图;
图8为本实用新型实施例热封裁切部件结构示意图;
图9为本实用新型实施例插角机构结构示意图;
图10为本实用新型实施例套袋前后机构结构示意图;
图11为本实用新型实施例上吸开口机构结构示意图;
图12为本实用新型实施例下吸开口机构结构示意图;
图13为本实用新型实施例储袋机构结构示意图;
图14为本实用新型实施例取袋平移机构结构示意图;
图15为本实用新型实施例接料推出机构结构示意图;
图16为本实用新型实施例出料物流线机构结构示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,以便这里描述的本申请的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
现在,将参照附图更详细地描述根据本申请的示例性实施方式。然而,这些示例性实施方式可以由多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施方式。应当理解的是,提供这些实施方式是为了使得本申请的公开彻底且完整,并且将这些示例性实施方式的构思充分传达给本领域普通技术人员,在附图中,为了清楚起见,有可能扩大了层和区域的厚度,并且使用相同的附图标记表示相同的器件,因而将省略对它们的描述。
请参阅附图1至图2所示:一种全自动双工位套袋封口包装机,包括主体机架1、来料物流线机构2、至图2推料机构3、分料压料机构4、撑袋口机构5、封口切膜机构6、套袋前后机构7、储袋机构8、取袋平移机构9、接料推出机构10和出料物流线机构11。其中:来料物流线机构2,设于所述主体机架1上,用于承接物料并将其输送至主体机架1上为下一步工序准备;推料机构3,设于所述来料物流线机构2的出料末端,用于将所述来料物流线机构2输送过来的物料进行左右间歇性推送,以实现为双工位进行供料,提高包装效率;分料压料机构4,设有两个,且对称设于所述来料物流线机构2两侧,用于将推料机构3推送过来的物料推入预制袋中完成装袋;撑袋口机构5,设于所述主体机架1上,且位于分料压料机构4正后方,用于将预制袋撑开,以方便分料压料机构4将物料快速的推入将预制中;封口切膜机构6,设于所述撑袋口机构5后侧,用于对装好物料的预制袋进行折角后热封,最后在将多余尾料切断废料;套袋前后机构7,对称设于所述主体机架1上,用于将预制袋袋口张开后抓取起预制袋并将其套入所述撑袋口机构5上;储袋机构8,对称设于所述主体机架1两侧,用于存放预制袋,同时随着顶部预制袋被抓取走后在将底部的预制袋顶起;取袋平移机构9,设于所述储袋机构8上方,并能沿着水平方向来回往复移动,用于将储袋机构8上的预制袋搬运至所述套袋前后机构7上;接料推出机构10,设于所述储袋机构8与所述封口切膜机构6之间,用于为热封时为物料提供支撑,方便于热封,之后在包装好的产品推出;出料物流线机构11,居中设于接料推出机构10之间,用于将包装好的物料输送出生产线。其中:工作时所述推料机构3将所述来料物流线机构2输送过来的物料进行左右间歇分料,在分料的同时所述套袋前后机构7将预制袋套入撑袋口机构5上,通过撑袋口机构5将预制袋撑开,接着所述分料压料机构4将其推入至撑开的预制袋中完成装料,最后所述封口切膜机构6对包装好的物料进行预制袋封口并将多余尾料切除后由接料推出机构10将其推入出料物流线机构11,通过出料物流线机构11将最终产品送出。下面分别对来料物流线机构2、推料机构3、分料压料机构4、撑袋口机构5、封口切膜机构6、套袋前后机构7、储袋机构8、取袋平移机构9、接料推出机构10和出料物流线机构11进行详细说明。
如图3所示,来料物流线机构2采用输送机;具体的来料物流线机构2包括第一输送机22、第二输送机23、来料物流线支架24和可调护栏21,其中第一输送机22、第二输送机23均安装在来料物流线支架24上,且工作转速不一样,可调护栏21 设置在第一输送机上,且长度大于第一输送机22长度,用于运输物料时用于防止物料移动时发生翻转,保持物料的规整。在本实用新型中相邻可调节护栏21之间的间距可以调整,以适应不同宽度的物料,并且可调节护栏21的移动采用圆弧过可实现物料的接收范围以及加快物料的流入,另外第一输送机22与第二输送机23采用不同的转速设计可实现对来料进行快速有序的整理,保证后续工作井然有序的进行。综上所述本实施例通过来料物流线机构2的设置,具体的通过第一输送机、第二输送机以可调护栏21的设置改变了现有技术中在同一工位采用人工处进行理料和送料的作业方式,巧妙的将理料和送料两个动作在同一个工位上进行完成,可以有效地解决现有技术中单一工位处工序复杂、动作较多的问题,提高包装效率。
如图4所示,推料机构3包括推料支架31、压料动板机构35、分料到位机构33、第一动力源34和分料动板机构32。其中:压料动板机构35,对称设于所述推料支架31上,用于对来料进行压实防止蓬松,以方便后续能快速将物料推入预制袋中;分料到位机构33,可活动的旋接在所述推料支架31上,用于对物料一侧进行固定整理,保持物料的规整;第一动力源34,设于所述推料支架31上,其中第一动力源34可为气缸、电机或油缸等,用于提供动力输入,本实施例中采购步进电机设置,且步进电机的输出端连接有同步带传动装置,用于将步进电机的转动变成水平移动;分料动板机构32,可滑动设于推料支架31上,所述第一动力源34可驱动分料动板机构32来回往复移动。动作时第一动力源34动作,可带动分料动板机构32在推料支架31下方向左或向右移动,分料动板机构32再与压料动板机构35相配合压实物料。具体的,推料支架31的下方设有推料滑轨滑块装置351,滑轨滑块装置351一边与推料支架31相连接,另一边与分料动板机构32相连接,推料支架31的下方还设有同步带装置,且传送皮带与分料动板机构32之间通过紧固件连接,第一动力源34(步进电机)的输出端与同步带装置连接,第一动力源34动作,进而带动同步带装置转动,此时固定在同步带装置上的推动分料动板机构32在同步带装置作用下沿着滑轨滑块装置351进行来回往复移动移动进行左右拨料的同时与压料动板机构35配合,压实物料。
进一步地,分料动板机构32包括:分料连接架352、左侧压板353和右侧压板354;分料连接架352的顶部与滑轨滑块装置351相连接,左侧压板353和右侧压板354对称的设置在分料连接架352的左右两侧,左侧压板353和右侧压板354上方均设有方形通孔,从而可快速的调节左侧压板353、右侧压板354与分料连接架352安装位置,使得左侧压板353、右侧压板354分别与压料动板机构35配合。尤其在夹紧不同型号的产品时效果更加显著,例如包装软抽纸、扁卷纸、擦手纸、块状食品、药品、卷筒纸、散装食品等均可适用,适用范围广。
进一步地,分料动板机构32包括用于提供垂直升降移动的驱动气缸321,具体地,对应于驱动气缸321的伸缩杆的初始位置和伸出位置都设置有位置传感器(图未示),用于感知驱动气缸321的伸缩状态。所述驱动气缸321的输出端设有压板322,所述压板322上设有防护件3221;所述驱动气缸321一侧固定设有驱动气缸安装架3211,所述驱动气缸安装架3211旋接有波纹手轮3212,用于调节驱动气缸321的高度,使其可以适合于对不同高度的物料进行压合,尤其在压紧不同型号的产品时效果更加显著,例如包装软抽纸、扁卷纸、擦手纸、块状食品、药品、卷筒纸、散装食品等均可适用,适用范围广。
具体的,所述推料支架31包括左侧支撑架311,所述左侧支撑架311的侧壁设有U型卡槽312,驱动气缸安装架3211卡设在U型卡槽312内,转动波纹手轮3212,从而可调节驱动气缸安装架3211沿着U型卡槽312上下移动,进而带动调节驱动气缸321移动,如此可可快速精准的调整调节驱动气缸321的高度,避免调节驱动气缸321的垂直度发生变化,以提高物料压实质量;第一动力源34动作,驱动分料动板机构32向左,使得左侧压板353与压板322下方的物料相接触,驱动气缸321再动作,推动压板322向下移动,使得压板322作用在物料的上方,使得物料被平整的压实。
进一步地,分料到位机构33包括侧挡板331、导轴332和第二波纹手轮333;所述第二波纹手轮333的末端与所述侧挡板331固定连接;所述导轴332对称设于所述第二波纹手轮333两侧,且一端与侧挡板331固定连接。转动第二波纹手轮333,使得第二波纹手轮333的螺纹杆绕着推料支架31移动,进而推动第二波纹手轮333末端的侧挡板331移动,侧挡板331两侧的导轴332,有助于侧挡板331平稳的移动;通过调整调节侧挡板331、分料动板机构32的固定连接位置,进而可调节调节侧挡板331、分料动板机构32之间的间距,以适应不同宽度的物料的生产需求,尤其在生产不同型号的产品时效果更加显著,例如包装软抽纸、扁卷纸、擦手纸、块状食品、药品、卷筒纸、散装食品等均可适用,适用范围广。
综上采用上述技术后,本实用新型通过在来料物流线机构末端设置推料机构,推料机构可沿着来料物流线机构运输垂直方向上作来回左右往复运动的,本实用新型的推料机构对物料进间歇性左右推移,实现为双工位的物料输送,在输送至一侧时候,物料被夹持整理以及垂直方向压实,保证物料的平整和规整的同时减小占用空间方便后续包装。推料机构将来料物流线机构上的物料推送输送至待左右两侧,也就是说,本实用新型通过推料机构将推送至左右两侧工位上,具体由来料物流线机输送过来的物料在推料机构输送至右侧工位进行整理压实,此时来料物流线机继续输送下一个物料,待物料到位后推料机构立即反向工作,将下一个物料推送至左侧进行整理压实,在进行左侧推料的同时,右侧工位继续下一步包装动作,为下一次来料装备,如此重复动作,可以有效地提高包装效率。另外采用可调节设置使其在生产不同型号的产品时均可以使用,实用性强。
如图5所示,分料压料机构4包括:推料电机41、推料杆42和推料传送带43,推料电机41的输出端与推料传送带43相连接,推料传送带43与推料杆42之间通过紧固件相连接;推料电机41动作,带动推料传送带43转动,进而带动推料杆42移动,由推料杆42将推料机构3平整后的物料推入撑袋口机构5。本实用新型中推料杆42可采用可调伸缩港杆,使其可以适用于与不同型号的产品生产,同时有可以减小整个分料压料机构4的占用空间,在使用时可以有效地避免物料进入预制袋时对预制袋的损坏。
如图6所示,撑袋口机构5包括撑袋口固定板51,所述撑袋口固定板51上设有第二通孔511,所述第二通孔511上方设有凹槽512;待包装的物料可沿着第二通孔511移动,上撑开机构52套设在凹槽512内,从而方便调节上撑开机构52沿着凹槽512移动,使得撑袋口机构5可用于撑开不同型号的预制袋。上撑开机构52,可移动的设于所述凹槽512上,进一步地,所述上撑开机构52包括动力源固定板521,动力源固定板521上设有长条形孔,与之对应的凹槽512设有锁具孔位,两者数量相同,可以为多个。在包装不同产物料时,几乎可以不改动整体结构就可以使用,尤其在包装软抽纸、扁卷纸、擦手纸、块状食品、药品、卷筒纸、散装食品等时候效果更加显著;第三动力源522和撑袋口上撑板523,所述第三动力源522设于所述动力源固定板521上,第三动力源522为气缸,对应于气缸的伸缩杆的初始位置和伸出位置都设置有位置传感器(图未示),所述撑袋口上撑板523设于所述第三动力源522的输出端,其中撑袋口上撑板523采用连接板和撑开叶片设置,其中撑开叶片且可滑动设安装在连接板上,且撑开叶片一端设有第二圆弧倒角,这样相邻两撑开叶片的位置可调,使其可适应撑开不同尺寸的的预制袋,设置圆弧倒角方便将物料倒入到预制袋中。下撑开机构53,设于所述撑袋口固定板51上,所述下撑开机构53包括第四动力源531和撑袋口下撑板532,撑袋口下撑板532与所述撑袋口上撑板523结构相似,所述第四动力源531固定设于撑袋口固定板51上,第四动力源531为气缸,对应于气缸的伸缩杆的初始位置和伸出位置都设置有位置传感器(图未示);所述撑袋口下撑板532固定设于所述第四动力源531的输出端;当然,在其它的实施方式中,第三动力源522和第四动力源531还可以是电动或者各种形式的缸体或推动式动力器件。本实施中所述撑袋口下撑板532与所述撑袋口上撑板523移动方向相反,且采用上下设置,如此设置技能配合套袋前后机构7实现快速套袋的同时又利用预制袋自身的重力实现快速精准的开袋。
具体的套袋前后机构7将预制袋套入撑袋口机构5,撑袋口机构5将预制袋撑开以便于将物料推入预制袋内;撑袋口机构5撑开预制袋的过程:第三动力源522动作,带动撑袋口上撑板523向上移动,第四动力源531同时动作,带动撑袋口下撑板532向下移动,从而将套设在撑袋口上撑板523、撑袋口下撑板532间的预制袋撑开。
采用上述技术方案后,使用时,当套袋前后机构7将预制袋初步开启后输送过来是撑袋口机构5上的上撑开机构52和下撑开机构53处于闭合状态,这样方便套袋前后机构7将初步张开口的预制袋套在撑袋口机构5上,此时撑开叶片正好插入预制袋中,当套袋前后机构7套完后上撑开机构52和下撑开机构53开始反向工作,张开预制袋上下两侧完成开袋作业,另外撑袋口机构5正好设置于推料机构3的出料处,如此可以缩短物料进入预制袋的行程,将开袋工序减少,也可以有效地提高包装效率。
如图7至8所示,封口切膜机构6包括用于支撑连接主体机架1的封口固定板61,所述封口固定板61设有一通孔611,通孔611尺寸远大与物料的尺寸;
第二动力源62,对称设于所述封口固定板61上,用于提供动力输入,其中第二动力源62为气缸,具体地,对应于气缸的伸缩杆的初始位置和伸出位置都设置有位置传感器,用于感知气缸的伸缩状态,当然,在其它的实施方式中,第二动力源62还可以是电动或者各种形式的缸体或推动式动力器件;
热封裁切部件63,可滑动设置在所述封口固定板61上,所述第二动力源62可驱动热封裁切部件63移动,用于将包装好的预制袋进口进行热封成型完成最终封口;及
插角机构64,对称设于所述封口固定板61上,用于对预制袋左右进行折角处理。其中:所述插角机构64对预制袋固定后将其进行两边折角;
其中:封口固定板61左右两侧的插角机构64同时动作,对预制袋的边沿进行折角,接着第二动力源62动作,带动热封裁切部件63移动,进而使得热封裁切部件63对折边后的预制袋进行热封、裁切,形成成品。
进一步地,插角机构64包括:第一折角气缸641、连接块642、平推块643、尖锥折块644、第二折角气缸645和折压块646,第一折角气缸641与封口固定板(61)相连接,第一折角气缸641的输出端与连接块642相连接,平推块643、尖锥折块644分别与连接块642相连接,第二折角气缸645与封口固定板(61)相连接,第二折角气缸645的输出端与折压块646相连接;进行工作时,第二折角气缸645动作,推动折压块646向外移动,折压块646作用在预制袋上,接着第一折角气缸641动作,推动连接块642移动,进而使得平推块643、尖锥折块644分别作用在预制袋上;封口固定板(61)左右两侧的插角机构(64)同时动作,实现对预制袋的边沿进行折角处理。
进一步地,热封裁切部件63包括:滑块631、滑轨632、热封连接块633、热封块634、裁切气缸635、裁切块636和切刀637,滑轨632与封口固定板(61)相连接,滑块631与热封连接块633相连接,热封块634与热封连接块633相连接,裁切气缸635固定在热封连接块633上方,裁切气缸635的输出端与裁切块636相连接,切刀637与裁切块636相连接,切刀637是倾斜设置在裁切块636下方,进行裁切时,切刀637的刀刃部分先后接触预制袋的表面,使得切刀637裁切更容易,提高裁切质量;其中热封块634的下方加热电阻,加热电阻通电产生热量,可实现对预制袋进行热封。
热封裁切过程:封口固定板(61)上下两侧的第二动力源(62)同时动作,带动热封连接块633沿着滑轨632移动,使得热封块634对折角后的预制袋的边沿进行热封,紧接着裁切气缸635动作,推动裁切块636向下移动,使得切刀637的刀刃从右往左先后作用在预制袋表面,完成预制袋的封存裁切。
本实施中封口切膜机构6与撑袋口机构5平行设置,如此设置有效的可以缩短物料进入预制袋后到热封的行程,可有效的提高包装效率,同时又可以减小设备的占用空间,有可以减小分料压料机构4的长度,进一步缩小整机设备的占地面积,进而缩短了推料机构的行程,提高了包装效率。
如图10至12所示,套袋前后机构7包括套袋固定机构71、套袋滑轨72、套袋动板机构73、套袋动板动力源74(步进电机)、上吸开口机构76和下吸开口机构75;所述套袋固定机构71设于所述主体机架1上;所述套袋滑轨72固定于所述套袋固定机构71上;所述套袋动板机构73可滑动设于所述套袋滑轨72上;所述套袋动板动力源74设置于所述套袋固定机构71上,所述套袋动板动力源74可驱动所述套袋动板机构73移动;所述上吸开口机构76设置于所述套袋动板机构73上,所述下吸开口机构75设于所述主体机架1内侧;上吸开口机构76、下吸开口机构75分别吸取取袋平移机构9输送的预制袋的上方和下方,套袋动板动力源74动作时,下吸开口机构75不再吸取预制袋,套袋动板动力源74带动套袋动板机构73移动,进而带动上吸开口机构76沿着套袋滑轨72往撑袋口机构5方向移动;所述上吸开口机构76包括上吸开口固定板761、上吸吸腔762、上吸推出机构763和上吸打开机构764;上吸开口固定板761与所述套袋动板机构73之间通过紧固件连接,上吸吸腔762设于所述上吸开口固定板761下方,上吸推出机构763固定于上吸开口固定板761上,上吸打开机构764设于上吸开口固定板761上方并与上吸推出机构763连接;外接负压气体进入上吸吸腔762,作用在上吸吸腔762的通孔处,使得上吸吸腔762的下方可吸附预制袋表面;上吸推出机构763的气缸动作,可推动上吸打开机构764移动,上吸打开机构764移动到合适的位置后,上吸打开机构764动作,上吸打开机构764的气缸驱动对应的夹爪765转动,使得夹爪765夹紧固定预制袋;下吸开口机构75包括:下吸气缸751和下吸连接块752,下吸气缸751的输出端与下吸连接块752相连接,下吸连接块752的表面阵列设有透气通孔753,使得负压进入下吸连接块752内部后,透过通孔753吸附预制袋。
预制袋初步打开移动过程:取袋平移机构9从储袋机构8吸取预制袋,输送到上吸开口机构76下方,下吸开口机构75动作,下吸气缸751动作,推动下吸连接块752向上移动,进而推动预制袋上移,同时上吸开口机构76动作,上吸吸腔762产生负压吸力,吸取预制袋的上表面,下吸连接块752产生负压吸力,吸附预制袋的下表面,接着下吸气缸751反向动作,带动下吸连接块752向下移动,使得预制袋初步打开;紧接着下吸连接块752不再产生负压吸力,套袋动板动力源74动作,带动套袋动板机构73移动,进而带动上吸开口机构76沿着套袋滑轨72往撑袋口机构5方向移动,将张开的预制袋套入撑袋口机构5内。
通过采用上术技术,当预制袋输送到位后,上吸开口机构76和下吸开口机构75同时工作将预制袋上下两面进行真空吸附后在相对运动完成初步打开,接着上吸推出机构763和上吸打开机构764动作驱动夹爪765夹紧固定预制袋的上源后为移动做准备,最后下吸开口机构75断开抽气后撤销对预制袋底部的吸附,并通过套袋动板动力源74将其输送至撑袋口机构5上,如此可以有效的实现自动话套袋,且加快套袋工序,有效的解决采用人手操作,生产效率过低,且消耗体力,又不安全;长期高频率单调动作,也易使工人得职业病的问题。
如图13所示,储袋机构8包括储袋上固定机构81、储袋下固定机构82、储袋滑轨固定板83、储袋滑轨84、储袋动板85、储袋支架板86和储袋板87;储袋上固定机构81与主体机架1固定连接,储袋下固定机构82与主体机架1固定连接,储袋滑轨固定板83上下连接储袋上固定机构81和储袋下固定机构82,储袋滑轨84与储袋滑轨固定板83侧面锁紧固定,储袋动板85连接固定于储袋滑轨84上,具体的,储袋动板85可沿着储袋滑轨84上下移动,储袋板87连接储袋支架板86上,并锁紧固定在储袋动板85上。
具体的,两储袋上固定机构81之间设有传动连接板,传动连接板上设有第一皮带轮,储袋下固定机构82的前侧壁设有第二皮带轮,储袋下固定机构82的后侧壁设有传动电机,传动电机的输出端与第二相连接,第一皮带轮与第二皮带轮之间通过皮带相连接,皮带与储袋动板85相连接,从而传动电机动作,即可带动第二皮带轮转动,进而带动皮带转动,从而带动储袋动板85沿着储袋滑轨84移动;当储袋板87上方的预制袋被取走后,则传动电机会开始动作,带动储袋板87向上移动被取走的预制袋的高度,以确保取袋平移机构9每次都能够从储袋机构8处取料。
如图14所示,取袋平移机构9包括取袋前滑轨机构91、取袋后滑轨机构92、取袋滑轨连接机构93、储袋上下气缸94、取袋前后气缸95、取袋气缸前后固定块96、取袋上下连接块97、取袋调节机构98和取袋吸盘99;取袋前滑轨机构91连接于储袋上固定机构81,取袋后滑轨机构92锁紧固定主体机架1上,取袋滑轨连接机构93前后连接取袋前滑轨机构91和取袋后滑轨机构92,取袋上下气缸94设于取袋滑轨连接机构93上,取袋上下连接块97与取袋上下气缸94连接,取袋调节机构98与取袋上下连接块97相连,取袋吸盘99固定于取袋调节机构98,取袋气缸前后固定块96固定于主体机架1上,取袋前后气缸95连接取袋气缸前后固定块96并和取袋滑轨连接机构93连接。
取袋平移机构9取袋和卸袋过程:取袋前后气缸95动作,推动取袋滑轨连接机构93沿着取袋后滑轨机构92往复移动,使得取袋吸盘99从储袋机构8吸取预制袋,再将预制袋输送到套袋前后机构7处;取袋前后气缸95推动取袋调节机构98移动到储袋机构8处时,储袋上下气缸94动作,带动取袋调节机构98向下移动,使得取袋吸盘99作用在储袋机构8上,取袋吸盘99产生负压吸力,吸取预制袋;接着储袋上下气缸94反向动作,带动取袋调节机构98向上移动,取袋前后气缸95再将取袋调节机构98往套袋前后机构7方向移动,储袋上下气缸94再次动作,带动取袋调节机构98向下移动,取袋吸盘99不再产生负压吸力,从而将预制袋放置在套袋前后机构7上。
如图15所示,接料推出机构10包括:推出气缸101、托料气缸102、托料板103和限位块104,托料气缸102的输出端与托料板103相连接,托料板103上方设有限位块104;物料被推入套袋前后机构7后,托料气缸102动作,带动托料板103向上移动,使得在物料的重力作用下,物料会带动预制袋落入托料板103上方,预制袋的边沿被限位块104卡住,阻止预制袋往外移动;预制袋被热封裁切后,托料气缸102反向动作,带动托料板103向下移动,推出气缸101动作,将裁切后成品推入出料物流线机构11。
本实用新型一种全自动双工位套袋封口包装机还包括控制器12,所述控制器12设置在主体机架上,所述控制器12均与来料物流线机构2、推料机构3、分料压料机构4、撑袋口机构5、封口切膜机构6、套袋前后机构7、储袋机构8、取袋平移机构9、接料推出机构10和出料物流线机构11电连接,用于控制每个机构协同有序的工作。控制器12为现有的PLC控制器,为本领域技术人员所熟知,此处不在详细介绍。
本实用新型的操作过程:进行获取预制袋的过程:取袋平移机构9动作,从储袋机构8处获取预制袋,并将预制袋输送到套袋前后机构7,即取袋前后气缸95推动取袋调节机构98移动到储袋机构8处,储袋上下气缸94动作,带动取袋调节机构98向下移动,使得取袋吸盘99作用在储袋机构8上,取袋吸盘99吸取预制袋;接着储袋上下气缸94反向动作,带动取袋调节机构98向上移动,取袋前后气缸95再将取袋调节机构98往套袋前后机构7方向移动,储袋上下气缸94再次动作,带动取袋调节机构98向下移动,取袋吸盘99不再产生负压吸力,从而将预制袋放置在套袋前后机构7上;套袋前后机构7对预制袋进行撑开操作:下吸气缸751动作,推动下吸连接块752向上移动,进而推动预制袋上移,同时上吸开口机构76动作,上吸吸腔762产生负压吸力,吸取预制袋的上表面,下吸连接块752产生负压吸力,吸附预制袋的下表面,接着下吸气缸751反向动作,带动下吸连接块752向下移动,使得预制袋初步打开;紧接着下吸连接块752不再产生负压吸力,套袋动板动力源74动作,带动套袋动板机构73移动,进而带动上吸开口机构76沿着套袋滑轨72往撑袋口机构5方向移动,将张开的预制袋套入撑袋口机构5;撑袋口机构5将预制袋撑开,以便于物料推入,第三动力源522动作,带动撑袋口上撑板523向上移动,第四动力源531同时动作,带动撑袋口下撑板532向下移动,从而将套设在撑袋口上撑板523、撑袋口下撑板532间的预制袋撑开;物料输送过程:来料物流线机构2将物料持续的往推料机构3方向输送,推料机构3分别往左右两边推送,将物料平整压实后,分料压料机构4再将物料推入预制袋内;即第一动力源34可带动分料动板机构32向左移动,使得左侧压板353作用在物料的右侧面,使得物料的左右侧面被平整,接着驱动气缸321动作,推动压板322向下移动,使得压板322作用在物料的上方,使得物料的上表面被平整的压实;第一动力源34再反向动作可带动分料动板机构32向右移动,使得左侧压板353作用在下一物料的左侧面,对物料的左右侧面进行平整,紧接着驱动气缸321动作,推动压板322向下移动,使得压板322作用在物料的上方,使得物料的上表面被平整的压实;推料电机41动作,带动推料传送带43转动,进而带动推料杆42移动,推料杆42将推料机构3平整后的物料推入撑袋口机构5;接着封口切膜机构6动作,对预制袋进行热封裁切;第二折角气缸645动作,推动折压块646向外移动,折压块646作用在预制袋上,接着第一折角气缸641动作,推动连接块642移动,进而使得平推块643、尖锥折块644分别作用在预制袋上;封口固定板61左右两侧的插角机构64同时动作,实现对预制袋的边沿进行折角处理;封口固定板61上下两侧的第二动力源62同时动作,带动热封连接块633沿着滑轨632移动,使得热封块634对折角后的预制袋的边沿进行热封,紧接着裁切气缸635动作,推动裁切块636向下移动,使得切刀637的刀刃从右往左先后作用在预制袋表面,完成预制袋的封存裁切;推出气缸101动作,将托料板103上方的成品推入出料物流线机构11。
综上所述,本实用新型设有推料机构3对来料物流线机构1线上物料进行分道,双工位分道包装产品,有效提高生产效率;同时设有烫封切膜机构及套袋前后机构,完成自动套袋及自动封口切膜工序,替代人工套袋,降低人工成本。
最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案而非对其限制,尽管参照上述实施例对本实用新型进行了详细的说明,所属领域的普通技术人员应当理解,技术人员阅读本申请说明书后依然可以对本实用新型的具体实施方式进行修改或者等同替换,但这些修改或变更均未脱离本实用新型申请待批权利要求保护范围之内。
Claims (10)
1.一种全自动双工位套袋封口包装机,包括主体机架(1),其特征在于,该全自动双工位套袋封口包装机还包括:
来料物流线机构(2),设于所述主体机架(1)上,将承接物料并将其输送至主体机架(1)上;
推料机构(3),设于所述来料物流线机构(2)一端,用于将所述来料物流线机构(2)输送过来的物料进行左右推送;
分料压料机构(4),对称设于所述来料物流线机构(2)两侧,用于将物料推入预制袋中;
撑袋口机构(5),设于所述主体机架(1)上,用于将预制袋撑开方便于物料的推入;
封口切膜机构(6),设于所述撑袋口机构(5)后侧,用于对装好物料的预制袋进行热封和切断废料;
套袋前后机构(7),对称设于所述主体机架(1)上,用于抓取起预制袋并将其套入所述撑袋口机构(5)上;
储袋机构(8),对称设于所述主体机架(1)两侧,用于存放预制袋;
取袋平移机构(9),设于所述储袋机构(8)上方,用于将储袋机构(8)上的预制袋搬运至所述套袋前后机构(7)上;
接料推出机构(10),设于所述储袋机构(8)与所述封口切膜机构(6)之间,用于将包装好的产品推出;及
出料物流线机构(11),设于所述主体机架(1)上,用于将包装好的物料输送出生产线;
其中:工作时所述推料机构(3)将所述来料物流线机构(2)输送过来的物料进行左右间歇分料,同时所述套袋前后机构(7)将预制袋套入撑袋口机构(5)上,通过撑袋口机构(5)将预制袋撑开,接着所述分料压料机构(4)将其推入至撑开的预制袋中完成装料,最后所述封口切膜机构(6)对包装好的物料进行预制袋封口并将多余尾料切除。
2.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述推料机构(3)包括一推料支架(31);
一压料动板机构(35),对称设于所述推料支架(31)上,用于对来料进行压实防止蓬松;
一分料到位机构(33),可活动的旋接在所述推料支架(31)上,用于对来料一侧进行固定;
一第一动力源(34),设于所述推料支架(31)上,用于提供动力输入;及
一分料动板机构(32),可滑动设于推料支架(31)上,所述第一动力源(34)可驱动分料动板机构(32)来回往复移动。
3.根据权利要求2所述的一种全自动双工位套袋封口包装机,其特征在于,所述分料动板机构(32)包括用于提供垂直升降移动的驱动气缸(321),所述驱动气缸(321)的输出端设有压板(322),所述压板(322)上设有防护件(3221);所述驱动气缸(321)一侧固定设有驱动气缸安装架(3211),所述驱动气缸安装架(3211)旋接有波纹手轮(3212),用于调节驱动气缸(321)的高度。
4.根据权利要求2所述的一种全自动双工位套袋封口包装机,其特征在于,所述分料到位机构(33)包括侧挡板(331)、导轴(332)和第二波纹手轮(333);所述第二波纹手轮(333)的末端与所述侧挡板(331)固定连接;所述导轴(332)对称设于所述第二波纹手轮(333)两侧,且一端与侧挡板(331)固定连接。
5.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述撑袋口机构(5)包括撑袋口固定板(51),所述撑袋口固定板(51)上设有第二通孔(511),所述第二通孔(511)上方设有凹槽(512);
上撑开机构(52),设于所述凹槽(512)上,所述上撑开机构(52)包括动力源固定板(521)、第三动力源(522)和撑袋口上撑板(523),所述第三动力源(522)设于所述动力源固定板(521)上,所述撑袋口上撑板(523)设于所述第三动力源(522)的输出端;及
下撑开机构(53),设于所述撑袋口固定板(51)上,所述下撑开机构(53)包括第四动力源(531)和撑袋口下撑板(532),所述第四动力源(531)固定设于撑袋口固定板(51)上;所述撑袋口下撑板(532)固定设于所述第四动力源(531)的输出端;
其中:所述撑袋口下撑板(532)与所述撑袋口上撑板(523)移动方向相反。
6.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述封口切膜机构(6)包括封口固定板(61),所述封口固定板(61)设有一通孔(611);
第二动力源(62),对称设于所述封口固定板(61)上,用于提供动力输入;
热封裁切部件(63),可滑动设置在所述封口固定板(61)上,所述第二动力源(62)可驱动热封裁切部件(63)移动;及
插角机构(64),对称设于所述封口固定板(61)上,用于对预制袋进行折角后热封。
7.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述套袋前后机构(7)包括套袋固定机构(71)、套袋滑轨(72)、套袋动板机构(73)、套袋动板动力源(74)、上吸开口机构(76)和下吸开口机构(75);所述套袋固定机构(71)设于所述主体机架(1)上;所述套袋滑轨(72)固定于所述套袋固定机构(71)上;所述套袋动板机构(73)可滑动设于所述套袋滑轨(72)上;所述套袋动板动力源(74)设置于所述套袋固定机构(71)上,所述套袋动板动力源(74)可驱动所述套袋动板机构(73)移动;所述上吸开口机构(76)设置于所述套袋动板机构(73)上,所述下吸开口机构(75)设于所述主体机架(1)内侧;所述上吸开口机构(76)包括上吸开口固定板(761)、上吸吸腔(762)、上吸推出机构(763)和上吸打开机构(764);上吸开口固定板(761)与所述套袋动板机构(73)之间通过紧固件连接,上吸吸腔(762)设于所述上吸开口固定板(761)下方,上吸推出机构(763)固定于上吸开口固定板(761)上,上吸打开机构(764)设于上吸开口固定板(761)上方并与上吸推出机构(763)连接。
8.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述来料物流线机构(2)和出料物流线机构(11)均采用输送机;所述来料物流线机构(2)上对称设有可调护栏(21)用于防止物料输送时发生翻转。
9.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述储袋机构(8)包括储袋上固定机构(81)、储袋下固定机构(82)、储袋滑轨固定板(83)、储袋滑轨(84)、储袋动板(85)、储袋支架板(86)和储袋板(87);储袋上固定机构(81)与主体机架(1)固定连接,储袋下固定机构(82)与主体机架(1)固定连接,储袋滑轨固定板(83)上下连接储袋上固定机构(81)和储袋下固定机构(82),储袋滑轨(84)与储袋滑轨固定板(83)侧面锁紧固定,储袋动板(85)连接固定于储袋滑轨(84)上,储袋板(87)连接储袋支架板(86)上,并锁紧固定在储袋动板(85)上。
10.根据权利要求1所述的一种全自动双工位套袋封口包装机,其特征在于,所述取袋平移机构(9)包括取袋前滑轨机构(91)、取袋后滑轨机构(92)、取袋滑轨连接机构(93)、储袋上下气缸(94)、取袋前后气缸(95)、取袋气缸前后固定块(96)、取袋上下连接块(97)、取袋调节机构(98)和取袋吸盘(99);取袋前滑轨机构(91)连接于储袋上固定机构(81),取袋后滑轨机构(92)锁紧固定主体机架(1)上,取袋滑轨连接机构(93)前后连接取袋前滑轨机构(91)和取袋后滑轨机构(92),取袋上下气缸(94)设于取袋滑轨连接机构(93)上,取袋上下连接块(97)与取袋上下气缸(94)连接,取袋调节机构(98)与取袋上下连接块(97)相连,取袋吸盘(99)固定于取袋调节机构(98),取袋气缸前后固定块(96)固定于主体机架(1)上,取袋前后气缸(95)连接取袋气缸前后固定块(96)并和取袋滑轨连接机构(93)连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020199764.9U CN211996366U (zh) | 2020-02-24 | 2020-02-24 | 一种全自动双工位套袋封口包装机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020199764.9U CN211996366U (zh) | 2020-02-24 | 2020-02-24 | 一种全自动双工位套袋封口包装机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211996366U true CN211996366U (zh) | 2020-11-24 |
Family
ID=73420753
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202020199764.9U Active CN211996366U (zh) | 2020-02-24 | 2020-02-24 | 一种全自动双工位套袋封口包装机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211996366U (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112599279A (zh) * | 2020-12-18 | 2021-04-02 | 杭州景业智能科技股份有限公司 | 放射性物料的自动封装方法及其系统 |
| CN113148317A (zh) * | 2021-04-26 | 2021-07-23 | 周碧忠 | 包装机及包装方法 |
| CN113401434A (zh) * | 2021-05-21 | 2021-09-17 | 苏州荣速机械科技有限公司 | 一种双路包装机结构 |
| CN114261577A (zh) * | 2022-02-11 | 2022-04-01 | 深圳双十科技股份有限公司 | 一种全自动套袋包装设备及其包装方法 |
| CN114261566A (zh) * | 2022-01-07 | 2022-04-01 | 无锡市川烨精工科技有限公司 | 一种基于香肠包装的线体装置及方法 |
| CN114261553A (zh) * | 2021-12-24 | 2022-04-01 | 天津长荣科技集团股份有限公司 | 一种用于包装袋的套袋封口设备及套袋工艺 |
| CN115465535A (zh) * | 2022-08-24 | 2022-12-13 | 广州珐玛珈智能设备股份有限公司 | 一种全自动检测试剂包包装生产线 |
-
2020
- 2020-02-24 CN CN202020199764.9U patent/CN211996366U/zh active Active
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112599279A (zh) * | 2020-12-18 | 2021-04-02 | 杭州景业智能科技股份有限公司 | 放射性物料的自动封装方法及其系统 |
| CN112599279B (zh) * | 2020-12-18 | 2023-08-22 | 杭州景业智能科技股份有限公司 | 放射性物料的自动封装方法及其系统 |
| CN113148317A (zh) * | 2021-04-26 | 2021-07-23 | 周碧忠 | 包装机及包装方法 |
| CN113401434A (zh) * | 2021-05-21 | 2021-09-17 | 苏州荣速机械科技有限公司 | 一种双路包装机结构 |
| CN114261553A (zh) * | 2021-12-24 | 2022-04-01 | 天津长荣科技集团股份有限公司 | 一种用于包装袋的套袋封口设备及套袋工艺 |
| CN114261553B (zh) * | 2021-12-24 | 2024-01-19 | 天津长荣科技集团股份有限公司 | 一种用于包装袋的套袋封口设备及套袋工艺 |
| CN114261566A (zh) * | 2022-01-07 | 2022-04-01 | 无锡市川烨精工科技有限公司 | 一种基于香肠包装的线体装置及方法 |
| CN114261577A (zh) * | 2022-02-11 | 2022-04-01 | 深圳双十科技股份有限公司 | 一种全自动套袋包装设备及其包装方法 |
| CN115465535A (zh) * | 2022-08-24 | 2022-12-13 | 广州珐玛珈智能设备股份有限公司 | 一种全自动检测试剂包包装生产线 |
| CN115465535B (zh) * | 2022-08-24 | 2024-01-23 | 广州珐玛珈智能设备股份有限公司 | 一种全自动检测试剂包包装生产线 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN211996366U (zh) | 一种全自动双工位套袋封口包装机 | |
| US4078358A (en) | Bag-hanging and bag-filling machines adapted for synchronous and independent operation and method of using same | |
| CN111319823A (zh) | 一种侧推式袋中袋包装机 | |
| US10246203B2 (en) | Packaging apparatus and method for nappies or other soft, flat, folded sanitary articles | |
| CN108860854B (zh) | 罐盒全自动包装线 | |
| US5857954A (en) | Apparatus for manufacturing cross bottom sacks | |
| US3877562A (en) | Article packaging machine | |
| CN105109733B (zh) | 全自动连续拉伸真空气调包装机 | |
| CN112918774A (zh) | 一种纸业智能包装设备 | |
| CN108275310B (zh) | 医用物品包装机 | |
| US2840964A (en) | Evacuating and sealing apparatus | |
| CN210761427U (zh) | 一种自动化真空包装机 | |
| ZA200504824B (en) | Vacuum packaging machine and loading system | |
| CN211467169U (zh) | 一种手套自动脱模装袋成套设备 | |
| CN211442964U (zh) | 一种手套自动装袋机 | |
| CN113353343B (zh) | 一种叠装塑料袋装袋机及装袋方法 | |
| CN202200586U (zh) | 多功能塑料袋加工机 | |
| CN216186243U (zh) | 一种热熔胶全自动二次包装装置 | |
| CN206032654U (zh) | 一种抓取系统及其被子折叠机 | |
| CN212196220U (zh) | 一种高速制袋包装机的自动折叠输送装置 | |
| CN112918802A (zh) | 一种纸巾包装用封袋机构及其纸业智能包装设备 | |
| CN107235187B (zh) | 一种轴管件制袋装袋机 | |
| CN212268050U (zh) | 一种解膜拆带系统 | |
| CN212023147U (zh) | 一种自动化管材包装机 | |
| CN211224103U (zh) | 包装装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |