CN111480547B - Device suitable for automatically planting trees on multiple terrains - Google Patents
Device suitable for automatically planting trees on multiple terrains Download PDFInfo
- Publication number
- CN111480547B CN111480547B CN202010438861.3A CN202010438861A CN111480547B CN 111480547 B CN111480547 B CN 111480547B CN 202010438861 A CN202010438861 A CN 202010438861A CN 111480547 B CN111480547 B CN 111480547B
- Authority
- CN
- China
- Prior art keywords
- tree
- frame
- seedling
- tree planting
- falls
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01G—HORTICULTURE; CULTIVATION OF VEGETABLES, FLOWERS, RICE, FRUIT, VINES, HOPS OR SEAWEED; FORESTRY; WATERING
- A01G23/00—Forestry
- A01G23/02—Transplanting, uprooting, felling or delimbing trees
- A01G23/04—Transplanting trees; Devices for grasping the root ball, e.g. stump forceps; Wrappings or packages for transporting trees
- A01G23/043—Transplanting devices for grasping, undercutting or transporting the root ball
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01C—PLANTING; SOWING; FERTILISING
- A01C5/00—Making or covering furrows or holes for sowing, planting or manuring
- A01C5/04—Machines for making or covering holes for sowing or planting
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01G—HORTICULTURE; CULTIVATION OF VEGETABLES, FLOWERS, RICE, FRUIT, VINES, HOPS OR SEAWEED; FORESTRY; WATERING
- A01G23/00—Forestry
- A01G23/02—Transplanting, uprooting, felling or delimbing trees
- A01G23/099—Auxiliary devices, e.g. felling wedges
Abstract
The invention provides a device suitable for automatic tree planting in multiple terrains, and belongs to the technical field of tree planting devices. The technical scheme is as follows: the utility model provides an applicable device in automatic tree planting of many topography, includes the frame, sets up the running member of frame bottom, sets up the drilling mechanism that digs at the frame front end, sets up the seedling part of being equipped with at the frame top, sets up on the frame, and the seedling drive assembly that is equipped with of seedling part is equipped with in the control to and set up in the frame rear end, with the output matched with of the seedling part of being equipped with plant the subassembly. The invention has the beneficial effects that: the device suitable for multi-terrain automatic tree planting provided by the invention has the advantages of high automation degree, high tree planting efficiency, high planting quality, accurate transmission, good continuity and high survival rate of saplings.
Description
Technical Field
The invention relates to the technical field of tree planting devices, in particular to a device suitable for automatic tree planting in multiple terrains.
Background
With the dramatic increase in the population of the world and various unreasonable reclamation activities in humans, an increasingly severe global desertification has been caused since the 20 th century. Desertification causes serious social and environmental problems, including reduction of arable land, frequent sand storms, reduction of annual precipitation quantity due to reduction of the capacity of the whole land for conserving water resources, and the like, and seriously deteriorates the living environment of human beings. Therefore, facing increasingly severe environmental issues, mass afforestation will be an effective way to effectively suppress desertification. The tree planting is a century-old, and has great significance for the improvement of the environment and the long-term sustainable development of human beings, the tree planting work is mainly completed manually at present, time and labor are wasted, and the work efficiency is lower, so the tree planting work is completed by using automatic mechanical equipment, the work efficiency of tree planting is improved to a great extent, the tree pit is dug by adopting a shovel and a shovel by people in the traditional pure manual tree planting operation, then the tree seedling is put into manually, one person holds the tree and covers soil, and finally watering is carried out after proper compaction. The tree digging and soil covering processes are very time-consuming and labor-consuming, the tree planting efficiency is low, and the labor intensity is high. To overcome this drawback, various tree planting devices, such as a tree planting robot, a tree planter, a tree excavator, etc., are currently on the market. For example, the Chinese patent discloses a hydraulic drilling tree planter matched with an excavator (a trencher), which comprises a drill bit and a gear box, wherein a connecting frame is arranged on the gear box, a hydraulic motor and a speed reducer are arranged on the gear box, the hydraulic motor drives a gear in the gear box through the speed reducer, and an oil pipeline of the hydraulic motor is connected with a hydraulic system of the excavator. Although the planter with the structure adopts the hydraulic motor to provide power for the drill bit serving as the excavating mechanism, the power is sufficient, and the planter can excavate complex soil layers such as hard soil layers, frozen soil layers and the like. When the automatic digging device is used, on one hand, the automatic digging device is required to be matched with a trencher for use, on the other hand, the automatic digging device only has an automatic digging function, tree seedling placing and ridging operations in the tree planting process cannot be completed on the same device, and the full automation degree is low.
How to solve the problems in the prior art described above is a problem to be faced by the present invention.
Disclosure of Invention
The invention aims to provide the device which has high automation degree, high tree planting efficiency, high planting quality, accurate transmission, good continuity and high survival rate of tree seedlings and is suitable for multi-terrain automatic tree planting.
The invention is realized by the following measures: the utility model provides an applicable device in automatic tree planting of many topography, wherein, includes the frame, sets up the running part of frame bottom sets up the drilling mechanism that digs of frame front end sets up the seedling part spare at frame top sets up on the frame, control seedling part spare is equipped with seedling drive assembly to and sets up the frame rear end, with the output matched with of seedling part plants the tree subassembly.
During the use, prepare in the spare seedling part and wait to plant the sapling, the running part drives the frame and advances the in-process, the drilling mechanism that digs that is located the frame front end digs at the assigned position and drills and forms the tree pit, the running part continues to drive the frame and advances, when the operation position of planting the subassembly of planting the tree is in coordination with tree pit department, it will be planted by the sapling of spare seedling part output to plant the subassembly of planting the tree, whole tree planting process is completed at one stroke, degree of automation is high, set up the running part, make the applicable topography that is used for the difference of device use.
The tree planting assembly is characterized by comprising a tree falling barrel with two through ends, a hilling ring sleeved outside the tree falling barrel and in sliding fit with the outer side surface of the tree falling barrel along the central line direction of the tree falling barrel, a main hydraulic rod with one end hinged to the frame and the other end hinged to the hilling ring, a plurality of hilling plates uniformly arranged along the circumferential direction of the tree falling barrel, one end respectively hinged to the outer circumferential side surface of the tree falling barrel, and a plurality of secondary hydraulic rods uniformly arranged along the circumferential direction of the tree falling barrel, one end respectively hinged to the hilling ring and the other end respectively hinged to the middle parts of the corresponding hilling plates.
During the use, when the lower port of the tree falling cylinder is just to the tree pit, the sapling passes the tree falling cylinder and falls down, main hydraulic stem drives the ring of earthing up the up-and-down motion, carry out the motion of earthing up under the drive of secondary hydraulic stem, the board of earthing up fills back the tree pit with the soil that is dug out by digging drilling mechanism around the tree pit again, accomplish and plant the tree operation, the operating efficiency is high, and the sapling is difficult for empting, guarantee to plant the quality, preferably, the vertical setting of tree falling cylinder, the sapling in-process that falls also is upright form, can guarantee that the sapling of planting is upright neat.
The seedling preparation component comprises a transmission groove fixed on the top surface of the frame, a plurality of seedling barrels moving along the transmission groove and uniformly arranged in the transmission groove, and a transmission driving component for driving the seedling barrels to move along the transmission groove;
a tree dropping hole matched with the tree dropping cylinder is formed in the bottom wall of the transmission groove right above the tree dropping cylinder;
the bottom end of the seedling barrel is provided with a through hole matched with the weight falling hole, preferably, the upper end and the lower end of the seedling barrel are both transparent, and the seedling can be conveniently supplemented in time after falling.
When the tree planting machine is used, a tree seedling with a downward root is placed in each tree seedling bucket, the plurality of tree seedling buckets are driven by the transmission driving assembly to move along the transmission grooves, when the lower port of the tree planting bucket is just opposite to the tree pit, the through hole at the bottom end of one of the tree seedling buckets is aligned to the tree falling hole, the tree seedling sequentially passes through the through hole under the action of self gravity, falls into the tree falling bucket after falling through the tree falling hole and continues to complete tree planting operation through the tree planting assembly, the tree seedling bucket moves along the transmission grooves, and the tree falling hole is matched with the tree falling bucket, so that a seedling preparing component can be guaranteed to accurately transmit the tree seedling to the planting assembly, the time interval for aligning the through hole of the tree seedling bucket and the tree falling hole can be set as required, and the tree planting operation for each time is guaranteed to have only one tree seedling matching operation.
The invention is characterized in that the transmission groove is in a runway shape, the transmission driving component comprises an inner rack ring which is arranged along the side wall of the middle part of the runway shape transmission groove in an end-to-end connection way and is in sliding fit with the transmission groove, and a first gear which is arranged in the middle part of the frame and is meshed with the inner rack ring; the plurality of seedling barrels are respectively connected with the inner rack ring; the rotating shaft of the first gear is coaxial with the output shaft of the seedling preparation driving assembly.
The rotation through first gear drives the transmission groove rotation of inner rack ring edge runway type, and then drives the sapling bucket along the transmission groove motion, and the transmission is accurate, simple structure, operates steadily.
The seedling preparation driving assembly comprises a grooved wheel, a driving plate, a grooved wheel rack and a first motor, wherein a rotating shaft of the grooved wheel is coaxial with a rotating shaft of the first gear, the driving plate is matched with the grooved wheel, the grooved wheel rack is fixed on the frame, and the first motor is arranged on the grooved wheel rack and is coaxial with an output shaft and the rotating shaft of the driving plate.
The setting is driven transmission drive assembly by driver plate, sheave of mutually supporting, can further ensure the accurate transmission of sapling bucket, can prolong the dwell time of sapling bucket when the through-hole is adjusted well with falling the tree hole simultaneously, prevents that sapling in-process sapling bucket rotation of falling from arousing that the sapling is blocked, influences the continuity of planting trees.
The seedling preparation component is characterized in that a connecting rib is arranged between every two adjacent seedling barrels, so that stable transmission and constant distance among the seedling barrels are guaranteed, the transmission accuracy is further guaranteed, and preferably, the connecting rib is made of elastic materials.
The soil digging and drilling mechanism comprises a fixed frame on the frame, a movable frame in sliding fit with the fixed frame along the vertical direction, a second motor fixed on the movable frame, a drill bit arranged on an output shaft of the second motor, a second gear with a rotating shaft coaxial with an output shaft of the third motor, and a rack fixed on the movable frame and meshed with the second gear, wherein the outer diameter of the drill bit is matched with the inner diameter of a tree dropping cylinder, so that a tree pit dug by the drill bit is matched with a tree seedling, the tree seedling is guaranteed to smoothly fall to the bottom of the tree pit in a vertical mode, and planting efficiency and planting quality are guaranteed.
Preferably, the drill bit sets up to auger type drill bit, during the use, the drill bit rotates along with the second motor, the second gear rotates along with the third motor, the rack that meshes mutually with the second gear drives movable frame and reciprocates along fixed frame, the drill bit reciprocates in rotatory promptly, it revolves soil and goes the soil belt to get into the soil layer, form the tree pit, the operating efficiency is high, and the not hard up soil of unscrewing falls into tree pit bottom, the sapling of being convenient for to plant is pricked the root and is grown, improves the sapling survival rate, auger type drill bit is prior art, no longer gives unnecessary details here.
The crawler-type walking wheel is characterized in that the walking part is a crawler-type walking wheel, preferably, a crawler of the crawler-type walking wheel is a chain-type crawler, and the crawler-type walking wheel is convenient to use on various complex terrains.
The invention has the beneficial effects that: according to the invention, the frame is provided with the soil digging and drilling mechanism, the seedling preparation component and the tree planting component, so that the whole tree planting process can be completed at one step, the automation degree is high, and the walking component is arranged, so that the device can be suitable for different terrains; the tree-falling cylinder is arranged to ensure that the root of the sapling falls downwards smoothly, the earthing ring controlled by the main hydraulic rod is sleeved outside the tree-falling cylinder, and the earthing plate driven by the secondary hydraulic rod and the earthing ring can ensure that the sapling can be immediately earthed after falling down, so that the tree-carrying operation efficiency is further improved, the sapling is not easy to topple, and the planting quality is ensured; the seedling preparing component is arranged, so that the time interval of two seedling barrels passing through the tree dropping hole can be conveniently controlled, the condition that only one seedling falls from the tree dropping hole every time is ensured, and the continuity of the device is ensured; the transmission driving component is driven by the driving plate and the grooved wheel which are matched with each other, so that the accurate transmission of the seedling barrel can be further ensured, meanwhile, the retention time of the seedling barrel when the through hole is aligned with the tree falling hole can be prolonged, and the phenomenon that the seedling is blocked due to the rotation of the seedling barrel in the falling process of the seedling is prevented, and the continuity of tree planting is influenced; the connecting ribs are arranged, so that stable transmission and unchanged space among a plurality of seedling barrels are ensured, and the transmission accuracy is further ensured; set up the drill bit that can reciprocate, make the drill bit get into the soil layer and carry out the soil soon and remove soil belt, form the tree pit, the operating efficiency is high, and not the not hard up soil of unscrewing falls into tree pit bottom, and the sapling of being convenient for to plant is pricked the root and is grown, improves sapling survival rate.
Drawings
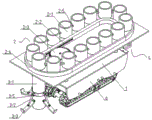
FIG. 1 is a schematic structural view of the present invention;
FIG. 2 is a front view of the present invention;
fig. 3 is a partial structural schematic diagram of the present invention.
Wherein the reference numerals are: 1. A frame; 2. a seedling preparation part; 2-1, a sapling bucket; 2-2, an inner rack ring; 2-3, a first gear; 2-4, a transmission groove; 2-5, connecting ribs; 3. planting a tree component; 3-1, falling the tree cylinder; 3-2, secondary hydraulic rod; 3-3, a hilling plate; 3-4, main hydraulic rod; 3-5, ridging; 4. preparing a seedling driving assembly; 4-1, grooved wheels, 4-2 and drive plates; 4-3, a grooved pulley frame; 5. a soil digging and drilling mechanism; 5-1, a rack; 5-2, a second gear; 5-3, a movable frame; 5-4, fixing the frame; 5-5, a drill bit; 6. crawler-type walking wheel.
Detailed Description
In order to clearly illustrate the technical features of the present solution, the present solution is explained below by way of specific embodiments.
Referring to fig. 1-3, the present invention is: the utility model provides an applicable device in automatic tree planting of many topography, wherein, includes frame 1, sets up the running member of frame 1 bottom, sets up the drilling mechanism 5 that digs earth at frame 1 front end, sets up the seedling part 2 of being equipped with at frame 1 top, sets up on frame 1, and the seedling drive assembly 4 that is equipped with of seedling part 2 is equipped with in the control to and set up in frame 1 rear end, with the output matched with of being equipped with seedling part 2 plant tree subassembly 3.
During the use, prepare in the spare seedling part 2 and wait to plant the sapling, the walking part drives frame 1 and advances the in-process, the drilling mechanism that digs 5 that is located the frame 1 front end digs at the assigned position and drills and forms the tree pit, the walking part continues to drive frame 1 and advances, when the operation position of planting subassembly 3 and the cooperation of tree pit department, it will be planted by the sapling of spare seedling part 2 output to plant subassembly 3, whole tree planting process is finished at one go, degree of automation is high, set up the walking part, make the applicable topography that is used for the difference of device use.
The tree planting assembly 3 is characterized by further comprising a tree falling barrel 3-1 with two through ends, a ridging ring 3-5 sleeved outside the tree falling barrel 3-1 and in sliding fit with the outer side surface of the tree falling barrel 3-1 along the central line direction of the tree falling barrel 3-1, a main hydraulic rod 3-4 with one end hinged to the frame 1 and the other end hinged to the ridging ring 3-5, the main hydraulic rod is uniformly arranged along the circumferential direction of the tree falling barrel 3-1, one end of the main hydraulic rod is respectively hinged to a plurality of ridging plates 3-3 on the outer circumferential side surface of the tree falling barrel 3-1, the plurality of secondary hydraulic rods 3-2 are uniformly arranged along the circumferential direction of the tree falling barrel 3-1, one end of each secondary hydraulic rod is respectively hinged to the ridging ring 3-5, and the other end of each secondary hydraulic rod is respectively hinged to the middle parts of the corresponding ridging plates 3-3.
When the tree planting machine is used, when the lower port of the tree dropping cylinder 3-1 is opposite to a tree pit, a tree seedling passes through the tree dropping cylinder 3-1 and drops, the main hydraulic rod 3-4 drives the hilling ring 3-5 to move up and down, the hilling plate 3-3 carries out hilling movement under the driving of the secondary hydraulic rod 3-4, and soil dug out of the earth digging and drilling mechanism 5 around the tree pit is filled back into the tree pit again through the hilling plate 3-3, so that tree planting operation is completed.
The seedling preparation component 2 is characterized by comprising a transmission groove 2-4 fixed on the top surface of the frame 1, a plurality of seedling barrels 2-1 which move along the transmission groove 2-4 and are uniformly arranged in the transmission groove 2-4, and a transmission driving component which drives the plurality of seedling barrels 2-1 to move along the transmission groove 2-4;
the bottom wall of the transmission groove 2-4 right above the tree dropping cylinder 3-1 is provided with a tree dropping hole matched with the tree dropping cylinder 3-1;
the bottom end of the seedling barrel 2-1 is provided with a through hole matched with the weight falling hole.
When in use, a seedling with a downward root is respectively placed in each seedling barrel 2-1, a plurality of seedling barrels 2-1 are driven by the transmission driving component to move along the transmission groove 2-4, when the lower port of the tree dropping barrel 3-1 is over against the tree pit, the through hole at the bottom end of one of the seedling barrels 2-1 is aligned with the tree dropping hole, the seedling passes through the through hole and the tree dropping hole in sequence under the action of the self gravity, falling into the tree falling barrel 3-1, and continuing to finish tree planting operation by the tree planting assembly 3, as the seedling barrel 2-1 moves along the transmission groove 2-4 and the tree dropping hole is matched with the tree dropping cylinder 3-1, can be equipped with seedling part 2 and to planting the accurate transmission sapling of tree subassembly 3, can set up the through-hole of sapling bucket 2-1 as required and fall the time interval that the tree hole was adjusted well, guarantee to plant the operation each time all have and only one sapling cooperation operation.
The invention is characterized in that the transmission groove 2-4 is designed into a runway shape, the transmission driving component comprises an inner rack ring 2-2 which is arranged along the side wall of the middle part of the runway-shaped transmission groove 2-4 in an end-to-end connection way and is in sliding fit with the transmission groove 2-4, and a first gear 2-3 which is arranged in the middle part of the frame 1 and is meshed with the inner rack ring 2-2; a plurality of sapling barrels 2-1 are respectively connected with the inner rack rings 2-2; the rotating shaft of the first gear 2-3 is coaxial with the output shaft of the seedling preparation driving component 4.
The inner rack ring 2-2 is driven to rotate along the runway-type transmission groove 2-4 by the rotation of the first gear 2-3, and then the sapling barrel 2-1 is driven to move along the transmission groove 2-4, so that the transmission is accurate, the structure is simple, and the operation is stable.
The seedling preparation driving component 4 is characterized by comprising a sheave 4-1, a driving plate 4-2, a sheave rack 4-3 and a first motor, wherein the sheave 4-1 is coaxial with the rotating shaft of the first gear 2-3, the driving plate 4-2 is matched with the sheave 4-1, the sheave rack 4-3 is fixed on the frame 1, and the first motor is arranged on the sheave rack 4-3 and is coaxial with the rotating shaft of the driving plate 4-2 and an output shaft.
The transmission driving assembly is driven by the driving plate 4-2 and the grooved pulley 4-1 which are matched with each other, so that accurate transmission of the tree seedling barrel 2-1 can be further ensured, the retention time of the tree seedling barrel 2-1 when the through hole is aligned with the tree falling hole can be prolonged, and the phenomenon that the tree seedling is blocked due to rotation of the tree seedling barrel 2-1 in the falling process of the tree seedling is prevented, and the tree planting continuity is influenced.
The seedling preparation component 2 is characterized in that a connecting rib 2-5 is arranged between every two adjacent seedling barrels 2-1, so that the stable transmission and the constant distance of the seedling barrels 2-1 are ensured, the transmission accuracy is further ensured, and preferably, the connecting rib 2-5 is made of elastic materials.
The invention is characterized in that the soil digging and drilling mechanism 5 comprises a fixed frame 5-4 on the frame 1, a movable frame 5-3 which is matched with the fixed frame 5-4 in a sliding way along the vertical direction, a second motor fixed on the movable frame 5-3, a drill bit 5-5 arranged on an output shaft of the second motor, a third motor fixed on the frame 1, a second gear 5-2 with a rotating shaft coaxial with an output shaft of the third motor, and a rack 5-1 which is fixed on the movable frame 5-3 and is meshed with the second gear 5-2.
Preferably, the drill bit 5-5 is an auger type drill bit, when in use, the drill bit 5-5 rotates along with the second motor, the second gear 5-2 rotates along with the third motor, the rack 5-1 meshed with the second gear 5-2 drives the movable rack 5-3 to move up and down along the fixed rack 5-4, namely, the drill bit 5-5 moves up and down while rotating, enters the soil layer to carry out soil rotation and take away the soil to form a tree pit, and the auger type drill bit is the prior art and is not described herein again.
The crawler-type walking wheel is characterized in that the walking part is provided with the crawler-type walking wheel 6, preferably, the crawler of the crawler-type walking wheel 6 is provided with a chain type crawler, and the crawler-type walking wheel is convenient to use on various complex terrains.
The technical features of the present invention which are not described in the above embodiments may be implemented by or using the prior art, and are not described herein again, of course, the above description is not intended to limit the present invention, and the present invention is not limited to the above examples, and variations, modifications, additions or substitutions which may be made by those skilled in the art within the spirit and scope of the present invention should also fall within the protection scope of the present invention.
Claims (7)
1. The device is suitable for automatic tree planting in multiple terrains and is characterized by comprising a frame (1), a walking part arranged at the bottom of the frame (1), an earth digging and drilling mechanism (5) arranged at the front end of the frame (1), a seedling preparing part (2) arranged at the top of the frame (1), a seedling preparing driving assembly (4) arranged on the frame (1) and used for controlling the seedling preparing part (2), and a tree planting assembly (3) arranged at the rear end of the frame (1) and matched with the output end of the seedling preparing part (2);
tree planting subassembly (3) including the both ends through the tree section of thick bamboo that falls (3-1), cup joint tree section of thick bamboo that falls (3-1) is outer, and with the lateral surface of tree section of thick bamboo that falls (3-1) is followed the center line direction sliding fit's of tree section of thick bamboo that falls (3-1) hilling ring (3-5), one end articulates on frame (1), and another tip articulates main hydraulic stem (3-4) on hilling ring (3-5), follows tree section of thick bamboo that falls (3-1) circumferencial direction evenly arranges, and one end articulates respectively a plurality of hilling board (3-3) on the outer circumferencial side of tree section of thick bamboo that falls (3-1), and follow tree section of thick bamboo that falls (3-1) circumferencial direction evenly arranges, and one end articulates respectively on hilling ring (3-5), and the other end articulates respectively corresponding a plurality of secondary hydraulic stem (3-3) at hilling board (3-3) middle part -2).
2. The device applicable to multi-terrain automatic tree planting according to claim 1, wherein the seedling preparation member (2) comprises a transfer groove (2-4) fixed on the top surface of the carriage (1), a plurality of seedling barrels (2-1) moving along the transfer groove (2-4) and uniformly arranged in the transfer groove (2-4), and a transfer driving assembly driving the plurality of seedling barrels (2-1) to move along the transfer groove (2-4);
a tree dropping hole matched with the tree dropping cylinder (3-1) is formed in the bottom wall of the transmission groove (2-4) right above the tree dropping cylinder (3-1);
the bottom end of the seedling barrel (2-1) is provided with a through hole matched with the tree falling hole.
3. The device applicable to multi-terrain automatic tree planting according to claim 2, wherein the transmission grooves (2-4) are shaped as a runway, and the transmission driving assembly comprises an inner rack ring (2-2) which is arranged end to end along the side wall of the middle part of the transmission grooves (2-4) of the runway and is in sliding fit with the transmission grooves (2-4), and a first gear (2-3) which is arranged at the middle part of the frame (1) and is meshed with the inner rack ring (2-2); the plurality of seedling barrels (2-1) are respectively connected with the inner rack ring (2-2); the rotating shaft of the first gear (2-3) is coaxial with the output shaft of the seedling preparation driving component (4).
4. The device applicable to multi-terrain automatic tree planting according to claim 3, wherein the seedling preparation driving assembly (4) comprises a sheave (4-1) with a rotating shaft coaxial with the rotating shaft of the first gear (2-3), a dial (4-2) matched with the sheave (4-1), a sheave rack (4-3) fixed on the frame (1), and a first motor arranged on the sheave rack (4-3) and with an output shaft coaxial with the rotating shaft of the dial (4-2).
5. The device suitable for multi-terrain automatic tree planting according to claim 2, characterized in that the seedling preparation part (2) further comprises a connecting rib (2-5) arranged between each two adjacent seedling barrels (2-1).
6. The device applicable to automatic multi-terrain tree planting according to any one of claims 1-5, wherein the earth-moving drilling mechanism (5) comprises a fixed frame (5-4) on the frame (1), a movable frame (5-3) slidably engaged with the fixed frame (5-4) in a vertical direction, a second motor fixed on the movable frame (5-3), a drill (5-5) provided on an output shaft of the second motor, a third motor fixed on the frame (1), a second gear (5-2) having a rotating shaft coaxial with an output shaft of the third motor, and a rack (5-1) fixed on the movable frame (5-3) and engaged with the second gear (5-2).
7. The device applicable to multi-terrain automatic tree planting according to claim 1, characterized in that the walking member is provided as a crawler-type walking wheel (6).
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010438861.3A CN111480547B (en) | 2020-05-22 | 2020-05-22 | Device suitable for automatically planting trees on multiple terrains |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010438861.3A CN111480547B (en) | 2020-05-22 | 2020-05-22 | Device suitable for automatically planting trees on multiple terrains |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111480547A CN111480547A (en) | 2020-08-04 |
| CN111480547B true CN111480547B (en) | 2022-02-08 |
Family
ID=71795412
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010438861.3A Active CN111480547B (en) | 2020-05-22 | 2020-05-22 | Device suitable for automatically planting trees on multiple terrains |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111480547B (en) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112056171B (en) * | 2020-09-21 | 2021-12-07 | 淮北悯农生物科技有限公司 | Garden seedling planting method |
| CN112586305A (en) * | 2021-01-18 | 2021-04-02 | 辽宁科技大学 | Full-automatic tree planting robot |
| CN114009303B (en) * | 2021-11-18 | 2022-11-01 | 武汉大学 | Full-automatic tree planting vehicle |
| CN114375759B (en) * | 2021-12-13 | 2023-10-24 | 六安市叶集区绿叶果木种植专业合作社 | Grape trellis with prevent wind effect |
| CN114568244B (en) * | 2022-03-10 | 2023-06-02 | 武夷学院 | Tree planting vehicle applicable to multiple terrains and application method |
| CN114586635A (en) * | 2022-03-11 | 2022-06-07 | 李思哲 | Integrated tree planting robot |
| CN114982674B (en) * | 2022-05-21 | 2023-06-27 | 四川航天职业技术学院(四川航天高级技工学校) | Automatic coral planting device and coral planting method |
| CN114830989A (en) * | 2022-06-13 | 2022-08-02 | 哈尔滨剑桥学院 | Full-automatic desert tree planting vehicle |
| CN114982583A (en) * | 2022-06-17 | 2022-09-02 | 重庆交通大学 | Digging and cultivating integrated tree planting robot |
| CN115250862B (en) * | 2022-07-27 | 2023-08-01 | 上海新园林实业有限公司 | Heavy metal polluted land reclamation restoration device and method |
| CN115316216B (en) * | 2022-08-30 | 2023-12-29 | 武汉工程大学 | Multi-sapling automatic planting robot |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES256982Y (en) * | 1981-03-18 | 1981-12-16 | TREE STARTING MACHINE, NURSERIES AND SIMILAR | |
| CN104855016A (en) * | 2015-05-19 | 2015-08-26 | 潍坊友容实业有限公司 | Fixed-distance cultivating machine for saline-alkali soil |
| CN105340437B (en) * | 2015-11-23 | 2018-10-19 | 云南烟草机械有限责任公司 | A kind of electronic rotation dig reservoir self-propelled tobacco seeds transplanter |
| CN106664911A (en) * | 2016-12-13 | 2017-05-17 | 重庆市神女药业股份有限公司 | Traditional Chinese medicine seedling transplanter |
| CN107114207B (en) * | 2017-06-19 | 2020-11-17 | 义乌市富顺箱包有限公司 | Tree planting vehicle for gardens |
| CN108739219B (en) * | 2018-04-28 | 2020-07-24 | 淮阴工学院 | Tree planting machine |
| CN108575658B (en) * | 2018-05-30 | 2020-10-16 | 马鞍山市润启新材料科技有限公司 | Excavator capable of automatically planting trees |
| CN110226486A (en) * | 2019-07-29 | 2019-09-13 | 高越 | Intelligent distant control Tree planting vehicle |
| CN212464338U (en) * | 2020-05-22 | 2021-02-05 | 中建八局第一建设有限公司 | Device suitable for automatically planting trees on multiple terrains |
-
2020
- 2020-05-22 CN CN202010438861.3A patent/CN111480547B/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN111480547A (en) | 2020-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111480547B (en) | Device suitable for automatically planting trees on multiple terrains | |
| CN108029284A (en) | Suitable for the full-automatic Machine for planting tree people of single file plantation | |
| CN207869642U (en) | Full-automatic Machine for planting tree people suitable for uniline plantation | |
| CN215683870U (en) | Wheel-leg type tree planting robot | |
| CN111972244A (en) | Tree planting robot | |
| CN114830989A (en) | Full-automatic desert tree planting vehicle | |
| CN212464338U (en) | Device suitable for automatically planting trees on multiple terrains | |
| CN210093899U (en) | Portable ground auger planting earth boring machine for drought-resistant sapling | |
| CN112400419B (en) | Seeding device capable of repairing farmland soil | |
| CN211607321U (en) | Landscape plant plants device of cutting earth | |
| CN205030092U (en) | Seeding growth transplanter | |
| CN111758350A (en) | Seedling planting equipment | |
| CN211378733U (en) | Tree planting and soil excavating device for barren killing engineering | |
| CN215872647U (en) | Vegetable blanket-shaped seedling wheel train type transplanting mechanism integrating hole digging and planting | |
| CN115530039A (en) | Mountain region tree planting robot | |
| CN112889378B (en) | Intelligent agricultural machine's chinese yam planting mechanism | |
| CN115191207A (en) | Integrated multi-functional full-automatic running gear who plants trees | |
| CN215421582U (en) | Agricultural technology is with digging hole planting device | |
| CN220570958U (en) | Greening planting equipment for environmental construction | |
| CN211671262U (en) | Sapling is planted and is used digging device | |
| CN111972080B (en) | Tea-seed oil production planting device | |
| CN219812474U (en) | Quick pit digging equipment for mountain forestation | |
| CN213280613U (en) | Afforestation is with planting tree dotter | |
| CN218789539U (en) | Full-automatic salix psammophila planting machine | |
| CN217470714U (en) | Digging and backfilling integrated desert tree planting device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |