CN102591359B - Solar tracking controller - Google Patents
Solar tracking controller Download PDFInfo
- Publication number
- CN102591359B CN102591359B CN201210042875.9A CN201210042875A CN102591359B CN 102591359 B CN102591359 B CN 102591359B CN 201210042875 A CN201210042875 A CN 201210042875A CN 102591359 B CN102591359 B CN 102591359B
- Authority
- CN
- China
- Prior art keywords
- register
- analog
- sunlight
- value
- master controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Abstract
The invention discloses a solar tracking controller. The output end of a sunlight sensor is connected with the input end of an analog to digital conversion device; the output end of the analog to digital conversion device is connected with the input end of a main controller; the output end of the main controller is connected with a driving circuit; the output end of the driving circuit is connected with a cloud platform control device; the main controller is connected with a power input interface, a press key display interface and a serial communication interface; the sunlight sensor is used for collecting the sunlight position and converting the sunlight position into an electrical signal; after the analog to digital conversion, the digital signal is sent to an Atmega32 single-chip machine, the sunlight position is calculated by using the single-chip machine, and the corresponding control signal is output; a cloud platform is controlled by the driving circuit so that the panel of the cloud platform is kept to be perpendicular to the sunlight all the way and the purpose of solar tracking is achieved; a storage cell is used for storing the electrical energy sent by a solar cell panel and supplying electric power to the whole system at night; and the press key display interface is connected with a press key debugging module and used for installing, debugging and maintaining.
Description
Technical field
The present invention relates to controller, be specifically related to a kind of solar tracking controller.
Background technology
Sun power is a kind of renewable and clean energy resource, at present, China mainly rests on the preliminary stage of application of non-motion tracking solar generating, solar cell, solar water heater to the utilization of sun power, the sun power conversion efficiency of the monocrystalline silicon battery adopting in solar power plant is only 12% left and right, the advantage of solar electrical energy generation is not embodied.
The effective way that improves solar energy generating efficiency adopts tracking mode concentrating to generate power exactly---and be equipped with solar tracking system, being equipped with solar tracking system can directly improve 92.2% by the efficiency of solar electrical energy generation; For novel solar power generation material gallium arsenide, adopt tracking and condensing power generation, solar energy generating efficiency more can be brought up to more than 36%, yet, that solar tracking system in the market exists is expensive, tracking accuracy is only the shortcomings such as 0.3 °, reliability is poor, has restricted solar tracking system popularization in actual applications.
Summary of the invention
In order to overcome the shortcoming of above-mentioned prior art, a kind of solar tracking controller is provided, in conjunction with sunlight sensor, this systematic tracking accuracy can reach 0.1 °, this controller be take ATmega32 chip as processor, can control the The Cloud Terrace real-time follow-up sun, the angle that guarantees The Cloud Terrace and sunshine is 90 °, thereby increase the effective area of shining light of The Cloud Terrace, promote the utilization ratio of sun power, cost is low, stability is better, can be applicable to solar energy concentration generating in photovoltaic industry, solar energy thermal-power-generating, solar seawater desalination, sunlight conveyors etc. need to adopt solar tracking especially to need the occasion of the high precision tracking sun.
To achieve these goals, technical scheme of the present invention is:
A kind of solar tracking controller, by sunlight sensor, analog-digital commutator, master controller, driving circuit, button display interface, serial communication interface, power input interface, formed, described sunlight sensor output terminal is connected with modulus converter device input end, described modulus converter device output terminal is connected with master controller input end, described master controller output terminal connects driving circuit, driving circuit output terminal is connected with tripod head controlling device again, described master controller is also connected with power input interface, button display interface and serial communication interface;
Described sunlight sensor is used for gathering sunlight signal;
Described analog to digital conversion conversion equipment has been used for the analog to digital conversion to sunlight sensor voltage signal;
Described main controller circuit has been used for input, output is controlled and data operation;
Described driving circuit is for increasing the driving force of output signal;
Described button display interface connects button display module, for installing, debug, keeping in repair;
Described serial communication interface is connected to host computer, realizes serial communication function;
Described power input interface is used for connecting power supply, for system provides electric power;
Described master controller adopts Atmega32 single-chip microcomputer;
Sunlight sensor gathers sunshine position and is converted into electric signal, after analog to digital conversion, digital signal is sent into Atmega32 single-chip microcomputer, single-chip microcomputer calculates position of sun according to deviation signal, and export corresponding control signal, through overdrive circuit, control The Cloud Terrace, guarantee that holder panel is vertical with sunshine all the time, thereby realize solar tracking object, power unit is comprised of accumulator and solar panel, the electric energy that battery stores solar panel sends, provide electric power for whole system evening, button display interface connects button debugging module, for installing, debugging, maintenance.
Accompanying drawing explanation
Fig. 1 is structure principle chart of the present invention.
The front view that Fig. 2 (a) is sunlight sensor, the vertical view that Fig. 2 (b) is sunlight sensor.
Fig. 3 is analog-digital commutator connection layout.
Fig. 4 is primary controller connection layout.
Fig. 5 is the circuit catenation principle figure of driving circuit.
Fig. 6 is software flow figure.
Fig. 7 is for following the tracks of sun core algorithm software flow pattern.
Embodiment
Below in conjunction with accompanying drawing, structural principle of the present invention and principle of work are briefly described.
Below in conjunction with 2 pairs of sunlight sensors of accompanying drawing, describe, this sunlight sensor forms by the basically identical photoresistance of 8 parameters with the black cylinder of convex lens;
Sunlight sensor specific design is as follows: realize 1 of " coarse adjustment " sunlight signals collecting part
no. 4 four photoresistance are R1 with radius respectively circumference is circumscribed and symmetrical, respectively representative " north, east, south, west " four direction; And realize " fine tuning " signals collecting part 5
 1/4~1/3 of No. 8 four photoresistance, it is also symmetrical in radius is R2 circumference,
1/4~1/3 of No. 8 four photoresistance, it is also symmetrical in radius is R2 circumference, screw nipple 10 upper ends are by fixing plano-convex lens 9 levels threadably with lens fixed station 12, lower end is connected on datum plate 11 by the adjusting inner nut with datum plate 11 one, because screw nipple 10 becomes a global facility after threadably that plano-convex lens 9 levels are fixing with lens fixed station 12, so can also reach the position that regulates focus by rotate screw nipple 10 in inner nut 11.
In fact the circumference that radius is R2 is exactly the border circular areas that plano-convex lens 9 converges sunshine, and after tetra-photoelectric sensors installations of 5-8 are fixing, by rotate screw nipple 10 in inner nut 11, just can change the size of R2, thereby realize the object of adjusting as required four photoelectric sensor light-receiving areas.
The circuit of 8 photoresistance above sunlight sensor connects as shown in Figure 2 (a) shows, and in figure, R1~R8 is photoresistance, and Rf is variable resistor; When solar light irradiation photoresistance, AIN0~AIN7 orders to such an extent that voltage can change, and the current potential of this point meets following relation:

8 analog to digital conversion passages that these 8 signals are connected to respectively to modulus conversion chip have just completed the input of signal, because the parameter of photoresistance is incomplete same, adopt variable resistor Rf under identical illumination condition, to guarantee that in order to guarantee 8 photoresistance parameters are consistent.
The modulus conversion chip that described analog-digital commutator adopts is 12 bit parallel high speed analog-to-digital conversion chip MAX197, and this chip has 8 analog input channels.
It is only 5us that modulus conversion chip MAX197 carries out once the analog-to-digital time, can meet in system the requirement for real-time, if for the responsive occasion of cost compare, can not use this chip and directly use the analog-to-digital conversion module in ATmega32, now only need to be by AIN0~AIN7 and PA0~PA7 difference short circuit.
The input of described primary controller settling signal, output are controlled and data operation, the ATmega32 single-chip microcomputer of processor adopting low-power consumption, single command cycle, the signal input and output connection layout that accompanying drawing 4 is primary controller, comprises that analog signal data input channel (PA0~PA7) is for its circuit connection diagram, modulus conversion chip control line (PD4~PD7), serial communication line (PD0, PD1), ISP program downloading wire (PB5, PB6, PB7), JTAG debug port (TDI, TDO, TMS, TCK), driving control line (PB4, PB5, PB6, PB7) etc.; In addition this primary controller also comprises oscillatory circuit and reset circuit, and oscillatory circuit is connected to form by 12MHz crystal oscillator and two 20pF electric capacity.
Described driving road, for increasing the driving force of signal, drives chip to adopt integrated chip L298, and L298 can drive two two-phase electric machines, also can drive the actuating of relay, and output voltage reaches as high as 50V, and output voltage size is determined by input power; The single-phase output current of L298 can reach 2.5 A, can drive inductive load.
Table 1 L298N logic control table
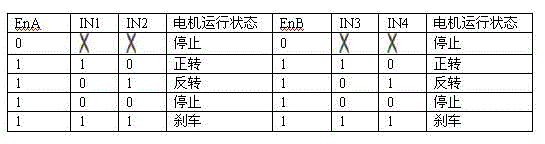
The driving circuit principle of ATmega32 single-chip microcomputer and L298 is, the PB4 of single-chip microcomputer, PB5, PB6, PB7 connect respectively the 5(IN1 of L298N), 7(IN2), 10(IN3), 12(IN4) pin, for control signal, level of control direction and working in of vertical direction motor stop.4 pin (Vss) of L298N directly connect the positive pole of solar panel.2(OUT1), 3(OUT2), 13(OUT3), 14(OUT4) pin is output terminal, connects respectively the both positive and negative polarity of two motors.Diode D6~D9, D13~D16 are fly-wheel diode, light emitting diode D10, D11, D12, D17 are for showing the rotating situation of motor, P4 is output interface, output interface is two-way, 1 pin of P4 and 2 pin Wei Yi roads, 3 pins and 4 pin Wei Yi roads, drive respectively east-west direction and the North and South direction motor of The Cloud Terrace, and this two-way is the direct current generator of power of motor below 10W directly; If need to be applied to more powerful motor, can say this two paths of signals pilot relay, and then connect heavy-duty motor by relay.
Described button display interface is connected to specific button display module, for installation, debugging, the maintenance of system.Button display module has comprised 12864 liquid crystal displays and Keyboard Control two parts.
Described serial communication modular can be connected to host computer, realizes serial communication function; For make system be easy to upgrading, system disposition serial communication modular, by this module, this system can directly be controlled by computer, monitor.In addition, this module can realize the centralized management of some specific occasion, by protocol conversion, can be formed and be had one and be shaped as the fieldbus (for example Profibus, Interbus, P-NET) with certain standard, realizes digital monitoring and the management of system.
In addition, in solar tracking controller, also increase other module, mainly contained: 1. increased eeprom chip AT24C02, for preserving the correlation parameter of setting; 2. increased in addition clock chip DS1302, like this can be so that system adopts two kinds of patterns to realize tracking, that is: mode sensor and sensor and clock binding pattern; 3. be reserved with 4 tunnel limit switch signal interfaces, for certain applications; 4. leave air velocity transducer interface, cut in wind speed sensor can be realized high wind defencive function.
Above part is the hardware design part of system, sets forth a kind of Software for Design of high-precision sun tracing controller below.This system adopts C language compilation, and programmed environment is ICCAVR, and debugging enironment is AVR studio.The overall procedure of system software as shown in Figure 7.After single-chip microcomputer electrification reset; first carry out setting parameter initialization; system is being carried out AD conversion, and and then single-chip microcomputer detects present case light conditions by sensor, carries out afterwards the processes such as outside adjusting, high wind protection, abnormality detection, internal regulation according to program.
Solar tracking core algorithm control program comprises that outside coarse adjustment program and inner accurate adjustment program form, and program circuit is as accompanying drawing 7, and 7 read-me specific works flow processs are as follows by reference to the accompanying drawings:
1.ATmega32 output corresponding control signal starts modulus conversion chip MAX197 and starts to gather sunlight sensor 8 road AD input signals;
2. AD value corresponding to 8 road input signals deposited in respectively in 8 registers, the inner east of the data representative sensor sunlight sensor black barrel of the 1st register-stored is to (hereinafter to be referred as interior east, south, west, the north to photoresistance with east to similar) AD value corresponding to photoresistance, the 2nd register-stored data represent that the inner south of sunlight sensor black barrel is to AD value corresponding to photoresistance, the 3rd register and the 4th register-stored data represent respectively interior west to, the interior north AD value to photoresistance; 5th, the 6th, the 7th, the 8th register-stored data represent respectively the outside east of sunlight sensor black barrel to, outside south to, outside west to, the outside north to photoresistance AD value;
3.ATmega32 processor is the value of the 5th and the 7th register relatively, if the value of the 5th register than the 7th greatly, illustrate sun approximate location in the Orient to; The value of the 6th and the 8th register relatively again, if the value of the 6th register than the 8th greatly, illustrate sun approximate location in south to; In conjunction with these two, just can determine that the sun is roughly in southeastern direction.In like manner, when the 5th register is than the 7th register hour, the 6th register value can be determined other several states than the 8th register value hour, that is: east, south, southwest, west, northwest, north, northeast;
4. after determining roughly direction, judge the 5th difference with the 7th register, i.e. Wai Dong and Wai Xi, if difference is greater than 15, ATmega32 single-chip microcomputer moves motor eastwards by drive motor chip L298; The signal specifically providing is that the PB4 pin of single-chip microcomputer is high level 1, and PB5 is low level 0;
Other situation is with reference to process flow diagram 7;
5. after outside regulates, turn internal regulation, internal regulation and outside adjusting are similar, but due to optically focused effect and accurate adjustment effect, the direction of internal regulation drive motor is contrary with outside, and difference also changes 8 into;
6. the 1st of the judgement difference with the 3rd register, i.e. Nei Dong and Nei Xi, if difference is greater than 8, ATmega32 single-chip microcomputer moves motor westwards by drive motor chip L298; The signal specifically providing is that the PB4 pin of single-chip microcomputer is low level 0, and PB5 is high level 1;
Other situation is with reference to process flow diagram 7;
7. repeat above-mentioned 1~6 step, until system is adjusted to, aim at the sun.
Claims (3)
1. a solar tracking controller, by sunlight sensor, analog-digital commutator, master controller, driving circuit, button display interface, serial communication interface, power input interface, formed, it is characterized in that, described sunlight sensor output terminal is connected with analog-digital commutator input end, described analog-digital commutator output terminal is connected with master controller input end, described master controller output terminal connects driving circuit, driving circuit output terminal is connected with tripod head controlling device again, described master controller is also connected with power input interface, button display interface and serial communication interface;
Wherein the operation steps of solar tracking controller is as follows, and the first step, master controller output corresponding control signal start analog-digital commutator and start to gather sunlight sensor 8 road AD input signals;
Second step, AD value corresponding to 8 road input signals deposited in respectively in 8 registers, the inner east of data representative sensor sunlight sensor black barrel of the 1st register-stored is to AD value corresponding to photoresistance, hereinafter to be referred as interior east, south, west, the north to photoresistance and east to similar, the 2nd register-stored data represent that the inner south of sunlight sensor black barrel is to AD value corresponding to photoresistance, the 3rd register and the 4th register-stored data represent respectively interior west to, the interior north AD value to photoresistance; 5th, the 6th, the 7th, the 8th register-stored data represent respectively the outside east of sunlight sensor black barrel to, outside south to, outside west to, the outside north to photoresistance AD value;
The 3rd step, master controller processor be the value of the 5th and the 7th register relatively, if the value of the 5th register than the 7th greatly, illustrate sun approximate location in the Orient to; The value of the 6th and the 8th register relatively again, if the value of the 6th register than the 8th greatly, illustrate sun approximate location in south to; In conjunction with these two, just can determine that the sun is roughly in southeastern direction; In like manner, when the 5th register is than the 7th register hour, the 6th register value can be determined other several states than the 8th register value hour, that is: east, south, southwest, west, northwest, north, northeast;
The 4th step, after determining roughly direction, judge the 5th difference with the 7th register, i.e. Wai Dong and Wai Xi, if difference is greater than 15, master controller single-chip microcomputer moves motor eastwards by drive motor chip L298; The signal specifically providing is that the PB4 pin of single-chip microcomputer is high level 1, and PB5 is low level 0;
The 5th step, after outside regulates, turn internal regulation, internal regulation and outside regulate similarly, but due to optically focused effect and accurate adjustment effect, the direction of internal regulation drive motor is contrary with outside, difference also changes 8 into;
The 1st difference with the 3rd register of the 6th step, judgement, i.e. Nei Dong and Nei Xi, if difference is greater than 8, master controller single-chip microcomputer moves motor westwards by drive motor chip L298; The signal specifically providing is that the PB4 pin of single-chip microcomputer is low level 0, and PB5 is high level 1;
The 7th step, repeat above-mentioned the first~six step, until system is adjusted to, aim at the sun.
2. a kind of solar tracking controller according to claim 1, is characterized in that, described sunlight sensor is used for gathering sunlight signal;
Described analog-digital commutator has been used for the analog to digital conversion to sunlight sensor voltage signal;
Described main controller circuit has been used for input, output is controlled and data operation;
Described driving circuit is for increasing the driving force of output signal;
Described button display interface connects button display module, for installing, debug, keeping in repair;
Described serial communication interface is connected to host computer, realizes serial communication function;
Described power input interface is used for connecting power supply, for system provides electric power.
3. a kind of solar tracking controller according to claim 1, is characterized in that, described master controller adopts Atmega32 single-chip microcomputer.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210042875.9A CN102591359B (en) | 2012-02-24 | 2012-02-24 | Solar tracking controller |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210042875.9A CN102591359B (en) | 2012-02-24 | 2012-02-24 | Solar tracking controller |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102591359A CN102591359A (en) | 2012-07-18 |
| CN102591359B true CN102591359B (en) | 2014-04-16 |
Family
ID=46480178
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210042875.9A Expired - Fee Related CN102591359B (en) | 2012-02-24 | 2012-02-24 | Solar tracking controller |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102591359B (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103078557A (en) * | 2013-02-04 | 2013-05-01 | 江苏科技大学 | Multifunctional portable solar tracking power generation device and method |
| CN103235603A (en) * | 2013-05-03 | 2013-08-07 | 沈阳航空航天大学 | Automatic sun tracking device and control method |
| CN105302165A (en) * | 2015-11-27 | 2016-02-03 | 胡国旺 | Photovoltaic power generation automatic tracking system |
| CN105717950A (en) * | 2015-12-21 | 2016-06-29 | 南宁学院 | Light source tracking system |
| DE102018002404A1 (en) * | 2018-03-23 | 2019-09-26 | Azur Space Solar Power Gmbh | Sonnennachführeinheit |
| CN108646792A (en) * | 2018-05-29 | 2018-10-12 | 西安理工大学 | Control device and control method of the photovoltaic generation holder group from motion tracking |
| CN114355990A (en) * | 2021-12-28 | 2022-04-15 | 广西壮族自治区公众信息产业有限公司 | Solar tracking servo device based on photosensitive resistor |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201716597U (en) * | 2010-06-29 | 2011-01-19 | 苏州市职业大学 | Digital solar automatic tracking controller |
| CN102156482A (en) * | 2011-04-11 | 2011-08-17 | 京信通信技术(广州)有限公司 | Solar azimuth angle tracking controller and tracking method thereof |
| CN102221837A (en) * | 2011-06-21 | 2011-10-19 | 梁幸平 | Automatic steering control system of solar cell panel |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006017955A1 (en) * | 2004-08-17 | 2006-02-23 | Yaoming Zhang | A detecting solar lighting mirrors apparatus |
| WO2011085557A1 (en) * | 2010-01-15 | 2011-07-21 | 苏州恒阳新能源科技有限公司 | Light signal sensor |
-
2012
- 2012-02-24 CN CN201210042875.9A patent/CN102591359B/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201716597U (en) * | 2010-06-29 | 2011-01-19 | 苏州市职业大学 | Digital solar automatic tracking controller |
| CN102156482A (en) * | 2011-04-11 | 2011-08-17 | 京信通信技术(广州)有限公司 | Solar azimuth angle tracking controller and tracking method thereof |
| CN102221837A (en) * | 2011-06-21 | 2011-10-19 | 梁幸平 | Automatic steering control system of solar cell panel |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102591359A (en) | 2012-07-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102591359B (en) | Solar tracking controller | |
| CN201918930U (en) | Concentrated photovoltaic automatic solar tracking power generating device capable of realizing point tracking at highest power | |
| CN102269990B (en) | Intelligent control network system of photovoltaic power generation array | |
| CN102155358A (en) | Light-gathering wind and light complementary power station with automatic sun tracking function and maximum power point tracking function | |
| CN101859152A (en) | Solar-cell panel sun tracking system and control method thereof | |
| CN203759552U (en) | Efficient solar automatic tracking device | |
| CN101833339B (en) | Universal-type solar real-time automatic tracking control system based on microcomputer | |
| CN206671902U (en) | A kind of automatic sun-tracking energy panel system | |
| CN101777856B (en) | Photovoltaic tracking device using photosensitive difference and network-based monitoring method | |
| CN103823479A (en) | Photovoltaic tracking control system mounted on building external wall | |
| CN103135602A (en) | Sun azimuth tracking control system | |
| CN204719546U (en) | A kind of solar charging device of automatic light tracking | |
| CN203941456U (en) | Solar energy tracking control system | |
| CN203444340U (en) | Dual-shaft automatic sun tracking controller | |
| CN206115288U (en) | Automatic trail two analog input photovoltaic module motion directional control circuit | |
| CN202120128U (en) | Solar photoelectric sensor capable of automatic tracking | |
| CN207937882U (en) | A kind of solar energy automatic tracking acquisition system | |
| CN207637005U (en) | The solar tracking control system of high-effective concentration | |
| CN103809608A (en) | Novel polar axis type sun tracking system control circuit | |
| CN202394123U (en) | Control system for solar tracking directional reflector | |
| CN102289233A (en) | High-sensitivity photosensitive system for sunlight tracker | |
| CN206339871U (en) | A kind of intelligentized solar energy automatic tracking control system | |
| CN206162203U (en) | Sun tracking device | |
| CN205862239U (en) | MPPT solar automobile tracking control unit | |
| CN103425141A (en) | Intelligent double-precision sun automatic tracking system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20140416 Termination date: 20210224 |