CN102233297A - 单轴破碎机以及双轴破碎机 - Google Patents
单轴破碎机以及双轴破碎机 Download PDFInfo
- Publication number
- CN102233297A CN102233297A CN2010105629346A CN201010562934A CN102233297A CN 102233297 A CN102233297 A CN 102233297A CN 2010105629346 A CN2010105629346 A CN 2010105629346A CN 201010562934 A CN201010562934 A CN 201010562934A CN 102233297 A CN102233297 A CN 102233297A
- Authority
- CN
- China
- Prior art keywords
- rotor
- broken
- counteredge
- rotation
- zone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Abstract
本发明提供单轴破碎机以及双轴破碎机,对包括例如家庭的粗大垃圾的大型被破碎物体和PET塑料瓶等圆筒状被破碎物体,旋转刀刃能够以大咬入量(咬入深度)咬入,以较高效率进行破碎。在具备旋转的转子、设置于转子的表面上的多个旋转刀刃、以及设置于壳体,在与多个旋转刀刃之间对被破碎物体进行剪切破碎的第1固定刀刃和第2固定刀刃的单轴破碎机中,转子表面具有多个旋转刀刃在转子的周方向的大约180度的规定范围内的不均匀分布,以及在转子的轴方向的全部范围设置的破碎区域、其中旋转刀刃跨越转子的周方向的约180度的规定的范围,以及不在转子的轴方向的全部范围设置的非破碎区域。
Description
技术领域
本发明涉及对包括例如家庭的粗大垃圾的大型被破碎物体和PET塑料瓶等圆筒状被破碎物体,旋转刀刃能够以大咬入量(咬入深度)咬入,以较高效率进行破碎的单轴破碎机和双轴破碎机。
背景技术
作为向来已有的单轴破碎机的一个例子,有图10和图11所示的单轴破碎机(参照例如专利文献1)。对该图10所示的单轴破碎机1,从料斗2提供被破碎物体3时,形成该被破碎物体3被载置于旋转的转子4上的状态。这时,使推料器5向前进方向移动,将被破碎物体3按压在转子4的表面上时,设置于转子4的表面上的多个旋转刀刃6能够强行将该被破碎物体3咬入其与固定刀刃7之间进行破碎。而且破碎片q向转子4的下方落下并被排出。
还有,如图10所示,旋转刀刃6在转子4的同心圆周上间隔约90度配置,总共设置4个。而且如图11所示,多个旋转刀刃6呈Z字形地配置于转子4的表面上,借助于此,旋转刀刃6在与形成于板状体的前端缘部的固定刀刃7之间咬入被破碎物体3时不会承受太大的负荷。在该图11中,只在转子4的同心圆周上表示出一个旋转刀刃6,而另外3个旋转刀刃6被省略。
专利文献1:特开平9-57138号公报。
发明内容
但是图10所示的已有的单轴破碎机1中,将例如粗大垃圾等大型被破碎物体3用推料器5按压在转子4上时,有形成被破碎物体3跨在同一圆周上间隔90度设置的相邻的旋转刀刃6上的状态的情况。在这种状态下,旋转刀刃6即使旋转,旋转刀刃6能够咬入高大型被破碎物体3的深度也小,因此有时候旋转刀刃6的刀刃前端只能够擦到被破碎物体3的表面,在这样的情况下,不能够高效率地对被破碎物体3进行破碎。
本发明是为了解决上述存在问题而作出的,其目的在于,提供对包括例如家庭的粗大垃圾的大型被破碎物体和PET塑料瓶等圆筒状被破碎物体,旋转刀刃能够以大咬入量(咬入深度)咬入,以较高效率进行破碎的单轴破碎机和双轴破碎机。
本发明的单轴破碎机,具备以旋转轴为中心旋转的转子、设置于该转子的表面上的多个旋转刀刃、以及设置于固定部的固定刀刃,在所述固定刀刃与所述多个旋转刀刃之间对被破碎物体进行剪切破碎,其中,所述转子表面具有破碎区域,即所述多个旋转刀刃在所述转子的周方向的规定范围内不均匀分布的区域,以及在所述转子的轴方向的范围设置的区域、并具有非破碎区域,即所述旋转刀刃在所述转子的周方向的规定范围内的区域,以及不在所述转子的轴方向的范围设置的区域。
如果采用本发明的单轴破碎机,则通过使转子旋转,能够在多个旋转刀刃与固定刀刃之间夹入被破碎物体,依序对该被破碎物体进行剪切破碎。而且在转子表面上,具有非破碎区域,即旋转刀刃在转子的周方向的规定范围的区域,以及不在转子的轴方向的范围设置的区域,因此在对其提供例如大型的被破碎物体和PET塑料瓶那样的圆筒状被破碎物体时,可以在转子表面的非破碎区域阻挡被破碎物体。也就是说,可以使被破碎物体不保持跨在转子的周方向的相邻的旋转刀刃上的状态。借助于此,能够加大旋转刀刃与固定刀刃咬入大型的被破碎物体和PET塑料瓶等圆筒状被破碎物体的咬入量(咬入深度),旋转刀刃与固定刀刃能够可靠地咬入这些被破碎物体并将其破碎。
在本发明的单轴破碎机中,在所述破碎区域,将3~5个所述旋转刀刃设置于所述转子的同一圆周上,所述非破碎区域可在所述转子的同一圆周上形成于120度~220度的范围。
这样,通过在破碎区域中,在转子的同一圆周上设置3~5个旋转刀刃,能够加大同一圆周上设置的旋转刀刃的间隔,旋转刀刃容易深深咬入粗大垃圾那样的大型被破碎物体,高效率地进行破碎。在这里,旋转刀刃采用两个以下时,不能够得到所需要的破碎能力。而旋转刀刃采用6个以上时,旋转刀刃难以将被处理物体深深咬入,不能够进行有效的破碎,而且增加旋转刀刃的成本。
而且可以通过在转子的同一圆周上,将非破碎区域形成于120度~220度的范围,能够在转子的大致半个表面的非破碎区域可靠地抓住大型被破碎物体。
还有,如果在转子的同一圆周上每隔大约90度(圆周的4等分位置上)设置3个旋转刀刃,能够在转子的同一圆周上的约180度的范围上形成非破碎区域;而如果每隔大约72度(圆周的5等分位置上)设置3个旋转刀刃,则能够在转子的同一圆周上的约220度的范围上形成非破碎区域。而如果每隔大约60度(圆周的6等分位置上)设置5个旋转刀刃,则能够在转子的同一圆周上的约120度的范围上形成非破碎区域。
在本发明的单轴破碎机可以是在所述旋转刀刃与所述固定刀刃啮合的位置的上方,形成引导被破碎物体的引导通道;所述引导通道利用所述转子的断面为圆弧状的倾斜表面和所述固定刀刃的倾斜刀刃面形成越是向下方前头越细的形状。
这样一来,能够利用转子的断面为圆弧状的倾斜表面与固定刀刃的倾斜刀刃面将提供给引导通道的被破碎物体向下方引导,在该下方设置旋转刀刃与固定刀刃啮合的位置,因此能够可靠地高效率地对被破碎物体进行破碎。
在本发明的单轴破碎机中,具备能够将进入所述引导通道或其近旁的被破碎物体推压在壳体上的推料器。
这样一来,能够用推料器将被旋转刀刃与固定刀刃咬入的被破碎物体推压在壳体上,因此能够使旋转刀刃与固定刀刃咬入的被破碎物体不逃离,能够可靠地对被破碎物体进行破碎。
本发明的单轴破碎机中,可以在利用所述推料器将被破碎物体推压于其上的壳体的部分,设置在向着所述固定刀刃的方向上延伸的凸条,该凸条的顶部的至少一部分与所述旋转刀刃的前端部相对地配置。
这样一来,能够在往推压被破碎物体的方向移动的推料器与凸条之间咬住被破碎物体。而且由于该凸条在向着固定刀刃的方向上延伸,因此能够将被破碎物体引向向着固定刀刃的方向,同时能够阻止被破碎物体在水平方向上移动,借助于此,能够可靠地对被破碎物体进行破碎。
而且由于该凸条的顶部的一部分与旋转刀刃的前端部相对地配置,能够减少被破碎物体的按压在向着刀刃上的部分进入凸条与凸条之间形成的槽的情况的发生。借助于此,能够顺利地将被破碎物体引向固定刀刃侧。
在本发明的单轴破碎机中,利用所述推料器推压被破碎物体于其上的壳体的部分由门形成,该门是能够开闭的可排出与被破碎物体一起提供的异物的排出口的门。
这样一来,例如提供了被破碎物体,混入该被破碎物体中的异物进入引导通道或其近旁时,通过打开门,使其向将推料器向门按压的方向移动,能够自动地将异物从排出口向外侧排出。
还有,例如该硬质异物一旦进入引导通道或其近旁,则会在不被破碎的情况下滞留于该引导通道或其近旁,因此接着的被破碎物体不能够得以破碎,破碎工作不能够进行,而一旦这样的异物被排出到外侧,就能够进行破碎工作。
在本发明的单轴破碎机中,可以在外周部设置多个旋转刀刃,而且在该外周部形成槽部的板状的旋转刀刃体与外径比该旋转刀刃体小的板状衬垫在轴方向上交替配置,形成于所述旋转刀刃体的槽部的底与所述衬垫的外周面大致一致地形成。
这样一来,例如固定刀刃的前端部与旋转的衬垫的外周面之间(例如引导通道)中夹入被破碎物体时,一旦该槽部向安装固定刀刃的部分旋转移动,该被破碎物体就被固定刀刃从该槽部推出脱落。这样,接着的被破碎物体就能够依序向旋转刀刃与固定刀刃啮合的位置移动,能够连续地对被破碎物体进行破碎。而且一旦形成这样的槽部,卷绕在衬垫上的被破碎物体就能够使用前端部的尖出的棒状体从该槽部去除。
还有,将旋转刀刃体的通过旋转刀刃的根部的外径(基础圆)做得比衬垫的外径大,是为了发挥旋转刀刃体的基础圆的比衬垫更向半径方向外侧突出的圆环部分能够利用固定刀刃剪切破碎被破碎物体的功能。
在本发明的单轴破碎机中,可以是所述多个旋转刀刃的各旋转刀刃,具有与所述固定刀刃啮合的两侧的第1边缘部和第2边缘部,使一侧的所述第1边缘部与所述固定刀刃之间的第1间隙比另一侧的所述第2边缘部与所述固定刀刃之间的第2间隙小,利用所述第1边缘部与所述固定刀刃破碎被破碎物体,并且能够从所述第2间隙排出被破碎物体的破碎片。
这样一来,能够利用旋转刀刃的一侧的第1边缘部与固定刀刃破碎被破碎物体,并且能够从旋转刀刃的另一侧的第2边缘部与固定刀刃之间形成的第2间隙排出被破碎物体的破碎片。借助于此,能够减小破碎负荷,能够谋求转子的驱动装置的小型化,能够谋求降低该单轴破碎机的费用。而且能够从第2间隙排出破碎片,因此能够谋求提高破碎效率。
在本发明的单轴破碎机中,所述固定刀刃由并排配置于所述转子的轴方向的多个固定刀刃构成,各固定刀刃可装卸自如地分别用螺栓安装于壳体上。
这样一来,能够极其简单地以短时间从壳体上卸下例如需要更换的固定刀刃,并安装替换用的固定刀刃。
本发明的双轴破碎机,具备以各自的旋转轴为中心旋转的第1转子和第2转子,在所述第1转子和第2转子各自的表面上分别设置多个旋转刀刃,在所述第1转子上设置的多个旋转刀刃与所述第2转子上设置的多个旋转刀刃之间对被破碎物体进行剪切破碎,其中,所述第1转子和第2转子各自的表面具有破碎区域,即所述多个旋转刀刃在所述转子的周方向的规定范围内不均匀分布的区域,以及在所述各转子的轴方向的范围设置的区域、并具有非破碎区域,即所述旋转刀刃在所述转子的周方向的规定范围内的区域,以及不在所述各转子的轴方向的范围设置的区域。
如果采用本发明的双轴破碎机,则通过使第1转子和第2转子旋转,在第1转子的旋转刀刃与第2转子的旋转刀刃之间夹入被破碎物体,能够依序对该被破碎物体进行剪切破碎。而且第1转子和第2转子的各自的表面上具有非破碎区域,即旋转刀刃在各转子的周方向的规定范围的区域,以及不在各转子的轴方向的范围设置的区域,因此在提供例如大型的被破碎物体或PET塑料瓶那样的圆筒形被破碎物体时能够在第1转子和(或)第2转子的表面上的非破碎区域抓住被破碎物体。也就是说,被破碎物体不会维持跨在第1转子和(或)第2转子的周方向的相邻的旋转刀刃上的状态。借助于此,能够加大旋转刀刃和固定刀刃对大型被破碎物体和PET塑料瓶等圆筒状被破碎物体的咬入量(咬入深度),旋转刀刃和固定刀刃能够可靠地咬入这些被破碎物体进行破碎。
如果采用本发明的单轴破碎机,则在提供例如包含粗大垃圾的大型被破碎物体或PET塑料瓶那样的圆筒形被破碎物体时能够用转子表面上的非破碎区域抓住被破碎物体,以此加大旋转刀刃和固定刀刃对这些被破碎物体的咬入量(咬入深度)。从而,能够使用廉价的小型单轴破碎机对这样的大型的被破碎物体或PET塑料瓶那样的圆筒形被破碎物体可靠地进行破碎。
如果采用本发明的双轴破碎机,则与上面所述相同,能够利用第1转子和第2转子各自的旋转刀刃对大型的被破碎物体和PET塑料瓶那样的圆筒形被破碎物体可靠地进行破碎。而且能够发挥比单轴破碎机大的破碎处理能力。
附图说明
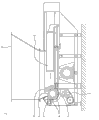
图1是表示本发明的一个实施形态的单轴破碎机纵剖面图。
图2是表示图1所示的上述实施形态的单轴破碎机的要部的放大纵剖面图。
图3是表示上述实施形态的单轴破碎机的横剖面图。
图4是表示图3所示的上述实施形态的单轴破碎机的要部的放大横剖面图。
图5是表示图3所示的上述实施形态的单轴破碎机的旋转刀刃与第2固定刀刃的啮合的放大横剖面图。
图6表示上述实施形态具备的旋转刀刃体,(a)是旋转刀刃体的正视图,(b)是旋转刀刃体的侧视图。
图7表示将上述实施形态具备的旋转刀刃以及衬垫相互重叠的状态,a)为其正视图,(b)为其侧视图。
图8表示上述实施形态具备的第1固定刀刃,(a)为其俯视图,(b)为其正视图,(c)为其侧视图。
图9表示上述实施形态具备的第2固定刀刃,(a)为其俯视图,(b)为其正视图,(c)为其侧视图。
图10是表示现有的单轴破碎机的纵剖面图。
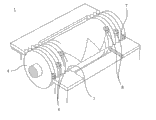
图11是表示图10所示的该现有的单轴破碎机中设置的旋转刀刃的配置的立体图。
符号说明:
11 单轴破碎机;
12 旋转轴;
13 转子;
13a 倾斜表面;
14 旋转刀刃;
14a 刀刃面;
15 壳体;
16 第1固定刀刃;
16a 倾斜刀刃面;
17 第2固定刀刃;
17a 倾斜刀刃面;
17b 中央凸部;
17c 缓倾斜面;
17d 侧部平坦面;
18 料斗;
19 推料器;
19a 按压部;
19b 驱动部;
20 旋转刀刃体;
21 衬垫(spacer);
22 旋转刀刃主体;
23 破碎区域;
24 非破碎区域;
25 插通孔;
26 轴承;
27 网筛;
28 螺栓;
29 阴螺丝部;
30 引导通道;
31 槽部;
32 门;
32a 枢轴支持构件;
33 凸条;
34 排出口;
35 门驱动部;
36 第1边缘部;
37 第2边缘部;
38 第1间隙;
39 第2间隙;
40 刮刀;
S 收容空间;
q 破碎片。
具体实施方式
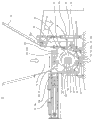
下面参照图1~9对本发明的单轴破碎机的一个实施形态进行说明。该单轴破碎机11,如图1所示,具备以旋转轴12为中心旋转的转子13、设置于该转子13的表面上的多个旋转刀刃14、以及设置于壳体(固定部)15,在与所述多个旋转刀刃14之间对被破碎物体进行剪切破碎的第1固定刀刃16以及第2固定刀刃17。而且该单轴破碎机11的旋转刀刃14能够以较大的刀刃咬入量(咬入深度)咬入例如包含家庭的粗大垃圾的大型被破碎物体和PET塑料瓶等圆筒状被破碎物体并对其进行破碎。而且利用单轴破碎机11对被破碎物体进行破碎是为了能够将例如废弃物等被破碎物体作为锅炉燃料、农资材料等循环利用。
单轴破碎机11如图1所示,具备壳体15、配设于壳体15的内部的转子13、设置于转子13表面上的多个旋转刀刃14、设置于壳体15上,沿着转子13的表面上配置的第1固定刀刃16和第2固定刀刃17、安装于壳体15的上部的料斗18、以及安装于壳体15的侧部的推料器19。
料斗18形成对收容空间S提供被破碎物体用的供给口。
壳体15是构成支持上述各零部件的基台的部分。而且在壳体15内部形成收容被破碎物体的俯视大致为四边形的收容空间S,转子13、料斗18以及推料器19等包围着收容空间S在壳体15上固定设置。
如图2和图3所示,外周面上设置多个旋转刀刃14的转子13由多个旋转刀刃体20、多个衬垫21、以及旋转轴12等构成。
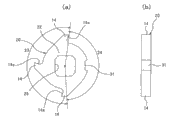
该旋转刀刃体20如图6(a)、图6(b)所示,具有大致为圆板状的旋转刀刃体22,在该旋转刀刃体22的外周部设置例如总计3个的旋转刀刃14,使各旋转刀刃14向半径方向外侧突出。
这3个旋转刀刃14分别在旋转刀刃体22的外周部的周方向上每隔约90度设置一个,作为前倾面的刀刃面14a大致形成为四边形。该前倾面构成正前倾角。
如该图6(a)的正视图所示,在旋转刀刃体20的外周部的左半部分的大约180度的范围不均匀地设置3个旋转刀刃14的区域为破碎区域23,而在旋转刀刃体20的外周部的右半部分的大约180度的范围不设置旋转刀刃14的区域为非破碎区域24。
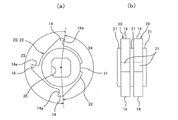
这样形成的多个旋转刀刃体20,如图7(a)、图7(b)所示,与形成圆板状的多个衬垫21交互重叠,各自的中心形成的大致为矩形的插通孔25中插通旋转轴12,多个旋转刀刃体20、多个衬垫21以及旋转轴12连接成一整体。如图4所示,这样就完成在外周面上设置多个旋转刀刃14的转子13的组装。从而,转子13具备多个旋转刀刃体20、多个衬垫21、以及旋转轴12。
这样构成的转子13的表面具有多个旋转刀刃14在转子13的周方向的大约180度的规定范围不均匀分布,而且在转子13的轴方向的全部范围设置的破碎区域23、以及旋转刀刃14跨越转子13的周方向的约180度的规定的范围,而且在转子13的轴方向的全部范围没有设置的非破碎区域24。
而且在转子13的表面上,例如多个旋转刀刃14排列为多条螺旋状或Z字形设置,以此将破碎区域23形成为螺旋状或Z字形。这样做,能够谋求减少在一直线上排列的旋转刀刃14的数目,在多个旋转刀刃中的各旋转刀刃14与第1固定刀刃16和第2固定刀刃17之间夹入被破碎物体矩形剪切破碎时,能够防止对第1固定刀刃16和第2固定刀刃17以及转子13施加过大的负荷。
而且插通转子13的中心部的旋转轴12由安装于壳体15上的轴承26、26旋转自如地加以支持。这样做,转子13由轴承26、26旋转自如地加以支持。而且在转子13的旋转轴12上,通过齿轮单元等连接驱动电动机(图示省略)。利用该驱动电动机可以使转子13向规定的方向旋转。转子13的旋转速度被设定为例如30rpm以下的低速。
又如图1所示,在壳体15的内部,转子13被旋转自如地加以支持,转子13,其上部的外周面的一部分面对收容空间S配置,而且转子13的下部的外周面的一部分利用网筛27隔着一定距离覆盖。在该网筛27上形成许多孔,被破碎物体在多个旋转刀刃14、第1固定刀刃16和第2固定刀刃17之间被反复剪切破碎,直到比网筛上形成的许多孔的尺寸小。从而,通过更换孔径不同的网筛能够调整最后得到的破碎片q的尺寸。
而且在网筛27的下方配设传送带等输送装置(图示省略),通过网筛27的孔落下的破碎片q由该输送装置输送到下一工序。
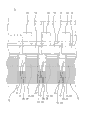
下面对第1固定刀刃16和第2固定刀刃17进行说明。如图2和图4所示,在壳体15的内表面上,在一直线上交替配置多个第1固定刀刃16和第2固定刀刃17。这样,在一直线上交替配置多个第1固定刀刃16和第2固定刀刃17的方向是与转子13的旋转轴12平行的方向,这些在一直线上配置多个第1固定刀刃16和第2固定刀刃17形成与转子13大致相同的长度。
而且这些第1固定刀刃16和第2固定刀刃17,与转子13的外表面相对配置,能够在与设置于转子13的外表面的多个旋转刀刃14之间利用剪切力对被破碎物体进行破碎,而且这些第1固定刀刃16和第2固定刀刃17利用硬质金属材料等形成板状。而且各第1固定刀刃16和第2固定刀刃17如图2所示,分别利用螺栓28装卸自如地安装于壳体15。
各第1固定刀刃16分别具有相同的形状,如图8(a)、图8(b)、图8(c)所示,为板状块,上表面(倾斜刀刃面16a)形成为凹状弯曲面,下部形成能够与螺栓28拧合的两个阴螺丝部29、29。该第1固定刀刃16,如图2所示,在将第1固定刀刃16安装于壳体15上的状态下,转子13旋转而旋转刀刃14旋转时,旋转刀刃14的刀尖与形成于第1固定刀刃16的上表面的倾斜刀刃面16a之间保持间隙形成能够旋转移动的状态。
而且如图9(a)、图9(b)、图9(c)所示,各第2固定刀刃17分别为相同的形状,为板状块,上表面(倾斜刀刃面17a)上形成高度较低的台状中央凸部17b,在该中央凸部17b的上表面形成中央平坦面,在该中央平坦面的两侧形成缓倾斜面17c、17c。而且在各缓倾斜面17c、17c的各自的外侧形成侧部平坦面17d。还在各第2固定刀刃17的下部形成螺栓能够拧合的两个阴螺部。
该第2固定刀刃17,如图2所示,形成为能够在将第2固定刀刃17安装于壳体15上的状态下,旋转刀刃14与转子13一起旋转时,旋转刀刃14的刀尖以很小的间隙从该刀尖开始啮合,并旋转移动通过形成于该第2固定刀刃17的倾斜刀刃面17a(上表面)的一侧缓倾斜面17c的侧方位置。
又如图2所示,各第1固定刀刃16和第2固定刀刃17分别用螺栓28装卸自如地固定于壳体15,因此能够用极其简单的方法在很短的时间只将例如需要替换的第1固定刀刃16或第2固定刀刃17从壳体取下,安装替换用的第1固定刀刃16或第2固定刀刃17。
下面参照图2对引导被破碎物体的引导通道30进行说明。该引导通道30是将提供给收容空间S的被破碎物体引导到旋转刀刃14与第1固定刀刃16和第2固定刀刃17啮合的位置上用的通道,形成于旋转刀刃14与第1固定刀刃16和第2固定刀刃17啮合的位置的上方。
引导通道30利用转子13的断面为圆弧状的倾斜表面13a与各第1固定刀刃16的倾斜刀刃面16a(上表面),形成越往下方前头越细的形状。
如果采用如该图1所示形成的引导通道30,则被提供给收容空间S的被破碎物体可由转子13的断面为圆弧状的倾斜表面13a与多个第1固定刀刃16的倾斜刀刃面16a向下引导,由于在该下方设置多个旋转刀刃14与多个第1固定刀刃16和第2固定刀刃17啮合的位置,因此能够高效率地对被破碎物体可靠地进行破碎。
下面参照图7(a)、图7(b)对形成于旋转刀刃体20的非破碎区域24的大致中央的槽部31进行说明。该槽部31是构成旋转刀刃体20的旋转刀刃主体22的外周部,在非破碎区域24的大约中央形成例如一个。而且该槽部31的底形成与比该旋转刀刃主体22外径小的圆板状衬垫21的外周面大致相同的深度。
借助于该槽部31,被破碎物体被夹在图2所示的第2固定刀刃17的倾斜刀刃面17a与旋转的衬垫21的外周面之间(引导通道30)时,一旦该槽部31旋转移动到第2固定刀刃17的安装位置,该被破碎物体就被第2固定刀刃17从该槽部31推出脱落。借助于此,接着的被破碎物体就能够依序向旋转刀刃14与第1固定刀刃16和第2固定刀刃17啮合的部分(引导通道30)移动,能够连续地对被破碎物体进行破碎。而且一旦形成这样的槽部31,就能够使用前端部尖出的棒状体从该槽部31去除卷绕在衬垫21上的被破碎物体。
还有,将构成旋转刀刃体20的旋转刀刃主体22的外径(通过旋转刀刃14的根部的基础圆)做的比衬垫21的外径大,是为了使旋转刀刃体20的基础圆的比衬垫21更向半径方向外侧突出的圆环部分发挥能够利用第1固定刀刃16和第2固定刀刃17对被破碎物体进行剪切破碎的作用。
推料器19如图1和图3所示,能够将从料斗18提供给收容空间S的内部,进入引导通道30或其近旁的被破碎物体,推压在可摇动自如地设置于壳体15上的门32的内表面上,该推料器具有按压被破碎物体的按压部19a、以及使按压部19a在接近和远离门32的内表面的方向上往复运动的驱动部19b。
如果利用该推料器19,则能够将由旋转刀刃14与第1固定刀刃16和第2固定刀刃17咬入的被破碎物体用按压部19a按压在门32上,因此能够避免被旋转刀刃14与第1固定刀刃16及第2固定刀刃17咬住的被破碎物体脱落,因此能够可靠地实施对被破碎物体的破碎。
又如图2和图4所示,利用推料器19按压被破碎物体于其上的门32的内表面上,设置在向着第1固定刀刃16和第2固定刀刃17的方向(铅直方向)上延伸的多条凸条33。而且各凸条33的矩形断面的顶部的至少一部分与各向着旋转刀刃14的矩形断面的前端部相对配置(参照图4)。
利用这些凸条33,能够在向推被破碎物体的方向移动的推料器19的按压部19a与凸条33之间夹住被破碎物体。而且由于该凸条33在指向第1固定刀刃16和第2固定刀刃17的方向上延伸,能够将被破碎物体向指向第1固定刀刃16和第2固定刀刃17的方向引导,同时能够阻止被破碎物体在水平方向上移动,借助于此,能够可靠地对被破碎物体进行破碎。
而且如图4所示,凸条33的矩形断面的顶部的至少一部分,由于与旋转刀刃14的矩形断面的前端部相对配置,能够减轻被破碎物体的旋转刀刃14按压的部分进入凸条33与凸条33之间形成的槽的程度。借助于此,能够将被破碎物体顺利地引导到第1固定刀刃16和第2固定刀刃17一侧。
又,这些凸条33,如图2所示,形成为能够将提供给收容空间S的被破碎物体引向其下方的引导通道30的形状。而且这些凸条33利用转子13的断面为圆弧状的倾斜表面13a与各第1固定刀刃16的倾斜刀刃面16a(上表面),形成越是往下前头越是细的空间。
而且如图2所示,推料器19按压被破碎物体的壳体15的部分由门32形成,该门32能够开闭形成用于排出与被破碎物体一起提供的异物的排出口34。该门32,如图2所示,能够以枢轴支持构件32a为中心摇动自如,向壳体15外侧摇动时能够打开排出口34。又,该门32利用门驱动部35实施开闭驱动。
利用该门32,提供例如被破碎物体,混入该被破碎物体的异物进入引导通道30或其近旁时,能够打开门32,使推料器19的按压部19a向推向门32的方向移动,这样能够将异物从排出口34自动地排出到外侧。
还有,一旦例如硬质异物进入引导通道30或其近旁,就在不能破碎的情况下滞留于该引导通道30或其近旁,因此接着的被破碎物体不能够被破碎,破碎工作不能够进行,一旦这样将异物排出到外侧,就能够进行破碎工作。
下面参照图5对各旋转刀刃14与第2固定刀刃17之间的啮合进行说明。如图5所示,多个旋转刀刃14的各旋转刀刃14具有与相邻的两个第2固定刀刃17分别啮合的两侧的第1边缘部36以及第2边缘部37。而且形成如下所述结构,即将旋转刀刃14的第1边缘部36与一个第2固定刀刃17之间的第1间隙38做得比第2边缘部37与另一个第2固定刀刃17之间的第2间隙39小,能够利用第1边缘部36与第2固定刀刃17对被破碎物体进行破碎,从第2间隙39排出被破碎物体的破碎片q。
这样一来,能够利用旋转刀刃14的第1边缘部与一个第2固定刀刃17对被破碎物体进行破碎,能够从旋转刀刃14的第2边缘部37与另一个第2固定刀刃17之间形成的第2间隙39排出被破碎物体的破碎片q。借助于此,能够减小破碎负荷,能够谋求转子13的旋转驱动电动机的小型化,能够谋求降低该单轴破碎机的费用。而且能够从第2间隙39排出破碎片q,因此能够谋求提高破碎效率。
但是,在上述实施形态中,如图5所示,将第1间隙38做得比第2间隙39小,但是也可以代之以,加大第2固定刀刃17的厚度,第1间隙38和第2间隙39做成相同大小的间隙(与第1间隙38相同大小的间隙),利用第1边缘部36和第2边缘部37两个边缘部与两个第2固定刀刃17对被破碎物体进行破碎。
这样一来,与只用一侧的第1边缘部36进行破碎的情况相比,能够将被破碎物体破碎得更细。
还有,图2所示的40是刮刀,该刮刀40在壳体15上设置多个,被夹在相邻配置的旋转刀刃体20之间,用于去除卷绕在衬垫21上的被破碎物体。
下面对如上所述构成的单轴破碎机11的动作和作用进行说明。使用这种图2所示的单轴破碎机11对被破碎物体进行破碎时,驱动驱动电动机使转子13向规定的方向旋转,同时从料斗18的供给口向收容空间S提供被破碎物体。于是,该提供的被破碎物体由旋转的转子13的表面上设置的多个旋转刀刃14向门32一侧移送,被引入引导通道30内。
借助于此,能够将被破碎物体夹入转子13的表面上设置的多个旋转刀刃14与多个第1固定刀刃16和第2固定刀刃17之间,依序对该被破碎物体进行剪切破碎。这时例如操作者使推料器19动作,将被破碎物体按压在门32上时,旋转刀刃14与第1固定刀刃16和第2固定刀刃17能够将被破碎物体咬住使其不脱落,借助于此,能够更可靠地对被破碎物体进行破碎。
然后,破碎过的被破碎物体的破碎片q由多个旋转刀刃14的刀刃部旋转移送,落在网筛27上。破碎片q比形成多个孔网筛27的各孔小的情况下,破碎片q通过这些孔后落在输送装置上,由该输送装置输送到下一工序。
但是,在破碎片q比形成于网筛27的各孔大的情况下,破碎片q滞留于转子13与网筛27之间,因此被各旋转刀刃14推送,返回收容空间S内。
然后,如图1和图6(a)所示,在转子13的表面上,具有旋转刀刃14在转子13的周方向的大约180度的规定范围,而且在转子13的全长的范围没有设置的非破碎区域24,因此在从料斗18提供例如大型被破碎物体或PET塑料瓶那样的圆筒形被破碎物体时,能够用转子13表面上的非破碎区域24抓住被破碎物体。也就是说,可以使被破碎物体不保持跨在转子13的周方向的相邻的旋转刀刃14上的状态。借助于此,能够加大旋转刀刃14与第1固定刀刃16和第2固定刀刃17咬入大型的被破碎物体和PET塑料瓶等圆筒状被破碎物体的咬入量(咬入深度),旋转刀刃14与第1固定刀刃16和第2固定刀刃17能够可靠地咬入这些被破碎物体并将其破碎。
从而,能够使用廉价、小型的单轴破碎机11对这样的大型被破碎物体和PET塑料瓶等圆筒状被破碎物体可靠地进行破碎。
又如图6(a)、图6(b)所示,在破碎区域23,在转子13的同一圆周上设置3个(也可以设置3个~5个)旋转刀刃14,非破碎区域24形成于转子13的同一圆周上大约180度(也可以是120度~220度)的范围。
通过这样在破碎区域23在转子13的同一圆周上设置3个(3~5个)旋转刀刃14,可以加大同一圆周上设置的旋转刀刃14的间隔,旋转刀刃14容易深深咬住粗大垃圾之类的大型被破碎物体,有效地进行破碎。
在这里,设置的旋转刀刃14如果是两个以下,则不能够得到足够的处理能力。而如果旋转刀刃14为6个以上,则旋转刀刃14难于深深咬住大型被处理物体,不能够有效地进行破碎,而且还会增加旋转刀刃14的成本。
而且,通过在转子13的同一圆周上大约180度(120度~220度)的范围形成非破碎区域24,能够用转子13的大约一半的表面的非破碎区域24可靠地抓住大型被破碎物体。
还有,如果在转子13的同一圆周上每隔大约90度(圆周的4等分的各位置上)设置3个旋转刀刃14,能够在转子13的同一圆周上的约180度的范围上形成非破碎区域24;而如果每隔大约72度(圆周的5等分的各位置上)设置3个旋转刀刃,则能够在转子13的同一圆周上的约220度的范围上形成非破碎区域24。而如果每隔大约60度(圆周的6等分的各位置上)设置5个旋转刀刃,则能够在转子13的同一圆周上的约120度的范围上形成非破碎区域24。而且除了上述各非破碎区域外,形成破碎区域23。
上述实施形态中,如图7(a)、图7(b)所示,使旋转刀刃体20与衬垫21交互重叠形成转子13,但是也可以代之以利用中空圆筒或实心圆柱体形成转子,在该转子的表面上利用螺栓安装多个旋转刀刃14。
而且在上述实施形态中,将图8所示的第1固定刀刃16与图9所示的第2固定刀刃17交替配置,用螺栓分别将其装卸自如地安装于壳体15,但是也可以代之以将第1固定刀刃16和第2固定刀刃17这些刀刃形成为一整体,或将该形成为一整体的构件分割为多个部分,作为分割型构件形成,用螺栓装卸自如地安装于壳体15。
又,在上述实施形态中,如图2所示,在旋转刀刃体20的外周部的非破碎区域24设置槽部31,但是也可以代之以在旋转刀刃体20的外周部的破碎区域23设置槽部31,也可以在双方的各区域设置。而且设置一个槽部31,但是也可以设置两个以上。
而且在本实施形态中,虽然举出了将本发明使用于单轴破碎机11的例子,但是也可以代之以将本发明使用于双轴破碎机(未图示)。
这种双轴破碎机分别具备以各自旋转轴为中心旋转的第1转子和第2转子,该第1转子和第2转子各自的表面上分别设置多个旋转刀刃,在设置于第1转子上的多个旋转刀刃与设置于第2转子上的多个旋转刀刃之间对被破碎物体进行剪切破碎。
该第1转子是与图1~图4所示的上述实施形态的转子13相同的转子,与上述实施形态一样,在表面上设置多个旋转刀刃14,在该表面上设置破碎区域23和非破碎区域24。第2转子为与第1转子左右对称的形状。
如果采用该双轴破碎机,通过使第1转子和第2转子向将被破碎物体拉入该两个转子之间的方向旋转,能够将被破碎物体夹入第1转子的旋转刀刃与第2转子的旋转刀刃之间,依序对该被破碎物体进行剪切破碎。而且第1转子和第2转子的各自的表面具有旋转刀刃在各转子的周方向的规定范围,而且在各转子的轴方向的范围没有设置的非破碎区域,因此与上述实施形态一样,在提供例如大型的被破碎物体或PET塑料瓶那样的圆筒形被破碎物体时能够在第1转子和(或)第2转子的表面上的非破碎区域抓住被破碎物体。也就是说,被破碎物体不会维持跨在第1转子和(或)第2转子的周方向的相邻的旋转刀刃上的状态。借助于此,能够加大旋转刀刃对大型被破碎物体和PET塑料瓶等圆筒状被破碎物体的咬入量(咬入深度),旋转刀刃能够可靠地咬入这些被破碎物体并进行破碎。而且能够发挥比单轴破碎机大的破碎处理能力。
工业应用性
如上所述,本发明的单轴破碎机和双轴破碎机,对包括例如家庭的粗大垃圾的大型被破碎物体和PET塑料瓶等圆筒状被破碎物体,旋转刀刃能够以大咬入量(咬入深度)咬入,具有能够以较高效率进行破碎的优异效果,这样的单轴破碎机和双轴破碎机是适用的。
Claims (10)
1.一种单轴破碎机,具备以旋转轴为中心旋转的转子、设置于该转子的表面上的多个旋转刀刃、以及设置于固定部的固定刀刃,在所述固定刀刃与所述多个旋转刀刃之间对被破碎物体进行剪切破碎,
其中,所述转子的表面具有破碎区域,即所述多个旋转刀刃在所述转子的周方向的规定范围内不均匀分布的区域,以及在所述转子的轴方向的范围设置的区域、并具有非破碎区域,即所述旋转刀刃在所述转子的周方向的规定范围内的区域,以及不在所述转子的轴方向的范围设置的区域。
2.根据权利要求1所述的单轴破碎机,其特征在于,
在所述破碎区域,将3~5个所述旋转刀刃设置于所述转子的同一圆周上,
所述非破碎区域在所述转子的同一圆周上形成于120度~220度的范围。
3.根据权利要求1或2所述的单轴破碎机,其特征在于,
在所述旋转刀刃与所述固定刀刃啮合的位置的上方,形成引导被破碎物体的引导通道,
所述引导通道利用所述转子的断面为圆弧状的倾斜表面和所述固定刀刃的倾斜刀刃面形成越是向下方前头越细的形状。
4.根据权利要求1所述的单轴破碎机,其特征在于,还具备能够将进入所述引导通道或其近旁的被破碎物体推压在壳体上的推料器。
5.根据权利要求1所述的单轴破碎机,其特征在于,在利用所述推料器将被破碎物体推压于其上的壳体的部分,设置在向着所述固定刀刃的方向上延伸的凸条,该凸条的顶部的至少一部分与所述旋转刀刃的前端部相对地配置。
6.根据权利要求4所述的单轴破碎机,其特征在于,所述利用所述推料器推压被破碎物体于其上的壳体的部分由门形成,该门是能够开闭的可排出与被破碎物体一起提供的异物的排出口的门。
7.根据权利要求1所述的单轴破碎机,其特征在于,在外周部设置多个所述旋转刀刃,而且在该外周部形成槽部的板状的旋转刀刃体与外径比该旋转刀刃体小的板状衬垫在轴方向上交替配置,
形成于所述旋转刀刃体的槽部的底与所述衬垫的外周面大致一致地形成。
8.根据权利要求1所述的单轴破碎机,其特征在于,所述多个旋转刀刃的各旋转刀刃,具有与所述固定刀刃啮合的两侧的第1边缘部和第2边缘部,使一侧的所述第1边缘部与所述固定刀刃之间的第1间隙比另一侧的所述第2边缘部与所述固定刀刃之间的第2间隙小,利用所述第1边缘部与所述固定刀刃破碎被破碎物体,并且能够从所述第2间隙排出被破碎物体的破碎片。
9.根据权利要求1所述的单轴破碎机,其特征在于,所述固定刀刃由并排配置于所述转子的轴方向上的多个固定刀刃构成,各固定刀刃可装卸自如地分别用螺栓安装于壳体上。
10.一种双轴破碎机,具备以各自的旋转轴为中心旋转的第1转子和第2转子,在所述第1转子和第2转子各自的表面上分别设置多个旋转刀刃,在所述第1转子上设置的多个旋转刀刃与所述第2转子上设置的多个旋转刀刃之间对被破碎物体进行剪切破碎,
其中,所述第1转子和第2转子各自的表面具有破碎区域,即所述多个旋转刀刃在所述转子的周方向的规定范围内不均匀分布的区域,以及在所述各转子的轴方向的范围设置的区域、并具有非破碎区域,即所述旋转刀刃在所述转子的周方向的规定范围内的区域,以及不在所述各转子的轴方向的范围设置的区域。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010104152A JP5081945B2 (ja) | 2010-04-28 | 2010-04-28 | 一軸破砕機 |
| JP2010-104152 | 2010-04-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102233297A true CN102233297A (zh) | 2011-11-09 |
| CN102233297B CN102233297B (zh) | 2014-03-12 |
Family
ID=44884698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201010562934.6A Active CN102233297B (zh) | 2010-04-28 | 2010-11-29 | 单轴破碎机 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP5081945B2 (zh) |
| CN (1) | CN102233297B (zh) |
| HK (1) | HK1161858A1 (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103949324A (zh) * | 2014-04-23 | 2014-07-30 | 张家港大塚化学有限公司 | 低噪音的原料粉碎装置 |
| CN105363528A (zh) * | 2015-10-26 | 2016-03-02 | 江苏瑞赛克环保设备科技股份有限公司 | 一种单轴撕碎机 |
| CN105435921A (zh) * | 2016-01-06 | 2016-03-30 | 河北华明木塑制品有限公司 | 一种单齿辊破碎机 |
| CN107115934A (zh) * | 2016-10-26 | 2017-09-01 | 宁波意菲特机械制造有限公司 | 双端交互粉碎的高效撕碎机 |
| CN111841809A (zh) * | 2020-07-27 | 2020-10-30 | 许昌学院 | 一种电子信息存储设备用环保型销毁设备 |
| CN111904298A (zh) * | 2019-05-08 | 2020-11-10 | 珍巴多工业股份有限公司 | 研磨装置 |
| CN114786818A (zh) * | 2019-12-19 | 2022-07-22 | 株式会社赫力斯 | 单轴型粉碎装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5702266B2 (ja) * | 2011-11-15 | 2015-04-15 | テラル株式会社 | 破砕装置及びこれを利用した切屑搬送装置 |
| JP6109717B2 (ja) * | 2013-11-12 | 2017-04-05 | アイシン・エーアイ株式会社 | 切り粉破砕装置、および切り粉破砕刃 |
| CN103934073B (zh) * | 2014-03-31 | 2015-12-30 | 苏州中塑再生机械有限公司 | 塑料撕碎机 |
| CN107413477B (zh) * | 2017-08-11 | 2019-06-18 | 合肥工业大学 | 废弃液晶面板剪切破碎机 |
| CN109013643B (zh) * | 2018-07-16 | 2020-02-28 | 黑龙江兰德超声科技股份有限公司 | 农村垃圾处理用低温热解处理装置 |
| CN110252482B (zh) * | 2019-06-21 | 2024-02-23 | 中山斯瑞德环保科技有限公司 | 一种螺旋破碎机 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07845A (ja) * | 1993-06-17 | 1995-01-06 | Kinki:Kk | 二軸剪断式破砕装置 |
| JPH0957138A (ja) * | 1995-08-25 | 1997-03-04 | Kubota Corp | 一軸破砕機 |
| JPH10263427A (ja) * | 1997-03-24 | 1998-10-06 | Kawasaki Heavy Ind Ltd | 2軸剪断型破砕機 |
| US5906322A (en) * | 1996-08-29 | 1999-05-25 | Kabushiki Kaisha Harmo Souken | Crusher and movable section for the same |
| JP2008264634A (ja) * | 2007-04-17 | 2008-11-06 | Alphatek Co Ltd | 回転破砕刃装置および被破砕物処理装置 |
| JP2009195909A (ja) * | 2009-05-07 | 2009-09-03 | Matsui Mfg Co | 粉砕機 |
| CN101549315A (zh) * | 2009-05-09 | 2009-10-07 | 江苏全能机械设备有限公司 | 一种垃圾破碎机 |
| JP2010000431A (ja) * | 2008-06-19 | 2010-01-07 | Osaka N Ii D Mach Kk | 開梱機 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06238663A (ja) * | 1993-02-22 | 1994-08-30 | Hitachi Chem Co Ltd | 粉砕装置 |
-
2010
- 2010-04-28 JP JP2010104152A patent/JP5081945B2/ja not_active Expired - Fee Related
- 2010-11-29 CN CN201010562934.6A patent/CN102233297B/zh active Active
-
2012
- 2012-02-23 HK HK12101836.2A patent/HK1161858A1/zh unknown
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07845A (ja) * | 1993-06-17 | 1995-01-06 | Kinki:Kk | 二軸剪断式破砕装置 |
| JPH0957138A (ja) * | 1995-08-25 | 1997-03-04 | Kubota Corp | 一軸破砕機 |
| US5906322A (en) * | 1996-08-29 | 1999-05-25 | Kabushiki Kaisha Harmo Souken | Crusher and movable section for the same |
| JPH10263427A (ja) * | 1997-03-24 | 1998-10-06 | Kawasaki Heavy Ind Ltd | 2軸剪断型破砕機 |
| JP2008264634A (ja) * | 2007-04-17 | 2008-11-06 | Alphatek Co Ltd | 回転破砕刃装置および被破砕物処理装置 |
| JP2010000431A (ja) * | 2008-06-19 | 2010-01-07 | Osaka N Ii D Mach Kk | 開梱機 |
| JP2009195909A (ja) * | 2009-05-07 | 2009-09-03 | Matsui Mfg Co | 粉砕機 |
| CN101549315A (zh) * | 2009-05-09 | 2009-10-07 | 江苏全能机械设备有限公司 | 一种垃圾破碎机 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103949324A (zh) * | 2014-04-23 | 2014-07-30 | 张家港大塚化学有限公司 | 低噪音的原料粉碎装置 |
| CN105363528A (zh) * | 2015-10-26 | 2016-03-02 | 江苏瑞赛克环保设备科技股份有限公司 | 一种单轴撕碎机 |
| CN105435921A (zh) * | 2016-01-06 | 2016-03-30 | 河北华明木塑制品有限公司 | 一种单齿辊破碎机 |
| CN107115934A (zh) * | 2016-10-26 | 2017-09-01 | 宁波意菲特机械制造有限公司 | 双端交互粉碎的高效撕碎机 |
| CN107115934B (zh) * | 2016-10-26 | 2022-09-20 | 宁波意菲特机械制造有限公司 | 双端交互粉碎的高效撕碎机 |
| CN111904298A (zh) * | 2019-05-08 | 2020-11-10 | 珍巴多工业股份有限公司 | 研磨装置 |
| CN114786818A (zh) * | 2019-12-19 | 2022-07-22 | 株式会社赫力斯 | 单轴型粉碎装置 |
| CN114786818B (zh) * | 2019-12-19 | 2023-12-01 | 株式会社赫力斯 | 单轴型粉碎装置 |
| CN111841809A (zh) * | 2020-07-27 | 2020-10-30 | 许昌学院 | 一种电子信息存储设备用环保型销毁设备 |
| CN111841809B (zh) * | 2020-07-27 | 2021-08-20 | 许昌学院 | 一种电子信息存储设备用环保型销毁设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102233297B (zh) | 2014-03-12 |
| JP5081945B2 (ja) | 2012-11-28 |
| HK1161858A1 (zh) | 2012-08-10 |
| JP2011230077A (ja) | 2011-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102233297B (zh) | 单轴破碎机 | |
| US10857513B2 (en) | Biomass granulator | |
| CN202356391U (zh) | 餐厨垃圾破碎分离装置 | |
| CN102698845B (zh) | 卧式碎浆机 | |
| CN107310075A (zh) | 一种塑料原料生产用粉碎机 | |
| KR20160107594A (ko) | 폐기물 파쇄장치 | |
| CN202479013U (zh) | 多轴管道破碎机 | |
| CN107614109B (zh) | 破碎机 | |
| CN2882790Y (zh) | 纤维垃圾粉碎机 | |
| CN110917995A (zh) | 一种制粒机 | |
| CN110756294A (zh) | 一种出料顺畅的高效型半湿物料粉碎机 | |
| CN203853114U (zh) | 一种卧式双环链精细粉碎机 | |
| CN116273313A (zh) | 一种固态油气研究用的破碎装置 | |
| RU2511999C2 (ru) | Вскрыватель тюков для энергетической установки на биомассе | |
| CN201658964U (zh) | 对辊式造粒机破块装置 | |
| JP4835675B2 (ja) | 粉砕装置 | |
| CN203916817U (zh) | 垃圾料处理设备 | |
| CN113996405A (zh) | 一种粉碎装置及其粉碎方法 | |
| JP2003260378A5 (zh) | ||
| CN211726084U (zh) | 一种碳酸钙摆锤式三级破碎系统 | |
| CN105618214B (zh) | 一种用于阶梯式螺旋运输破碎设备的环形破碎装置 | |
| JP4590232B2 (ja) | 脱水ケーキ粉砕機 | |
| CN219816607U (zh) | 粉碎机出料仓除尘结构 | |
| CN117283760B (zh) | 一种用于废旧轮胎的破碎装置 | |
| CN215140662U (zh) | 四轴撕碎机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: DE Ref document number: 1161858 Country of ref document: HK |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| REG | Reference to a national code |
Ref country code: HK Ref legal event code: GR Ref document number: 1161858 Country of ref document: HK |