CN100515817C - 在前车辆的跟踪巡航控制系统和方法 - Google Patents
在前车辆的跟踪巡航控制系统和方法 Download PDFInfo
- Publication number
- CN100515817C CN100515817C CNB2005100980354A CN200510098035A CN100515817C CN 100515817 C CN100515817 C CN 100515817C CN B2005100980354 A CNB2005100980354 A CN B2005100980354A CN 200510098035 A CN200510098035 A CN 200510098035A CN 100515817 C CN100515817 C CN 100515817C
- Authority
- CN
- China
- Prior art keywords
- following cruise
- master mode
- speed
- preceding vehicle
- cruise control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0008—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including means for detecting potential obstacles in vehicle path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/05—Type of road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
Abstract
本发明公开了一种在前车辆跟踪巡航控制,其可以在车速从低速区变到高速区且已设置了设定车速时,从低速跟踪巡航控制模式自动切换到高速跟踪巡航控制模式。可选地,该在前车辆跟踪巡航控制系统被设定成当车速从低速区变为高速区时,且已在存储器部分中存储了表示已将跟踪巡航控制模式从低速跟踪巡航控制模式变为高速跟踪巡航控制模式的模式切换操作历史时,自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
Description
技术领域
本发明涉及一种在前车辆跟踪巡航控制系统。
背景技术
日本公开的专利公报No.2002-234358公开了一种在整个车速范围(0至100km/h)内的传统在前车辆跟踪巡航控制系统,其中所执行的在前车辆跟踪巡航控制(即,跟踪巡航控制)被分成多个车速区。该传统在前车辆跟踪巡航控制系统被设计成可执行跟踪巡航控制,从而使主车辆以对应于该主车辆行驶的车速区的方式跟踪在前车辆。
考虑到上述内容,对于本领域技术人员来说从上述公开内容中可明显看出需要改进在前车辆跟踪巡航控制系统。本发明解决了技术上的这种需要以及其它需要,本领域技术人员从本文公开的内容可理解到。
发明内容
已发现在上述传统的在前车辆跟踪巡航控制系统中,为了将在前车辆跟踪巡航控制从低速区切换到高速区必须要操作一规定操纵元件(例如一开关)。因此,当主车辆前方的在前车辆加速而该在前车辆跟踪巡航控制系统执行低速区的跟踪巡航控制时,跟踪巡航控制无法继续进行,除非驾驶员操作规定操纵元件。这对于驾驶员来说有些麻烦,因为他或她必须操作该操纵元件来继续利用高速区的跟踪巡航控制。
因此,本发明的一个目的是提供一种在前车辆跟踪巡航控制系统,如果因为主车辆之前已经经历过高速区的巡航控制模式,所以从低速区到高速区进行自动切换就不成问题了,则该系统通过使从低速区到高速区的切换不再用操作开关来改善切换操作的方便性。
为了实现上述目的以及本发明的其它目的,提供了一种在前车辆跟踪巡航控制系统,其基本上包括车速检测部分、在前车辆检测部分、和跟踪巡航控制部分。该车速检测部分被设定并布置成检测主车辆的车速。该在前车辆检测部分被设定并布置成检测在主车辆前方的在前车辆。该跟踪巡航控制部分被设定并布置成基于驱动条件选择性执行高速区内的高速跟踪巡航控制模式和低速区内的低速跟踪巡航控制模式之一,并在指示在先执行过高速跟踪巡航控制模式的自动模式切换条件满足时并且在车速从低速区向高速区变化时,自动从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换。
为了实现上述目的以及本发明的其它目的,提供一种在前车辆跟踪巡航控制方法,包括:检测主车辆的车速;检测在主车辆前面的在前车辆;基于驱动条件选择性执行高速区内的高速跟踪巡航控制模式和低速区内的低速跟踪巡航控制模式其中之一;以及当表示先前执行过高速跟踪巡航控制模式的自动模式切换条件满足时且在车速从低速区向高速区改变时,自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式
本领域技术人员可以从下面结合附图公开本发明优选实施例的详细描述中可以理解到本发明的上述及其它目的、特征、内容和优点。
附图说明
现在参考构成原始公开文本一部分的附图:
图1是一个方框图,示出了根据本发明优选实施例的在前车辆跟踪巡航控制系统的组成特征;
图2是主车辆方向盘部分的示意图,示出了根据本发明优选实施例的在前车辆跟踪巡航控制系统的多个操纵元件的位置安排;
图3是一个流程图,示出了根据本发明优选实施例的在前车辆跟踪巡航控制系统所执行的在前车辆跟踪巡航控制过程;
图4是根据本发明优选实施例的在前车辆跟踪巡航控制系统中执行的接续图3的在前车辆跟踪巡航控制过程的流程图;
图5是一个示意图,示出了根据本发明优选实施例的在前车辆跟踪巡航控制系统在高速跟踪巡航控制模式期间其显示单元上显示的图像示例;
图6是一个示意图,示出了根据本发明优选实施例的在前车辆跟踪巡航控制系统在低速跟踪巡航控制模式期间其显示单元上显示的图像示例;
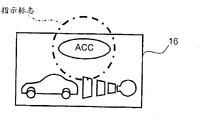
图7是一示意图,示出了根据本发明优选实施例的处于自动切换就绪状态的在前车辆跟踪巡航控制系统的显示单元所显示的图像示例,该自动切换就绪状态下,在前车辆跟踪巡航控制系统已准备好从低速跟踪巡航控制模式自动切换到高速跟踪巡航控制模式。
具体实施方式
现在将参考附图解释选出的本发明优选实施例。本领域技术人员很容易从本文公开的内容中理解到下文关于本发明实施例地说明只是用来描述,而不是用来限制本发明,本发明的范围由所附权利要求及其等效物来确定的。
在根据本发明第一实施例的在前车辆跟踪巡航控制系统中,将执行在前车辆跟踪巡航控制(即跟踪巡航控制)的整个车速范围分为两个区,即,低速区和高速区。该在前车辆巡航控制系统被设计成可选择性地执行低速区的跟踪巡航控制模式(下文称为“低速跟踪巡航控制模式”)和高速区的跟踪巡航控制模式(下文称为“高速跟踪巡航控制模式”),从而在这个车速范围内的所有速度区中均能执行跟踪巡航控制。本文所用的“这个车速范围”是指从执行跟踪巡航控制的最小车速到执行跟踪巡航控制的最大车速的几乎这个车速范围。例如,这个车速范围的最小车速设置为0公里/小时或一个非常低的速度(如,10公里/小时),这个车速范围的最大车速设置为法定速度极限(如,100公里/小时)或一个更高的速度。
在该在前车辆跟踪巡航控制系统中,低速跟踪巡航控制模式用在低速区中,该低速区是在从执行在前车辆跟踪巡航控制的最小车速(在第一实施例中是10公里/小时)到该低速跟踪巡航控制模式的速度上限(在第一实施例中是40公里/小时)范围内。在低速跟踪巡航控制模式中,在前车辆跟踪巡航控制系统被设计成执行跟踪巡航控制,从而当在安装有巡航控制系统的车辆(下文称“主车辆”)前方检测到在前车辆时,使主车辆跟随在前车辆同时保持预定的跟踪距离,如果未在主车辆前检测到在前车辆时,则终止该跟踪巡航控制。
另一方面,高速跟踪巡航控制模式也称作自适应巡航控制(ACC)模式,用于从高速跟踪巡航控制模式的速度下限(如在第一实施例中为35公里/小时)到整个车速范围的最大车速(如在第一实施例中为110公里/小时)范围内的高速区中。在该高速跟踪巡航控制模式中,在前车辆跟踪巡航控制系统被设定成可执行在前车辆跟踪巡航控制,其中根据是否检测到在前车辆来执行匀速巡航控制或跟踪巡航控制其中之一。更具体地说,该在前车辆跟踪巡航控制系统被设定成可执行匀速巡航控制,使得当在主车辆前方未检测到在前车辆时,使主车辆以高速跟踪巡航控制模式的车辆巡航速度(下文称为“设定车速”)在匀速状态下行驶,当检测到在前车辆时,执行跟踪巡航控制,从而使主车辆跟踪在前车辆同时保持预定跟踪距离(第一规定跟踪距离)。
主车辆驾驶员可以将该设定车速设置成从高速跟踪巡航控制模式的下限速度(在该优选实施例中为35公里/小时)到执行该在前车辆跟踪巡航控制的最大车速(在该优选实施例中为110公里/小时)之间的任意所需速度。这个优选实施例提出了一个例子,其中低速跟踪巡航控制模式的速度上限是40公里/小时,高速跟踪巡航控制模式的下限为35公里/小时,从而将执行在前车辆跟踪巡航控制的这个车速范围分为两个重叠区域,即低速区和高速区相互重叠。然而,对于本领域技术人员来说显然也可以从本文公开内容中得知能够将高速区和低速区设定成彼此不重叠。比如,将低速区设为10公里/小时到40公里/小时,将高速区设为40公里/小时到110公里/小时。
图1是一个方框图,示出了根据优选实施例的在前车辆跟踪巡航控制系统的组成部分。如图1所示,该优选实施例的在前车辆跟踪巡航控制系统具有跟踪巡航控制控制器10,该控制器10与各种传感器和开关可操作地连接,这些传感器和开关包括跟踪距离雷达1、车速传感器2、主开关3、重新开始/加速开关4(resume/accelerate)、取消开关5、设定/滑行开关6和制动开关7。该跟踪巡航控制的控制器10也与发机控制单元11、变速器控制单元12、制动控制单元13、导航系统14、VICS(车辆信息通讯系统)接收器15和显示单元16可操作地连接。
该跟踪距离雷达1被设定并布置成可在主车辆前扫略激光束,以检测在前车辆并检测主车辆与该在前车辆之间的距离(即,跟踪距离)。另外,使用毫波(milliwave)的毫波跟踪距离雷达可以用作跟踪距离雷达1,来替代激光束雷达检测跟踪距离。车速传感器2被设定并布置成可检测主车辆的行驶速度。主开关3是一个起动该在前车辆跟踪巡航控制系统的操纵元件。当主开关3接通时,给在前车辆跟踪巡航控制系统供电。重新开始/加速开关4是一个用于在设定车速与之前所用的相同时恢复该在前车辆跟踪巡航控制或者增加设定车速的操纵元件。更具体地,如果操作重新开始/加速开关4时在前车辆跟踪巡航控制未在进行中,则利用前次执行的高速跟踪巡航控制所用的高速跟踪巡航控制模式设定车速来重新开始在前车辆跟踪巡航控制。另一方面,如果操作重新开始/加速开关4时在前车辆巡航控制已经在进行中了,则增加高速跟踪巡航控制模式下的匀速巡航控制所用的设定车速。
取消开关5是一个用来取消在前车辆跟踪巡航控制的操纵元件。设定/滑行开关6是一个操纵元件,用来在在前车辆跟踪巡航控制未在进行中时起动该在前车辆跟踪巡航控制,并在在前车辆跟踪巡航控制已经在进行中时降低高速跟踪巡航控制模式下的匀速巡航控制所采用的设定车速。当操作该设定/滑行开关6同时在前车辆跟踪巡航控制未在进行中时,如果检测到在前车辆则开始在前车辆跟踪巡航控制,如果在高速区未检测到在前车辆,则通过将此时车速设置为设定车速来开始进行匀速巡航控制。如上所述,匀速巡航控制被设定成控制主车辆以高速跟踪巡航控制模式的设定车速行驶。重新开始/加速开关4、取消开关5和设定/滑行开关6优选设置在主车辆方向盘的辐条部分上,如图2所示,从而使主车辆驾驶员坐在驾驶座椅上就能操作重新开始/加速开关4、取消开关5和设定/滑行开关6。当踩下制动踏板(未示出)时制动开关7接通。
取消开关5是一个用来取消该在前车辆跟踪巡航控制的操纵元件。设定/滑行开关6是一个操纵元件,用于在未进行在前车辆跟踪巡航控制时起动该在前车辆跟踪巡航控制,而在在前车辆跟踪巡航控制已经在进行中时用来降低匀速巡航控制所采用的设定车速。当操作该设定/滑行开关6同时在前车辆跟踪巡航控制未在进行中时,如果有在前车辆则开始在前车辆跟踪巡航控制,如果没有在前车辆则用当前车速作为设定车速来开始进行匀速巡航控制。重新开始/加速开关4、取消开关5和设定/滑行开关6设置在方向盘的辐条部分上。当踩下制动踏板(未示出)时制动开关7接通。
跟踪巡航控制控制器10优选包括一个具有上述在前车辆跟踪巡航控制程序和匀速巡航控制程序的微型计算机,以控制下面所述的车辆巡航控制系统。更具体地,如图1所示,该跟踪巡航控制控制器10包括一个CPU10a、ROM(只读存储器)10b和RAM(随机存储器)10c。该跟踪巡航控制控制器10也可以包括其它传统部件,例如输入接口电路和输出接口电路等。对该跟踪巡航控制控制器10的微型计算机进行编程,以控制该在前车辆跟踪巡航控制。存储电路储存处理结果和控制程序,例如由处理器电路所运行的在前车辆跟踪巡航控制操作的处理结果及控制程序。该跟踪巡航控制的控制器10以传统方式可操作连接各种传感器和开关。该跟踪巡航控制控制器10的内置RAM 10c储存操作标志的状态及各种控制数据。该跟踪巡航控制的控制器的内置ROM 10b存储用于各种操作的各种数据和图表。根据控制程序,该跟踪巡航控制控制器10可以选择性地控制该车辆巡航控制系统的任意组件。很显然本领域技术人员从该公开内容中能够获知该跟踪巡航控制的控制器10的精确结构和算法可以是能够实现本发明功能的硬件和软件的任意组合。换句话说,在说明书及权利要求中所使用的“装置加功能”的句子包括了能够用来实现该“装置加功能”所限定的功能的任意结构或硬件和/或算法或软件。
发动机控制单元11被设计成可以进行发动机(未示出)的进气量控制、燃油喷射控制及点火正时控制,以调节发动机的输出扭矩和转速来控制主车辆的驱动力。变速器控制单元12被设计成控制主车辆自动变速器(未示出)的传动比,也就是档位。制动控制单元13被设计成通过调节制动液压力来控制主车辆的制动力。
导航装置14被设定成检测主车辆的当前位置并提供关于地图/交通方面的信息,例如主车辆正在行驶的公路的法定限速。VICS接收器15被设计成接收来自光标、无线电信号或者FM多路广播等的交通阻塞信息。显示单元16被设计成指示该在前车辆跟踪巡航控制系统的控制状态以及主车辆的巡航状态。
在本发明的优选实施例中,该跟踪巡航控制控制器10被设定成在主车辆速度降到40公里/小时或更低时,尽管该在前车辆跟踪巡航控制以高速跟踪巡航控制模式执行,也无条件地切换到低速跟踪巡航控制模式下的在前车辆跟踪巡航控制。然而,该跟踪巡航控制控制器10并非被设定成在前车辆跟踪巡航控制以低速跟踪巡航控制模式执行的同时,当主车辆速度增加到40公里/小时或更高时无条件地切换到高速跟踪巡航控制模式下的在前车辆跟踪巡航控制。在后面的情况中,除非在RAM 10c的规定地址中存储了设定车速,否则不会自动切换在前车辆跟踪巡航控制系统。当RAM 10c的规定地址中存储了设定车速时,驾驶员在当前驾驶过程中已经至少经历了一次高速跟踪巡航控制模式下的跟踪巡航控制。因而,有理由相信如果主车辆自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式,驾驶员不会感到不适。结果,在不存在自动切换到高速跟踪巡航控制模式会出现问题的原因的情况下,不需要驾驶员手动操作设定/滑行开关6就能切换到高速跟踪巡航控制模式。因而,本发明的在前车辆跟踪巡航控制系统对于将跟踪巡航控制模式从高速区切换到低速区来说更为方便。
下面将参考图3和图4所示的流程图来介绍该实施例的操作。图3和图4是描述用于执行根据该优选实施例的在前车辆跟踪巡航控制的跟踪巡航控制控制器10中所执行的控制过程的流程图。当在在前车辆跟踪巡航控制还未执行时操纵设定/滑行开关6时,该跟踪巡航控制控制器10被设定成开始执行图3和图4所示的程序。
在图3的步骤S1中,跟踪巡航控制控制器10被设定成检查车速传感器2所检测到的当前车速,并确定主车辆车速是否大于40公里/小时,即车辆是否以一个大于低速区上限车速的速度行驶。如果在步骤S1中主车辆以高速行驶,则该跟踪巡航控制控制器10被设定成转到步骤S2。在步骤S2中,跟踪巡航控制控制器10被设定成执行启动高速跟踪巡航控制模式下的在前车辆跟踪巡航控制所需的程序。另一方面,如果在步骤S1中主车辆以低速(即,在该优选实施例中小于等于40公里/小时)行驶,跟踪巡航控制控制器10被设定成进行图4的步骤S21,执行启动低速跟踪巡航控制模式下的在前车辆跟踪巡航控制所需的程序。
下面将描述启动高速跟踪巡航控制模式下的在前车辆跟踪巡航控制所需的程序。在步骤S2中,跟踪巡航控制控制器10被设定成将车速传感器2所检测到的当前车速作为高速跟踪巡航控制模式下的匀速巡航控制所用的巡航速度(也就是,“车辆设定速度“)存储到RAM 10c的规定地址中。然后在步骤S3中,跟踪巡航控制控制器10被设定成起动高速跟踪巡航控制模式下的在前车辆跟踪巡航控制。更具体地说,跟踪巡航控制控制器10被设定成执行跟踪距离控制,从而使由跟踪距离雷达1所检测到的跟踪距离符合预设目标跟踪距离,并且使主车辆跟随在前车辆。当在前车辆跟踪巡航控制系统正在执行高速跟踪巡航控制模式下的在前车辆跟踪巡航控制时,显示单元16被设定并布置成显示一个指示标志或标记,指示该在前车辆跟踪巡航控制系统处于高速跟踪巡航控制模式,如图5所示。图5示出了在设定车速为100公里/小时情况下跟踪巡航控制在高速跟踪巡航控制模式下执行时显示单元16所显示的一个图像示例。
在步骤S4中,跟踪巡航控制控制器10被设定成检查是否已经操作了取消开关5(即,取消开关5是否接通)或者是否已经踩下制动踏板且制动开关7接通。如果在步骤S4中取消开关5或制动开关7接通,则跟踪巡航控制控制器10被设定成转到步骤S5。在步骤S5中,跟踪巡航控制控制器10被设定成取消高速跟踪巡航控制模式下的在前车辆跟踪巡航控制并结束控制程序。
另一方面,如果在步骤S4中取消开关5还未被操作且制动踏板还未被踩下,跟踪巡航控制控制器10被设定成转到步骤S6,来判定是否主开关3断开。如果在步骤S6中主开关3断开,跟踪巡航控制控制器10被设定成转到步骤S7。在步骤S7中,跟踪巡航控制控制器10被设定成清除存储在RAM10c的规定地址中的设定车速,并转到步骤S5,在该步骤S5中跟踪巡航控制控制器10被设定成取消高速跟踪巡航控制模式下的在前车辆跟踪巡航控制并结束控制程序。
如果无论取消开关5还是操作主开关3都还未被操作,且制动踏板也未踩下,则跟踪巡航控制控制器10被设定成转到步骤S8,来判定跟踪距离雷达1是否已观测不到(不再检测到)在前车辆。如果不再检测在前车辆,跟踪巡航控制控制器10被设定成转到步骤S9。在步骤S9中,跟踪巡航控制控制器10被设定成执行车速控制,使得车速传感器2所检测到的车速符合存储在RAM 10c规定地址中的设定车速,并使主车辆以匀速行驶(匀速巡航控制)。
在步骤S10中,跟踪巡航控制控制器10被设定成在匀速巡航控制期间再次检查跟踪距离雷达1是否检测到在前车辆。如果检测到在车辆,跟踪巡航控制控制器10被设定成返回到步骤S3并执行跟踪距离控制,从而使跟踪距离雷达1检测到的跟踪距离符合预设目标跟踪距离,并使主车辆跟随在前车辆。另一方面,如果在步骤S10中仍未检测到在前车辆,跟踪巡航控制控制器10返回到步骤S4并重复上面刚描述的处理步骤。
如果在步骤S8中未失去在前车辆(即仍然检测到在前车辆),跟踪巡航控制控制器10被设定成转到步骤S11并检查车速传感器2检测到的当前车速是否小于或等于35公里/小时。如果在步骤S11中车速超过35公里/小时,跟踪巡航控制控制器10被设定成返回到步骤S4并重复上述处理步骤。相反,如果在步骤S11中车速等于或小于35公里/小时,跟踪巡航控制控制器10被设定成转到图4的步骤S21,由此从高速跟踪巡航控制模式切换到低速跟踪巡航控制模式。
更具体地,在步骤S21中,跟踪巡航控制控制器10被设定成执行跟踪距离控制,从而使跟踪距离雷达1检测到的跟踪距离符合预设目标跟踪距离并使主车辆用低速跟踪巡航控制模式跟随在前车辆。
如果在在前车辆跟踪巡航控制未在进行中时操作设定/滑行开关6,且在步骤S1中判定主车辆未以一个大于或等于35公里/小时的高速行驶,则跟踪巡航控制控制器10转到步骤S21,起动低速跟踪巡航控制模式下的在前车辆跟踪巡航控制。
当在前车辆跟踪巡航控制系统正在执行低速跟踪巡航控制模式下的跟踪巡航控制时,显示单元16被设定成显示如图6所示的指示标志或标识,来通知主车辆的驾驶员该在前车辆跟踪巡航控制系统处于低速跟踪巡航控制模式。尽管图5所示的指示高速跟踪巡航控制模式的标识显示设定车速(在图5中为100公里/小时),但是指示低速跟踪巡航控制模式的标识不显示设定车速,这是因为在低速跟踪巡航控制模式中设定车速不起作用。这样,驾驶员可以根据显示单元16是否显示设定车速来识别正在进行哪个跟踪巡航控制模式。
当在前车辆跟踪巡航控制系统执行低速跟踪巡航控制模式下的在前车辆跟踪巡航控制时,同时设定车速存储在RAM 10c的规定地址中(即已满足自动模式切换条件),则当车速超过40公里/小时时,在前车辆跟踪巡航控制系统被设定成自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。这里所用的“自动切换”意思为在不用驾驶员操作操纵元件(比如重新开始/加速开关4)的情况下执行从高速跟踪巡航控制模式向低速跟踪巡航控制模式的切换。因此,在显示单元16中显示图7所示的指示标志或标识,以指示驾驶员该跟踪巡航控制可以从低速跟踪巡航控制模式自动切换到高速跟踪巡航控制模式。图7所示的标识包括图6所示的低速跟踪巡航控制模式的标识,且在该标识上加上“ACC”指示标志。这样,图7所示的标识可以使驾驶员认识到在前车辆跟踪巡航控制系统正在执行低速跟踪巡航控制模式的在前车辆跟踪巡航控制,并且如果车速超过40公里/小时该在前车辆跟踪巡航控制系统已经准备好随时切换到高速跟踪巡航控制模式。
在低速跟踪巡航控制模式下的在前车辆跟踪巡航控制开始之后,跟踪巡航控制控制器10被设定成转到步骤S22,检查取消开关5或制动开关7是否接通,主开关3是否断开,以及跟踪距离雷达1是否已经失去在前车辆的踪迹。如果在步骤S22中已经操作了取消开关5、踩下了制动踏板、操作了主开关3或者已不再检测到在前车辆,则跟踪巡航控制控制器10被设定成转到步骤S23。在步骤S23中,跟踪巡航控制控制器10被设定成取消低速跟踪巡航控制模式下的在前车辆跟踪巡航控制并结束控制程序。相反,如果在步骤S22中还未操作取消开关5、未踩下制动踏板、未操作主开关3或者仍检测到在前车辆(未失去踪迹),则跟踪巡航控制控制器10被设定成转到步骤S24。
在步骤S24中,跟踪巡航控制控制器10被设定成从导航装置14以及VICS接收器15中获得关于主车辆行驶道路的道路信息。在步骤S25中,跟踪巡航控制控制器10被设定成从该道路信息中提取该路的法定限速,并判定该法定限速是否等于或小于40公里/小时。在该优选实施例中,低速跟踪巡航控制模式的速度上限被设为40公里/小时。如果主车辆所行驶的道路的法定限速小于或等于40公里/小时,跟踪巡航控制控制器10被设定成转到步骤S21,并继续执行低速跟踪巡航控制模式下的在前车辆跟踪巡航控制,这是因为根据设定车速,当主车辆行驶在法定限速小于或等于40公里/小时的道路上时,如果在前车辆跟踪巡航控制系统从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式则车速可能超过法定限速。
如果在步骤S25中确定法定限速超过40公里/小时,则跟踪巡航控制控制器10被设定成转到步骤S26,检查在RAM 10c的规定地址中是否存储了设定车速。如果在步骤S26中RAM 10c的规定地址未存储设定车速,跟踪巡航控制控制器10被设定成转到步骤S31。在步骤S31中,跟踪巡航控制控制器10被设定成判定车速传感器2检测到的当前车速是否在35公里/小时到40公里/小时的范围内(即高速区和低速区之间的重叠区域中)。如果车速处于重叠区域,跟踪巡航控制控制器10被设定成转到步骤S32,如果车速不在重叠区域,则跟踪巡航控制控制器10返回步骤S21,继续进行低速跟踪巡航控制模式下的在前车辆跟踪控制。
在步骤S32中,跟踪巡航控制控制器10被设定成判断是否已经操作了一个切换开关(例如重新开始/加速开关4),该开关设定成允许驾驶员命令在前车辆跟踪巡航控制系统切换到高速跟踪巡航控制模式。如果操作了该开关,跟踪巡航控制控制器10被设定成转到步骤S33。
在步骤S33中,跟踪巡航控制控制器10被设定成在RAM 10c的规定地址中存储一规定车速,例如40公里/小时(低速跟踪巡航控制模式的速度上限),来作为设定车速。然后,跟踪巡航控制控制器10被设定成转到步骤S4,执行高速跟踪巡航控制模式下的在前车辆跟踪巡航控制。另一方面,如果在步骤S32中判定还未操作该切换开关,则跟踪巡航控制控制器10被设定成返回到步骤S21并继续执行低速跟踪巡航控制模式下的在前车辆跟踪巡航控制。
如果在步骤S26中发现在RAM 10c规定地址中已存储了设定车速,跟踪巡航控制控制器10被设定成转到步骤S27并检查车速传感器2所检测到的当前车速是否超过40公里/小时。如果在步骤S27中车速未超过40公里/小时,跟踪巡航控制控制器10被设定成返回步骤S21并继续执行低速跟踪巡航控制模式下的在前车辆跟踪巡航控制。相反,如果在步骤S27中车速超过40公里/小时,跟踪巡航控制控制器10被设定成转到步骤S28,自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。更具体地说,在步骤S28中,跟踪巡航控制控制器10被设定成执行跟踪距离控制,使得跟踪距离雷达1检测到的跟踪距离符合预设目标跟踪距离,同时使车辆用高速跟踪巡航控制模式来跟踪在前车辆。
由于在前车辆跟踪巡航控制系统执行高速跟踪巡航控制模式下的跟踪巡航控制,显示单元16被设定成显示如图5所示的指示该在前车辆跟踪巡航控制系统处于高速跟踪巡航控制模式的指示标志。如上所述,图5示出了高速跟踪巡航控制以例如100公里/小时的设定车速执行的情况。在步骤S29中,跟踪巡航控制控制器10被设定成判断该设定车速是否超过了主车辆行驶路面的法定限速。如果在步骤S29中该设定车速超过了法定限速,则跟踪巡航控制控制器10被设定成转到步骤S30,并将车速限制为一个小于或等于法定限速的车速。然后,跟踪巡航控制控制器10被设定成返回步骤S4重复前述处理。
于是,这个优选实施例的在前车辆跟踪巡航控制系统被设定成当车速从低速区进入高速区并同时已设定了设定车速(即,在RAM 10c的规定地址中存储了设定车速)时,可自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。结果,当驾驶员在在前车辆跟踪巡航控制的当前控制循环中已经经历了一次高速跟踪巡航控制模式下的跟踪巡航控制,且自动切换到高速跟踪巡航控制模式的问题不存在时,在前车辆跟踪巡航控制系统被设定成不需要驾驶员通过操作设定/滑行开关6手动改变模式,就可以自动切换到高速跟踪巡航控制模式。这样,该在前车辆跟踪巡航控制系统相对于低速跟踪巡航控制模式和高速跟踪巡航控制模式之间的切换(改变)来说可以更方便。
对于该优选实施例,在前车辆跟踪巡航控制系统被设定成检测主车辆行驶路面的法定限速,并且如果主车辆行驶路面的法定限速小于或等于低速区的速度上限(即,在该实施例中为40公里/小时),则在前车辆跟踪巡航控制系统不会自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。因此,可以防止主车辆在跟随在前车辆同时加速到超过法定限速的情况的出现。
此外,对于该优选实施例,在前车辆跟踪巡航控制系统被设定成检测主车辆行驶路面法定限速,并且如果在跟踪巡航控制模式从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式之后设定车速超过法定限速,则将该设定车速限定为该法定限速。因此,可以防止出现主车辆在跟随在前车辆的同时加速超过法定限速的情况。
此外,对于该优选实施例的在前车辆跟踪巡航控制系统,当该在前车辆跟踪巡航控制系统自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式时通知驾驶员。因此,驾驶员可以注意到跟踪巡航控制模式已经被切换(改变)了,而且如果主车辆为了跟踪在前车辆而从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式之后自动加速,驾驶员也不会感到不适。
同样,对于该优选实施例的在前车辆跟踪巡航控制系统,当该在前车辆跟踪巡航控制系统处于在前车辆跟踪巡航控制系统可以从低速跟踪巡航控制模式自动切换到高速跟踪巡航控制模式的状态中时通知驾驶员。因此,驾驶员可以注意到模式可以自动切换到高速跟踪巡航控制模式,并且在主车辆为了跟随在前车辆而模式自动切换之后自动加速时,驾驶员也不会感到不适。
在上述优选实施例中,车速传感器2优选对应于本发明的车速检测部分。跟踪距离雷达1优选对应于本发明的在前车辆检测部分。跟踪巡航控制控制器10优选对应于本发明的跟踪巡航控制部分、匀速巡航速度控制部分、模式切换部分及车速限制部分。导航单元14和VICS接收器15优选对应于本发明的信息检测部分。显示单元16优选对应于本发明的报告部分。设定/滑行开关6优选对应于本发明的模式切换操纵元件。RAM 10c优选对应于本发明的存储器部分。本发明的组成部件并不限于本文所描述的那些,只要不损失本发明的特征功能即可。
尽管这里描述的优选实施例给出了根据本发明的在前车辆跟踪巡航控制系统应用到用发动机作为驱动源的汽车上的示例,但本发明也可应用在除了发动机动力车辆之外的混合动力车辆以及电动车辆上。
尽管这里描述的优选实施例给出了将执行该在前车辆跟踪巡航控制的整个车速范围分成两个车速区,即高速区(高速跟踪巡航控制模式)和低速区(低速跟踪巡航控制模式)的示例,但也可以将全车速区域分成三个或多个车速区。此外,本发明并不限制于优选实施例所提到的关于执行在前车辆跟踪巡航控制的最大车速及最小车速、以及速度上限、速度下限、高、低速跟随巡航控制模式的设定车速的特定数值。
同样,尽管这里描述的优选实施例给出了在已设置了设定车速(即,当设定车速已储存在RAM 10c的规定地址中)且当车速从低速区进入高速区时将在前车辆跟踪巡航控制系统设定成能自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式的示例,但本发明并不仅限于这种结构。也可以接受的是,将在前车辆跟踪巡航控制系统设定成当驾驶员执行一个在低速跟踪巡航控制模式与高速跟踪巡航控制模式之间改变跟踪巡航控制模式的操作时,将发生模式切换操作的事实,即模式切换操作历史,储存在例如RAM 10c中。然后,当车速从低速区进入高速区且已在RAM10c中储存了模式切换操作历史时,则将跟踪巡航控制模式设定成从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。在这种情况下,将图4的步骤S26替换成步骤S26’,在该步骤中跟踪巡航控制控制器10被设定成判断是否在RAM 10c中储存了模式切换操作历史。换句话说,本发明的在前车辆跟踪巡航控制系统可以被设计成当RAM 10c中储存了模式切换操作历史时即满足了自动模式切换条件。
于是,本发明的在前车辆跟踪巡航控制被设定成当车速从低速区进入高速区并同时已设置了设定车速时,将在前车辆跟踪巡航控制系统设定成可以自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
同样,根据本发明的在前车辆跟踪巡航控制被设定成当车速从低速区变为高速区时,同时已在存储器部分(即RAM 10c)中存储了表示已经通过操纵模式切换操作元件将跟踪巡航控制模式从低速跟踪巡航控制模式变为高速跟踪巡航控制模式的模式切换操作历史时,自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
对于本发明,当驾驶员已经经历了一次高速跟踪巡航控制模式下的跟踪巡航控制,且不存在自动切换到高速跟踪巡航控制模式出现问题的原因时,该在前车辆跟踪巡航控制系统设定成不需要驾驶员操作一个模式切换操纵元件来手动改变模式就能够自动切换到高速跟踪巡航控制模式。从而,该系统能更方便地切换(改变)跟踪巡航控制模式。
入在本文中描述上述实施例所使用的,跟踪方向术语“前、后、上、下、垂直、水平、下方和横向”及其它类似的方向术语是指配备有本发明的车辆的方向。因此,当用于描述本发明时,这些术语应当解释成是相对于配备有本发明的车辆的。
在此用来描述由一个组件、部件、设备等执行的操作或功能的属于“检测”包括不需要物理检测的一个组件、部件、设备等,而且包括确定、测量、建模、推算或计算等执行的操作或功能。
当在本文中使用的术语“设定成”描述包括硬件和/或软件的组件、部分或装置的一部分时,其包括构造和/编程以实现所需功能。而且,在权利要求中用“装置加功能”所表达的术语应当包括任何可以用来实现本发明该部分的功能的结构。
本文中使用的如“几乎”、“大约”和“接近”的程度的术语表示其所修饰的术语的合理偏差量,使得最后结果没有显著变化。例如,如果该偏差不会否定所修饰术语的含义的话,这些术语应被解释成包括所修饰术语的至少±5%的偏离量。
尽管仅选择了一些选定实施例来描述本发明,但显然在不偏离由所附权利要求限定的本发明范围的情况下本领域技术人员来从本文的公开内容中能够理解到各种变化和改型。而且,根据本发明实施例的在前描述只是用于解释说明,而不是用于限制本发明的目的,本发明是由附加的权利要及其等效物限定的。因而本发明的范围并不局限于公开的实施例。
Claims (14)
1.一种在前车辆跟踪巡航控制系统,包括:
车速检测部分,该车速检测部分被设定并布置成检测主车辆的车速;
在前车辆检测部分,该在前车辆检测部分被设定并布置成检测在主车辆前方的在前车辆;
跟踪巡航控制部分,该跟踪巡航控制部分被设定并布置成基于驱动条件选择性执行高速区内的高速跟踪巡航控制模式和低速区内的低速跟踪巡航控制模式其中之一,并且在表示先前执行过高速跟踪巡航控制模式的自动模式切换条件满足时且在车速从低速区向高速区改变时,自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
2.如权利要求1所述的在前车辆跟踪巡航控制系统,其中:
跟踪巡航控制部分进一步被设定成选择性执行以下模式之一:
高速区内的高速跟踪巡航控制模式,其中,当检测到在前车辆时,执行跟踪巡航控制,使得主车辆跟踪在前车辆同时保持第一规定跟踪距离,而在未检测到在前车辆时,执行匀速巡航控制,使得主车辆以设定车速在匀速下行驶;以及
低速区内的低速跟踪巡航控制模式,其中,在检测到在前车辆时,执行跟踪巡航控制,使得主车辆跟踪在前车辆同时保持第二规定跟踪距离,而在未检测到在前车辆时,取消跟踪巡航控制,并且
跟踪巡航控制部分进一步被设定成当已经设置了设定车速时,确定自动模式切换条件已满足。
3.如权利要求1所述的在前车辆跟踪巡航控制系统,还包括:
模式切换操作元件,该模式切换操作元件被设定并布置成发出从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换的指令;以及
存储器部分,该存储器部分被设定并布置成在模式切换操作元件被操纵以从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换时,存储从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换的模式切换操作的历史,
跟踪巡航控制部分进一步被设定成当存储器部分中已经存储了模式切换操作历史时确定自动模式切换条件已满足。
4.如权利要求1所述的在前车辆跟踪巡航控制系统,还包括:
道路信息检测部分,该道路信息检测部分被设定并布置成检测主车辆行驶道路的法定限速,
跟踪巡航控制部分进一步被设定成在道路的法定限速等于或低于低速区的速度上限时,阻止自动从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换。
5.如权利要求1所述的在前车辆跟踪巡航控制系统,还包括:
报告部分,该报告部分被设定并布置成向主车辆驾驶员报告跟踪巡航控制部分自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
6.如权利要求1所述的在前车辆跟踪巡航控制系统,还包括:
报告部分,该报告部分被设定并布置成向主车辆的驾驶员报告可以执行从低速跟踪巡航控制向高速跟踪巡航控制的自动切换。
7.如权利要求2所述的在前车辆跟踪巡航控制系统,还包括:
道路信息检测部分,该道路信息检测部分被设定并布置成检测主车辆行驶道路的法定限速,
跟踪巡航控制部分进一步被设定成在道路的法定限速等于或低于低速区的速度上限时,阻止自动从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换。
8.如权利要求2所述的在前车辆跟踪巡航控制系统,还包括:
道路信息检测部分,该道路信息检测部分被设定并布置成检测主车辆行驶道路的法定限速,
车速限制部分,该车速限制部分被设定并布置成当跟踪巡航控制部分从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换后设定车速超过法定限速时,将主车辆的车速限制为道路的法定限速。
9.如权利要求2所述的在前车辆跟踪巡航控制系统,还包括:
报告部分,该报告部分被设定并布置成向主车辆驾驶员报告跟踪巡航控制部分自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
10.如权利要求2所述的在前车辆跟踪巡航控制系统,还包括:
报告部分,该报告部分被设定并布置成向主车辆的驾驶员报告可以执行从低速跟踪巡航控制向高速跟踪巡航控制的自动切换。
11.如权利要求3所述的在前车辆跟踪巡航控制系统,还包括:
道路信息检测部分,该道路信息检测部分被设定并布置成检测主车辆行驶道路的法定限速,
跟踪巡航控制部分进一步被设定成在道路的法定限速等于或低于低速区的速度上限时,阻止自动从低速跟踪巡航控制模式向高速跟踪巡航控制模式切换。
12.如权利要求3所述的在前车辆跟踪巡航控制系统,还包括:
报告部分,该报告部分被设定并布置成向主车辆驾驶员报告跟踪巡航控制模式已经从低速跟踪巡航控制模式自动切换到高速跟踪巡航控制模式。
13.如权利要求3所述的在前车辆跟踪巡航控制系统,还包括:
报告部分,该报告部分被设定并布置成向主车辆的驾驶员报告可以执行从低速跟踪巡航控制向高速跟踪巡航控制的自动切换。
14.一种在前车辆跟踪巡航控制方法,包括:
检测主车辆的车速;
检测在主车辆前面的在前车辆;
基于驱动条件选择性执行高速区内的高速跟踪巡航控制模式和低速区内的低速跟踪巡航控制模式其中之一;以及
当表示先前执行过高速跟踪巡航控制模式的自动模式切换条件满足时且在车速从低速区向高速区改变时,自动从低速跟踪巡航控制模式切换到高速跟踪巡航控制模式。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP209971/04 | 2004-07-16 | ||
| JP2004209971A JP4453468B2 (ja) | 2004-07-16 | 2004-07-16 | 先行車追従走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1728192A CN1728192A (zh) | 2006-02-01 |
| CN100515817C true CN100515817C (zh) | 2009-07-22 |
Family
ID=35056845
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2005100980354A Expired - Fee Related CN100515817C (zh) | 2004-07-16 | 2005-07-18 | 在前车辆的跟踪巡航控制系统和方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7460946B2 (zh) |
| EP (1) | EP1616744B1 (zh) |
| JP (1) | JP4453468B2 (zh) |
| KR (1) | KR100618020B1 (zh) |
| CN (1) | CN100515817C (zh) |
| DE (1) | DE602005000709T2 (zh) |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6591168B2 (en) * | 2001-08-31 | 2003-07-08 | Intellisist, Inc. | System and method for adaptable mobile user interface |
| US20040084237A1 (en) * | 2002-05-30 | 2004-05-06 | Petrie Alfred E. | Vehicle cruise control system |
| JP4453468B2 (ja) * | 2004-07-16 | 2010-04-21 | 日産自動車株式会社 | 先行車追従走行制御装置 |
| JP2006027457A (ja) * | 2004-07-16 | 2006-02-02 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| US11351863B2 (en) | 2005-11-17 | 2022-06-07 | Invently Automotive Inc. | Vehicle power management system |
| US11370302B2 (en) | 2005-11-17 | 2022-06-28 | Invently Automotive Inc. | Electric vehicle power management system |
| US11345236B2 (en) | 2005-11-17 | 2022-05-31 | Invently Automotive Inc. | Electric vehicle power management system |
| US11186175B2 (en) | 2005-11-17 | 2021-11-30 | Invently Automotive Inc. | Vehicle power management system |
| US11207980B2 (en) | 2005-11-17 | 2021-12-28 | Invently Automotive Inc. | Vehicle power management system responsive to traffic conditions |
| US11180025B2 (en) | 2005-11-17 | 2021-11-23 | Invently Automotive Inc. | Electric vehicle power management system |
| US11285810B2 (en) | 2005-11-17 | 2022-03-29 | Invently Automotive Inc. | Vehicle power management system |
| US11214144B2 (en) | 2005-11-17 | 2022-01-04 | Invently Automotive Inc. | Electric vehicle power management system |
| JP5056220B2 (ja) * | 2006-09-29 | 2012-10-24 | 日産自動車株式会社 | 走行制御装置 |
| DE102006060554A1 (de) * | 2006-12-21 | 2008-06-26 | Bayerische Motoren Werke Ag | Lenkrad für ein Kraftfahrzeug und Kraftfahrzeug |
| US8014928B2 (en) * | 2008-06-17 | 2011-09-06 | Ford Global Technologies, Llc | Automotive slipstreaming support system |
| KR101168744B1 (ko) | 2008-12-03 | 2012-07-26 | 한국전자통신연구원 | 정속 주행 시스템 및 그 방법 |
| KR20120094365A (ko) * | 2011-02-16 | 2012-08-24 | 주식회사 만도 | 가속 제어 조절 방법 및 그 적응 순항 제어 시스템 |
| DE102011084606A1 (de) * | 2011-10-17 | 2013-04-18 | Robert Bosch Gmbh | Bestimmung einer Fahrstrategie für ein Fahrzeug |
| KR101572997B1 (ko) * | 2011-12-22 | 2015-11-30 | 스카니아 씨브이 악티에볼라그 | 기준 값 결정 시에 모드 선택에 관한 모듈 및 방법 |
| US20130219294A1 (en) * | 2012-02-16 | 2013-08-22 | GM Global Technology Operations LLC | Team-Oriented Human-Vehicle Interface For Adaptive Cruise Control System And Methods For Using Same |
| KR101997430B1 (ko) * | 2012-11-08 | 2019-10-01 | 현대모비스 주식회사 | 차량의 scc 시스템 및 그 제어방법 |
| KR101997431B1 (ko) * | 2012-11-15 | 2019-10-01 | 현대모비스 주식회사 | 선행차량 추종 속도 재설정 장치 및 방법 |
| DE102013200391B4 (de) * | 2013-01-14 | 2022-02-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur adaptiven Geschwindigkeitsregelung eines Kraftfahrzeugs mit manuellem Schaltgetriebe |
| US9568082B2 (en) | 2014-01-30 | 2017-02-14 | Byd Company Limited | Power transmission system for vehicle and vehicle comprising the same |
| WO2015113416A1 (en) | 2014-01-30 | 2015-08-06 | Byd Company Limited | Power transmission system for vehicle and vehicle comprising the same |
| DK3100886T3 (da) | 2014-01-30 | 2022-06-27 | Byd Co Ltd | Køretøj og kraftoverføringssystem deraf |
| WO2015113415A1 (en) | 2014-01-30 | 2015-08-06 | Byd Company Limited | Power transmission system for vehicle and vehicle comprising the same |
| CN104276031B (zh) | 2014-01-30 | 2016-01-13 | 比亚迪股份有限公司 | 车辆及其驱动控制方法 |
| CN104279311B (zh) | 2014-01-30 | 2015-11-25 | 比亚迪股份有限公司 | 车辆中同步器的控制方法及车辆 |
| CN104276176B (zh) * | 2014-01-30 | 2015-09-02 | 比亚迪股份有限公司 | 车辆及车辆的巡航控制方法 |
| WO2015113411A1 (en) | 2014-01-30 | 2015-08-06 | Byd Company Limited | Power transmission system for vehicle and vehicle comprising the same |
| WO2015113412A1 (en) | 2014-01-30 | 2015-08-06 | Byd Company Limited | Power transmission system for vehicle and vehicle comprising the same |
| WO2016037469A1 (en) | 2014-09-10 | 2016-03-17 | Byd Company Limited | Transmission unit, power transmission system and vehicle comprising the same |
| WO2016037470A1 (en) | 2014-09-10 | 2016-03-17 | Byd Company Limited | Power transmission system and vehicle comprising the same |
| EP2995488B1 (en) | 2014-09-10 | 2018-12-26 | BYD Company Limited | Power transmission system and vehicle comprising the same |
| CN104608760B (zh) | 2014-10-20 | 2016-05-25 | 比亚迪股份有限公司 | 混合动力汽车及其换挡控制方法、动力传动系统 |
| JP6356585B2 (ja) * | 2014-11-28 | 2018-07-11 | 株式会社デンソー | 車両の走行制御装置 |
| US20160297438A1 (en) * | 2015-04-13 | 2016-10-13 | Mando Corporation | Active cruise control system in vehicle and method thereof |
| WO2017017725A1 (ja) * | 2015-07-24 | 2017-02-02 | 三菱電機株式会社 | 車両定速走行制御装置及び車両定速走行制御方法及び車両定速走行制御プログラム |
| EP3423326B1 (en) * | 2016-03-03 | 2019-08-21 | Volvo Truck Corporation | A vehicle with autonomous driving capability |
| US10059330B2 (en) | 2016-09-22 | 2018-08-28 | Toyota Motor Engineering & Manufacturing North America, Inc. | Drafting detection and vehicle operation optimization system |
| DE102017216215A1 (de) * | 2017-09-13 | 2019-03-14 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zum Anzeigen von Beschleunigungen vorausfahrender Fahrzeuge in einem Fahrzeug |
| CN108688467B (zh) * | 2018-07-18 | 2021-01-29 | 曾俊 | 一种机动车限速方法、装置、计算机设备及存储介质 |
| CN113212436A (zh) * | 2021-06-23 | 2021-08-06 | 蔚来汽车科技(安徽)有限公司 | 驾驶辅助控制方法及设备 |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS624948A (ja) * | 1985-06-28 | 1987-01-10 | Toyota Motor Corp | 回転速度センサの異常判定装置 |
| US4934476A (en) * | 1987-09-29 | 1990-06-19 | Aisin Seiki Kabushiki Kaisha | Vehicle speed control system |
| JP2837164B2 (ja) * | 1988-04-22 | 1998-12-14 | 富士通テン株式会社 | 自動車の車間距離制御装置 |
| US4947952A (en) * | 1988-09-05 | 1990-08-14 | Mitsubishi Denki Kabushiki Kaisha | Slow speed cruising control apparatus |
| JP2763927B2 (ja) * | 1989-08-08 | 1998-06-11 | 自動車電機工業株式会社 | 車速自動制御装置 |
| JP2987778B2 (ja) * | 1990-11-30 | 1999-12-06 | アイシン精機株式会社 | 車両速度制御装置 |
| JP3197307B2 (ja) * | 1991-10-14 | 2001-08-13 | マツダ株式会社 | 移動車の走行制御装置 |
| US5680309A (en) * | 1995-06-07 | 1997-10-21 | Cummins Engine Company, Inc. | Control system for automatic resumption of speed control after gear change |
| US6125321A (en) * | 1996-06-07 | 2000-09-26 | Toyota Jidosha Kabushiki Kaisha | Motor vehicle drive system controller and automatic drive controller |
| JP3468001B2 (ja) * | 1996-12-16 | 2003-11-17 | 日産自動車株式会社 | 車両用走行制御装置 |
| KR19980072358A (ko) * | 1997-03-04 | 1998-11-05 | 김영귀 | 자동 정속 주행 장치 |
| DE19745127A1 (de) * | 1997-10-13 | 1999-04-15 | Daimler Chrysler Ag | Vorrichtung und Verfahren zum Verhindern von Kollisionen eines Fahrzeugs mit einem Hindernis beim Einparken des Fahrzeugs |
| SE512086C2 (sv) * | 1998-05-28 | 2000-01-24 | Volvo Ab | Förfarande och anordning för konstantfarthållning |
| JP3757674B2 (ja) * | 1999-04-12 | 2006-03-22 | 日産自動車株式会社 | 車両の駆動力制御装置 |
| JP3690185B2 (ja) | 1999-05-25 | 2005-08-31 | 日産自動車株式会社 | 先行車追従制御装置 |
| JP2001010369A (ja) * | 1999-06-29 | 2001-01-16 | Jidosha Denki Kogyo Co Ltd | クルーズコントロール装置 |
| JP2001030797A (ja) * | 1999-07-26 | 2001-02-06 | Mazda Motor Corp | 車両の走行制御装置 |
| KR100325222B1 (ko) * | 1999-07-28 | 2002-03-04 | 이계안 | 차량용 자동 변속기의 피스톤 스트로크 동작 검출 장치 및 그 방법 |
| JP3620359B2 (ja) | 1999-08-10 | 2005-02-16 | 日産自動車株式会社 | 車両用走行制御装置 |
| KR20010056479A (ko) * | 1999-12-15 | 2001-07-04 | 윤장진 | 사고 자동 경고 장치 및 방법 |
| JP2001246961A (ja) * | 2000-03-07 | 2001-09-11 | Denso Corp | 車間制御装置及び記録媒体 |
| JP4187902B2 (ja) * | 2000-04-28 | 2008-11-26 | 本田技研工業株式会社 | 車両用走行制御装置 |
| JP2002012053A (ja) * | 2000-06-29 | 2002-01-15 | Honda Motor Co Ltd | 車両用走行制御装置 |
| US6600988B1 (en) * | 2000-09-26 | 2003-07-29 | Ford Global Technologies, Inc. | Vehicle trajectory control system and method |
| JP3788240B2 (ja) * | 2001-01-18 | 2006-06-21 | 日産自動車株式会社 | 車両用追従走行制御装置 |
| JP2002234358A (ja) | 2001-02-07 | 2002-08-20 | Honda Motor Co Ltd | 車両用追従走行制御装置 |
| JP2002248963A (ja) * | 2001-02-23 | 2002-09-03 | Tokai Rika Co Ltd | 車両用変速機制御装置 |
| DE60234363D1 (de) * | 2001-09-28 | 2009-12-24 | Jatco Ltd | Gangschaltvorrichtung für automatisches getriebe |
| US6882923B2 (en) * | 2002-10-17 | 2005-04-19 | Ford Global Technologies, Llc | Adaptive cruise control system using shared vehicle network data |
| JP3929870B2 (ja) * | 2002-10-28 | 2007-06-13 | 日産ディーゼル工業株式会社 | 自動変速制御装置 |
| DE10254582A1 (de) | 2002-11-22 | 2004-06-03 | Robert Bosch Gmbh | Geschwindigkeitsregler mit mehreren Betriebsmodi |
| JP2004215350A (ja) * | 2002-12-27 | 2004-07-29 | Sony Corp | 駆動制御装置およびその方法と2輪車 |
| JP4453468B2 (ja) * | 2004-07-16 | 2010-04-21 | 日産自動車株式会社 | 先行車追従走行制御装置 |
| DE602004025864D1 (de) * | 2004-12-10 | 2010-04-15 | Volvo Lastvagnar Ab | Verfahren und rechnerprogramm an einem fahrzeug zur einstellung des abstands zu einem fahrzeug davor |
| JP4635721B2 (ja) * | 2005-05-30 | 2011-02-23 | 日産自動車株式会社 | 車両のオートクルーズ装置 |
| JP4857912B2 (ja) * | 2006-05-29 | 2012-01-18 | 日産自動車株式会社 | 自動変速機の出力軸回転速度推定装置及び異常診断装置並びにオートクルーズ制御装置 |
-
2004
- 2004-07-16 JP JP2004209971A patent/JP4453468B2/ja not_active Expired - Fee Related
-
2005
- 2005-07-12 US US11/178,439 patent/US7460946B2/en not_active Expired - Fee Related
- 2005-07-14 DE DE602005000709T patent/DE602005000709T2/de active Active
- 2005-07-14 EP EP05015339A patent/EP1616744B1/en not_active Expired - Fee Related
- 2005-07-15 KR KR1020050064196A patent/KR100618020B1/ko not_active IP Right Cessation
- 2005-07-18 CN CNB2005100980354A patent/CN100515817C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE602005000709D1 (de) | 2007-04-26 |
| KR20060050212A (ko) | 2006-05-19 |
| EP1616744A1 (en) | 2006-01-18 |
| JP2006027456A (ja) | 2006-02-02 |
| KR100618020B1 (ko) | 2006-09-01 |
| US7460946B2 (en) | 2008-12-02 |
| DE602005000709T2 (de) | 2007-12-06 |
| EP1616744B1 (en) | 2007-03-14 |
| JP4453468B2 (ja) | 2010-04-21 |
| US20060015241A1 (en) | 2006-01-19 |
| CN1728192A (zh) | 2006-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100515817C (zh) | 在前车辆的跟踪巡航控制系统和方法 | |
| CN100476902C (zh) | 车辆巡航控制系统 | |
| US6658344B2 (en) | Vehicle traveling control system with state display apparatus | |
| JP5673691B2 (ja) | 運転支援装置 | |
| CN101462494B (zh) | 用于为车辆提供燃料高效驾驶信息的系统 | |
| EP2017774A2 (en) | Vehicle behavior learning apparatus and vehicle behavior learning program | |
| JP6412404B2 (ja) | 車両用変速制御方法および装置 | |
| CN113811932B (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| US11061400B2 (en) | Control apparatus for vehicle | |
| US6554090B1 (en) | Automobile running control system | |
| CN102892655A (zh) | 车辆控制装置和车辆控制系统 | |
| CN101945786A (zh) | 车辆的减速辅助装置 | |
| CN113811934B (zh) | 车辆的行驶控制方法及行驶控制装置 | |
| JP2012067918A (ja) | 自動車の自動変速機の制御方法 | |
| US20060229793A1 (en) | Vehicular travel control system | |
| GB2497628A (en) | Gear selection device which uses information from an ambient area sensor | |
| CN111731287B (zh) | 变更操作辅助装置 | |
| US20230339515A1 (en) | Drive control method and drive control device | |
| US11204606B2 (en) | Vehicle control device | |
| JP2009143354A (ja) | 車両用制御装置 | |
| JP2003080970A (ja) | 車両速度制御装置 | |
| JP2010215081A (ja) | 運転支援装置 | |
| US20210387525A1 (en) | Method for improving the energy efficiency of a motor vehicle, motor vehicle, and computer-readable medium | |
| KR20100058187A (ko) | 차량 제어방법 | |
| JPH07172211A (ja) | 自動車の車速制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090722 Termination date: 20120718 |